一種半自動化聯系測量方法的應用
2024-02-23 06:06:24范朋飛
鐵道勘察 2024年1期
范朋飛
(中國鐵路設計集團有限公司,天津 300251)
引言
在城市軌道交通工程建設過程中,聯系測量作為指導施工的一道重要環節[1],始終發揮著極為重要的作用[2-3]。通過聯系測量可以建立地面控制點與地下控制點的對應關系,獲取地下控制點坐標及控制邊方位角[4],從而實現地下工程嚴格按照設計位置施工的目的[5]。已有許多學者開展相關研究,許鋒等在使用全站儀、鋼絲、鉛錘等常規儀器設備情況下,僅通過對多根鋼絲進行多次觀測便可實現坐標傳遞,獲得井下控制點坐標及方位角,指導隧道施工,適用于特殊結構和復雜現場環境下的豎井聯系測量工作[6];姬曉旭等提出一種井上采用雙測站極標法計算吊錘線坐標,井下采用邊角后方交會計算導線點坐標和起算邊方位角的豎井聯系測量新方法,相較于傳統聯系三角形法而言,具有定向精度高、測量原理明了、測量效率高、占用井筒時間短和操作簡單快捷等優點[7];孫士通等提出一種一井定向井下聯系測量控制點采用任意設站布點方式的改進方法,該方法提高了地鐵長隧道一井定向精度,極大提高了井下隧道定向邊測設的穩定性,保證定向邊方位角的精準性[8]。目前,在地鐵聯系測量方法中,無論是單井聯系測量[9-11]還是兩井聯系測量[12-13],傳統的測量方法為全人工瞄準測量,測量過程中經易受到諸多外部環境條件影響[14],致使整體作業效率低、費人費時、易出錯[15]。
基于以上不足之處,提出一種半自動化聯系測量方法,采用“TSDI多測回測角”機載軟件,配合徠卡全站儀,并利用研發的數據后處理軟件,以期真正實現半自動化聯系測量。
1 方法介紹
無論是單井聯系測量還是兩井聯系測量,傳統最常用的方式就是懸掛鋼絲測量,基本原理即在近井點架設全站儀,人工觀測并記錄近井點與后視點和鋼絲之間的角度和距離,再通過人工數據整理,組成聯系三角定向導線或無定向導線,代入地面已知點坐標成果,經過嚴密平差解算出井下待求控制點坐標和控制邊方位角成果[16-17]。
“TSDI多測回測角”機載軟件是一款自主開發的全站儀測量軟件,軟件通過學習點信息,支配全站儀實現自動跟蹤采集相應方向點角度和距離信息,達到多測回角度和距離自動采集記錄的效果[18-20]。軟件直接內嵌于徠卡各系列全站儀,無需外掛設備,無需開通GeoCOM,穩定可靠。
半自動化聯系測量工作流程見圖1,在使用過程中需要注意以下幾點。
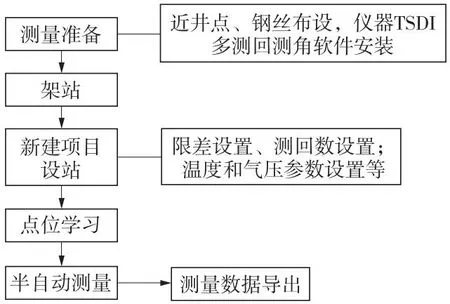
圖1 半自動化聯系測量流程Fig.1 The process of Semi-automatic Connection Mea-surement
(1)待測鋼絲需要分別在井上、井下適當的位置粘上反射片。
(2)點位學習的時候,后視點棱鏡學習應選擇ATR自動照準模式,鋼絲反射片學習應選擇無棱鏡模式。
(3)點位學習完成后,測量類型選擇自動定位,測量的時候儀器會自動跳轉到待測點,然后人工點擊測量,當跳轉到鋼絲位置時需要人工精確瞄準鋼絲后再點擊測量。
(4)測量過程中鋼絲點位的水平角是測量的重點,需要嚴格把控水平角限差,做到精確對準測量。而豎直角和斜距只是用來計算平距,故豎直角和斜距不作限差限制。
采用以上方法,可以減少全人工操作繁瑣的工序,大幅提高外業數據采集的效率,規避人工記錄數據易出錯的問題,實現數據自動化整理。
2 數據處理軟件設計與實現
2.1 軟件總體設計
軟件設計包括3個層次。
①原始觀測數據讀取,數據格式為“TSDI多測回測角”軟件生成的TPT文件格式。
②參數設置,設置水平角歸零差、2C互差、同一方向值測回間互差限差,設置平距測回內和測回間較差限差,設置距離改正地球曲率半徑和平均折光系數[18]。
③數據整理,輸出Excel觀測手簿、平差報告、整理后的導線數據。
軟件設計主要原則如下。
①軟件可靠性,通過參數設置,檢查觀測數據各項指標是否超限,通過實例驗證角度和距離計算理論方法正確可靠。
②軟件生成成果多樣性,目前可生成Excel電子手簿,代替人工記錄手簿;可生成平差報告,分別針對水平角和水平距離輸出詳細報告;可生成兩款不同導線平差軟件所需數據格式,滿足不同平差軟件需求。
2.2 平距計算
聯系測量過程中在測站架設全站儀,觀測記錄方向測點的水平角、豎直角和斜距,距離角度示意見圖2。
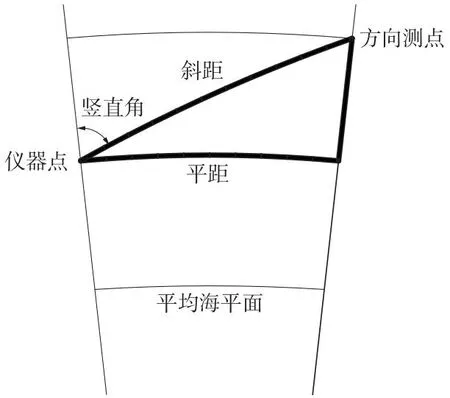
圖2 距離角度示意Fig.2 The sketch map of distance and angle
通過豎直角和斜距可計算出測站到方向測點的平面距離,基于測站高程面的平面距離計算式為

式中,D平為基于測站高程面的平面距離;S斜為測站到方向測點的測量斜距;β為測站到方向測點的豎直角讀數;k為平均折光系數;R為地球曲率半徑。
利用徠卡全站儀搭載“TSDI多測回測角”軟件,采集2組觀測數據,采用兩種方案獲取平面距離。方案一:采用人工操作全站儀方式直接測量并記錄測站到方向測點之間的平面距離;方案二:利用采集的豎直角和斜距通過式(1)計算平面距離。兩種方案所得平面距離對比結果見表1。
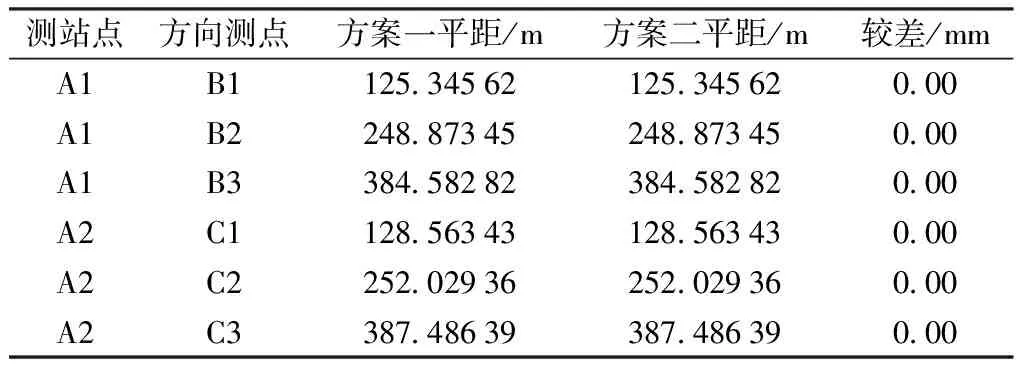
表1 方案一與方案二所得平面距離對比
由表1可知,本文所列平距計算公式計算所得平面距離與全站儀所測平面距離完全一致。
2.3 軟件實現與驗證
根據提出的軟件總體設計原則,結合平面距離計算方法,基于VB.NET開發一款專門針對半自動化聯系測量數據整理軟件,軟件功能簡單實用,界面清晰,操作簡便,軟件主界面見圖3。
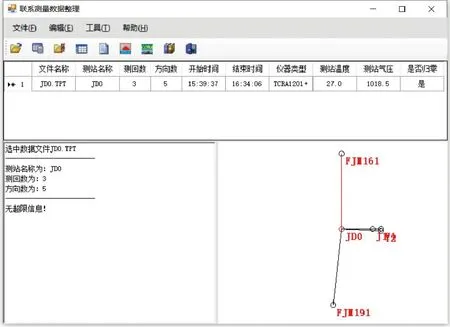
圖3 軟件主界面示例Fig.3 Example of software main interface
采用本軟件對深圳地鐵建設三期工程中1個車站的1次聯系測量的數據進行整理,并與幾款常用軟件對比,結果見表2、表3。

表2 不同軟件數據整理方向角對比 (°)

表3 不同軟件數據整理平面距離對比 m
通過對比可知,采用本文聯系測量數據整理軟件與常用的幾款成熟軟件整理結果一致,表明數據整理結果可靠,可用于半自動化聯系測量數據處理。
3 半自動聯系測量方法應用分析
3.1 實例介紹
深圳地鐵三期某條線路盾構井需進行聯系測量,該盾構井條件受限,長度僅為38 m,而單向盾構隧道長度達到2 km。該工點地面控制網采用附合導線測量方式,由地面4個控制點對其近井加密點進行加密測量,然后通過近井點對該井開展聯系測量工作,井上井下點位示意見圖4。
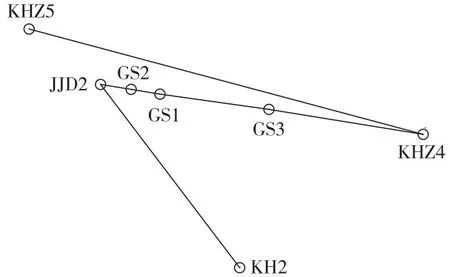
圖4 井上井下點位示意Fig.4 The sketch map of points on and underground the well
本次采用2種方案開展聯系測量工作,具體方案如下。
(1)常規方法
采用懸掛3根鋼絲,組成1個單井聯系三角形測量和2個兩井定向聯系測量,通過不同方法組合確保人工聯系測量方法成果可靠,為驗證方案二半自動化方法成果可靠性提供基準。整個過程中,從照準、測量到讀數記錄,再到數據整理等,人工干預程度較高。
(2)半自動化方法
采用全站儀自動定位加人工輔助瞄準鋼絲的方式,基本實現定位、數據采集、記錄、后處理自動化,大幅降低人工干預的程度和整個測量過程占用的時間。
3.2 應用分析
通過對2種方案聯系測量數據進行處理,得到井下控制點的坐標及控制邊的方位角,2種方案成果對比見表4和表5。
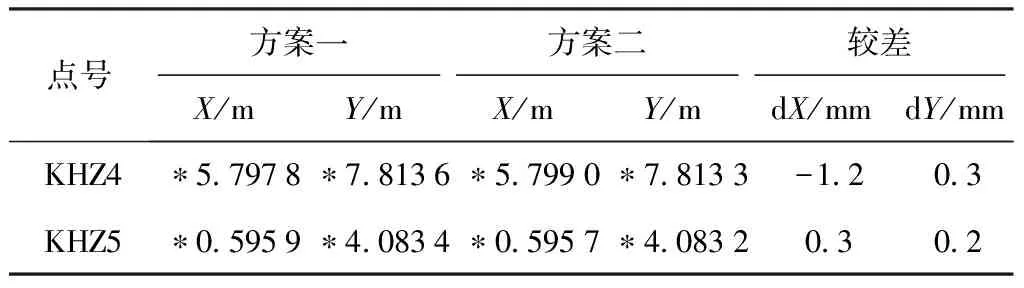
表4 2種方法所得控制點坐標對比(簡化坐標)

表5 兩種不同聯系測量方法所得控制邊方位角對比
由表4、表5可知,方法成果與傳統方法各自獨立測量成果一致,方位角較差2.75″,滿足城市軌道交通工程測量規范中關于各次地下近井定向邊方位角較差應小于16″的限差要求,精度可靠。
除此之外,對兩種方案聯系測量工作進行綜合對比分析如下。
(1)方案一:需要設置井上和井下2個測量組,每組需要3~4人,完成全部聯系測量工作花費約4 h,共完成人工記錄觀測數據48組;
(2)方案二:在確保鋼絲穩定的情況下,設置1個測量組,僅需2人,先測井上再測井下,完成全部聯系測量工作花費約1 h,自動記錄觀測數據48組。
由對比分析可知,方案二使用人員少,測量速度快,占用工作井時間短,對施工的影響小,較傳統人工方法工作效率高。
4 結論
通過對半自動化聯系測量方法介紹、數據處理軟件設計開發及半自動化聯系測量實例應用分析,得出以下結論。
(1)提出的半自動化聯系測量可操作性強,使用測量人員少,占用施工時間少,測量效率更高,工作效率約為傳統聯系測量方法的2倍。
(2)通過實踐,采用本文聯系測量數據整理軟件與常用的幾款成熟軟件整理結果一致,表明數據整理結果可靠,可用于半自動化聯系測量數據處理。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08