無人駕駛蝦蟹投飼自主作業(yè)船及智能管控平臺研發(fā)與應(yīng)用
2024-02-22 09:48:00姜寬舒宋元山孟祥威孟德偉
科學(xué)技術(shù)創(chuàng)新 2024年3期
姜寬舒,于 泓,宋元山,孟祥威,丁 皓,孟德偉
(1.江蘇農(nóng)林職業(yè)技術(shù)學(xué)院,江蘇 句容;2.江蘇大學(xué),江蘇 鎮(zhèn)江)
引言
我國是水產(chǎn)養(yǎng)殖和消費(fèi)的大國,養(yǎng)殖產(chǎn)量已經(jīng)在世界上占很大的比例,但是養(yǎng)殖模式還是相對傳統(tǒng)落后,已經(jīng)不能滿足日益增長的消費(fèi)需求。其智能化水平與養(yǎng)殖模式相對于歐美、日等發(fā)達(dá)國家而言還是相對落后很多[1]。傳統(tǒng)的養(yǎng)殖模式需要依靠大量的人力成本,而且餌料投放也不合理,精確導(dǎo)航和智能餌料補(bǔ)給相對落后,這種養(yǎng)殖模式不僅耗時耗力,且嚴(yán)重制約了養(yǎng)殖效率和規(guī)模[2]。歐美、日等發(fā)達(dá)國家的精準(zhǔn)導(dǎo)航定位技術(shù)發(fā)展較早,其水產(chǎn)養(yǎng)殖技術(shù)相對先進(jìn),智能化程度也比較高,自動導(dǎo)航、船舶控制等技術(shù)也已被廣泛地運(yùn)用于水產(chǎn)養(yǎng)殖的多個方面,大大地提高了養(yǎng)殖效益。目前,國內(nèi)外對于集成了自動均勻投餌技術(shù)、無人作業(yè)船控制技術(shù)的水產(chǎn)養(yǎng)殖作業(yè)船研究不多,但是針對相關(guān)的技術(shù)分別出現(xiàn)了一些典型成果。
意大利的Techno SEA 公司早在20 世紀(jì)末期就已將自動投餌技術(shù)應(yīng)用于浮體網(wǎng)箱養(yǎng)殖,并配套設(shè)計出了下沉式自動投餌機(jī)。該投餌機(jī)可全天候進(jìn)行投餌,適用于不同類型、品質(zhì)和大小的顆粒飼料,不足的是儲料空間太小。日本NITT0 SEIKO 公司研發(fā)了小料倉集成控制投餌系統(tǒng),該系統(tǒng)利用控制模塊對安置在每個網(wǎng)箱上方的多個小料倉實(shí)現(xiàn)集成控制,其配套設(shè)施或裝備大多借助軌道和電力驅(qū)動滑車等形式的行走機(jī)構(gòu)完成移動投餌。這種軌道形式需預(yù)先布置安裝,其工期較長、成本較大、靈活性不強(qiáng),不利于大面積推廣[3-4]。目前,國內(nèi)規(guī)模化水產(chǎn)養(yǎng)殖投餌喂料主要采用幾種方式:①人工撐船,人力投餌喂料,一人撐船,一人或兩人投餌,僅憑人工經(jīng)驗(yàn),工作效率低,勞動強(qiáng)度大,無法保證投餌的均勻度;②人工撐船,船載投餌機(jī)投餌喂料,這種方式雖然可以通過投飼機(jī)置換部分勞動力,但同樣存在船行進(jìn)的路線全憑人工隨意確定,隨機(jī)性大,很難保證投餌的均勻度;③遙控自動投餌船,雖能根據(jù)人為遙控在池塘中投料,但投喂量依然由人工經(jīng)驗(yàn)確定,航行路線隨機(jī)性強(qiáng)[5]。以上三種方式都無法完全用機(jī)器換人,并且都無法實(shí)現(xiàn)精準(zhǔn)均勻投飼,不利于大規(guī)格蝦蟹的培育,導(dǎo)致養(yǎng)殖效益低下。由此可見,國內(nèi)現(xiàn)有產(chǎn)品和其他科研單位所研發(fā)機(jī)具在功能上僅僅實(shí)現(xiàn)了機(jī)械化投餌,無法實(shí)現(xiàn)按生長需求精準(zhǔn)飼喂,以及投飼飼料在生長區(qū)域內(nèi)均勻分布[6]。
針對以上的技術(shù)瓶頸和行業(yè)痛點(diǎn),本文在傳統(tǒng)的單一功能人工水產(chǎn)養(yǎng)殖船基礎(chǔ)上,研發(fā)基于GPS-RTK 技術(shù)的自主導(dǎo)航水產(chǎn)養(yǎng)殖作業(yè)船與智能管控系統(tǒng),再基于“物聯(lián)網(wǎng)+大數(shù)據(jù)”技術(shù),開發(fā)一種多水域集群作業(yè)自主導(dǎo)航水產(chǎn)養(yǎng)殖船智能管控平臺。本項(xiàng)目主要針對較大水域或多片水域養(yǎng)殖,通過APM中央控制器以及開源地面站測控軟件,結(jié)合GNSS-RKT和慣性導(dǎo)航系統(tǒng),實(shí)現(xiàn)作業(yè)船航行路徑規(guī)劃、水域自主巡航、精準(zhǔn)投餌、均勻施藥等多種功能,每條無人船對接水產(chǎn)養(yǎng)殖管控平臺,實(shí)現(xiàn)多水域大規(guī)模無人化集群作業(yè),最終達(dá)到提高蝦蟹品質(zhì)、降低投飼飼料和人力成本、減少環(huán)境污染,提高作業(yè)效率的目的,有效提高蝦蟹養(yǎng)殖的經(jīng)濟(jì)效益與社會效益。
1 無人船總體結(jié)構(gòu)設(shè)計
船體設(shè)計載重量200 KG,投餌、施藥、明輪動力轉(zhuǎn)向、輔助增氧、水質(zhì)監(jiān)測等執(zhí)行裝置均由一個電壓為12 V、容量為200 Ah 的鋰電池提供動力,太陽能電池板輔助供電,能夠在兼顧作業(yè)效率的情況下滿足45 min 超長續(xù)航。船體的三維結(jié)構(gòu)設(shè)計示意如圖1 所示。同時,本研發(fā)設(shè)計的無人駕駛蝦蟹投飼作業(yè)船還兼具路徑規(guī)劃、自主導(dǎo)航、水質(zhì)監(jiān)測實(shí)施反饋、水質(zhì)異常預(yù)警、集群控制作業(yè)等集成功能,具體的研發(fā)和推廣技術(shù)路線如圖2 所示。無人船多次迭代優(yōu)化,依次經(jīng)歷了單體結(jié)構(gòu)、明輪結(jié)構(gòu)、雙體結(jié)構(gòu)、隱藏式雙推進(jìn)器結(jié)構(gòu)。船體的穩(wěn)定性、負(fù)載能力、抗傾覆性、避免纏水草等綜合性能大幅提升。結(jié)構(gòu)更加合理,便于推廣。
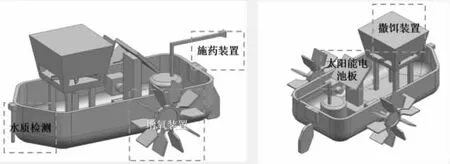
圖1 無人船總體結(jié)構(gòu)示意
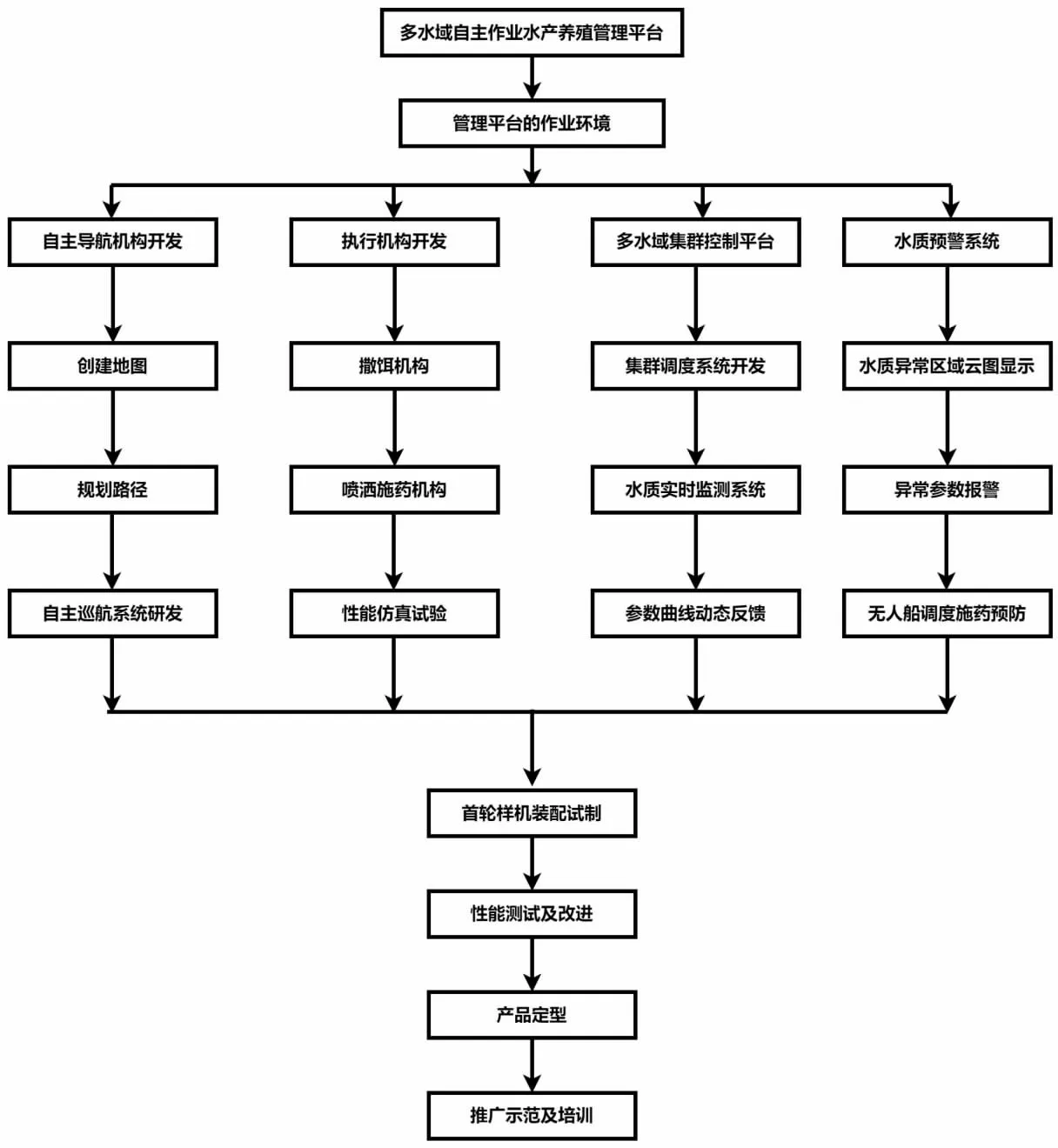
圖2 研發(fā)推廣技術(shù)路線
2 自動導(dǎo)航控制系統(tǒng)設(shè)計及模塊集成
2.1 無人船地面測控系統(tǒng)
基于“物聯(lián)網(wǎng)+大數(shù)據(jù)”技術(shù),開發(fā)蝦蟹水產(chǎn)養(yǎng)殖管控平臺,可在手機(jī)端或電腦端遠(yuǎn)程操控多條無人船進(jìn)行管理作業(yè),實(shí)現(xiàn)無人船的多水域集群調(diào)度,按時按需進(jìn)行大范圍航線規(guī)劃、自主巡航、精準(zhǔn)投餌、施藥以及航行數(shù)據(jù)實(shí)時監(jiān)測反饋。首先路徑規(guī)劃系統(tǒng)對蟹塘區(qū)域進(jìn)行路徑規(guī)劃,并將生成的目標(biāo)作業(yè)路徑下發(fā)給養(yǎng)殖船;接著養(yǎng)殖船上的APM主控制器通過GPS模塊、超聲波傳感器模塊獲取養(yǎng)殖船當(dāng)前的位置速度、航向、障礙物距離等信息,使用內(nèi)置的航向航速雙閉環(huán)控制算法進(jìn)行處理,根據(jù)處理的結(jié)果調(diào)用PWM 生成模塊和GPIO 輸出模塊,控制養(yǎng)殖船嚴(yán)格地按照設(shè)定的目標(biāo)路徑航行[7]。然后根據(jù)蝦蟹飼喂專家系統(tǒng)數(shù)據(jù)庫,給出蝦蟹飼養(yǎng)周期內(nèi)各單次投放量處方,養(yǎng)殖船自動地完成運(yùn)動控制功能和作業(yè)控制功能。無人船智能管控平臺控制流程如圖3 所示。
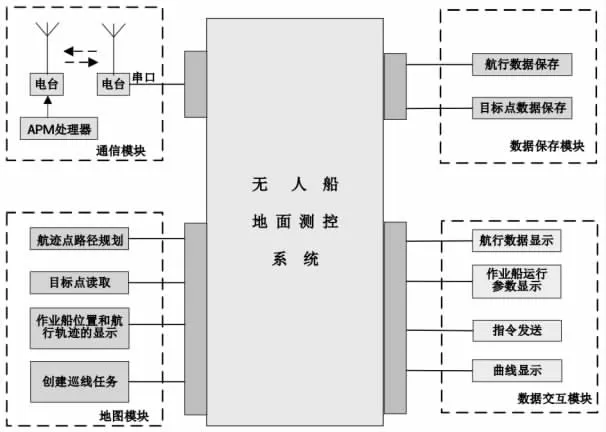
圖3 無人船智能管控平臺控制流程
2.2 航跡自主規(guī)劃與導(dǎo)航
在無人船智能管控平臺中創(chuàng)建巡航任務(wù),啟動任務(wù)之后就可以在地圖模塊看到無人船所在的水域位置,點(diǎn)擊添加水域的自主航線,航線的間距和大小都是前面我預(yù)先優(yōu)化測繪設(shè)置好的。點(diǎn)擊一鍵啟動無人船就能夠按照指定的規(guī)劃線路按照相應(yīng)的航行速度和航行方向進(jìn)行自主巡航。同時進(jìn)行投餌,水質(zhì)監(jiān)測等作業(yè)。當(dāng)所有航線運(yùn)行完畢之后無人船會回到我們的起點(diǎn)位置,整個作業(yè)過程可以實(shí)現(xiàn)自動化和無人化,大大提高養(yǎng)殖管理效率,降低人力成本。無人船規(guī)劃航線與自主巡航作業(yè)如圖4 所示。

圖4 無人船規(guī)劃航線與自主巡航作業(yè)
3 水質(zhì)實(shí)時監(jiān)測反饋
基于平臺開發(fā)遠(yuǎn)程監(jiān)測預(yù)警防治系統(tǒng),通過無人船上的水質(zhì)傳感器,實(shí)時監(jiān)測水質(zhì)參數(shù),對于監(jiān)測過程中參數(shù)異常的水域,在后臺地圖模塊直觀顯示并預(yù)警,同時調(diào)用對應(yīng)水域的無人船開展有針對性的施藥噴灑防治。本智能管控平臺可以同時對接多條水域監(jiān)測無人船,實(shí)施多水域集群化監(jiān)測作業(yè),為開展全自動水質(zhì)監(jiān)測技術(shù)設(shè)備的研發(fā)提供理論和實(shí)踐參考。
3.1 水質(zhì)數(shù)據(jù)實(shí)時監(jiān)測反饋
無人船上設(shè)計有水質(zhì)監(jiān)測裝置,水質(zhì)監(jiān)測儀自帶電池和檢測探頭,探頭伸入水體中測量當(dāng)前水域的水溫、溶氧量和PH 值,并通過無線網(wǎng)絡(luò)將測量結(jié)果實(shí)時傳輸至地面端,實(shí)時監(jiān)測反饋如圖5 所示。該水質(zhì)監(jiān)測系統(tǒng)具有方便部署、低功耗、無人操作、少維護(hù)、遠(yuǎn)距離傳輸?shù)忍攸c(diǎn)。能夠?qū)︷B(yǎng)殖水域水質(zhì)進(jìn)行實(shí)時監(jiān)測和調(diào)控,以實(shí)現(xiàn)增氧、投餌、施藥等功能的精準(zhǔn)化實(shí)施。
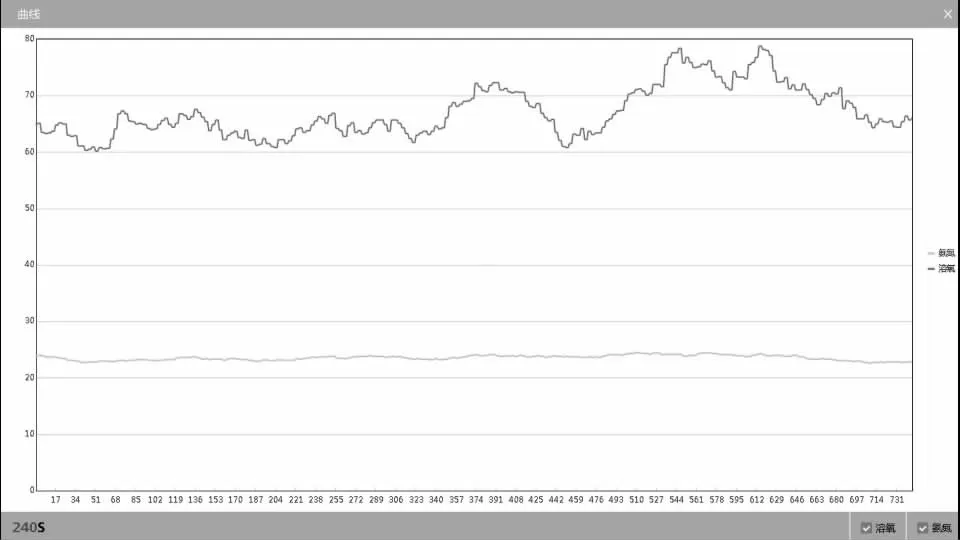
圖5 氨氮及溶氧量實(shí)時監(jiān)測數(shù)據(jù)反饋
3.2 歷史水質(zhì)數(shù)據(jù)參數(shù)對比
水質(zhì)檢測是評估養(yǎng)殖水體質(zhì)量和環(huán)境污染程度的重要手段。然而僅僅對水質(zhì)進(jìn)行實(shí)時的監(jiān)測并不足以提供完整的信息。對于大量的水質(zhì)檢測數(shù)據(jù),合理的數(shù)據(jù)處理和分析方法是必不可少的。管控平臺還可以調(diào)取水質(zhì)歷史數(shù)據(jù)進(jìn)行參數(shù)對比,如圖6 所示。對判斷養(yǎng)殖水域水質(zhì)情況提供豐富的數(shù)據(jù)參考。

圖6 平臺歷史水質(zhì)參數(shù)數(shù)據(jù)調(diào)取
3.3 水質(zhì)異常預(yù)警
平臺設(shè)置遠(yuǎn)程監(jiān)測預(yù)警防治系統(tǒng),通過無人船上的水質(zhì)傳感器,實(shí)時監(jiān)測水質(zhì)參數(shù),對于監(jiān)測過程中參數(shù)異常的水域,在后臺地圖模塊直觀顯示并預(yù)警,如圖7所示。同時調(diào)用對應(yīng)水域的無人船開展有針對性的施藥噴灑防治。
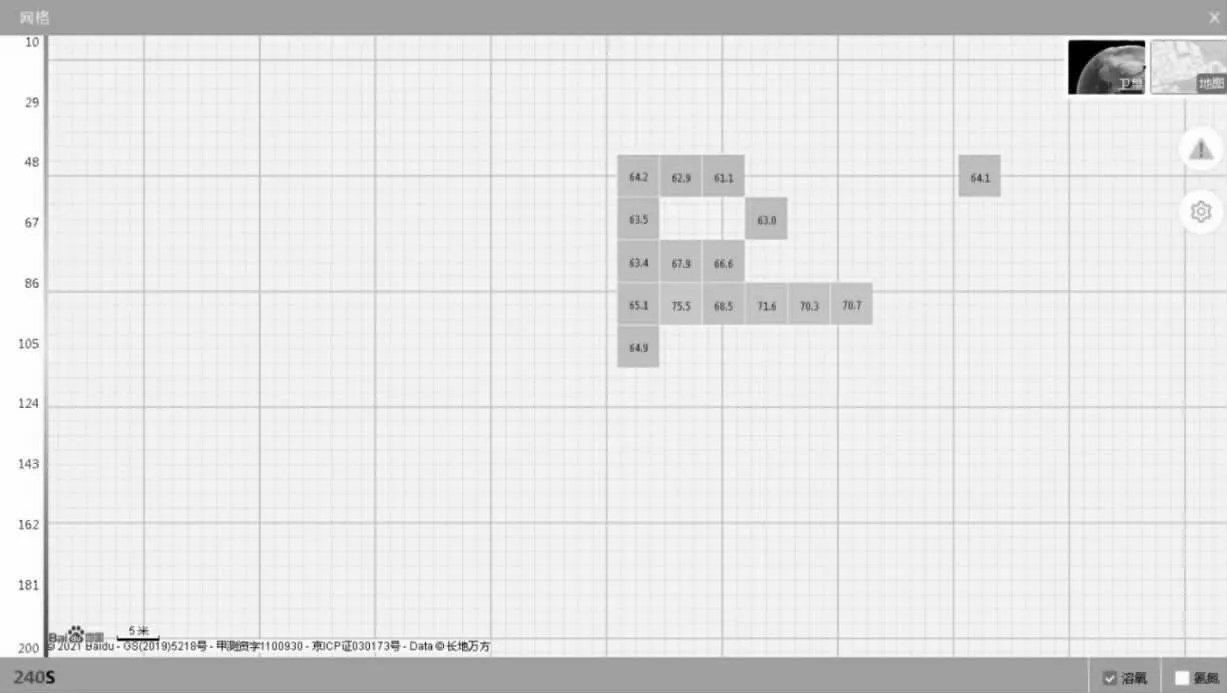
圖7 水質(zhì)異常水域云圖形式預(yù)警
4 試驗(yàn)推廣
在興化、句容等地開展示范應(yīng)用,示范應(yīng)用面積100 畝以上, 節(jié)省飼料20%,節(jié)本增效15%。有效提升蝦蟹養(yǎng)殖產(chǎn)業(yè)的效益。本無人駕駛蝦蟹投飼自主作業(yè)船及智能管控平臺適用于蝦蟹規(guī)模化養(yǎng)殖基地。通過使用無人駕駛投飼作業(yè)船與智能料倉可以節(jié)省飼料成本,提高蝦蟹產(chǎn)品品質(zhì)和提高養(yǎng)殖效益,有非常大的市場空間。
試驗(yàn)推廣過程中,無人駕駛蝦蟹投飼自主作業(yè)船及智能管控平臺,包括氣力輸送投飼機(jī)構(gòu)、水下噴氣式推進(jìn)機(jī)構(gòu)、作業(yè)船轉(zhuǎn)向機(jī)構(gòu)、作業(yè)船作業(yè)參數(shù)檢測模塊、作業(yè)船通訊模塊、作業(yè)船能量管理模塊等,實(shí)現(xiàn)按蝦蟹生長需求精準(zhǔn)飼喂,通過作業(yè)船與智能料倉的協(xié)同作業(yè),自動充電,自動添加飼料, 實(shí)現(xiàn)無人駕駛作業(yè)船按預(yù)設(shè)路徑自主行駛、轉(zhuǎn)向、投飼、充電等功能。水域試驗(yàn)驗(yàn)證的主要技術(shù)指標(biāo)為:
作業(yè)效率≥12.5 畝/h,連續(xù)服務(wù)能力≥50 畝,作業(yè)行走速度≥0.6 m/s,作業(yè)動力源為48 V 鋰電池,電源續(xù)航時間≥4 h,智能料倉容量≥1 T;船載料倉容量150 kg,投飼作業(yè)寬幅4 m,鋰電池充電時間≤4 h。推廣試驗(yàn)如圖8 所示。

圖8 無人駕駛蝦蟹投飼自主作業(yè)船及智能管控平臺水域試驗(yàn)推廣
5 結(jié)論
本無人駕駛蝦蟹投飼自主作業(yè)船及智能管控平臺可在每個水域控制一條自主導(dǎo)航水產(chǎn)養(yǎng)殖船,兼具智能補(bǔ)給、水塘施藥和水質(zhì)監(jiān)測功能,同時解決了大規(guī)模多水域集群作業(yè)的投餌、施藥、水質(zhì)監(jiān)測功能,可滿足擁有多片水域的大規(guī)模水產(chǎn)養(yǎng)殖戶的養(yǎng)殖作業(yè),使水產(chǎn)養(yǎng)殖裝備向著自動化、信息化、規(guī)模化、精確化方向發(fā)展,大幅降低人工成本,提高水產(chǎn)養(yǎng)殖效益,因此開發(fā)多水域自主作業(yè)水產(chǎn)養(yǎng)殖管控平臺有著廣闊的市場前景和開發(fā)潛力。
猜你喜歡
環(huán)境(2023年5期)2023-06-30 01:20:01
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代水產(chǎn)(2019年1期)2019-05-16 02:42:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
故事大王(2016年7期)2016-09-22 17:30:08
河南科技(2014年23期)2014-02-27 14:19:07
河南科技(2014年18期)2014-02-27 14:14:54