基于圓曲線最小通過寬度的無軌電車軌跡跟隨點(diǎn)選擇
2024-02-23 00:38:30石俊杰王鐵成季元進(jìn)黃有培
城市軌道交通研究 2024年1期
石俊杰 崔 濤 王鐵成 徐 練 季元進(jìn) 黃有培
(1. 中車唐山機(jī)車車輛有限公司, 063035, 唐山;2. 同濟(jì)大學(xué)鐵道與城市軌道交通研究院, 201804, 上海)
虛擬軌道列車是一種新型城市軌道交通系統(tǒng),具有公共路權(quán)、靈活編組、智能循跡等特點(diǎn)。與傳統(tǒng)道路公交相比,多模塊虛擬軌道列車大幅度增加了客運(yùn)量并降低了能源消耗。與有軌電車相比,虛擬軌道列車無需軌道,可充分利用現(xiàn)有道路基礎(chǔ)設(shè)施,因此可降低建設(shè)成本[1]。
目前,對于虛擬軌道列車的軌跡跟隨控制研究,均為通過控制車輛后軸跟隨點(diǎn)對前車跟隨點(diǎn)的軌跡跟隨,以實(shí)現(xiàn)減小車輛曲線通過時(shí)的通過寬度[2-5],并沒有考慮車輛跟隨點(diǎn)選擇方式,一般都默認(rèn)車輛車軸所在點(diǎn)或者車輛鉸接點(diǎn)所在位置為跟隨點(diǎn)。文獻(xiàn)[6]討論選擇不同跟隨點(diǎn)時(shí)車輛的軌跡偏差表達(dá)式,對比分析頭車前軸、頭車后軸、前軸與后軸之間、鉸接點(diǎn)4種不同跟蹤點(diǎn)方案。研究表明:當(dāng)跟隨點(diǎn)在前軸中心到后軸中心之間時(shí),列車軌跡偏差相同;當(dāng)跟隨點(diǎn)為鉸接點(diǎn)時(shí),由于鉸接點(diǎn)在頭車后軸中心點(diǎn)之后,因此列車軌跡偏差變大。本文基于某型三模塊六軸虛擬軌道列車,分析車輛曲線通過的最小通過寬度對軌跡跟隨點(diǎn)選擇的影響,為跟隨點(diǎn)位置選擇提供了依據(jù)。
1 車輛通過寬度
傳統(tǒng)列車轉(zhuǎn)彎通過寬度是指牽引車最外端一點(diǎn)到轉(zhuǎn)向中心的距離與最后一節(jié)掛車最內(nèi)側(cè)外沿到轉(zhuǎn)向中心最短距離之差,因此主要取決于牽引車和掛車的結(jié)構(gòu)形式與幾何尺寸。轉(zhuǎn)彎通過寬度是列車機(jī)動性的重要指標(biāo)之一,而對于三節(jié)編組六軸無軌電車的全軸轉(zhuǎn)向形式,可按照單車情況考慮。
1.1 圓曲線
以列車中車體最長的車輛為例進(jìn)行分析。如圖1所示,根據(jù)幾何分析容易證明,當(dāng)車輛相對于線路坐標(biāo)系的搖頭角為0°時(shí),車體的內(nèi)、外偏距最小,車輛的通過寬度最小。按照幾何關(guān)系可以得到目標(biāo)軌跡左右側(cè)偏差量和車輛通過寬度的解析表達(dá)式。考慮到實(shí)際運(yùn)營情況,根據(jù)車體左右偏差量來合理布置線路中心標(biāo)志(如車道線、磁釘),可以使得車輛通過寬度得以有效利用。分情況進(jìn)行討論。
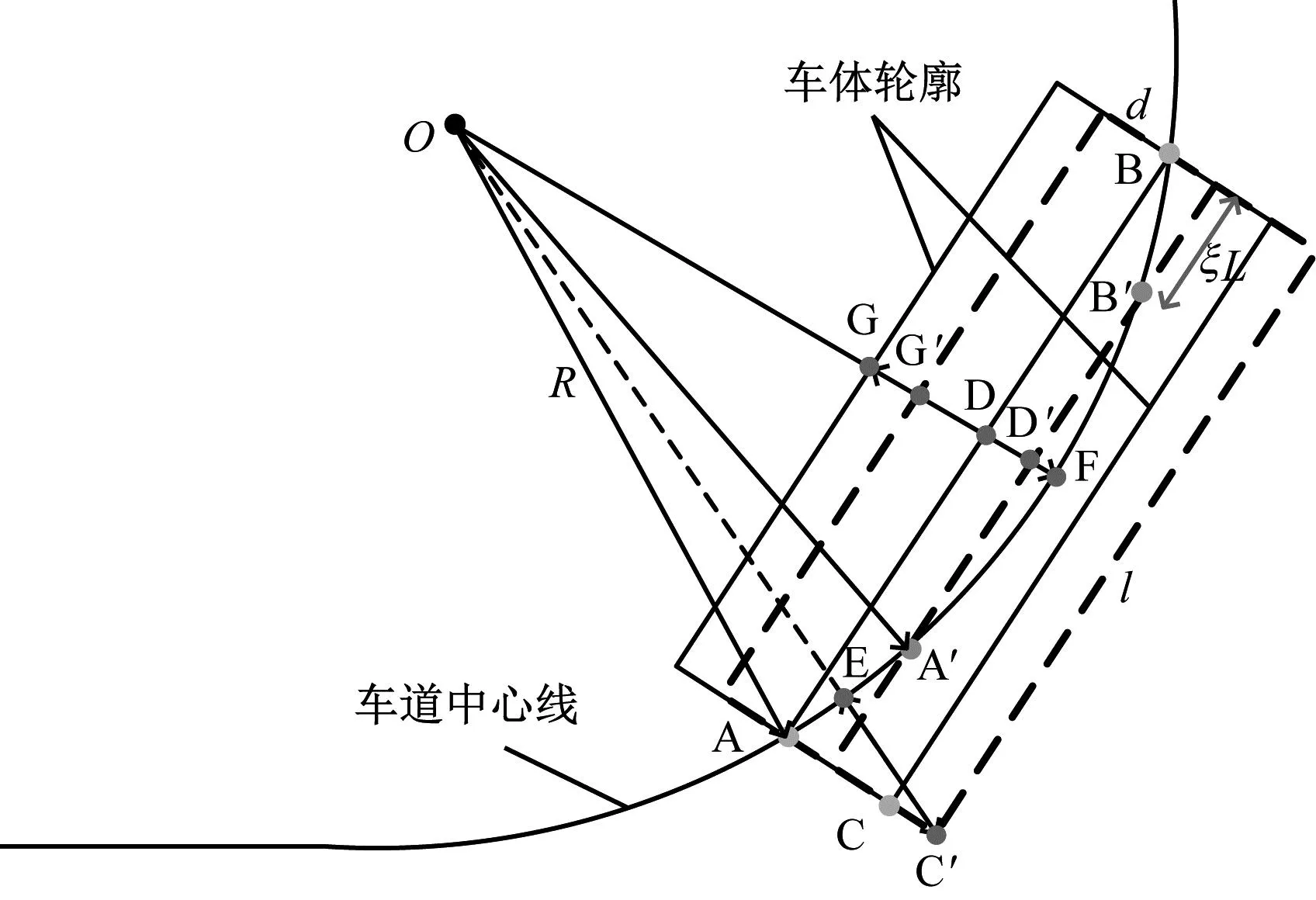
注:w—車體寬度; L—車體長度; ξ—循跡控制點(diǎn)到車體端部占車輛長度的比值; R—曲線半徑。
1) 當(dāng)期待線路標(biāo)志布置在線路中心,且希望車輛軌跡的左右側(cè)偏差量保持一致時(shí)。依據(jù)圖1幾何關(guān)系可知,軌跡左右側(cè)偏差量為dLR=lC′E-lG′F(lC′E為車輛最外端一點(diǎn)到線路中心線距離,lG′F為車輛最內(nèi)沿到線路中心線距離),即:

(1)
為保證軌跡左右側(cè)偏差量相等,令dLR=0,得到:
(2)
參考無軌電車車輛參數(shù):w為2.5 m,L為6.66 m,R選擇范圍為15~55 m;車體長度變化范圍為5.5~7.5 m,車體寬度變化范圍為2.0~3.0 m。計(jì)算不同圓曲線半徑下L、w與ξ的關(guān)系,結(jié)果如圖2所示。左右側(cè)偏差量相等條件下,L、w的變化對ξ的影響較小;隨著曲線半徑的增大ξ逐漸減小,但ξ都在0.16左右。
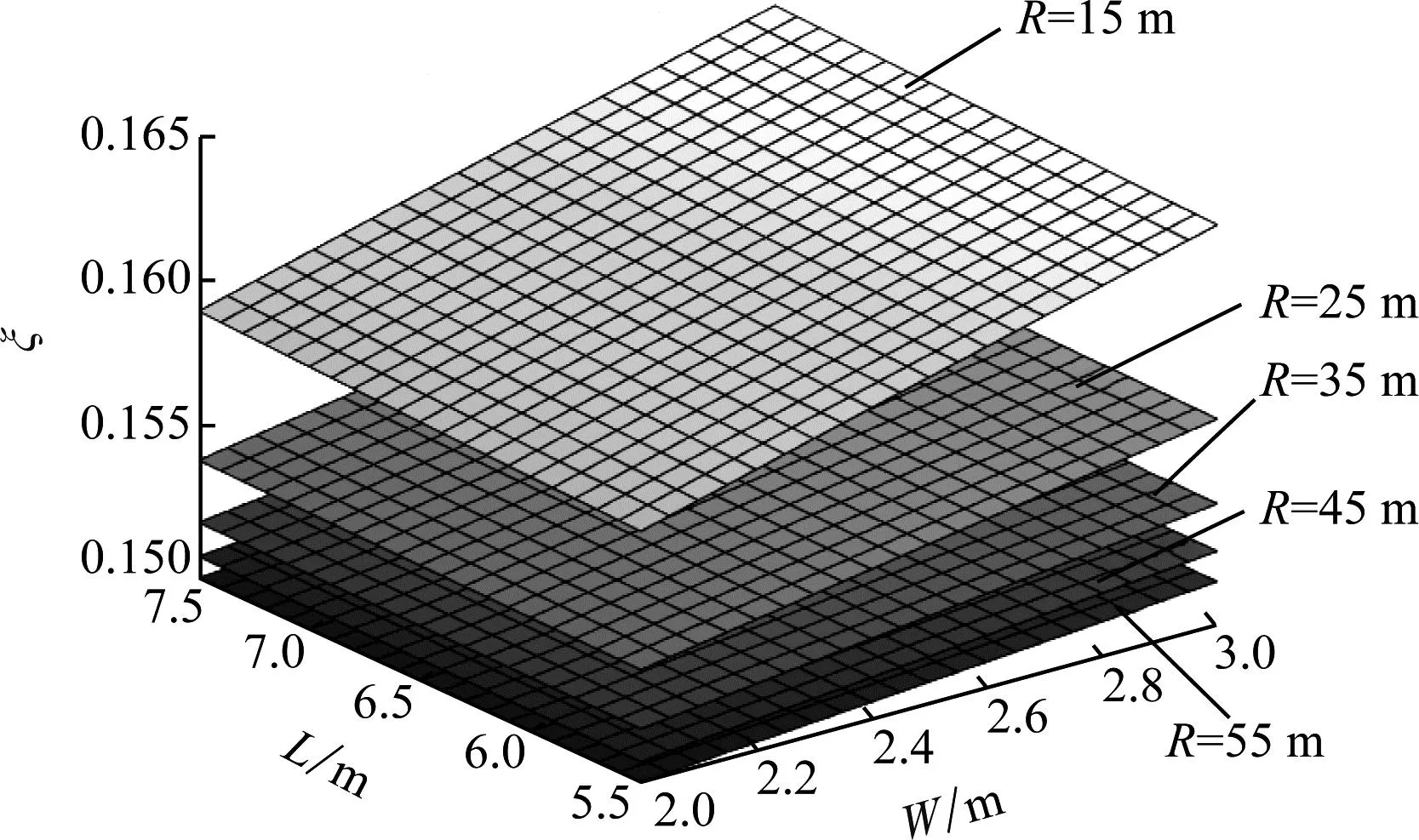
圖2 不同圓曲線半徑下車輛L、w與ξ的關(guān)系
2) 當(dāng)需要盡可能減小車輛通過所占面積時(shí),依據(jù)圖1幾何關(guān)系可知,通道寬度Wtd的表達(dá)式為:

(3)
式中:
為保證車輛通過寬度最小,令?Wtd/?ξ=0,得到ξ=0.5。
參考無軌電車車輛參數(shù),不同ξ與Wtd的關(guān)系如圖3所示。由圖3可見,按照軌跡左右偏差量最小得到的Wtd并非最小。
圖3 不同ξ與Wtd的關(guān)系(R=15 m)
1.2 過渡曲線
對于車輛通過過渡曲線情況,給定一個(gè)單參數(shù)曲線簇:
F(x,y,s)=0
(4)
式中:
x、y——橫、縱坐標(biāo)值;
s——軌道參數(shù);
F——連續(xù)可微函數(shù)。
曲線簇的包絡(luò)線是跟該曲線族的每條線都有至少一點(diǎn)相切的一條曲線。
依據(jù)包絡(luò)線的定義,車體的包絡(luò)線包含在以下兩個(gè)方程中:
(5)
式中:
i——車體所在位置;

車輛輪廓掃過的邊界是車輛端點(diǎn)軌跡、車輛包絡(luò)線和車體外形這三部分的組合,如圖4所示。外側(cè)粗線分別為車體尾部頂點(diǎn)形成的輪廓、車體前端頂點(diǎn)形成的輪廓及車體左側(cè)墻和右側(cè)墻形成的包絡(luò)線,虛線為車體的外形。車輛通過過渡曲線掃過的邊界可表示為:
注:state為車輛運(yùn)行狀態(tài)。
Fboundary(si)=max(Fvertex,Fenvelope(si),Fcarbody(si))
(6)
式中:
Fboundary——車輛動態(tài)邊界;
Fvertex——車輛頂點(diǎn)形成的輪廓;
Fcarbody——車輛前開始和終點(diǎn)車體外形;
Fenvelope——車輛的包絡(luò)線。
車輛通過寬度是車輛輪廓移動過程中掃過范圍邊緣和軌道前進(jìn)方向之間的法向距離,此時(shí)將公式(6)所得到的輪廓邊界按照軌道方向展開,求解車輛通過寬度,如圖5所示。車輛通過寬度Wtg表達(dá)式為:
圖5 車輛通過過渡曲線的通道寬度
(7)
式中:
di——軌跡右側(cè)偏移量;
2 列車幾何通過模型
三模塊無軌電車的結(jié)構(gòu)示意圖如圖6所示,其中,J1、J2為車體間鉸接點(diǎn),J0、J3表示頭車和尾車的虛擬循跡點(diǎn)(與鉸接點(diǎn)J1、J2以頭車和尾車的車體中心相對稱),P0—P3為確保車體左右側(cè)的偏差量相等條件下的比例系數(shù)對應(yīng)(此處控制點(diǎn)到車體端部長度占車輛長度的比值取為0.16)的跟隨點(diǎn)。
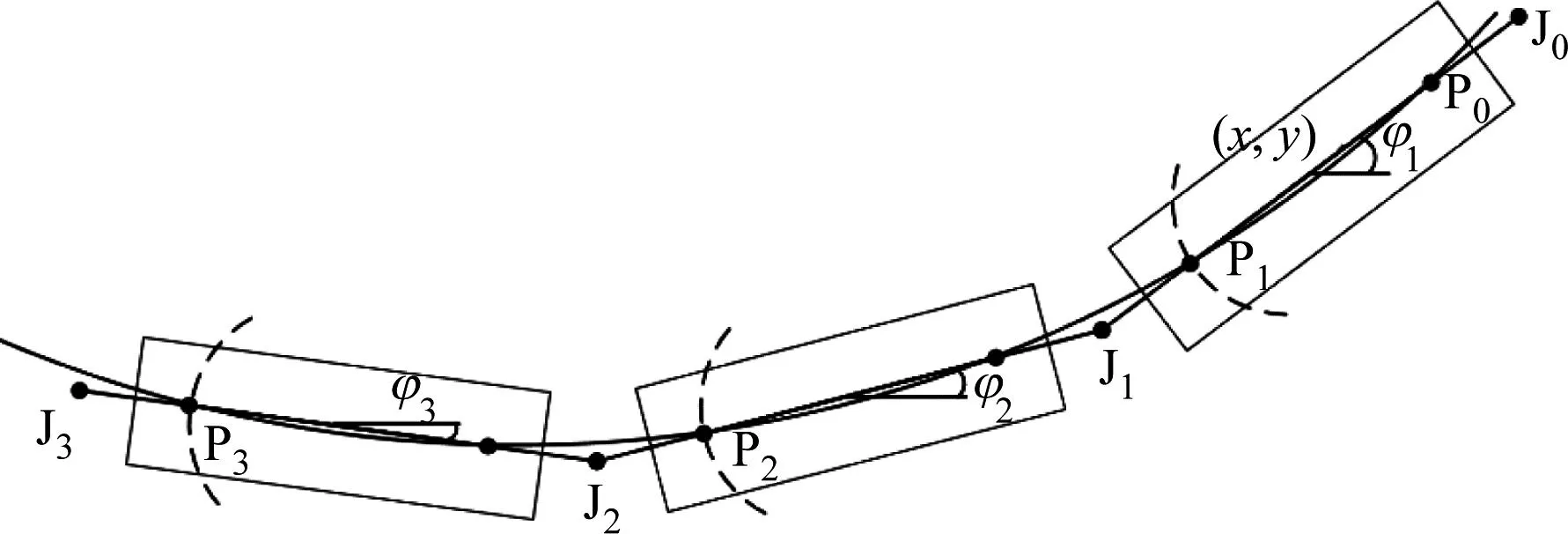
注:φj—車體j的航向角,j=1,2,3。
目標(biāo)軌跡方程為:
(8)
式中:
l——車輛在目標(biāo)軌跡路徑上運(yùn)行距離;
λtarget(l)——目標(biāo)軌跡。
車輛的運(yùn)行狀態(tài)為:
qk=[xikyikφ1kφ2kφ3k]T
(9)
式中:
qk——k時(shí)刻車輛運(yùn)行狀態(tài);
(xik,yik)——k時(shí)刻對應(yīng)車體在i位置的橫坐標(biāo)及縱坐標(biāo)值;
φ1k、φ2k、φ3k——k時(shí)刻第1、第2和第3節(jié)車的航向角,逆時(shí)針為正。
依據(jù)幾何關(guān)系求解列車位置過程步驟為:
1) 按照車輛運(yùn)行速度,得到第一跟隨點(diǎn)對應(yīng)的坐標(biāo)(xP0(sk),yP0(sk));
2) 以第二控制點(diǎn)P1與第一控制點(diǎn)的距離為半徑,以第一控制點(diǎn)為圓點(diǎn)與目標(biāo)軌跡的交點(diǎn)確定第二控制點(diǎn)坐標(biāo)(xP1(sk),yP1(sk));
3) 依據(jù)第一控制點(diǎn)與第二控制點(diǎn)的坐標(biāo)得到車輛的偏航角φ1k=arctan((yP0k-yP1k)/(xP0k-xP1k)),進(jìn)而求得鉸接點(diǎn)坐標(biāo)(xJ1,yJ1);
4) 重復(fù)步驟2)、步驟3),得到車體φ2k和φ3k,以及P2、J2、P3、J3點(diǎn)的坐標(biāo)。
3 仿真分析
依據(jù)表1無軌電車車輛幾何參數(shù),參考列車幾何模型,設(shè)置4種典型循跡控制跟隨點(diǎn)工況:
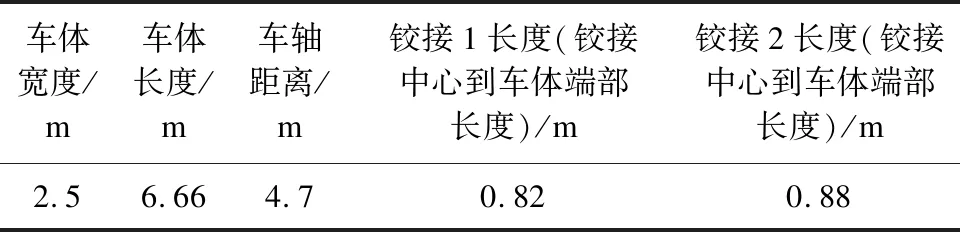
表1 無軌電車車輛幾何參數(shù)
工況1:跟隨點(diǎn)選為ξ=0.16;
工況2:跟隨點(diǎn)選為第1節(jié)車的車體端點(diǎn)+鉸接點(diǎn);
工況3:跟隨點(diǎn)選為車體端點(diǎn):
工況4:跟隨點(diǎn)選為鉸接點(diǎn)+頭車虛擬鉸接點(diǎn)(圖6中J0點(diǎn))。
參照列車幾何模型,4種工況下列車由直線進(jìn)入R=20 m圓曲線的通過寬度Wtg的仿真結(jié)果如圖7所示。表2給出R分別為20 m、40 m、60 m下通過寬度的穩(wěn)態(tài)值和最大值計(jì)算結(jié)果。依據(jù)圖7及表2可知,當(dāng)跟隨點(diǎn)對稱且位于車輛的鉸接點(diǎn)處(如工況4),車輛的最大通過寬度最小。當(dāng)按照工況1和工況3設(shè)置跟隨點(diǎn)時(shí),車輛穩(wěn)態(tài)通過寬度最小。
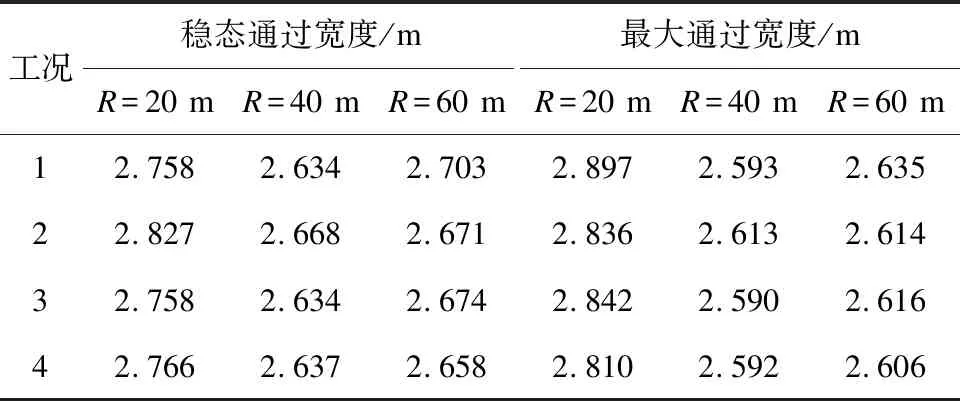
表2 車輛通過不同曲線半徑圓曲線通過寬度計(jì)算結(jié)果
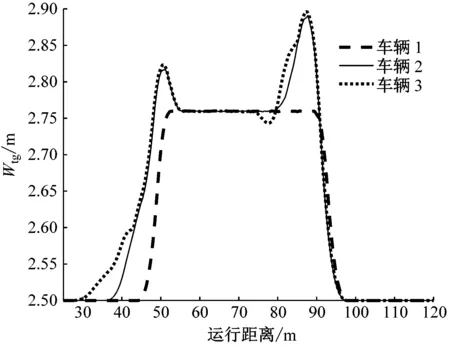
a) 工況1
4 結(jié)語
本文推導(dǎo)了穩(wěn)態(tài)圓曲線車輛的軌跡左右側(cè)的偏差量和通過寬度計(jì)算公式,仿真計(jì)算結(jié)果表明:隨著曲線半徑的增大,最優(yōu)循跡跟隨點(diǎn)到車體端部位置占車輛長度的比值逐漸減小,但比值都在0.16左右;車輛需滿足一定位姿條件,即車輛中心線與軌跡半徑垂直相交于中心線中點(diǎn),方能使車輛的通過寬度最小。本文也分析了車輛在不同軌跡跟隨點(diǎn)組合工況下的車輛通過寬度指標(biāo),當(dāng)車輛的跟隨點(diǎn)對稱且位于車輛的鉸接點(diǎn)處,車輛的通過寬度綜合指標(biāo)最優(yōu)。因此,軌跡跟隨點(diǎn)應(yīng)盡可能選擇在車輛的鉸接點(diǎn),使得車輛能以最優(yōu)的通過寬度通過曲線。