北京地鐵首都機場線車輛緊急制動安全監控裝置的設計及驗證
2024-02-23 00:38:52徐恭德馬法運
城市軌道交通研究 2024年1期
徐恭德 劉 澳 蓋 猛 馬法運 苗 峰 崔 雷
(中車青島四方車輛研究所有限公司, 266031, 青島)
北京地鐵首都機場線(以下簡稱“機場線”)采用地下線、地面線和高架線相結合的方式,具有線路坡度大,平面曲線半徑小的特點。為適應機場線的線路特征和運營需求,選擇了爬坡能力強、轉彎半徑小、噪聲小的直線電機驅動車輛作為運營車輛[1-2]。
在城市軌道交通中,直線電機驅動的車輛占比少[3]。與傳統軌道交通車輛相比,其牽引和制動過程不受輪軌黏著力的限制,具備更強的牽引和電制動能力。文獻[4]將緊急制動分為多種模式,然后將直線電機的電制動用于其中一種緊急制動模式。該方案將電制動有效指令串入車輛電氣控制回路,雖然實現了緊急制動過程的電-空氣配合功能,但缺乏對整列列車的緊急制動性能評估,不能精確計算整列的電制動和空氣制動的切換條件,沒有充分利用整列列車的電制動能力。
為減小緊急制動過程中的摩擦副磨耗,并充分利用直線電機的電制動能力,機場線的車輛設置了緊急制動安全監控裝置(以下簡稱“安全監控裝置”)。安全監控裝置采用兩級緊急制動控制模式:行車過程中,當信號系統或司機觸發緊急制動指令時,安全監控裝置首先采用Ⅰ級緊急制動控制模式,并實時監控緊急制動性能;若Ⅰ級緊急制動控制模式的制動性能不能滿足要求,則切換為Ⅱ級緊急制動控制模式,以確保制動安全。
1 控制原理
安全監控裝置采用安全運算平臺[5],并由列車低壓供電母線直接供電。安全監控裝置設置了安全數字量采集通道,采集EB(列車緊急制動)指令信號和EBS(子系統緊急制動)指令信號;設置4路速度傳感器采集通道,冗余采集2個車軸的4路速度脈沖信號,計算車輛緊急制動時的運行狀態;設置EBS輸出通道,向車輛的牽引系統和制動系統發送EBS信號;設置BRS(制動釋放信號)輸出通道,通過硬線向TCMS(車輛控制管理系統)發送安全監控裝置的控制狀態,指示安全監控裝置的緊急制動控制模式等級;設置BFS(制動故障信號)輸出通道,通過硬線向TCMS發送運行狀態信息,指示安全監控裝置的運行狀態是否正常。安全監控裝置的接口如圖1所示。
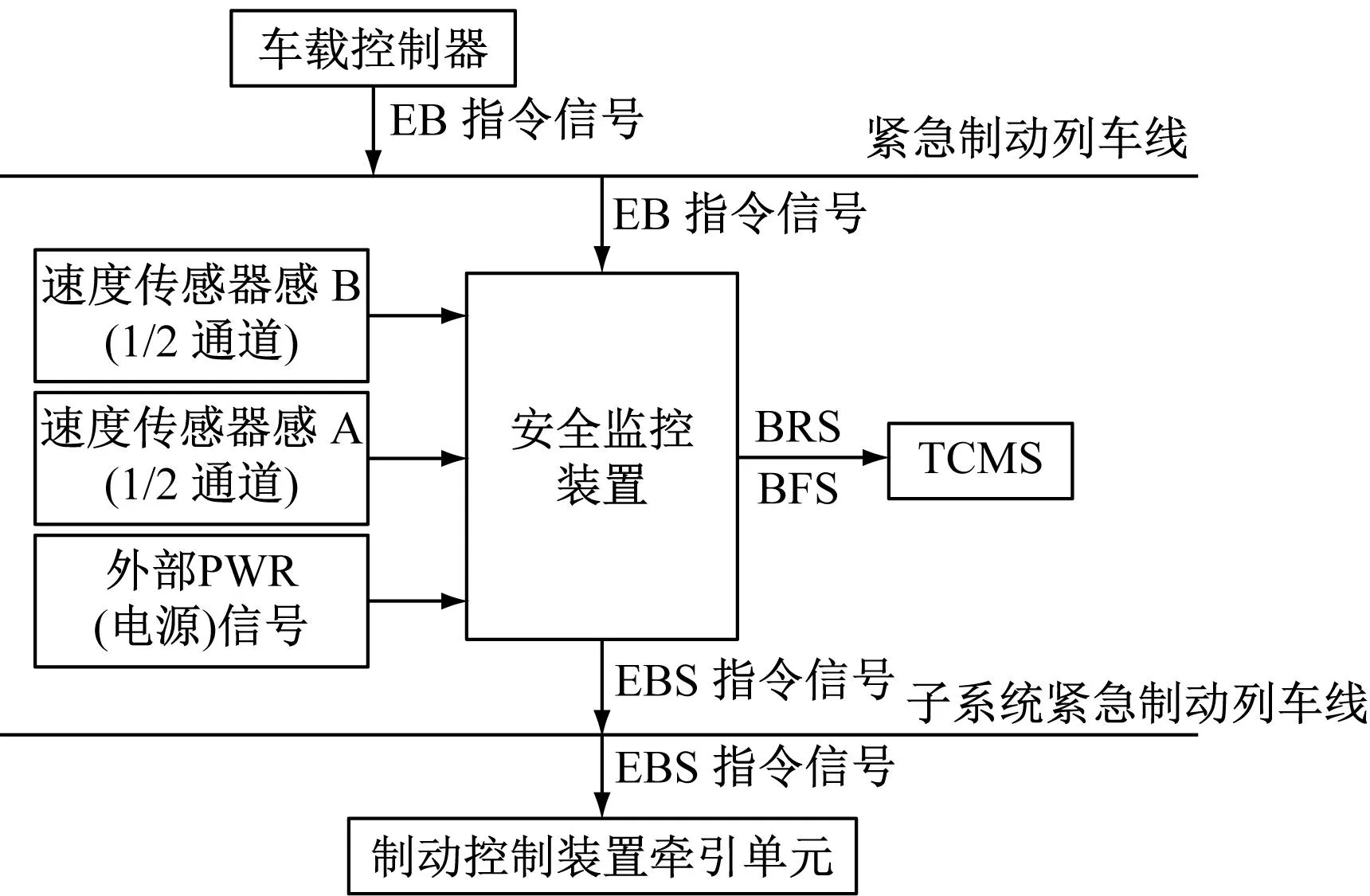
圖1 安全監控裝置接口
安全監控裝置通過控制安全繼電器的動作來實現切換緊急制動控制模式的等級。當車輛未緊急制動時,安全監控裝置控制安全繼電器Relay1失電,并通過Relay1的常閉觸點使EBS輸出通道與EB輸入通道等電位連接,以保證EB指令和EBS指令的信號狀態均為高電平。當車輛緊急制動時,安全監控裝置控制安全繼電器Relay1得電,并通過Relay1的常開觸點使EBS輸出通道連接至車輛低壓控制母線PWR+(電源供電正極),保證EB信號為低高電平,EBS信號為高電平,控制安全監控裝置進入Ⅰ級緊急制動控制模式。在Ⅰ級緊急制動控制模式期間,安全監控裝置實時監控緊急制動性能;當車輛的緊急制動性能不滿足要求時,安全監控裝置控制安全繼電器Relay1失電,通過安全繼電器Relay1的常閉觸點使EBS輸出通道與EB輸入通道恢復等電位連接,保證EB指令和EBS指令信號均為低電平,控制安全監控裝置進入Ⅱ級緊急制動控制模式。安全監控裝置緊急制動控制模式切換電路圖如圖2所示。
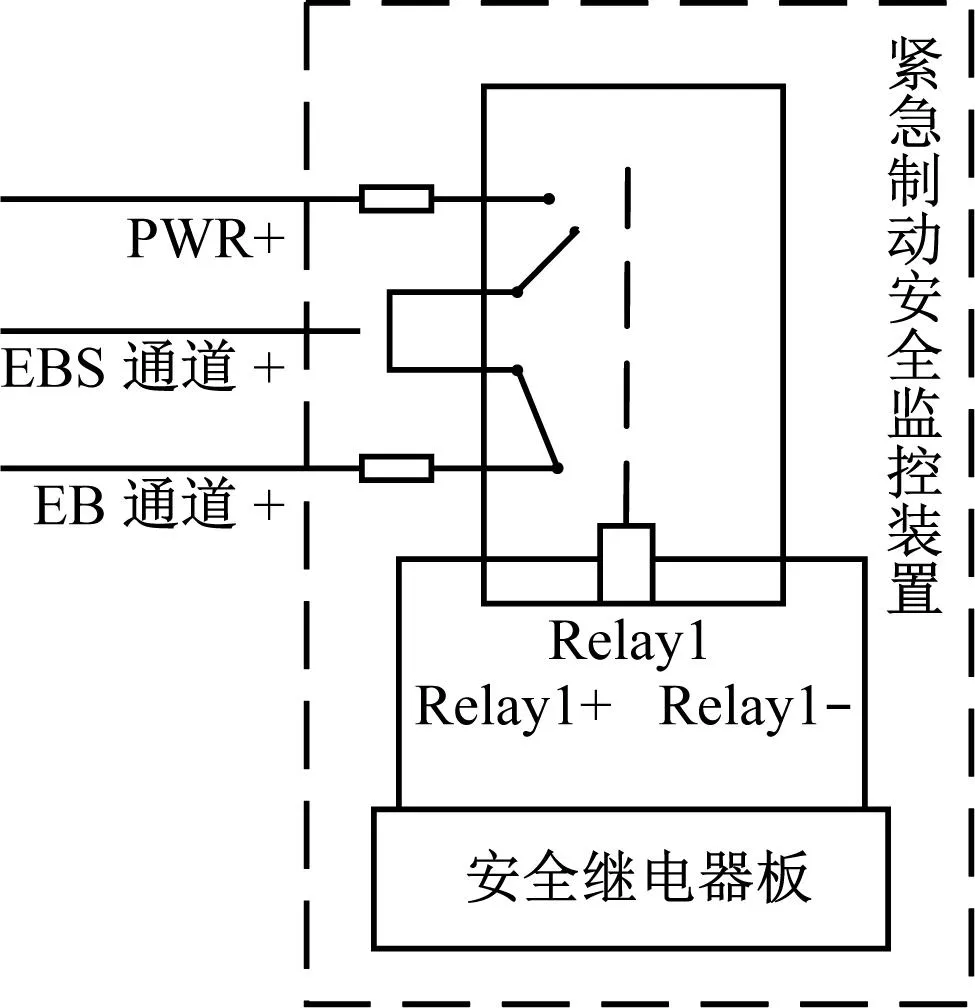
注:+為正極;-為負極。
Ⅰ級緊急制動控制模式是一種自恢復的、非安全的緊急模式。當車輛處于Ⅰ級緊急制動控制模式時,安全監控裝置控制牽引系統施加電制動,控制制動系統施加磁軌制動。Ⅱ級緊急制動控制模式是一種不可恢復的、安全的制動控制模式。當Ⅰ級緊急制動控制模式下的制動性能不能滿足制動要求,或者車輛速度已將至足夠低時,安全監控裝置切換至Ⅱ級緊急制動控制模式,控制制動系統施加液壓摩擦制動及磁軌制動,并保持此模式至停車。
2 功能設計
在緊急制動過程中,為確保制動性能,安全監控裝置實時計算Ⅰ級緊急制動控制模式與Ⅱ級緊急制動控制模式切換的制動性能臨界狀態,并將其作為判據;監測車輛的實際制動狀態,并將判據與實際狀態進行對比,進而判斷出緊急制動的施加等級,控制緊急制動的兩級切換。
因此,安全監控裝置的功能設計主要包括:① 計算Ⅰ級緊急制動控制模式下的制動性能判據;② 監測車輛實際制動狀態;③ 判斷Ⅰ級緊急制動控制模式性能。
2.1 Ⅰ級緊急制動控制模式的制動性能判據計算
由于瞬時加速度表征車輛當前狀態的緊急制動性能,制動距離表征車輛從緊急制動開始至當前階段的緊急制動性能,因此安全監控裝置采用瞬時加速度和制動距離雙重指標作為Ⅰ級緊急制動控制模式下制動性能的判據。這樣,一方面,能夠及時判斷當前工況的緊急制動性能是否不足,另一方面,在瞬時加速度滿足要求但制動距離超標的極端特殊情況下,也能夠保證制動距離的安全性。
Ⅰ級緊急制動控制模式下,車輛制動采用電制動和磁軌制動相結合的方式。電制動通過直線電機與軌道鋁板之間的電磁作用產生制動力;磁軌制動通過車下的磁軌制動器吸附在鋼軌上,產生滑動摩擦制動力。二者制動力的施加相互獨立且不受輪軌黏著的限制,所以疊加兩者的緊急制動性能曲線即可計算出Ⅰ級緊急制動控制模式的制動性能曲線。Ⅰ級緊急制動控制模式下瞬時制動加速度的制動性能曲線如圖3所示。
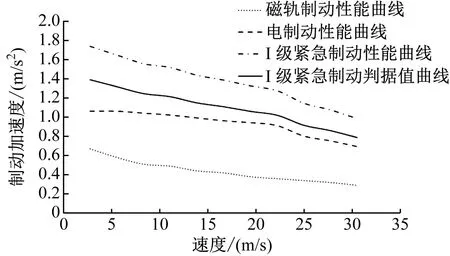
圖3 Ⅰ級緊急制動控制模式下瞬時制動加速度的
根據圖3,通過線性擬合的方法可得,Ⅰ級緊急制動控制模式下的速度與制動加速度線性關系為:
aL=-mv+n
(1)
式中:
aL——Ⅰ級緊急制動控制模式瞬時制動加速度理論值;
m——線性擬合方程的系數;
n——線性擬合方程的常數;
v——速度。
結合以下因素,暫定aL判據的容忍系數:
1) 在安全停車原則基礎上盡量降低擦輪風險;
2) 在信號系統控制車輛時,車輛制動加速度應≥0.85 m/s2。
取制動加速度指標aJ=0.8aL作為Ⅰ級緊急制動控制模式下切換Ⅱ級緊急制動控制模式的實時判據。結合加速度的定義和式(1),可得:
(2)
式中:
aJ——Ⅰ級緊急制動控制模式瞬時制動加速度判據值;
t——緊急制動的時間。
求解式(2),可得:
(3)
式中:
C——微分方程解中的常數。
最后,通過對v積分即可求得,Ⅰ級緊急制動控制模式下作為切換緊急制動控制模式等級另一判據的制動距離SJ同v的關系:
(4)
2.2 車輛實際制動狀態監測
安全監控裝置通過計算每個周期內采集的脈沖數和對應的時間間隔,求出當前周期內的v。為提升v采集的準確性和可靠性,安全監控裝置設置了4路速度采集通道,其中Axle1、 Axle2兩個車軸的速度傳感器分別有2路速度信號。通過橫向對比,可以判斷各軸采集的速度是否正常。Axle1、 Axle2兩軸的速度信號相互冗余,當某軸的一路速度采集失效時,安全監控裝置仍能通過另一路獲取速度信號。為提升速度信號的穩定性,安全監控裝置先通過軟件對采集到的速度信號進行濾波處理。濾波算法為:
(5)
式中:
vg——第g路速度信號濾波后的速度值,g=1,2,3,4;
e——濾波緩存區總個數;
vgi——第i個采集周期內第g路通道采集的速度值;其中,i=1,2,…,e;
k——速度有效加權因數;濾波堆棧中的速度最大值和最小值的有效加權因數為零,其余加權因數為1。
在計算出vg后,安全監控裝置按照制動速度取大的策略橫向比較各路vg,最終計算出代表車輛速度的唯一有效速度vc。
安全監控裝置根據4路速度信號的變化量及對應的處理周期計算4路加速度,然后采用與速度濾波相同的方式對加速度濾波。安全監控裝置對各路濾波后的加速度取值,最終計算出車輛的唯一有效加速度。安全監控裝置的加速度取值策略為:
(6)
式中:
ac——車輛唯一有效加速度;
aGi——第i個采集周期內第G路加速度的濾波值,G=1,2,3,4。
當安全監控裝置采用Ⅰ級緊急制動控制模式后,開始計時,經過制動的響應時間后,對v積分,計算車輛的實際緊急制動距離S,即:
S=sum(vcTc)
(7)
式中:
S——車輛實際的制動距離;
Tc——vc對應的采集周期。
2.3 性能判斷
在Ⅰ級緊急制動控制模式階段,安全監控裝置實時計算Ⅰ級緊急制動控制模式的制動性能判據指標,監測車輛的實際制動狀態,并在數據判斷緩存區內滑動比較兩者數據。安全監控裝置設置數據比較容忍界限,當S或者當前實際制動加速度a不滿足模式切換要求時,相關標志位置位,并開始記錄次數;當標志位的計數超過容忍界限后,安全監控裝置控制安全繼電器釋放,EB指令和EBS指令的信號狀態均保持低電平,緊急制動控制模式等級由Ⅰ級切換為Ⅱ級,至車輛完全停止。
3 試驗驗證
為了檢驗安全監控裝置設計的正確性,也為了驗證安全監控裝置與車輛制動控制過程的適配性,在AW3(滿載)工況下進行車輛緊急制動性能試驗。
3.1 試驗一
試驗一中,先將車輛加速至40 km/h速度等級,在最大牽引位時,施加緊急制動,裝置在車輛高速段時保持Ⅰ級緊急制動控制模式,不切換;當速度降至低速段時,裝置切換至Ⅱ級緊急制動控制模式。試驗一的安全監控裝置控制過程曲線見圖4。

圖4 試驗一的安全監控裝置制動過程曲線
安全監控裝置在速度達到A點時,接受到緊急制動指令,經過Δt1(150 ms)延時后,進入Ⅰ級緊急制動控制模式。當車輛速度達到峰值B點后開始減速。安全監控裝置在C點開始計算aJ。在D點時開始計算S和SJ。當速度降至E點以下時,安全監控裝置控制安全繼電器失電,牽引系統退出電制動,制動系統補償液壓制動。圖4中Ar2區域表明在車輛低速段時,緊急制動控制模式的切換導致車輛制動加速度抖動,完成緊急制動控制模式由Ⅰ級切換至Ⅱ級,并保持Ⅱ級緊急制動控制模式至停車(F點)。整個過程中,aJ曲線與a曲線的輪廓和趨勢一致,驗證了推導過程的合理性、準確性。
Experiment 1
在Ⅰ級緊急制動過程中,aJ的平均值為1.26 m/s2;在監控制動距離期間(DE段),SJ=56.4 m,D點的速度為12.05 m/s,E點的速度為1.44 m/s, 由監控制動距離推導出監控過程的平均制動加速度為1.27 m/s2監測的實際制動距離S為48.4 m;兩平均制動加速度均滿足信號系統對安全監控裝置控制制動加速度的要求(≥0.85 m/s2),并且滿足標準規范對地鐵車輛緊急制動加速度的要求(1.0~2.5 m/s2)[6],驗證了計算的安全性。
3.2 試驗二
試驗二中,先將車輛加速至40 km/h速度等級;在最大牽引位時,施加緊急制動;在車輛高速段時,由于制動性能不滿足判據要求,安全監控裝置切換進入Ⅱ級緊急制動控制模式。試驗二的安全監控裝置制動控制過程曲線如圖5所示。

圖5 試驗二的安全監控裝置制動過程曲線
當安全監控裝置采用Ⅰ級緊急制動控制模式后,由于隔離了部分牽引控制裝置,列車的電制動能力降低,導致a偏小,在制動力上升過程中(CD時間區段的Ar3區域),多次出現a 在整個制動過程中,S=45.4 m,略小于SJ(45.7 m);a平均值為1.29 m/s2,aJ的平均值為1.27 m/s2;在監控S期間(DE段),D點的速度為10.94 m/s,E點的速度為1.43 m/s,由S推導出監控過程的平均制動加速度為1.29 m/s2,實際制動加速度略大于aJ,說明車輛的實際緊急制動性能與相應指標判據值基本一致。 由試驗結果可見,安全監控裝置的監測和兩級緊急制動控制模式的切換,保證了車輛的緊急制動性能。這驗證了安全監控裝置設計的正確性和有效性,也驗證了安全監控裝置與車輛制動控制過程的適配性。 基于機場線車輛的緊急制動需求,本文從其控制方法出發闡述了該裝置兩級緊急制動控制模式的切換方法。該裝置在充分利用整列列車電制動性能的基礎上,能降低摩擦制動損耗,保證車輛的制動性能和安全性。經過現場試驗驗證,該裝置計算準確,動作可靠,其制動控制過程符合實際工程規律,可為車輛緊急制動控制的后續研究提供借鑒。3.3 驗證結果
4 結語
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52