基于早期時(shí)間序列分類的可解釋實(shí)時(shí)機(jī)動(dòng)識(shí)別算法
2024-02-28 01:26:18龐諾言關(guān)東海袁偉偉
計(jì)算機(jī)工程與科學(xué) 2024年2期
龐諾言,關(guān)東海,袁偉偉
(南京航空航天大學(xué)計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,江蘇 南京 211106)
1 引言
在空戰(zhàn)決策中,準(zhǔn)確而快速地識(shí)別出敵機(jī)機(jī)動(dòng)動(dòng)作,可以有效地感知空戰(zhàn)態(tài)勢(shì)和捕捉敵機(jī)戰(zhàn)術(shù)意圖。機(jī)動(dòng)動(dòng)作是指戰(zhàn)斗機(jī)在執(zhí)行空戰(zhàn)戰(zhàn)術(shù)時(shí),具有明確特點(diǎn)的一系列飛行動(dòng)作。對(duì)于戰(zhàn)斗機(jī)機(jī)動(dòng)的識(shí)別是國內(nèi)外空戰(zhàn)領(lǐng)域研究的重點(diǎn)問題,也是人工智能領(lǐng)域的一項(xiàng)挑戰(zhàn)[1]。戰(zhàn)斗機(jī)執(zhí)行機(jī)動(dòng)過程具有時(shí)序關(guān)系,故對(duì)戰(zhàn)斗機(jī)機(jī)動(dòng)的識(shí)別是一個(gè)時(shí)間序列分類問題。但是如果在敵機(jī)執(zhí)行機(jī)動(dòng)完畢后,再去識(shí)別機(jī)動(dòng),就失去了實(shí)際意義。在實(shí)際場(chǎng)景中,需要觀測(cè)敵機(jī)飛行時(shí)的部分?jǐn)?shù)據(jù)進(jìn)行識(shí)別,這就是時(shí)間序列分類中的早期分類問題,故以此設(shè)計(jì)算法識(shí)別機(jī)動(dòng)。
針對(duì)機(jī)動(dòng)識(shí)別問題,空戰(zhàn)領(lǐng)域的研究人員提出了多種戰(zhàn)斗機(jī)機(jī)動(dòng)識(shí)別方法,例如專家經(jīng)驗(yàn)[2,3]、多維動(dòng)態(tài)時(shí)間規(guī)整[4,5]、支持向量機(jī)[6,7]、貝葉斯網(wǎng)絡(luò)[8,9]和神經(jīng)網(wǎng)絡(luò)[10,11]等。但是上述方法具有如下不足:(1)大部分應(yīng)用于離線場(chǎng)景,無法進(jìn)行實(shí)時(shí)的機(jī)動(dòng)識(shí)別;少數(shù)已有工作雖然進(jìn)行實(shí)時(shí)識(shí)別,但需要大量專家經(jīng)驗(yàn)和先驗(yàn)知識(shí),且識(shí)別出完整機(jī)動(dòng)的時(shí)間較長;(2)大部分已有模型中需要的數(shù)據(jù)在實(shí)際應(yīng)用中無法獲得,如敵機(jī)滾轉(zhuǎn)角信息,如果模型無法獲得完備的信息,那么可能導(dǎo)致無法識(shí)別或識(shí)別準(zhǔn)確率低等問題;(3)已有模型不具有可解釋性,對(duì)于空戰(zhàn)決策領(lǐng)域,不透明的決策將使決策者面臨更大的決策風(fēng)險(xiǎn)。
針對(duì)空戰(zhàn)環(huán)境中實(shí)時(shí)性要求高且需要保證可解釋性的機(jī)動(dòng)識(shí)別問題,本文設(shè)計(jì)基于早期時(shí)間序列分類的可解釋實(shí)時(shí)機(jī)動(dòng)識(shí)別算法。對(duì)于算法實(shí)時(shí)性問題,本文設(shè)計(jì)了2層識(shí)別模式,先將完整機(jī)動(dòng)通過時(shí)間窗口劃分出多個(gè)時(shí)間較短的機(jī)動(dòng)單元,并提取機(jī)動(dòng)單元中的時(shí)序特征,再使用集成學(xué)習(xí)算法對(duì)機(jī)動(dòng)單元進(jìn)行識(shí)別,通過對(duì)機(jī)動(dòng)單元的監(jiān)控保證實(shí)時(shí)性,最后通過機(jī)動(dòng)窗口確定早期時(shí)間序列分類決策點(diǎn)進(jìn)而識(shí)別完整機(jī)動(dòng)。對(duì)于空戰(zhàn)信息不完備的問題,本文使用雷達(dá)采集的敵機(jī)坐標(biāo)信息,先通過卡爾曼濾波獲得更為真實(shí)的敵機(jī)位置,再通過領(lǐng)域知識(shí)和時(shí)序信息提取相關(guān)特征,以滿足機(jī)動(dòng)識(shí)別的特征需求。對(duì)于算法可解釋性問題,本文使用可解釋模型通過特征的貢獻(xiàn)度對(duì)模型進(jìn)行解釋,再按照貢獻(xiàn)度選擇特征進(jìn)行消融實(shí)驗(yàn),從而獲得最優(yōu)的特征組合。空戰(zhàn)環(huán)境中戰(zhàn)斗機(jī)執(zhí)行機(jī)動(dòng)具有連續(xù)性,無法事先標(biāo)記時(shí)間序列開始點(diǎn)和結(jié)束點(diǎn),本文算法通過劃分機(jī)動(dòng)單元巧妙地解決了這一問題,通過監(jiān)控機(jī)動(dòng)單元的變化進(jìn)而獲得機(jī)動(dòng)動(dòng)作的開始點(diǎn)和結(jié)束點(diǎn)。最后,使用此算法對(duì)斤斗、爬升、俯沖、盤旋、破S、螺旋、尾沖、急轉(zhuǎn)、大錘機(jī)動(dòng)9種機(jī)動(dòng)動(dòng)作進(jìn)行實(shí)時(shí)識(shí)別,算法平均可在完整機(jī)動(dòng)動(dòng)作執(zhí)行到20%時(shí),準(zhǔn)確識(shí)別機(jī)動(dòng)動(dòng)作,識(shí)別準(zhǔn)確率可達(dá)93%,具有在線實(shí)時(shí)識(shí)別的能力和較高的實(shí)用價(jià)值。
2 相關(guān)工作
對(duì)于戰(zhàn)斗機(jī)機(jī)動(dòng)識(shí)別問題,大量的研究人員提出了解決思路。文獻(xiàn)[2]將機(jī)動(dòng)動(dòng)作分解為機(jī)動(dòng)動(dòng)作元,降低動(dòng)作描述的復(fù)雜度,再采用隨機(jī)森林和支持向量機(jī)進(jìn)行在線識(shí)別。文獻(xiàn)[3]通過分析飛行過程中的各種參數(shù),建立特征數(shù)據(jù)庫來模擬所有機(jī)動(dòng)類型,并在此基礎(chǔ)上利用模式識(shí)別理論實(shí)現(xiàn)自動(dòng)識(shí)別。文獻(xiàn)[4]利用多維動(dòng)態(tài)時(shí)間規(guī)整算法MDTW(Multidimensional Dynamic Time Warp- ing)對(duì)飛機(jī)動(dòng)作進(jìn)行離線識(shí)別和評(píng)估。文獻(xiàn)[5]對(duì)MDTW進(jìn)一步改進(jìn),利用動(dòng)態(tài)規(guī)劃初步匹配,再通過支持向量機(jī)精準(zhǔn)識(shí)別。文獻(xiàn)[6]提出了一種基于運(yùn)動(dòng)分解和層次支持向量機(jī)的機(jī)動(dòng)識(shí)別方法,結(jié)合運(yùn)動(dòng)分解的思想增強(qiáng)識(shí)別的針對(duì)性。文獻(xiàn)[7]利用支持向量機(jī)構(gòu)建機(jī)動(dòng)軌跡分割點(diǎn)檢測(cè)模型,同時(shí)采用基于馬氏距離的動(dòng)態(tài)時(shí)間規(guī)整神經(jīng)網(wǎng)絡(luò)構(gòu)建機(jī)動(dòng)軌跡識(shí)別模型,融合2個(gè)模型實(shí)現(xiàn)在線機(jī)動(dòng)軌跡識(shí)別。文獻(xiàn)[8]通過基于動(dòng)態(tài)時(shí)間規(guī)整DTW(Dynamic Time Warping)距離的時(shí)間序列層次聚類方法進(jìn)行分類,再通過貝葉斯網(wǎng)絡(luò)進(jìn)行推理。文獻(xiàn)[9]根據(jù)專家經(jīng)驗(yàn)與先驗(yàn)知識(shí)構(gòu)建基于動(dòng)態(tài)貝葉斯網(wǎng)絡(luò)的機(jī)動(dòng)動(dòng)作識(shí)別模型,并通過模糊灰度理論對(duì)動(dòng)作進(jìn)行評(píng)估。文獻(xiàn)[10]通過反向傳播神經(jīng)網(wǎng)絡(luò)BPNN(Back Propagation Neural Network)推導(dǎo)了無源雷達(dá)系統(tǒng)中機(jī)動(dòng)目標(biāo)的特征量,利用幀間時(shí)延和多普勒頻移的變化值對(duì)目標(biāo)機(jī)動(dòng)進(jìn)行分類。文獻(xiàn)[11]利用深度學(xué)習(xí)中最常用的序列學(xué)習(xí)方法長短期記憶LSTM(Long Short-Term Memory)循環(huán)神經(jīng)網(wǎng)絡(luò)對(duì)飛行機(jī)動(dòng)進(jìn)行識(shí)別。
機(jī)動(dòng)的實(shí)時(shí)識(shí)別希望盡可能早地識(shí)別出敵機(jī)機(jī)動(dòng),是一項(xiàng)早期時(shí)間序列分類任務(wù)。早期時(shí)間序列分類是指在觀測(cè)到完整時(shí)間序列的前期部分?jǐn)?shù)據(jù)時(shí)就可以給出完整序列的分類[12],如圖1所示。Xing等人[13]提出了基于最近鄰分類1NN(1 Nearest Neighbor)的時(shí)間序列早期分類方法ECTS(Early Classification on Time Series),并提出了最小預(yù)測(cè)長度MPL(Minimum Prediction Length)的概念。隨后,Xing等人[14]又在此方法上進(jìn)行改進(jìn),引入局部形狀元素(Shapelet)作為特征,使ECTS具有可解釋性。Schfer等人[15]提出TEASER(Two-tier Early and Accurate Series classifiER),這是一種變長MPL的早期時(shí)間序列分類方法。本文基于早期時(shí)間序列分類的思想,采用2層算法結(jié)構(gòu)對(duì)機(jī)動(dòng)進(jìn)行識(shí)別,使用集成學(xué)習(xí)算法進(jìn)行分類,并引入可解釋模型進(jìn)行模型解釋,最后通過機(jī)動(dòng)窗口確定MPL進(jìn)行實(shí)時(shí)識(shí)別。
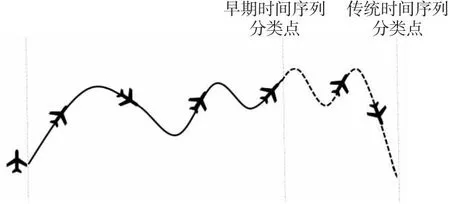
Figure 1 Early time series classification圖1 早期時(shí)間序列分類
3 機(jī)動(dòng)識(shí)別算法
機(jī)動(dòng)識(shí)別算法的輸入信息為雷達(dá)采集的戰(zhàn)斗機(jī)實(shí)時(shí)經(jīng)度、緯度和高度坐標(biāo)數(shù)據(jù),輸出信息為戰(zhàn)斗機(jī)的實(shí)時(shí)機(jī)動(dòng)類別。首先,通過坐標(biāo)軸轉(zhuǎn)換和卡爾曼濾波將坐標(biāo)數(shù)據(jù)處理成機(jī)動(dòng)識(shí)別算法需要的標(biāo)準(zhǔn)數(shù)據(jù);其次,通過特征構(gòu)造和加窗處理將標(biāo)準(zhǔn)坐標(biāo)數(shù)據(jù)構(gòu)造成時(shí)序特征,并切分為機(jī)動(dòng)單元;然后選擇最優(yōu)窗口大小和最優(yōu)特征組合劃分機(jī)動(dòng)單元,使用集成學(xué)習(xí)算法對(duì)機(jī)動(dòng)單元進(jìn)行識(shí)別,并使用可解釋模型對(duì)識(shí)別模型進(jìn)行解釋;最后,通過機(jī)動(dòng)窗口判斷機(jī)動(dòng)地執(zhí)行與改變,實(shí)時(shí)輸出機(jī)動(dòng)類型。機(jī)動(dòng)識(shí)別算法流程如圖2所示,其包括機(jī)動(dòng)時(shí)序數(shù)據(jù)標(biāo)準(zhǔn)化、機(jī)動(dòng)時(shí)序特征構(gòu)造、機(jī)動(dòng)單元識(shí)別和實(shí)時(shí)機(jī)動(dòng)識(shí)別4個(gè)模塊。
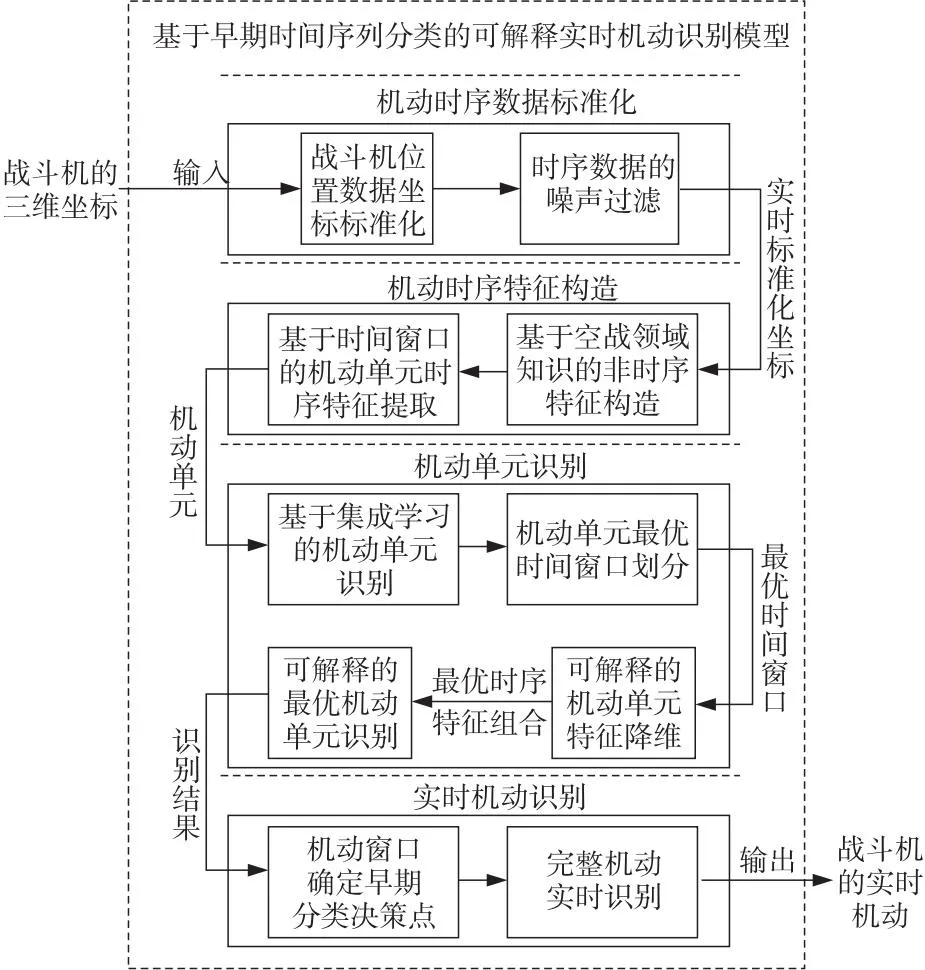
Figure 2 Flow chart of maneuver identification圖2 機(jī)動(dòng)識(shí)別流程圖
3.1 機(jī)動(dòng)數(shù)據(jù)標(biāo)準(zhǔn)化
空戰(zhàn)環(huán)境中,若雷達(dá)僅獲取到目標(biāo)的經(jīng)度、緯度和高度坐標(biāo)信息且獲取到的數(shù)據(jù)可能存在一定的噪聲,這將非常不利于實(shí)時(shí)識(shí)別敵機(jī)執(zhí)行的機(jī)動(dòng)類型,故需要對(duì)機(jī)動(dòng)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理。具體步驟為:先通過坐標(biāo)系轉(zhuǎn)換,將所有機(jī)動(dòng)數(shù)據(jù)轉(zhuǎn)移到統(tǒng)一坐標(biāo)系下,再通過卡爾曼濾波將數(shù)據(jù)進(jìn)行降噪處理。
本文中戰(zhàn)斗機(jī)的經(jīng)度、緯度和高度是在大地LLA(Longitude, Latitude, Altitude)坐標(biāo)系下獲取的,而空戰(zhàn)中常用的坐標(biāo)系一般為東北天坐標(biāo)系ENU(East-North-Up),故需要將坐標(biāo)數(shù)據(jù)轉(zhuǎn)換到ENU坐標(biāo)系下。雖然雷達(dá)獲取到了戰(zhàn)斗機(jī)的坐標(biāo),但這并不一定是戰(zhàn)斗機(jī)的真實(shí)位置,可能存在一定誤差。通過卡爾曼濾波,可以獲得一個(gè)基于測(cè)量值的最優(yōu)估計(jì),進(jìn)而更加準(zhǔn)確地估算戰(zhàn)斗機(jī)的實(shí)際位置。
3.2 機(jī)動(dòng)時(shí)序特征構(gòu)造
經(jīng)過數(shù)據(jù)標(biāo)準(zhǔn)化后,雷達(dá)傳入的每條數(shù)據(jù)已經(jīng)從帶有噪聲的LLA坐標(biāo)系下的ALLA=[Longitude,Latitude,Altitude] 轉(zhuǎn)換到了濾波后較為準(zhǔn)確的ENU坐標(biāo)系下的AENU=[X,Y,Z]。但是對(duì)于機(jī)動(dòng)識(shí)別而言,使用三維坐標(biāo)信息顯然無法反映戰(zhàn)斗機(jī)的飛行狀態(tài)。故機(jī)動(dòng)時(shí)序特征構(gòu)造模塊依據(jù)領(lǐng)域知識(shí)構(gòu)造戰(zhàn)斗機(jī)的飛行特征,再通過劃分時(shí)間窗口切分機(jī)動(dòng)單元,并提取機(jī)動(dòng)單元內(nèi)時(shí)序特征。通過上述方法,可以滿足機(jī)動(dòng)識(shí)別算法識(shí)別需求,并保證模型所有特征都是透明的。
基于領(lǐng)域知識(shí),本文通過采樣點(diǎn)之間的位置變化可計(jì)算出敵機(jī)的三軸速率信息,再通過速率信息計(jì)算出俯仰角和偏航角等姿態(tài)角信息,從而反映戰(zhàn)斗機(jī)在進(jìn)行機(jī)動(dòng)時(shí)的動(dòng)作變化情況。基于領(lǐng)域知識(shí)的特征構(gòu)造算法如算法1所示。
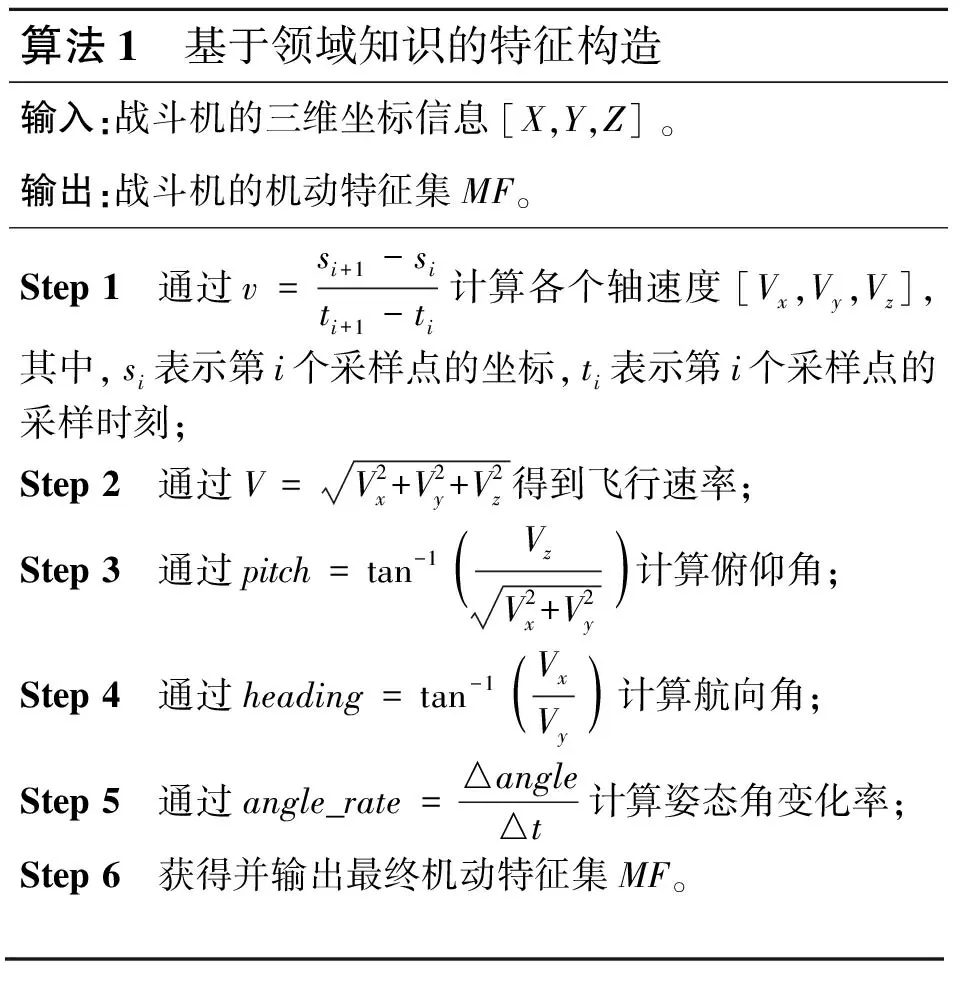
算法1 基于領(lǐng)域知識(shí)的特征構(gòu)造輸入:戰(zhàn)斗機(jī)的三維坐標(biāo)信息[X,Y,Z]。輸出:戰(zhàn)斗機(jī)的機(jī)動(dòng)特征集MF。Step 1 通過v=si+1-siti+1-ti計(jì)算各個(gè)軸速度[Vx,Vy,Vz],其中,si表示第i個(gè)采樣點(diǎn)的坐標(biāo),ti表示第i個(gè)采樣點(diǎn)的采樣時(shí)刻;Step 2 通過V = V2x+V2y+V2z得到飛行速率;Step 3 通過pitch = tan-1(VzV2x+V2y)計(jì)算俯仰角;Step 4 通過heading=tan-1(VxVy)計(jì)算航向角;Step 5 通過angle_rate=△angle△t計(jì)算姿態(tài)角變化率;Step 6 獲得并輸出最終機(jī)動(dòng)特征集MF。
通過上述的特征構(gòu)造,可以反映出戰(zhàn)斗機(jī)在采樣點(diǎn)的飛行狀態(tài),但是無法反映出戰(zhàn)斗機(jī)執(zhí)行機(jī)動(dòng)時(shí)的時(shí)序特征。對(duì)于時(shí)間序列分類問題,劃定時(shí)間窗口提取特征可以有效地捕捉一段時(shí)間內(nèi)數(shù)據(jù)的特征。常見的時(shí)序特征包括提取窗口內(nèi)極值、均值和標(biāo)準(zhǔn)差等。通過時(shí)間窗口劃分后的一段機(jī)動(dòng)數(shù)據(jù)就是一個(gè)機(jī)動(dòng)單元MU(ManeuverUnit),劃分時(shí)間窗口的長度需要通過實(shí)驗(yàn)確定。基于時(shí)序關(guān)系的特征構(gòu)造算法如算法2所示。

算法2 基于時(shí)序關(guān)系的特征構(gòu)造輸入:戰(zhàn)斗機(jī)的機(jī)動(dòng)特征集。輸出:具有時(shí)序關(guān)系的機(jī)動(dòng)單元MU。Step 1 對(duì)于MF中每一維特征F,劃分時(shí)間窗口[yi,yi+m],其中m為窗口大小;Step 2 通過ymean=sum([yi,yi+m])m 得出窗口內(nèi)均值;Step 3 通過ymax=max([yi,yi+m]) 計(jì)算得到窗口內(nèi)最大值,通過ymin=min([yi,yi+m])計(jì)算得到最小值;Step 4 通過yrange=ymax-ymin 計(jì)算極差;Step 5 提取窗口內(nèi)的其他時(shí)序信息;Step 6 獲得最終的機(jī)動(dòng)單元MU。
通過對(duì)機(jī)動(dòng)時(shí)序特征的構(gòu)造,將超視距空戰(zhàn)下通過雷達(dá)獲取的三維坐標(biāo)信息擴(kuò)充為可以進(jìn)行機(jī)動(dòng)識(shí)別的高維數(shù)據(jù)信息,以有效捕捉機(jī)動(dòng)時(shí)序變化特征。
3.3 機(jī)動(dòng)單元識(shí)別
經(jīng)過機(jī)動(dòng)時(shí)序特征的構(gòu)造與提取,一個(gè)完整機(jī)動(dòng)被拆分成長度相同的機(jī)動(dòng)單元,如圖3所示。一個(gè)機(jī)動(dòng)單元的長度相較于完整機(jī)動(dòng)有了大幅縮短,這樣就可以僅觀測(cè)小部分?jǐn)?shù)據(jù)就獲得機(jī)動(dòng)信息,極大地提高了實(shí)時(shí)性。機(jī)動(dòng)單元識(shí)別模塊先通過集成學(xué)習(xí)算法CatBoost[16]找到切分機(jī)動(dòng)單元的最優(yōu)時(shí)間窗口,再通過SHAP(SHapley Additive exPlanation)可解釋模型[17]對(duì)特征進(jìn)行貢獻(xiàn)度解釋并選擇最優(yōu)特征。最優(yōu)時(shí)間窗口和最優(yōu)特征構(gòu)成最優(yōu)機(jī)動(dòng)單元,使用集成學(xué)習(xí)算法CatBoost對(duì)最優(yōu)機(jī)動(dòng)單元進(jìn)行識(shí)別。通過上述操作獲得的識(shí)別準(zhǔn)確率高且輕量級(jí)的模型符合機(jī)動(dòng)識(shí)別場(chǎng)景需求。
本文使用集成學(xué)習(xí)算法CatBoost進(jìn)行機(jī)動(dòng)單元識(shí)別并尋找最優(yōu)時(shí)間窗口大小。這是一種基于對(duì)稱決策樹算法的梯度提升決策樹GBDT(Gradient Boosting Decision Tree)框架。這種對(duì)稱結(jié)構(gòu)使得其采用較少的參數(shù)就能獲得高效的訓(xùn)練速度和預(yù)測(cè)準(zhǔn)確率[18],適合于機(jī)動(dòng)識(shí)別場(chǎng)景。機(jī)動(dòng)數(shù)據(jù)的分類算法流程如下:
第1步,初始化弱分類器的公式為式(1):
(1)
其中,F0(x)表示初始化弱分類器,此分類器會(huì)經(jīng)過多次迭代成為一個(gè)強(qiáng)大的分類器。
第2步,對(duì)于第t次迭代(t=1,2,…,T):
(1)對(duì)第i個(gè)樣本(i=1,2,…,n),利用損失函數(shù)L(ci,Ft(x))計(jì)算負(fù)梯度值,并將該值近似為殘差rti,如式(2)所示:
(2)
(3)對(duì)于j=1,2,…,J,計(jì)算葉子區(qū)域最佳擬合值ltj:
(3)
其中l(wèi)表示修正值。
由于式(3)的求解較難實(shí)現(xiàn),故對(duì)其近似值進(jìn)行計(jì)算:
(4)
通過式(4)對(duì)學(xué)習(xí)器進(jìn)行更新,如式(5)所示:
(5)
第3步,最終得到強(qiáng)學(xué)習(xí)器:
(6)
上述流程是應(yīng)用于二分類器,但是在機(jī)動(dòng)識(shí)別中類別數(shù)是K。對(duì)此,使用One-hot編碼先將每個(gè)類別轉(zhuǎn)為K維向量,每輪同時(shí)訓(xùn)練K棵樹,然后更改損失函數(shù)產(chǎn)生概率,確定機(jī)動(dòng)屬于某一類別的概率,最終實(shí)現(xiàn)對(duì)多個(gè)機(jī)動(dòng)進(jìn)行分類。
CatBoost 算法是在GBDT算法框架下改進(jìn)而來,主要包括建立樹結(jié)構(gòu)和樹結(jié)構(gòu)固定后求解葉子節(jié)點(diǎn)的值2個(gè)階段。第1階段是對(duì) GBDT 算法中的梯度計(jì)算方式進(jìn)行優(yōu)化,其改進(jìn)了 GBDT 算法在迭代過程中計(jì)算當(dāng)前GBDT算法的負(fù)梯度值的方式,采用排序性提升方法,在每一步的迭代過程中對(duì)GBDT算法的梯度進(jìn)行無偏估計(jì),緩解了GBDT算法的過擬合問題。第2階段確定葉子節(jié)點(diǎn)值的方法則和 GBDT 計(jì)算框架的方法相同[19]。
其次,機(jī)動(dòng)單元識(shí)別模塊設(shè)計(jì)基于SHAP的特征解釋,通過計(jì)算執(zhí)行機(jī)動(dòng)時(shí)每個(gè)特征的歸因值(Shapley)來衡量該特征對(duì)于最終輸出的貢獻(xiàn)程度。歸因值計(jì)算方式如式(7)所示:
(7)

(8)
(val(S∪{xi})-val(S))
(9)
其中,S表示模型中的特征子集,xi表示要解釋的樣本的特征向量,p表示特征數(shù)量,val(S)表示在特征組合S下的SHAP模型輸出值。通過上述計(jì)算,可以得出機(jī)動(dòng)識(shí)別中每個(gè)特征對(duì)于識(shí)別該機(jī)動(dòng)的貢獻(xiàn)。選擇貢獻(xiàn)較高的特征進(jìn)行消融實(shí)驗(yàn),獲得維度較低的特征組合,并實(shí)現(xiàn)對(duì)模型的解釋。
3.4 完整機(jī)動(dòng)識(shí)別
一段完整的機(jī)動(dòng)可能持續(xù)幾分鐘,而一個(gè)機(jī)動(dòng)單元只有幾秒。本文使用機(jī)動(dòng)窗口確定早期時(shí)間序列分類決策點(diǎn),實(shí)時(shí)輸出完整機(jī)動(dòng)類型。設(shè)機(jī)動(dòng)序列被分為s個(gè)機(jī)動(dòng)單元,則機(jī)動(dòng)序列可表示為R={MU1,MU2,MU3,…,MUs},其中,R表示機(jī)動(dòng)序列被拆分為機(jī)動(dòng)單元后的識(shí)別結(jié)果,MU表示識(shí)別的機(jī)動(dòng)單元。機(jī)動(dòng)窗口可以表示為MW=[MUk,MUk+1,…,MUk+a],其中,MW表示機(jī)動(dòng)窗口,MUk表示第k個(gè)識(shí)別的機(jī)動(dòng)單元,a表示機(jī)動(dòng)窗口長度,只有當(dāng)MW中全部為同一種機(jī)動(dòng)時(shí),才認(rèn)為機(jī)動(dòng)發(fā)生或者改變。
對(duì)于早期時(shí)間序列分類而言,機(jī)動(dòng)窗口就是最小預(yù)測(cè)長度,即進(jìn)行早期時(shí)間序列分類的決策點(diǎn)。設(shè)計(jì)機(jī)動(dòng)窗口既可以消除個(gè)別識(shí)別錯(cuò)誤的機(jī)動(dòng)單元對(duì)完整機(jī)動(dòng)識(shí)別的影響,又可以保證在一段機(jī)動(dòng)執(zhí)行過程中不會(huì)隨意改變識(shí)別結(jié)果,提高機(jī)動(dòng)識(shí)別的準(zhǔn)確性和實(shí)時(shí)性,還可以有效解決機(jī)動(dòng)動(dòng)作連續(xù)執(zhí)行無法標(biāo)記開始點(diǎn)和結(jié)束點(diǎn)的問題。在實(shí)時(shí)機(jī)動(dòng)識(shí)別時(shí),機(jī)動(dòng)窗口的大小是一個(gè)超參數(shù),可通過先驗(yàn)知識(shí)或?qū)嶒?yàn)確定。
4 實(shí)驗(yàn)
4.1 實(shí)驗(yàn)設(shè)置
為了驗(yàn)證本文機(jī)動(dòng)識(shí)別算法的有效性,本節(jié)設(shè)計(jì)仿真實(shí)驗(yàn)。實(shí)驗(yàn)使用DCS World模擬器飛行各項(xiàng)機(jī)動(dòng)動(dòng)作,使用Tacview 1.9.0輸出機(jī)動(dòng)動(dòng)作的三維坐標(biāo)數(shù)據(jù),實(shí)驗(yàn)中的采樣頻率為20 Hz,即每個(gè)采樣點(diǎn)間隔0.05 s。圖4為一條機(jī)動(dòng)數(shù)據(jù)的三維軌跡圖,執(zhí)行的機(jī)動(dòng)為盤旋、爬升和俯沖。下面將通過實(shí)驗(yàn)環(huán)境、實(shí)驗(yàn)數(shù)據(jù)集、對(duì)比方法和評(píng)價(jià)指標(biāo)具體介紹本文實(shí)驗(yàn)設(shè)置。
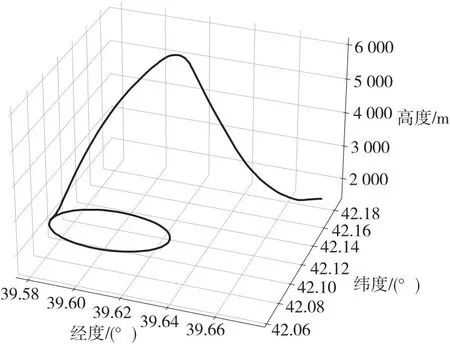
Figure 4 Maneuver three-dimensional trajectory diagram圖4 機(jī)動(dòng)三維軌跡圖
本文識(shí)別的機(jī)動(dòng)包括9種,分別為斤斗、爬升、俯沖、盤旋、破S、螺旋、尾沖、急轉(zhuǎn)和大錘機(jī)動(dòng)。為了獲得更多數(shù)據(jù)集來比較本文算法和其他算法的優(yōu)劣。實(shí)驗(yàn)從上述9種機(jī)動(dòng)中隨機(jī)選擇5種機(jī)動(dòng)進(jìn)行組合構(gòu)建數(shù)據(jù)集,通過比較識(shí)別效果,得出機(jī)動(dòng)之間的關(guān)系和特征對(duì)于識(shí)別機(jī)動(dòng)的重要性。從可能出現(xiàn)的組合中隨機(jī)選擇5組,設(shè)置的機(jī)動(dòng)組合和每種組合中機(jī)動(dòng)的數(shù)量如表1所示。實(shí)驗(yàn)使用訓(xùn)練集數(shù)據(jù)進(jìn)行訓(xùn)練,在驗(yàn)證集數(shù)據(jù)上選擇最優(yōu)窗口和最優(yōu)特征,在測(cè)試集數(shù)據(jù)上測(cè)試機(jī)動(dòng)識(shí)別算法性能。
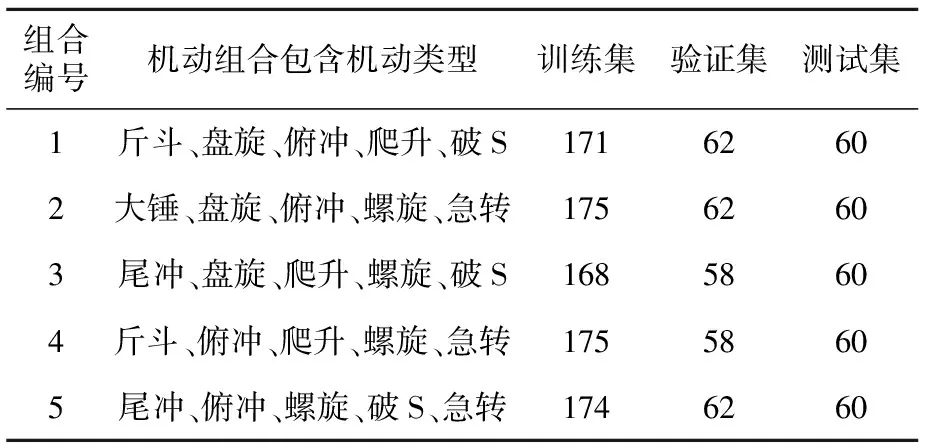
Table 1 Maneuver number of different maneuver combinations
對(duì)比算法:本文算法將與MDTW、深度學(xué)習(xí)模型中LSTM和BiLSTM算法進(jìn)行對(duì)比,比較他們?cè)谧R(shí)別機(jī)動(dòng)上的精度和實(shí)時(shí)性差異。
評(píng)價(jià)指標(biāo):本文使用準(zhǔn)確率(Accuracy)、精確率(Precision)、召回率(Recall)和F1-Score對(duì)分類結(jié)果進(jìn)行評(píng)估。此外,對(duì)于早期時(shí)間序列分類算法,需要對(duì)分類延遲率D(Delay rate)進(jìn)行評(píng)估。延遲率的定義為時(shí)間序列分類時(shí)間t相對(duì)于該時(shí)間序列總時(shí)間T的占比。
4.2 機(jī)動(dòng)單元識(shí)別
首先需要將機(jī)動(dòng)數(shù)據(jù)通過坐標(biāo)系轉(zhuǎn)換和噪聲過濾轉(zhuǎn)換為標(biāo)準(zhǔn)數(shù)據(jù)。圖5所示是將坐標(biāo)系的3個(gè)坐標(biāo)軸數(shù)據(jù)進(jìn)行卡爾曼濾波前后的對(duì)比。可以發(fā)現(xiàn),經(jīng)過濾波后的數(shù)據(jù)更加平滑,符合實(shí)際情況。
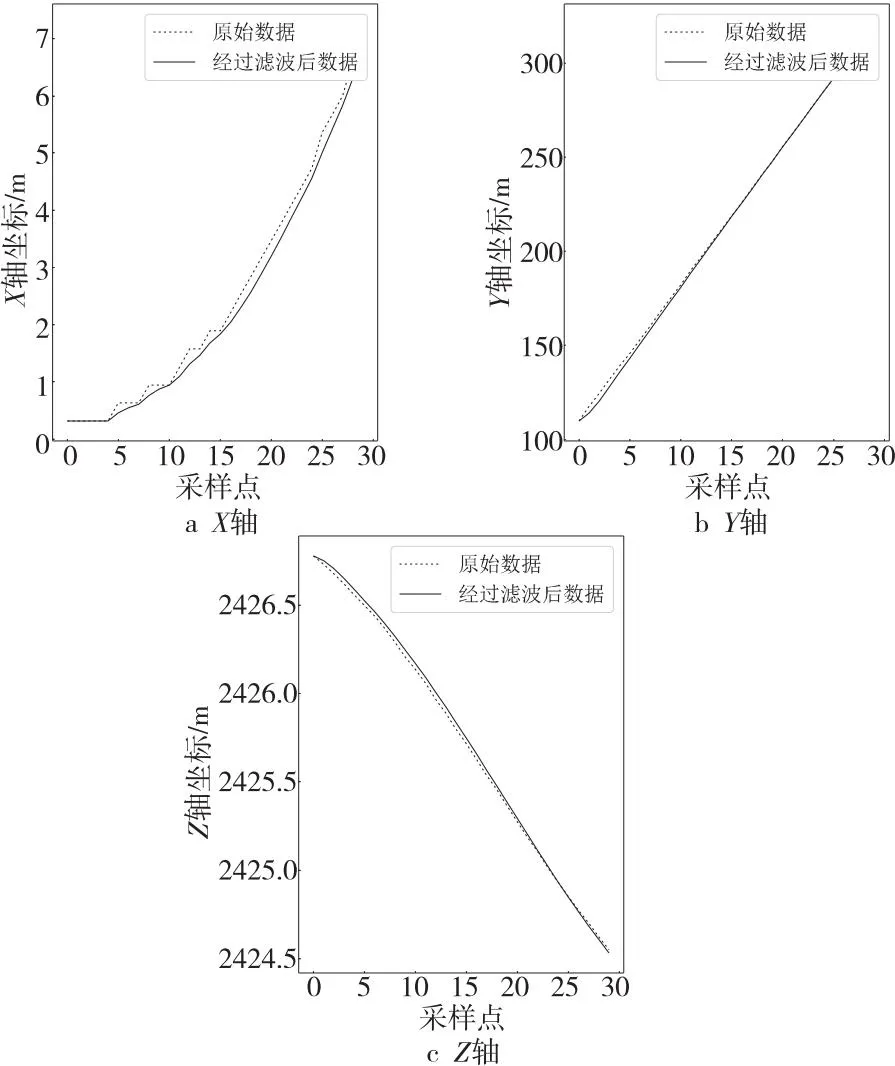
Figure 5 Comparison before and after data filtering圖5 數(shù)據(jù)濾波前后對(duì)比圖
在特征構(gòu)造過程中,通過領(lǐng)域知識(shí)構(gòu)造Z軸的速率、速率、俯仰角、俯仰角變化率和偏航角變化率5種特征;再通過時(shí)間窗口提取窗口內(nèi)最大值、最小值、極差、均值、方差、標(biāo)準(zhǔn)差以及變異系數(shù)7維時(shí)序特征,共同組合成35維機(jī)動(dòng)識(shí)別算法原始特征組合。
本文在最優(yōu)時(shí)間窗口尋優(yōu)實(shí)驗(yàn)中使用CatBoost模型,通過比較5種組合的機(jī)動(dòng)在不同窗口下識(shí)別機(jī)動(dòng)單元的準(zhǔn)確率,選擇最優(yōu)時(shí)間窗口。設(shè)計(jì)時(shí)間窗口大小從20到54每輪增加2個(gè)窗口分析結(jié)果,實(shí)驗(yàn)結(jié)果如圖6所示。為了滿足機(jī)動(dòng)識(shí)別的實(shí)時(shí)性和準(zhǔn)確性,選擇時(shí)間窗口大小為40的機(jī)動(dòng)段作為機(jī)動(dòng)單元,且每次進(jìn)入20個(gè)采樣點(diǎn)時(shí)劃分新的時(shí)間窗口,通過計(jì)算可知每個(gè)機(jī)動(dòng)單元的時(shí)間長度為2 s,每1 s重新劃分時(shí)間窗口。

Figure 6 Finding optimal time window size圖6 最優(yōu)時(shí)間窗口尋優(yōu)
在模型可解釋實(shí)驗(yàn)中,本文使用基于SHAP的模型解釋,先計(jì)算得到每種特征對(duì)于識(shí)別機(jī)動(dòng)的貢獻(xiàn)率,再將不同機(jī)動(dòng)組合的特征貢獻(xiàn)度累加并平均,得到最終特征貢獻(xiàn)度。如圖7所示為基于SHAP的特征貢獻(xiàn)度排名前15的特征,數(shù)值越大表示貢獻(xiàn)度越高。
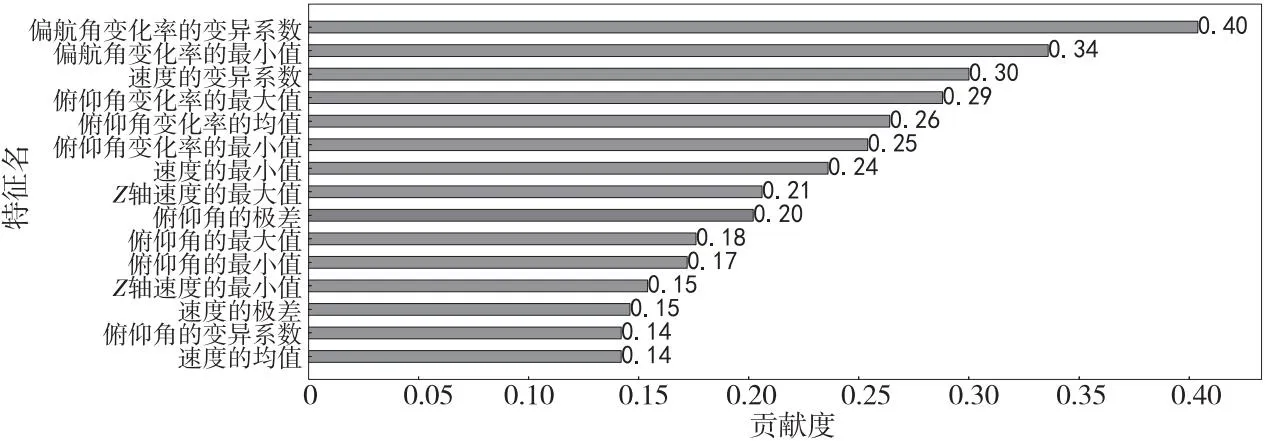
Figure 7 Feature contribution ranking based on SHAP圖7 基于SHAP的特征貢獻(xiàn)度排序
選擇特征貢獻(xiàn)度排名前10的特征進(jìn)行消融實(shí)驗(yàn),比較不同維度的特征組合對(duì)于識(shí)別精度的影響。由于過高的維度可能導(dǎo)致機(jī)動(dòng)識(shí)別算法運(yùn)算速度降低,過低的維度無法產(chǎn)生精度高的識(shí)別結(jié)果,故本文只比較3~6維的特征組合。經(jīng)過特征篩選,并綜合特征在不同組合上的表現(xiàn),不同維度的最優(yōu)特征組合如表2所示。可見,判斷機(jī)動(dòng)的最主要特征是戰(zhàn)斗機(jī)執(zhí)行機(jī)動(dòng)時(shí)的姿態(tài)角變化。
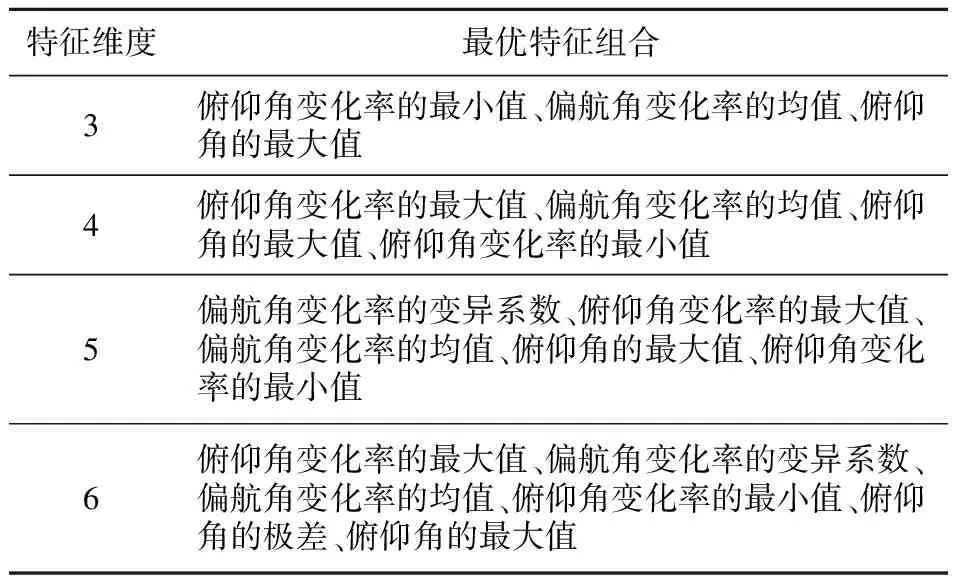
Table 2 Optimal combination of features in different dimensions
選擇最優(yōu)時(shí)間窗口大小為40個(gè)采樣點(diǎn)和最優(yōu)6維時(shí)序特征以及集成學(xué)習(xí)算法CatBoost,構(gòu)成一個(gè)最優(yōu)機(jī)動(dòng)單元識(shí)別算法OMU_CatBoost(Optimal Maneuver Unit CatBoost)。對(duì)于最終最優(yōu)機(jī)動(dòng)單元識(shí)別算法6維時(shí)序特征的貢獻(xiàn)度解釋如圖8所示,圖中貢獻(xiàn)度為5個(gè)機(jī)動(dòng)組合的貢獻(xiàn)度均值,貢獻(xiàn)度越高對(duì)應(yīng)數(shù)值越大。
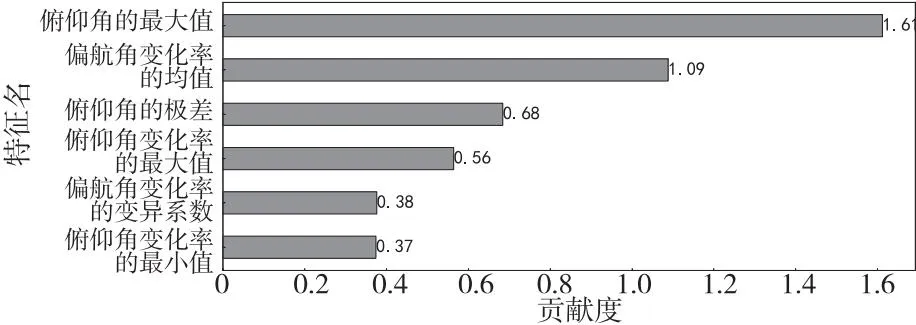
Figure 8 Optimal feature contribution based on SHAP圖8 基于SHAP的最優(yōu)特征貢獻(xiàn)度
選擇單個(gè)機(jī)動(dòng)組合進(jìn)行解釋,可以得出不同機(jī)動(dòng)動(dòng)作的特征貢獻(xiàn)度差異。圖9為對(duì)組合3和組合4進(jìn)行解釋獲得的特征貢獻(xiàn)度。可以得出,組合3中俯仰角的最大值特征貢獻(xiàn)度較高,是區(qū)分組合3中機(jī)動(dòng)動(dòng)作的主要特征;組合4中螺旋和急轉(zhuǎn)主要通過偏航角變化進(jìn)行區(qū)分,故偏航角變化率均值在此貢獻(xiàn)度較大。

Figure 9 Feature contribution of single combination圖9 單個(gè)組合的特征貢獻(xiàn)度
本文在測(cè)試集上使用不同組合的5種機(jī)動(dòng),將所提算法與其他機(jī)器學(xué)習(xí)算法進(jìn)行對(duì)比,比較不同算法識(shí)別最優(yōu)機(jī)動(dòng)單元的準(zhǔn)確率,實(shí)驗(yàn)結(jié)果如表3所示,表3中的機(jī)動(dòng)組合見表1。由于LSTM本身可以提取時(shí)序關(guān)系,故只對(duì)其進(jìn)行基于領(lǐng)域知識(shí)的特征構(gòu)造,且LSTM每個(gè)序列長度與本文算法的保持一致。結(jié)果表明,OMU_CatBoost在多個(gè)機(jī)動(dòng)組合上識(shí)別效果均高于其他機(jī)器學(xué)習(xí)算法的,能更準(zhǔn)確地識(shí)別機(jī)動(dòng)單元。

Table 3 Comparison of the proposed algorithm with other machine learning algorithms for maneuver unit identification
4.3 實(shí)時(shí)機(jī)動(dòng)識(shí)別
使用OMU_CatBoost,設(shè)計(jì)機(jī)動(dòng)識(shí)別窗口的大小從2到9個(gè)機(jī)動(dòng)單元,每次增加一個(gè)機(jī)動(dòng)單元進(jìn)行實(shí)驗(yàn),選擇最優(yōu)機(jī)動(dòng)識(shí)別窗口。實(shí)驗(yàn)結(jié)果如圖10所示,由于6個(gè)機(jī)動(dòng)窗口在所有組合中均達(dá)到了90%以上的精度,既保證實(shí)時(shí)性強(qiáng)又保證識(shí)別精度高,故本文選擇窗口大小為6的作為最優(yōu)機(jī)動(dòng)窗口。

Figure 10 Finding optimal maneuver window size圖10 最優(yōu)機(jī)動(dòng)窗口尋優(yōu)
使用最優(yōu)機(jī)動(dòng)窗口大小在測(cè)試集上對(duì)不同組合的完整機(jī)動(dòng)進(jìn)行分類,分類結(jié)果如表4所示。可以看到,對(duì)于完整的機(jī)動(dòng)識(shí)別具有較高的準(zhǔn)確率、精確率、召回率以及F1-Score,且由于只有6個(gè)機(jī)動(dòng)窗口即7 s的分類時(shí)間,故具有較強(qiáng)的時(shí)效性。此外,不同組合中的不同機(jī)動(dòng)類型會(huì)對(duì)最終識(shí)別精度產(chǎn)生影響,例如組合2中急轉(zhuǎn)機(jī)動(dòng)是角速度較大的盤旋,故2種機(jī)動(dòng)容易產(chǎn)生錯(cuò)分,組合5中尾沖機(jī)動(dòng)的后半部分和俯沖機(jī)動(dòng)十分相似,容易造成錯(cuò)分。
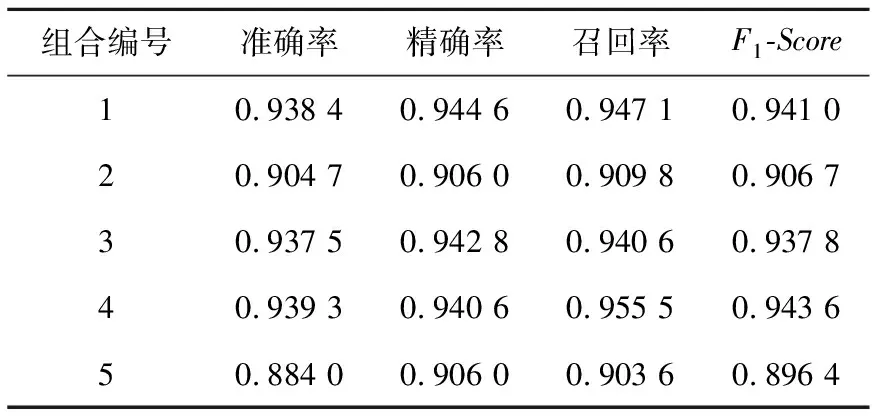
Table 4 Complete maneuver identification results
不同機(jī)動(dòng)的執(zhí)行時(shí)間不同,表5為各種機(jī)動(dòng)平均執(zhí)行時(shí)間及對(duì)于機(jī)動(dòng)識(shí)別算法延遲率的評(píng)估。可以看到,本文算法可以在機(jī)動(dòng)執(zhí)行的早期時(shí)間就對(duì)機(jī)動(dòng)動(dòng)作進(jìn)行識(shí)別,具有較強(qiáng)的實(shí)時(shí)性。

Table 5 Delay rate of identification
MDTW是解決時(shí)間序列分類最常用的算法,其通過比較2個(gè)序列的相似程度找到與測(cè)試序列最相近的序列,從而獲得被測(cè)試序列的分類標(biāo)簽。使用MDTW算法時(shí),如果以每個(gè)采樣點(diǎn)數(shù)據(jù)為一條數(shù)據(jù),運(yùn)算效率非常低,故本文對(duì)其進(jìn)行如下改進(jìn):提取40個(gè)采樣點(diǎn)的均值作為一條數(shù)據(jù),加快運(yùn)算速度,稱之為加速多維動(dòng)態(tài)時(shí)間規(guī)整AMDTW(Accelerated Multidimensional Dynamic Time Warping)。此外,本文算法還與深度學(xué)習(xí)算法進(jìn)行對(duì)比,深度學(xué)習(xí)算法選擇LSTM以及BiLSTM。對(duì)比結(jié)果如表6所示,可以看出,MDTW雖然具有較高的識(shí)別精度,但運(yùn)行緩慢且需要完整時(shí)間序列,明顯不具備實(shí)時(shí)性;深度學(xué)習(xí)算法運(yùn)算速度較快,但識(shí)別精度較低且黑盒模型不具有可解釋性;本文算法在分類準(zhǔn)確率、精確率、召回率和F1-Score上均優(yōu)于其他算法的,且模型延遲率低、運(yùn)行時(shí)間短,具有較強(qiáng)的實(shí)時(shí)性。
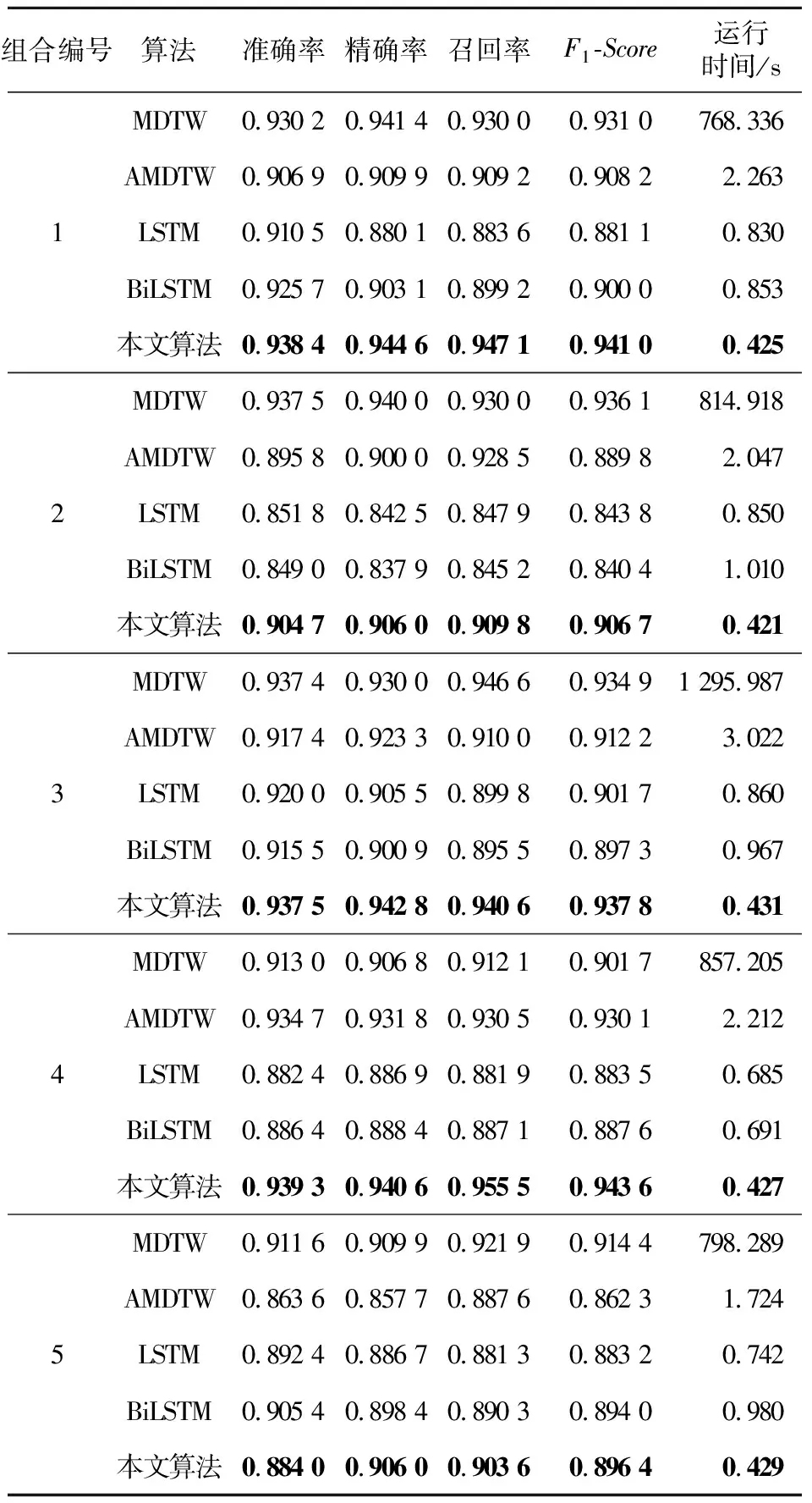
Table 6 Performance comparison of the proposed algorithmwith other time series algorithms
5 結(jié)束語
本文使用空戰(zhàn)中易于獲取到的敵機(jī)三維坐標(biāo)信息,設(shè)計(jì)基于早期時(shí)間序列分類的可解釋實(shí)時(shí)機(jī)動(dòng)識(shí)別算法,實(shí)時(shí)識(shí)別敵機(jī)執(zhí)行的機(jī)動(dòng)動(dòng)作。本文設(shè)計(jì)算法具有可解釋性,利用特征貢獻(xiàn)度對(duì)特征進(jìn)行分析,保證算法輸出結(jié)果讓算法使用者信任。本文算法在9種機(jī)動(dòng)的不同組合上準(zhǔn)確率達(dá)90%,識(shí)別時(shí)間僅為7 s,平均識(shí)別時(shí)間僅為完整機(jī)動(dòng)執(zhí)行時(shí)間的20%。總之,本文算法識(shí)別精度高、實(shí)時(shí)性強(qiáng)、可解釋性好,具有較高的實(shí)用價(jià)值。
相對(duì)于現(xiàn)有的機(jī)動(dòng)識(shí)別算法,此算法在預(yù)測(cè)實(shí)時(shí)性和可解釋性上有了較大的提高,但目前本文算法針對(duì)不同機(jī)動(dòng)的分類時(shí)間一致,未來應(yīng)該針對(duì)不同機(jī)動(dòng)的特點(diǎn)設(shè)計(jì)不同的分類時(shí)間,以期達(dá)到更高的實(shí)時(shí)性。此外,由于目前無法構(gòu)造滾轉(zhuǎn)角,導(dǎo)致機(jī)動(dòng)識(shí)別中對(duì)于橫滾類型的機(jī)動(dòng)識(shí)別效果不佳,后期需要挖掘出更多有利于機(jī)動(dòng)識(shí)別的特征。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
