結(jié)構(gòu)因素對(duì)遙感天線跟蹤精度影響分析及對(duì)策
2024-02-21 11:15:42喬建江王寶寶張少輝于衛(wèi)東
無(wú)線電通信技術(shù) 2024年1期
關(guān)鍵詞:機(jī)械結(jié)構(gòu)
喬建江,王寶寶,張 冰,張少輝,于衛(wèi)東
(1.中國(guó)電子科技集團(tuán)公司第五十四研究所,河北 石家莊 050081;2.航天系統(tǒng)部裝備部軍事代表局駐石家莊地區(qū)軍事代表室,河北 石家莊 050081)
0 引言
隨著遙感技術(shù)的進(jìn)步,國(guó)內(nèi)外遙感衛(wèi)星數(shù)據(jù)傳輸逐漸由傳統(tǒng)X頻段向Ka頻段海量數(shù)據(jù)傳輸轉(zhuǎn)變[1]。Ka頻段大口徑遙感衛(wèi)星地面接收站的天線半功率波束寬度很窄,低軌道衛(wèi)星相對(duì)地面接收站天線而言運(yùn)動(dòng)速率快,對(duì)于地面站天線跟蹤Ka頻段低軌道衛(wèi)星的要求變得越來(lái)越高。在Ka頻段衛(wèi)星地面站中,跟蹤精度是天線伺服控制系統(tǒng)的關(guān)鍵技術(shù)指標(biāo)[2-4],該指標(biāo)最能夠反映遙感系統(tǒng)整體跟蹤性能。影響Ka頻段遙感地面站天線跟蹤精度的因素很多,主要有結(jié)構(gòu)機(jī)械結(jié)構(gòu)的諧振頻率、摩擦等[2-3]。其中機(jī)械結(jié)構(gòu)諧振頻率對(duì)天線伺服跟蹤帶寬、跟蹤動(dòng)態(tài)特性和跟蹤精度影響很大,甚至導(dǎo)致天線跟蹤失敗;摩擦對(duì)天線跟蹤隨機(jī)誤差影響也很大,最壞可導(dǎo)致天線隨機(jī)誤差指標(biāo)嚴(yán)重超標(biāo)。所以在工程應(yīng)用中,需要根據(jù)實(shí)際情況對(duì)影響跟蹤精度的各種因素進(jìn)行分析,根據(jù)不同情況采用不同方法提高伺服跟蹤精度,滿足系統(tǒng)技術(shù)指標(biāo)要求。
隨著天線跟蹤精度不斷提高,傳統(tǒng)比例-積分-微分(Proportional-Integral-Derivative,PID)控制技術(shù)很難滿足伺服控制精度需求。近些年,研究人員提出了變積分PID[5]、復(fù)合控制[6]、變積分PID與計(jì)算機(jī)輔助跟蹤結(jié)合[7]、利用正割補(bǔ)償實(shí)現(xiàn)高仰角動(dòng)態(tài)滯后補(bǔ)償[8]和積分式PID[9]等方法,這些方法雖然提升了天線跟蹤精度,但是對(duì)天線結(jié)構(gòu)因素影響缺少分析,大多是伺服控制算法本身的改進(jìn)。
針對(duì)天線結(jié)構(gòu)因素對(duì)跟蹤精度的影響,本文以某遙感地面站天線設(shè)備Ka頻段高精度跟蹤為應(yīng)用背景,分析了機(jī)械結(jié)構(gòu)諧振頻率、摩擦等結(jié)構(gòu)因素對(duì)遙感地面站天線設(shè)備跟蹤精度的影響,給出了對(duì)應(yīng)的解決措施,并且針對(duì)機(jī)械結(jié)構(gòu)諧振頻率較低對(duì)伺服跟蹤動(dòng)態(tài)性能的影響,提出了一種數(shù)字復(fù)合控制融合新型結(jié)構(gòu)濾波器(數(shù)字凹口濾波器+一階慣性環(huán)節(jié))的動(dòng)態(tài)跟蹤控制方法,等效提高了伺服帶寬,抑制了天線機(jī)械結(jié)構(gòu)諧振,保證了Ka頻段天線窄波束、高精度的穩(wěn)定過(guò)頂跟蹤。
1 結(jié)構(gòu)因素對(duì)伺服動(dòng)態(tài)性能的影響
1.1 結(jié)構(gòu)諧振頻率的影響
遙感地面站天線設(shè)備中,天線跟蹤精度主要受伺服動(dòng)態(tài)性能影響,而伺服動(dòng)態(tài)性能又由伺服帶寬決定。雖然在小口徑天線系統(tǒng)中,天線結(jié)構(gòu)諧振頻率一般遠(yuǎn)遠(yuǎn)落在伺服帶寬以外,對(duì)伺服系統(tǒng)影響很小,但是對(duì)于大口徑天線來(lái)說(shuō),機(jī)械結(jié)構(gòu)因素中結(jié)構(gòu)諧振頻率對(duì)伺服帶寬影響甚大。天線剛度越大,轉(zhuǎn)動(dòng)慣量越小,機(jī)械結(jié)構(gòu)諧振頻率越高。
實(shí)際工程中,根據(jù)已建成的許多天線結(jié)構(gòu)的基頻數(shù)據(jù)統(tǒng)計(jì),可由式(1)完成結(jié)構(gòu)諧振頻率的快速估算[10-11]:
fL=20.0D-0.7,
(1)
式中:fL為機(jī)械結(jié)構(gòu)諧振頻率,單位Hz;D為天線口徑,單位m。
影響天線機(jī)械結(jié)構(gòu)諧振頻率的主要因素有天線驅(qū)動(dòng)鏈剛度和天線轉(zhuǎn)動(dòng)慣量,更加精確的天線結(jié)構(gòu)諧振頻率估算一般有如下公式[12]:
(2)
式中:fL為機(jī)械結(jié)構(gòu)諧振頻率,單位Hz;K為天線驅(qū)動(dòng)鏈剛度,單位N·m/rad;J為天線轉(zhuǎn)動(dòng)慣量,單位kg·m2。
天線機(jī)械結(jié)構(gòu)諧振頻率的降低會(huì)對(duì)天線動(dòng)態(tài)跟蹤穩(wěn)定性能產(chǎn)生影響,導(dǎo)致天線跟蹤抖動(dòng),甚至發(fā)生天線機(jī)械結(jié)構(gòu)諧振。
圖1(a)所示結(jié)構(gòu)諧振頻率如果出現(xiàn)在伺服帶寬之外,只是影響伺服特性高頻段,對(duì)伺服動(dòng)態(tài)特性影響很小。如果天線轉(zhuǎn)動(dòng)慣量大、驅(qū)動(dòng)鏈結(jié)構(gòu)剛度較小,天線機(jī)械結(jié)構(gòu)諧振頻率點(diǎn)位于伺服環(huán)路特性曲線的中頻區(qū),如圖1(b)所示,結(jié)構(gòu)諧振頻率對(duì)伺服動(dòng)態(tài)性能影響比較大,甚至導(dǎo)致伺服系統(tǒng)環(huán)路振蕩。
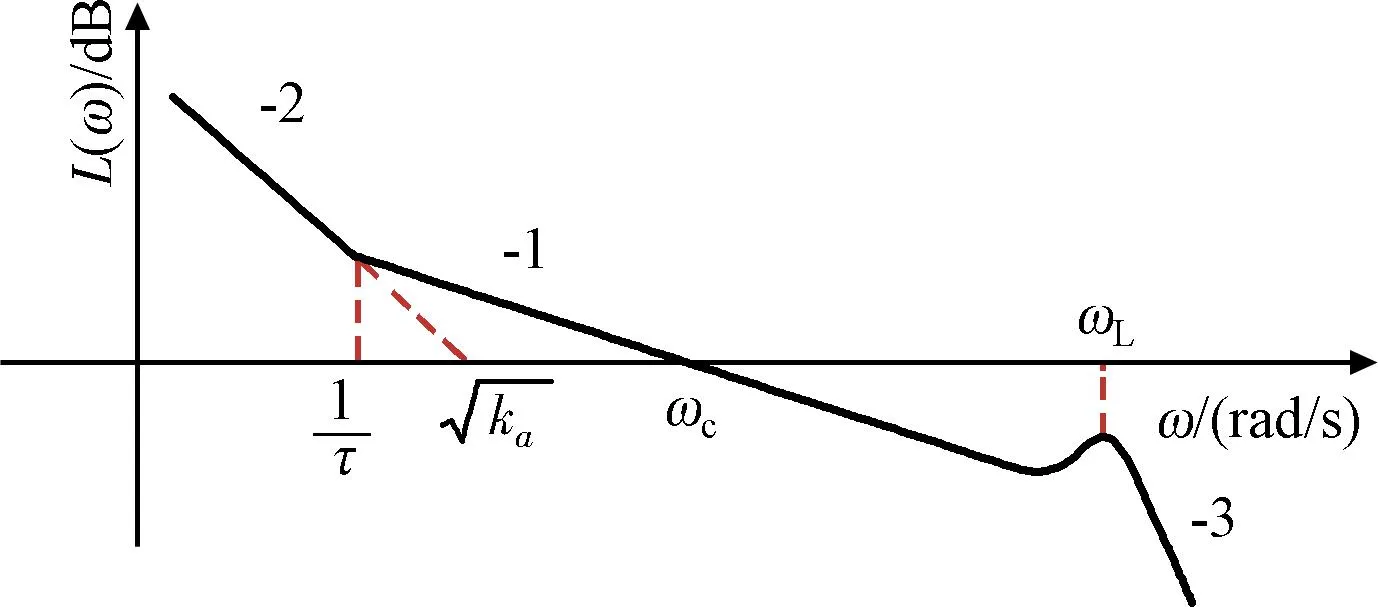
(a) 穩(wěn)定
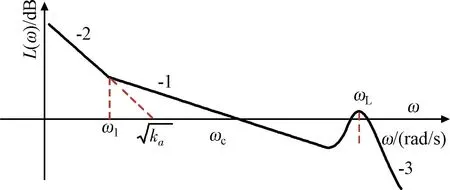
(b) 不穩(wěn)定
由式(2)可知,在相同結(jié)構(gòu)諧振頻率情況下,增加天線結(jié)構(gòu)驅(qū)動(dòng)鏈剛度,天線結(jié)構(gòu)轉(zhuǎn)動(dòng)慣量一定會(huì)增加;同樣,減少天線結(jié)構(gòu)的轉(zhuǎn)動(dòng)慣量,天線剛度也一定會(huì)降低。由此可見,在實(shí)際大口徑天線工程設(shè)計(jì)中,很難將天線結(jié)構(gòu)剛度和天線轉(zhuǎn)動(dòng)慣量都設(shè)計(jì)成最佳值,結(jié)構(gòu)諧振頻率也不易設(shè)計(jì)得很高。對(duì)于大口徑天線系統(tǒng)來(lái)說(shuō),伺服帶寬和穩(wěn)定裕度主要受結(jié)構(gòu)諧振頻率和阻尼系數(shù)的影響。工程設(shè)計(jì)時(shí),天線伺服帶寬一般應(yīng)用計(jì)算如下[2]:
ωB=2×ξL×ωL,
(3)
式中:ωB為伺服帶寬,單位rad;ξL為機(jī)械阻尼系數(shù),一般取0.1~0.3;ωL為機(jī)械結(jié)構(gòu)諧振頻率,單位rad。
由式(3)可以看出伺服帶寬不但和機(jī)械結(jié)構(gòu)諧振頻率有關(guān),還和天線座機(jī)械阻尼系數(shù)有關(guān),但是一般提高機(jī)械阻尼系數(shù)比較困難。
為保證伺服系統(tǒng)具有良好的動(dòng)態(tài)性能,一般伺服系統(tǒng)要求[2-3]相位裕度γ≥π/4,幅值裕度G≥6 dB。機(jī)械結(jié)構(gòu)諧振頻率直接影響伺服環(huán)路帶寬,從而影響伺服系統(tǒng)動(dòng)態(tài)跟蹤性能和跟蹤精度,現(xiàn)代伺服設(shè)計(jì)普遍采用計(jì)算機(jī)控制,一些非線性因素得到了很大的抑制,同等結(jié)構(gòu)諧振頻率情況下,伺服帶寬可以提高一些,達(dá)到結(jié)構(gòu)諧振頻率的1/4~1/3[2]。
工程上,遙感地面站伺服控制系統(tǒng)一般都設(shè)計(jì)為二階無(wú)靜差系統(tǒng),伺服動(dòng)態(tài)滯后誤差是伺服跟蹤誤差的主要誤差源[2-4],該項(xiàng)誤差主要是伺服加速度引起的動(dòng)態(tài)滯后[5-7]:
(4)
式中:Δe1為動(dòng)態(tài)滯后誤差,單位(°);為保精度最大角加速度,單位(°)/s2;Emax為保精度角加速度產(chǎn)生時(shí)的最大仰角,單位(°);ka為加速度增益常數(shù),單位rad/s2。加速度增益常數(shù)ka受伺服帶寬制約,一般二型系統(tǒng)中[2]:
(5)
式中:βn為伺服噪聲帶寬,單位Hz。在大多數(shù)工程中,天線機(jī)械結(jié)構(gòu)諧振頻率不能進(jìn)一步提高的情況下,可以在伺服系統(tǒng)環(huán)路設(shè)計(jì)上采取措施,抑制天線機(jī)械結(jié)構(gòu)諧振頻率的峰值。
1.2 摩擦的影響
對(duì)于Ka頻段高精度天線伺服控制系統(tǒng),摩擦環(huán)節(jié)的存在對(duì)提高伺服動(dòng)態(tài)性能影響很大。在天線轉(zhuǎn)動(dòng)慣量固定不變的情況下,天線摩擦力矩基本上是常量,伺服系統(tǒng)輸出有較大靜誤差[12],天線跟蹤隨機(jī)誤差比較大,尤其是在跟蹤較低速度加速度目標(biāo)時(shí),跟蹤誤差角很小,電機(jī)輸出的力矩?zé)o法克服摩擦力矩的影響,導(dǎo)致伺服傳動(dòng)系統(tǒng)不能順利啟動(dòng),產(chǎn)生了一個(gè)±ε(t)范圍內(nèi)的不靈敏區(qū)(死區(qū)),如圖2所示。
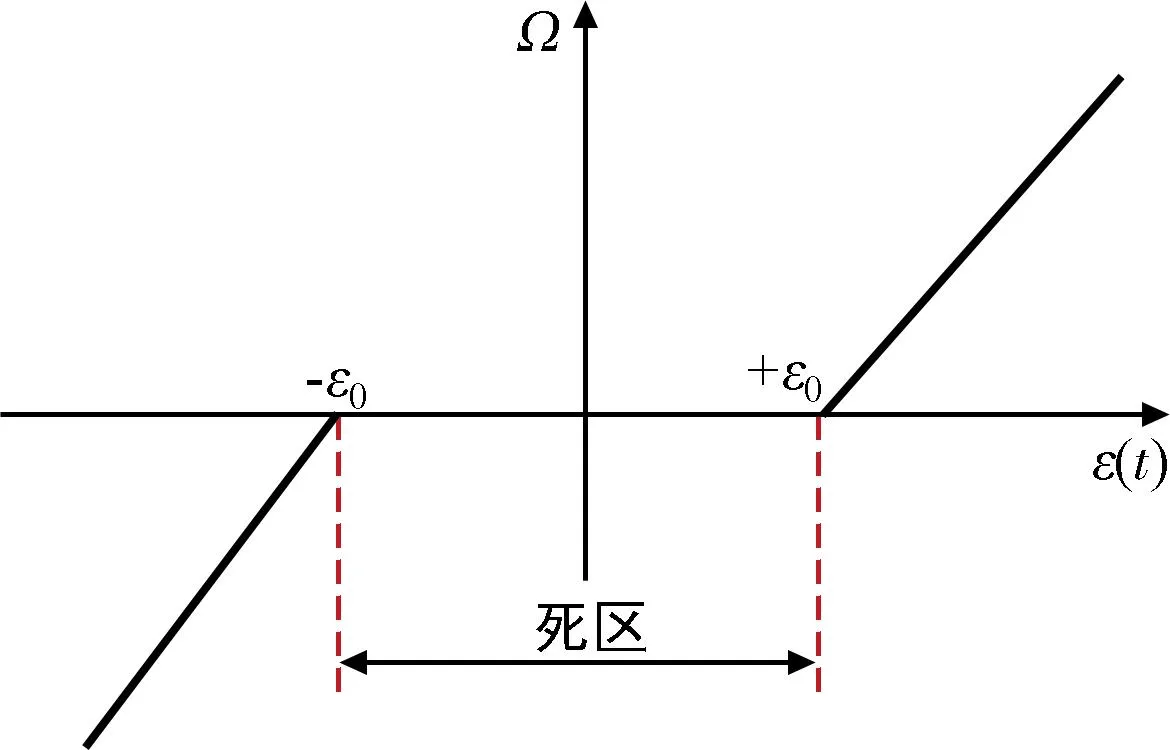
圖2 摩擦引起的死區(qū)模型Fig.2 Dead zone caused by friction model
這個(gè)死區(qū)經(jīng)常導(dǎo)致伺服控制系統(tǒng)出現(xiàn)不均勻的跳動(dòng)或爬行現(xiàn)象,進(jìn)而產(chǎn)生低速跟蹤不平穩(wěn)誤差[12-13]。工程上,要求高精度天線傳動(dòng)系統(tǒng)的摩擦力矩Mf小于伺服電機(jī)額定輸出力矩Mm的10%[13]。
Mf=0.1×Mm。
(6)
系統(tǒng)結(jié)構(gòu)摩擦力矩分為靜態(tài)摩擦力矩MFS、庫(kù)倫摩擦力矩MF1和速度摩擦力矩MF2等[14]。
Mf=MFS+MF1+MF2。
(7)
天線反射體的質(zhì)量和驅(qū)動(dòng)鏈摩擦系數(shù)是影響摩擦力矩的主要因素,在天線驅(qū)動(dòng)鏈沒(méi)有發(fā)生變化時(shí),它的摩擦系數(shù)保持恒定。摩擦力矩影響伺服系統(tǒng)截止頻率,在天線轉(zhuǎn)動(dòng)慣量一定的情況下,伺服系統(tǒng)截止頻率與摩擦力矩的平方根成正比。摩擦力矩還影響伺服低速跟蹤角速度大小,在低速狀態(tài),庫(kù)倫摩擦增加時(shí),影響伺服低速運(yùn)行穩(wěn)定性,導(dǎo)致跟蹤隨機(jī)誤差增大。
天線低速性能取決于天線摩擦、剛度以及調(diào)速范圍等因素,在工程上,一般在天線設(shè)計(jì)時(shí)可采用全數(shù)字電機(jī)控制器和驅(qū)動(dòng)器,利用數(shù)字總線進(jìn)行命令傳輸,提高信號(hào)傳輸抗干擾能力并減小伺服誤差和零漂;通過(guò)數(shù)字碼盤反饋替代模擬測(cè)速機(jī),提高電機(jī)測(cè)速反饋信號(hào)線性度和分辨率;采用低速大力矩電機(jī),滿足天線伺服系統(tǒng)低速時(shí),電機(jī)力矩可以比較容易地克服天線摩擦力矩,保證伺服系統(tǒng)低速運(yùn)行平穩(wěn),減小伺服系統(tǒng)跟蹤隨機(jī)誤差。
2 融合結(jié)構(gòu)濾波器的跟蹤控制方法
本文提出了一種數(shù)字復(fù)合控制融合數(shù)字凹口濾波器+一階慣性環(huán)節(jié)的動(dòng)態(tài)跟蹤控制方法,等效提高了天線結(jié)構(gòu)阻尼系數(shù)、伺服帶寬及伺服穩(wěn)定裕度,減小了伺服動(dòng)態(tài)滯后誤差,提高了伺服動(dòng)態(tài)跟蹤精度。
2.1 數(shù)字凹口濾波器
在中大口徑天線跟蹤控制系統(tǒng)中經(jīng)常出現(xiàn)機(jī)械結(jié)構(gòu)諧振頻率較低,伺服帶寬不夠高,影響伺服動(dòng)態(tài)跟蹤穩(wěn)定的問(wèn)題。為了保證伺服控制系統(tǒng)的穩(wěn)定性,必須要求系統(tǒng)幅值裕度不小于6 dB[15],但大口徑天線機(jī)械諧振阻尼很小[16],諧振頻率峰值又很大,設(shè)計(jì)較高帶寬的伺服比較困難,于是引入凹口濾波器網(wǎng)絡(luò)[16-17]來(lái)抑制天線結(jié)構(gòu)諧振的影響,保證伺服控制系統(tǒng)穩(wěn)定。
伺服環(huán)路中所采用的凹口濾波器傳遞函數(shù)如下所示[15,17]:
(8)
式中:ξ2=10ξ1,1/T點(diǎn)和天線座機(jī)械結(jié)構(gòu)諧振峰值的地方完全對(duì)準(zhǔn)。二階微分環(huán)節(jié)T2S2+2ξ1TS+1和二階振蕩環(huán)節(jié)1/(T2S2+2ξ1TS+1)在1/T點(diǎn)前后二者幅度、相位完全對(duì)消,而在1/T處即天線座機(jī)械結(jié)構(gòu)諧振峰值的地方形成一個(gè)凹口,這樣就有效減小了天線結(jié)構(gòu)諧振的峰值,等效增加了天線結(jié)構(gòu)阻尼系數(shù)。
對(duì)式(8)進(jìn)行變換,如式(9)所示:
(9)
在軟件設(shè)計(jì)中需要對(duì)凹口濾波器算法進(jìn)行離散化,數(shù)字離散化通過(guò)雙線性變換實(shí)現(xiàn),然后編程處理。采用雙線性變換法離散化,則:
(10)

可以得到差分方程為:
(11)
2.2 前饋控制融合結(jié)構(gòu)濾波器的跟蹤控制算法
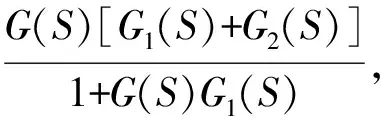
針對(duì)Ka頻段中大口徑天線大動(dòng)態(tài)、窄波束穩(wěn)定跟蹤需求,為使伺服控制系統(tǒng)滿足一定的動(dòng)態(tài)跟蹤和靜態(tài)跟蹤要求,在伺服控制系統(tǒng)設(shè)計(jì)時(shí)采用數(shù)字前饋控制來(lái)提高伺服控制系統(tǒng)無(wú)靜差度,使伺服控制系統(tǒng)從一階無(wú)靜差系統(tǒng)提高到二階無(wú)靜差系統(tǒng)[18-19],等效提高了伺服帶寬,大大降低了伺服動(dòng)態(tài)滯后誤差。伺服控制器傳遞函數(shù)為G1(S),前饋控制的傳遞函數(shù)為G2(S),此時(shí)伺服控制系統(tǒng)的原理圖如圖3所示[18-19]。
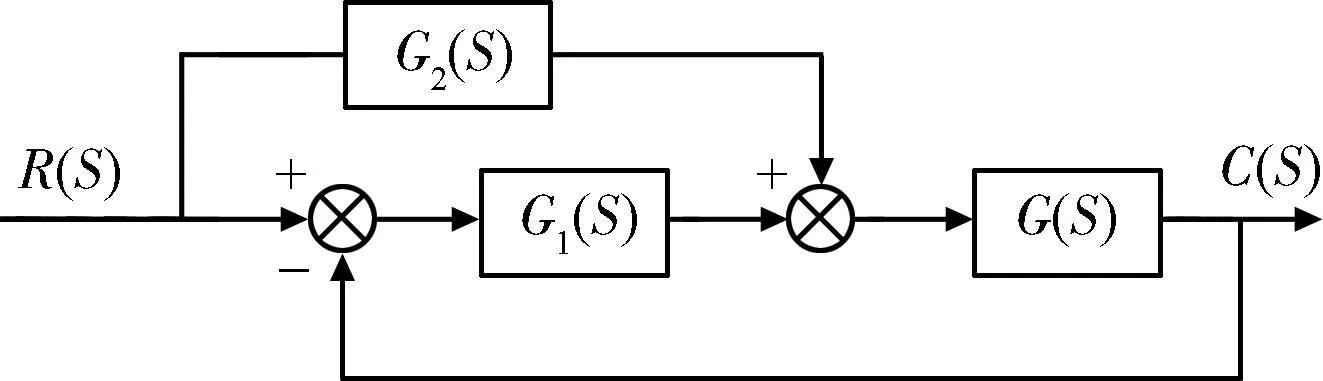
圖3 前饋控制原理圖Fig.3 Schematic block diagram of feedforward control
文獻(xiàn)[20]提出了針對(duì)正割補(bǔ)償?shù)膬?yōu)化算法,降低了伺服動(dòng)態(tài)跟蹤特性,減小了天線振蕩,但是這種方法在速度較快目標(biāo)過(guò)頂時(shí)依然有較大的動(dòng)態(tài)滯后誤差。根據(jù)天線系統(tǒng)結(jié)構(gòu)諧振較低、天線工作易不穩(wěn)定的問(wèn)題,本文提出了一種新型的結(jié)構(gòu)濾波器,這種濾波器不同于傳統(tǒng)單獨(dú)凹口濾波器設(shè)計(jì),而是采用組合兩個(gè)凹口濾波器(如圖4)+一階慣性環(huán)節(jié)的濾波器,克服了單個(gè)濾波器在天線結(jié)構(gòu)諧振頻率發(fā)生變化時(shí)無(wú)法抵消抑制的問(wèn)題。融合新型結(jié)構(gòu)濾波器的復(fù)合控制原理框圖如5所示,虛線框中綠色部分為新型結(jié)構(gòu)濾波器。
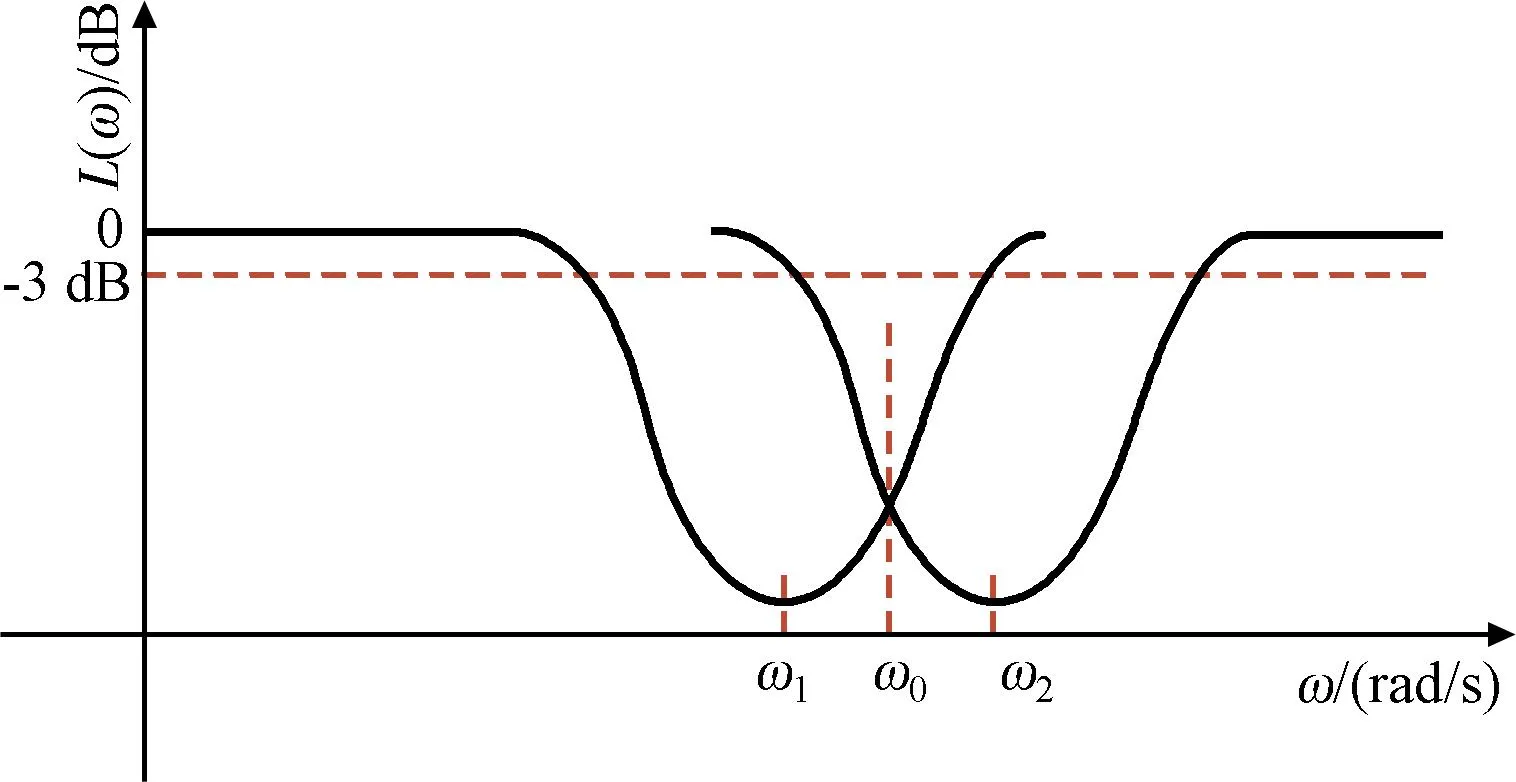
圖4 兩個(gè)凹口濾波器波特圖示意Fig.4 Bode curves of two digital notch filters

圖5 融合新型結(jié)構(gòu)濾波器的復(fù)合控制原理框圖Fig.5 Principle block diagram of composite control for fusion structural filter
(12)
G3(S)濾波器傳遞函數(shù)如式(13)所示:
(13)
式中:
(14)
(15)
ξ2=10ξ1。
(16)
G4(S)為一階低通濾波器的傳遞函數(shù):
(17)
在速度環(huán)增加了數(shù)字凹口濾波器(式(12))和一階慣性環(huán)節(jié)(式(17))來(lái)抑制諧振,同時(shí)一階慣性環(huán)節(jié)作為低通濾波器,具備濾高通低功能,可以濾除信號(hào)中的高次諧波,改善了伺服系統(tǒng)的特性,預(yù)防伺服系統(tǒng)發(fā)生結(jié)構(gòu)諧振,等效提高了伺服系統(tǒng)帶寬[16],改變了伺服系統(tǒng)環(huán)路幅頻特性的斜率,壓低了伺服系統(tǒng)的諧振峰值,增加了伺服系統(tǒng)的幅度裕度,改善了系統(tǒng)動(dòng)態(tài)特性品質(zhì)。因此當(dāng)輸入偏差變化率很大時(shí),可以有效控制伺服系統(tǒng)的輸出,起到了調(diào)節(jié)系統(tǒng)品質(zhì)的作用。
3 工程應(yīng)用及測(cè)試結(jié)果
3.1 新型結(jié)構(gòu)濾波器應(yīng)用結(jié)果
圖6為某方位-俯仰-第三軸型12 m天線伺服控制系統(tǒng)的位置環(huán)階躍響應(yīng)測(cè)試結(jié)果。
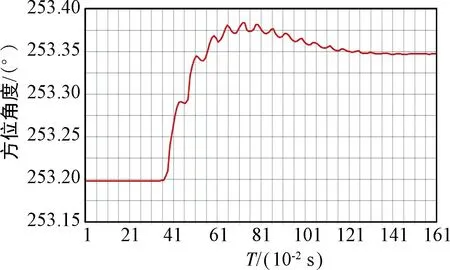
圖6 未加新型數(shù)字結(jié)構(gòu)濾波器器的方位位置環(huán)階躍曲線Fig.6 Step curce of azimuth position loop without new digital tructural filter
從圖6可以明顯看出,天線階躍測(cè)試曲線中疊加了諧振頻率為3.6 Hz的波形,引起了天線的振蕩,天線穩(wěn)定時(shí)間增加,工作不穩(wěn)定。在伺服速度環(huán)中引入新型結(jié)構(gòu)濾波器即增加兩個(gè)諧振頻率為f1=3.4 Hz和f2=3.8 Hz的濾波器,分別布置在結(jié)構(gòu)諧振頻率的兩側(cè),這樣設(shè)計(jì)的凹口濾波器有一定深度和寬度,濾波器中心頻率位于3.6 Hz,完美抑制了天線結(jié)構(gòu)諧振頻率的影響,實(shí)現(xiàn)了天線穩(wěn)定工作,如圖7所示。
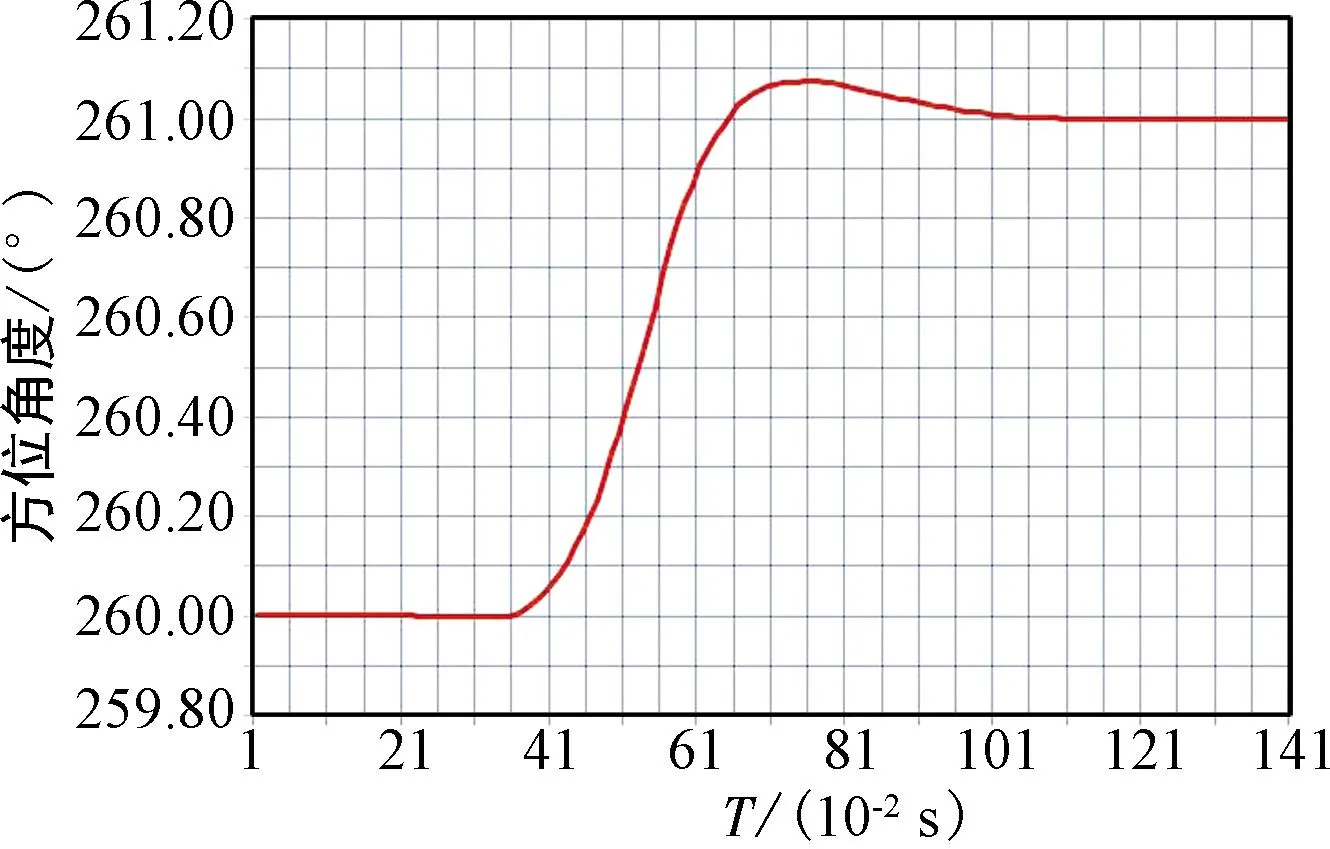
圖7 加新型數(shù)字結(jié)構(gòu)濾波器的方位位置環(huán)階躍曲線Fig.7 Step curce of azimuth position loop with new digital tructural filter
3.2 低速性能測(cè)試結(jié)果
圖8為某方位-俯仰-第三軸型12 m天線伺服系統(tǒng)低速性能測(cè)試結(jié)果。
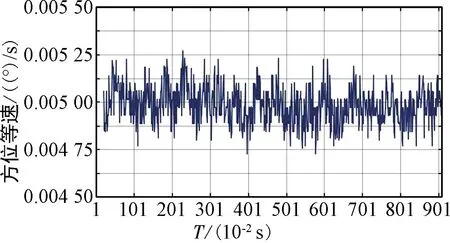
(a) 低速運(yùn)行曲線(命令值:0.005 (°)/s)
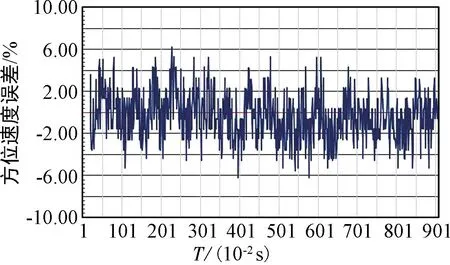
(b) 低速運(yùn)行誤差曲線
從圖8可以看出,本天線系統(tǒng)采用低速設(shè)計(jì)技術(shù)措施后,天線伺服低速性能和伺服調(diào)速比大大提高,天線最低平穩(wěn)運(yùn)行速度優(yōu)于0.005 (°)/s。低速運(yùn)行過(guò)程中,速度誤差均在10%以下,天線運(yùn)行連續(xù)、平穩(wěn)、無(wú)“爬行”現(xiàn)象。
3.3 跟蹤測(cè)試結(jié)果分析
某方位-俯仰-第三軸型12 m天線利用Ka頻段低軌道衛(wèi)星動(dòng)態(tài)目標(biāo)模擬數(shù)據(jù)(衛(wèi)星軌道高度600 km,對(duì)于三軸天線最大角加速度為0.393 (°)/s2,最大角速度5.85 (°)/s,采用方位、俯仰軸保持單脈沖自跟蹤,同時(shí)驅(qū)動(dòng)天線第三軸運(yùn)動(dòng)的方式跟蹤信標(biāo)塔Ka頻段信標(biāo),以動(dòng)態(tài)方式模擬Ka頻段跟蹤的方法[21]來(lái)測(cè)試驗(yàn)證跟蹤系統(tǒng)的動(dòng)態(tài)跟蹤性能,測(cè)試結(jié)果如圖9所示。
測(cè)試結(jié)果表明:第三軸模擬加速度在0.393 (°)/s2時(shí),方位動(dòng)態(tài)跟蹤均方根誤差優(yōu)于0.006 2°,滿足Ka頻段1/10半功率波瓣寬度的跟蹤精度指標(biāo)要求。Ka頻段遙感地面站天線系統(tǒng)動(dòng)態(tài)跟蹤性能測(cè)試結(jié)果和設(shè)計(jì)指標(biāo)基本吻合,實(shí)際跟蹤測(cè)試結(jié)果驗(yàn)證了新型結(jié)構(gòu)濾波器對(duì)12 m三軸遙感接收天線機(jī)械結(jié)構(gòu)諧振抑制的有效性。
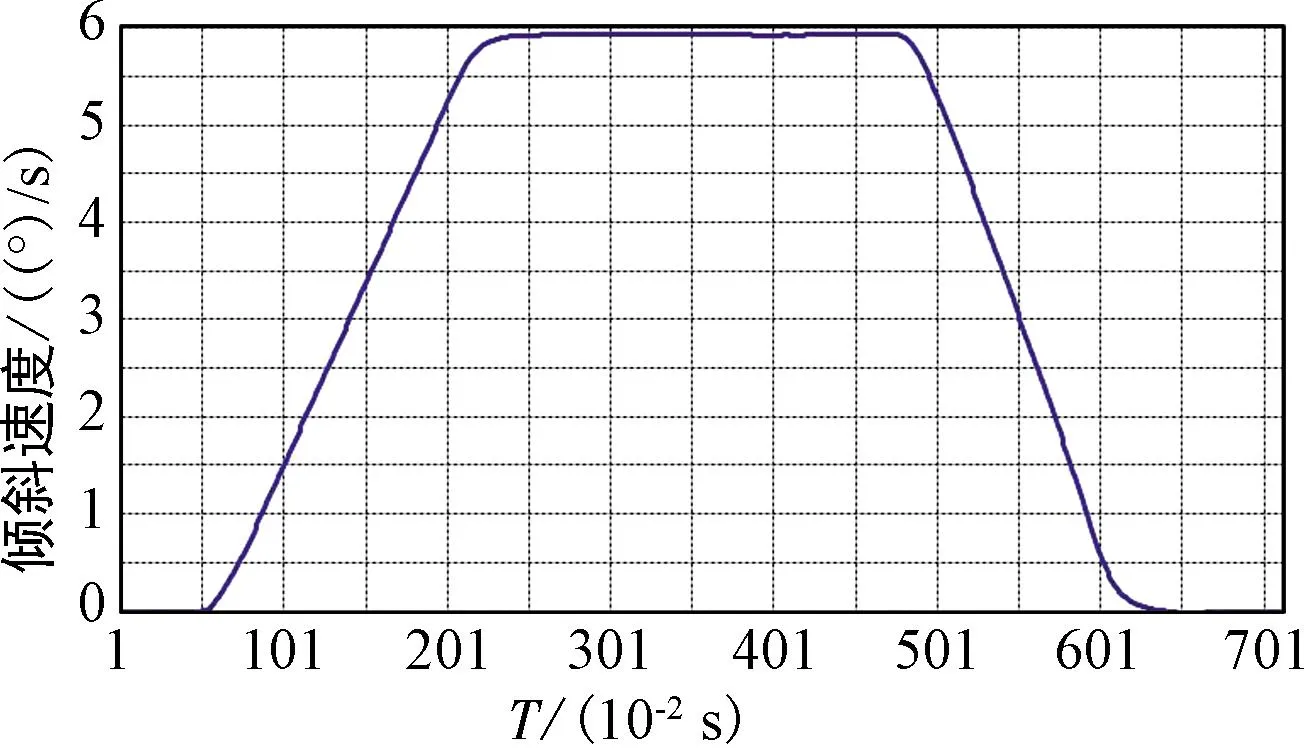
(a) 第三軸運(yùn)動(dòng)傾斜速度曲線
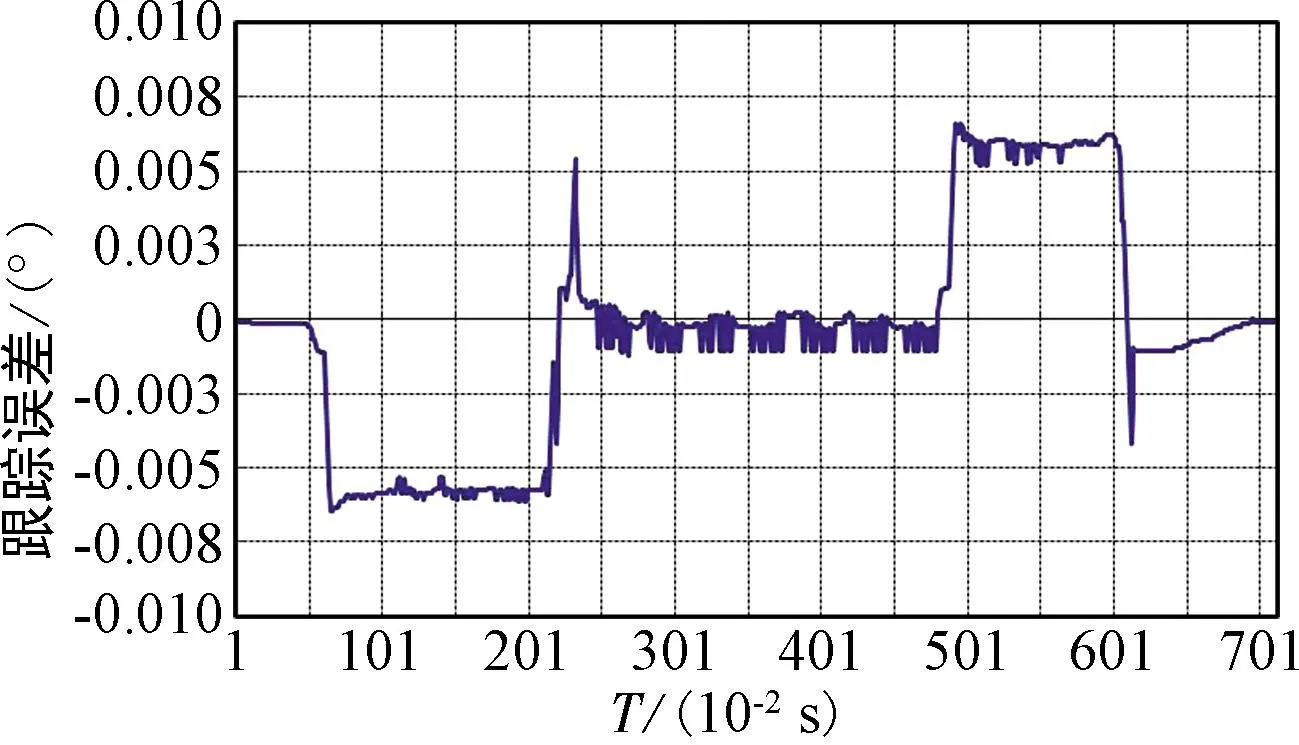
(c) 方位跟蹤誤差曲線
4 結(jié)束語(yǔ)
在Ka頻段衛(wèi)星數(shù)據(jù)接收站中,結(jié)構(gòu)因素對(duì)天線跟蹤精度影響很大。當(dāng)天線跟蹤速度和加速度較大時(shí),天線機(jī)械結(jié)構(gòu)諧振頻率成為主要影響因素,影響伺服動(dòng)態(tài)滯后誤差;而當(dāng)天線跟蹤低速運(yùn)動(dòng)的目標(biāo)時(shí),摩擦力矩成為影響跟蹤隨機(jī)誤差的一個(gè)關(guān)鍵因素,影響伺服低速跟蹤平穩(wěn)性,加大系統(tǒng)跟蹤隨機(jī)誤差。在12 m口徑天線設(shè)計(jì)中,為進(jìn)一步提高伺服跟蹤精度,在系統(tǒng)跟蹤環(huán)路設(shè)計(jì)時(shí)采用了數(shù)字前饋控制融合新型結(jié)構(gòu)濾波器(數(shù)字凹口濾波器+一階慣性環(huán)節(jié))的跟蹤控制技術(shù)措施,改善了伺服控制系統(tǒng)的動(dòng)態(tài)跟蹤性能,等效提高了伺服帶寬,提高了系統(tǒng)跟蹤精度。研究?jī)?nèi)容緊密結(jié)合工程實(shí)際,對(duì)于Ka頻段三軸斜臺(tái)座架過(guò)頂跟蹤伺服控制系統(tǒng)的設(shè)計(jì)具有理論指導(dǎo)意義。
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
電腦報(bào)(2019年40期)2019-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49