基于傾角反演的隧道斷面變形全方位監(jiān)測方法
2024-03-01 08:08:32陳曉斌王風(fēng)棟吳夢黎王業(yè)順
關(guān)鍵詞:變形
陳曉斌,王風(fēng)棟,吳夢黎,王業(yè)順
(1.中南大學(xué) 土木工程學(xué)院,湖南 長沙,410082;2.重載鐵路工程結(jié)構(gòu)教育部重點(diǎn)實(shí)驗(yàn)室,湖南 長沙,410075)
隧道斷面變形是反映隧道健康狀況的關(guān)鍵因素[1-4]。傳統(tǒng)方法只在某一時(shí)刻記錄隧道斷面特定監(jiān)測點(diǎn)變形,很難準(zhǔn)確定位斷面危險(xiǎn)點(diǎn)位置并判別潛在的變形趨勢,難以滿足隧道健康狀況評估的需求[5-6]。為了實(shí)現(xiàn)整個(gè)隧道斷面的實(shí)時(shí)連續(xù)監(jiān)測,基于傾角傳感器和無線傳感網(wǎng)絡(luò)的隧道變形監(jiān)測方法成為當(dāng)前研究熱點(diǎn)[7-9]。20世紀(jì)90年代末便有學(xué)者利用傾角傳感器對隧道變形進(jìn)行監(jiān)測。BASSETT等[10]基于電解質(zhì)式傾角傳感器開發(fā)了巴塞特收斂系統(tǒng)(Bassett convergence system),并在倫敦地鐵有限公司運(yùn)營隧道中進(jìn)行了試驗(yàn)驗(yàn)證。該系統(tǒng)主要由若干個(gè)帶有傾角傳感器的觀測臂組成,使用時(shí),需將觀測臂首尾相連安裝到隧道斷面上。除此之外,ARIZNAVARRETA-FERNáNDEZ等[11]采用與巴塞特系統(tǒng)相似的原理開發(fā)了CANG(convergence by means of angular sensors)系統(tǒng),并在雙車道公路隧道中進(jìn)行了試運(yùn)行。隨著MEMS(micro-electro-mechanical system)技術(shù)和無線傳感網(wǎng)絡(luò)技術(shù)的發(fā)展,基于MEMS傾角傳感器和無線傳感網(wǎng)絡(luò)的新型監(jiān)測方法開始用于隧道變形監(jiān)測。BENNETT等[12]使用傾角傳感器和裂縫計(jì)對倫敦地鐵隧道變形進(jìn)行了長期監(jiān)測。WANG等[13-14]采用無線傾角傳感器對上海地鐵隧道的水平和縱向收斂變形進(jìn)行了監(jiān)測。LI等[15]在隧道斷面頂部布設(shè)傾角傳感器,監(jiān)測了縱向沉降。同時(shí),相關(guān)學(xué)者提出了多種基于傾角的變形計(jì)算方法。嵇中[16]假定隧道斷面變形為橢圓形,通過公式擬合的方法得到了盾構(gòu)隧道收斂變形的計(jì)算公式。HUANG等[17-18]通過定義“最優(yōu)測量點(diǎn)”,采用考慮管片變形的相對不轉(zhuǎn)動(dòng)點(diǎn)法對隧道收斂變形進(jìn)行計(jì)算。王明卓[19]通過建立數(shù)值模型,利用理論和數(shù)值擬合的方法建立了變形和傾角變化之間的關(guān)系。WANG等[5,14]則采用解析方法提出基于傾角傳感的盾構(gòu)隧道收斂計(jì)算方法,并利用誤差反演算法得到最優(yōu)安裝位置。
目前,提出的多種傾角-變形算法主要是用于計(jì)算特定監(jiān)測點(diǎn)變形,在準(zhǔn)確計(jì)算隧道斷面全方位變形(隧道斷面任意極角位置變形)方面還存在一些不足。巴塞特系統(tǒng)、CANG系統(tǒng)雖然可以實(shí)現(xiàn)全方位監(jiān)測,但需要大量的輔助設(shè)備,占用工作空間大,無法體現(xiàn)傾角傳感器體積小、易于安裝的優(yōu)勢。為了充分發(fā)揮傾角傳感器的優(yōu)勢,實(shí)現(xiàn)對隧道斷面全方位變形的實(shí)時(shí)連續(xù)監(jiān)測,本文提出一種新的基于傾角反演的隧道變形監(jiān)測方法,主要研究內(nèi)容包括:通過分析隧道變形與傾角之間的關(guān)系,推導(dǎo)隧道傾角-變形算法;開展傾角-變形算法誤差分析,增設(shè)假定約束條件,提出算法修正公式;建立三維有限差分?jǐn)?shù)值模型和室內(nèi)試驗(yàn)?zāi)P停ㄟ^數(shù)值模擬和室內(nèi)試驗(yàn)的方式驗(yàn)證算法的正確性,通過誤差分析討論其適應(yīng)性,為實(shí)際工程應(yīng)用提供依據(jù)和指導(dǎo)。
1 基于傾角的隧道變形算法
1.1 坐標(biāo)系選取
推導(dǎo)隧道傾角-變形算法時(shí),首先需要選取合適的坐標(biāo)系來定義隧道各點(diǎn)的坐標(biāo)信息。常見隧道結(jié)構(gòu)一般由仰拱和上部拱形結(jié)構(gòu)組成,兩者的輪廓曲線均呈弧形。隧道仰拱的主要作用是將上部荷載傳遞給下部土體,同時(shí)抵抗下部土體的隆起,在實(shí)際監(jiān)測中,一般較少對仰拱進(jìn)行監(jiān)測。因此,本文在研究隧道變形過程中也僅針對上部拱形結(jié)構(gòu)。同時(shí),考慮到隧道拱腳的變形較小,將上部拱形結(jié)構(gòu)兩底端近似看作固定約束[20]。
隧道上部拱形結(jié)構(gòu)的輪廓曲線上存在切線斜率無窮大的點(diǎn),即存在傾角為90°的點(diǎn)。當(dāng)選用常用的直角坐標(biāo)系定義位置時(shí),對斜率無窮大的點(diǎn)難以處理,同時(shí)也會存在同一x坐標(biāo)對應(yīng)多個(gè)y坐標(biāo)的問題即多值問題。為避免上述問題,采用極坐標(biāo)系來定義位置坐標(biāo)。如圖1所示,以2個(gè)拱腳連線的中點(diǎn)作為坐標(biāo)原點(diǎn),記為極點(diǎn)O,從極點(diǎn)向右側(cè)拱腳引出1條射線作為極軸,記為極軸OX,以逆時(shí)針旋轉(zhuǎn)為正,建立極坐標(biāo)系。隧道輪廓曲線上各點(diǎn)的位置坐標(biāo)可以用極角φ和與其對應(yīng)的極徑r唯一表示,記為P(φ,r)。

圖1 坐標(biāo)系選取示意圖Fig.1 Diagram of coordinate system selection
1.2 傾角-變形算法推導(dǎo)
采用極坐標(biāo)表示隧道各點(diǎn)的位置,此時(shí),隧道變形情況可以用各點(diǎn)的極徑變化量Δr表示,Δr越大,該點(diǎn)的變形量越大。利用傾角計(jì)算隧道變形時(shí),需要建立傾角與變形之間的關(guān)系,通過已知傾角推算與之唯一對應(yīng)的變形值,用數(shù)學(xué)表達(dá)式表示為
式中:θ為隧道監(jiān)測點(diǎn)的傾角;Δr為隧道監(jiān)測點(diǎn)的變形量。下面推導(dǎo)Δr與θ的具體關(guān)系式。
為了便于分析,將隧道輪廓曲線的極角區(qū)間分為n個(gè)小區(qū)間,取其中1個(gè)小區(qū)間進(jìn)行分析。隧道分段變形幾何關(guān)系如圖2所示。設(shè)曲線AB為第i個(gè)小區(qū)間[φi-1,φi]所對應(yīng)的曲線分段,曲線A′B′為對應(yīng)變形后的曲線分段。

圖2 隧道分段變形幾何關(guān)系Fig.2 Deformation geometry relationship of tunnel segments
Pi(φi,ri)和Pi-1(φi-1,ri-1)是曲線分段的端點(diǎn),對于變形前后的曲線分段,存在有函數(shù)關(guān)系Ri(φ)使得r=Ri(φ),φ?[φi-1,φi]始終成立。但Ri(φ)的具體表達(dá)式并不明確,可以基于曲線插值的思想,構(gòu)造插值函數(shù)ri(φ)近似代替Ri(φ),并使ri(φ)經(jīng)過端點(diǎn)Pi和Pi-1。任意曲線都可以構(gòu)造插值函數(shù)去近似代替實(shí)際曲線,各函數(shù)組成插值函數(shù)r(φ)?[0°,180°]。則隧道變形可以近似表示為
式中:Δr為隧道監(jiān)測點(diǎn)的變形量;r(φ)為變形后曲線的極徑;rc(φ)為曲線的初始極徑。
假設(shè)函數(shù)ri(φ)在區(qū)間[φi-1,φi]內(nèi)滿足二階連續(xù),即函數(shù)圖像為光滑連續(xù)的曲線。以多項(xiàng)式為基函數(shù)構(gòu)造ri(φ):
式中:aik為多項(xiàng)式的系數(shù)。式(3)的一階和二階導(dǎo)數(shù)r′i(φ)和r″i(φ)可以表示為:
如圖2所示第i個(gè)分段曲線,其極角區(qū)間為[φi-1,φi],為方便計(jì)算,不妨將原函數(shù)進(jìn)行平移,設(shè)變量s=φ-φi-1,同時(shí)令si=φi-φi-1,則平移后的函數(shù)區(qū)間變?yōu)閇0,si]。分段端點(diǎn)Pi和Pi-1的極徑為ri和ri-1,ri(φ)在端點(diǎn)的一階導(dǎo)數(shù)值用r′i和r′i-1表示,可以得到以下關(guān)系:
將式(3)、(4)、(6)聯(lián)立可以得到:
同理,對于相鄰的第i+1段曲線,可以構(gòu)造函數(shù)ri+1(φ),其中φ?[0,si+1]。2個(gè)函數(shù)在其區(qū)間內(nèi)均滿足二階連續(xù),則在端點(diǎn)處有
將式(8)與式(5)聯(lián)立并將式(7)代入得
式(9)是關(guān)于r、r′的方程,由于采用傾角θ進(jìn)行隧道變形監(jiān)測,隧道各點(diǎn)的r和r′為未知量,要求解式(9)需要建立傾角θ與r、r′的關(guān)系。
極坐標(biāo)系與直角坐標(biāo)系的轉(zhuǎn)換關(guān)系為
此時(shí),對于傾角θ,有
再由三角函數(shù)公式可得
將式(11)代入式(12)并化簡得
式(13)表征了傾角θ與r、r′的關(guān)系。將式(13)代入式(9)并化簡得
其中:
式(14)是關(guān)于r的方程組,求解前還需要2個(gè)邊界條件。設(shè)隧道2個(gè)拱腳滿足
式中:R0為隧道右側(cè)拱腳的極徑;Rn為隧道左側(cè)拱腳的極徑。R0與Rn為已知量,可以通過1次測量或者設(shè)計(jì)圖獲得。在將上部拱形結(jié)構(gòu)看作兩端固定約束的情況下,可以認(rèn)為R0與Rn為不變量。將式(15)與式(14)聯(lián)立為矩陣形式:
為表示方便,上式可以簡寫成
式中:A為系數(shù)矩陣,由隧道輪廓曲線各點(diǎn)的傾角θ求得;R為變量矩陣,是隧道各點(diǎn)極徑r組成的一維數(shù)組;B為結(jié)果矩陣。
式(17)是關(guān)于極徑r的方程組,根據(jù)矩陣的基本運(yùn)算法則可以求得變形后隧道各點(diǎn)的極徑:
同理,可以求得隧道初始極徑:
由此可以計(jì)算出隧道各點(diǎn)的變形量:
式中:ΔR為隧道各點(diǎn)變形量組成的一維數(shù)組。
式(20)即為傾角θ與隧道變形的關(guān)系,將實(shí)時(shí)獲得的隧道各監(jiān)測點(diǎn)的傾角代入式(20)便可以計(jì)算出隧道變形量。
將式(18)和式(19)求得的極徑代入式(7)可以得到系數(shù)ai1、ai2、ai3、ai4,將各系數(shù)代入式(3)可以得到隧道變形前后的隧道曲線rc(φ)和r(φ),再利用式(2)即可求得隧道斷面曲線任意極角位置的變形量Δr,從而實(shí)現(xiàn)對隧道上部拱形結(jié)構(gòu)的全方位變形監(jiān)測。
1.3 監(jiān)測點(diǎn)極角修正
在實(shí)際應(yīng)用中,為考慮成本,一般使用便攜式小型傾角傳感器對隧道若干個(gè)監(jiān)測點(diǎn)傾角進(jìn)行監(jiān)測,這可能造成計(jì)算誤差。計(jì)算誤差一方面來源于傾角傳感器本身結(jié)構(gòu),其輸出的傾角是傳感器所在直線的傾角,與實(shí)際監(jiān)測點(diǎn)的傾角之間存在一定誤差。但傾角傳感器的長度一般為10~20 cm,相對于隧道周長,傳感器長度小,因而這類誤差影響較小。另一方面,在隧道變形過程中,傳感器伴隨隧道一起發(fā)生位置變動(dòng),但由于隧道各點(diǎn)的位移方向并非均指向極點(diǎn),會促使變形前后的監(jiān)測點(diǎn)極角發(fā)生變化,如圖3所示。
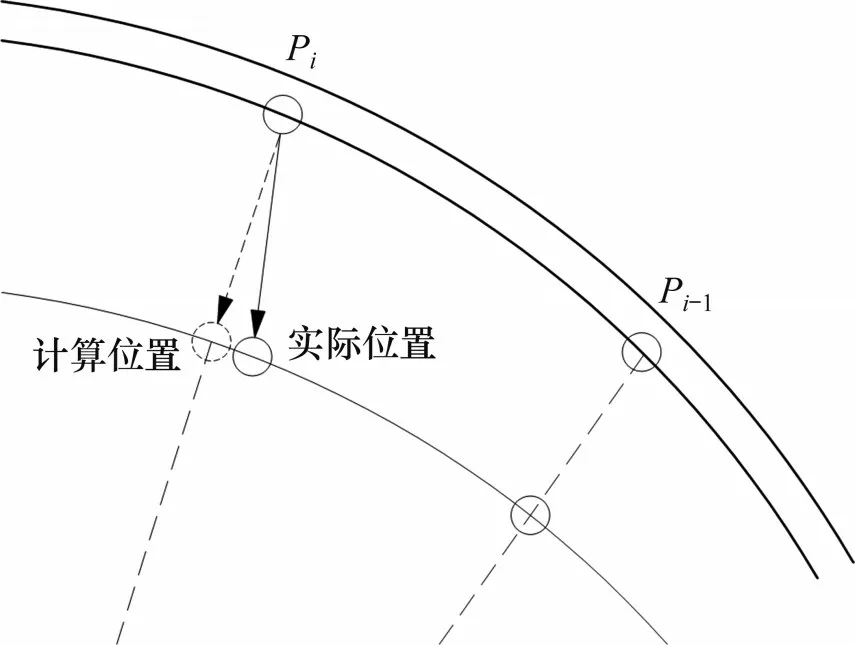
圖3 監(jiān)測點(diǎn)位置變動(dòng)示意圖Fig.3 Diagram of location change of the monitoring point
而在計(jì)算過程中,若仍然使用初始極角進(jìn)行計(jì)算,則很有可能產(chǎn)生較大的計(jì)算誤差,同時(shí),由于每個(gè)監(jiān)測點(diǎn)的極角均會發(fā)生變化,還會造成累計(jì)誤差。
為了減小傾角-變形算法在有限監(jiān)測點(diǎn)下的計(jì)算誤差,可以通過補(bǔ)充假設(shè)和約束條件的方式對隧道變形后的極角進(jìn)行修正,并將修正后的極角重新代入傾角-變形算法,從而改進(jìn)算法的計(jì)算結(jié)果。
根據(jù)隧道變形前后的形狀特點(diǎn),補(bǔ)充假設(shè)條件:隧道變形前后相鄰2個(gè)傳感器間的弧長相對于總弧長的比例不變。令變形前隧道上部拱形結(jié)構(gòu)總弧長和相鄰2個(gè)傳感器間的分段弧長分別為s、li,變形后為s′、li′,則補(bǔ)充的假設(shè)條件可以用數(shù)學(xué)表達(dá)式表示為
根據(jù)極坐標(biāo)下的弧長積分公式可以得到
式中:Φi為修正后的傾角。通過補(bǔ)充假設(shè)條件,利用式(21)和式(22)即可實(shí)現(xiàn)對傾角-變形算法計(jì)算結(jié)果的修正。
2 有限差分算例
2.1 有限差分模型建立
以某隧道斷面設(shè)計(jì)為參考,建立Flac 3D數(shù)值模型,如圖4所示(其中,R為半徑)。斷面形狀為三心圓,半徑分別為R1=5.7 m,R2=R3=8.2 m,|下側(cè)角度α=12°,厚度為0.35 m,底部固定約束。采用彈性本構(gòu)模型,C25混凝土力學(xué)參數(shù)選取如表1所示。

表1 C25混凝土物理力學(xué)參數(shù)Table 1 Mechanical parameters of numerical model of C25 concrete

圖4 隧道數(shù)值模型Fig.4 Tunnel numerical model
傾角傳感器通過梁結(jié)構(gòu)單元模擬。梁結(jié)構(gòu)單元兩端采用固定鏈接,當(dāng)模型發(fā)生變形時(shí),結(jié)構(gòu)單元位置隨之產(chǎn)生相應(yīng)變動(dòng)。輸出結(jié)構(gòu)單元端點(diǎn)的x、y坐標(biāo),則隧道變形前后結(jié)構(gòu)單元的傾角可以按下式計(jì)算:
式中:θ和θ′分別為變形前后結(jié)構(gòu)單元的傾角;(x1,y1)和(x2,y2)分別為變形前結(jié)構(gòu)單元端點(diǎn)坐標(biāo);(x1′,y1′)和(x2′,y2′)分別為變形后結(jié)構(gòu)單元端點(diǎn)坐標(biāo);Δθ為傾角變化量。
2.2 計(jì)算結(jié)果分析
在隧道模型內(nèi)側(cè)對稱設(shè)置10個(gè)結(jié)構(gòu)單元,以傳感器所在位置為邊界劃分出9個(gè)極角區(qū)間,在隧道模型上施加1×104kN·m-2的法向均布荷載,隧道發(fā)生變形,待變形穩(wěn)定后輸出隧道的位移云圖,如圖5(a)所示。輸出結(jié)構(gòu)單元的端點(diǎn)坐標(biāo)并計(jì)算傾角,在不進(jìn)行極角修正的情況下,使用推導(dǎo)的傾角-變形算法計(jì)算得到隧道各點(diǎn)的極徑變化量Δr,并將其與數(shù)值模擬值進(jìn)行對比,如圖5(b)所示。

圖5 均布荷載下隧道變形計(jì)算結(jié)果Fig.5 Deformation results of tunnel under uniform load
從圖5(b)可以看出:算法計(jì)算得到的隧道變形量在極角90°位置最大,向兩端逐漸減小,這與數(shù)值模擬結(jié)果基本相同。但未經(jīng)極角修正情況下的計(jì)算結(jié)果與模擬值相比存在明顯誤差,不符合監(jiān)測需求。
使用1.3節(jié)所述極角修正方法對算例的計(jì)算結(jié)果進(jìn)行修正,得到結(jié)果如圖6所示。從圖6可以看出:修正后的計(jì)算誤差相比于修正前明顯減小,且僅需2次迭代修正,計(jì)算結(jié)果便與數(shù)值模擬結(jié)果基本吻合。

圖6 經(jīng)過迭代修正后的極徑變化量計(jì)算結(jié)果Fig.6 Deformation results after iterative correction
為了進(jìn)一步量化評價(jià)算法的計(jì)算誤差,采用最大絕對誤差和平均相對誤差這2個(gè)評價(jià)指標(biāo)對計(jì)算結(jié)果進(jìn)行評價(jià)。用Δr(φ)表示算法計(jì)算得到的隧道變形量,ΔR(φ)表示數(shù)值模擬得到的理論變形量,則最大絕對誤差和平均相對誤差可以表示為:
式中:Emax為最大絕對誤差;δ為平均相對誤差。
但實(shí)際計(jì)算中Δr(φ)與ΔR(φ)往往較復(fù)雜,難以進(jìn)行積分運(yùn)算。為了計(jì)算方便,可以選取曲線上的若干點(diǎn),采用離散的方法來近似求得平均相對誤差,即
將計(jì)算結(jié)果與數(shù)值模擬結(jié)果代入式(26),得到不同迭代修正次數(shù)下隧道變形計(jì)算的平均相對誤差,如圖7所示。從圖7可以看出:隨著迭代修正次數(shù)增加,誤差逐漸減小并最終趨于穩(wěn)定,穩(wěn)定后隧道變形計(jì)算平均相對誤差為3.64%(低于5%),同時(shí),計(jì)算出穩(wěn)定后隧道變形計(jì)算的最大絕對誤差為0.178 mm,證明了傾角-變形算法的準(zhǔn)確性。在實(shí)際使用中,為了保證計(jì)算結(jié)果準(zhǔn)確性,應(yīng)按照修正方法進(jìn)行至少3次迭代修正。此外,在修正過程中只對傳感器極角進(jìn)行修正,沒有改變傳感器的傾角輸出值,也驗(yàn)證了1.3節(jié)中極角修正假設(shè)的正確性。

圖7 不同修正次數(shù)下的隧道變形計(jì)算平均相對誤差Fig.7 Average relative errors of tunnel depormation caculation in different correction times
3 傾角-變形算法適應(yīng)性分析
算例模型的荷載形式為對稱均布荷載,但在實(shí)際隧道工程中,隧道斷面所受荷載形式可能更加復(fù)雜,因此,需要驗(yàn)證傾角-變形算法在不同工況下的適應(yīng)性。隧道所受荷載類型可以大致分為均布荷載、對稱非均布荷載和非對稱荷載[21]3種形式。這里采用第2節(jié)有限差分隧道模型模擬對稱非均布荷載和非對稱荷載這2種工況。
3.1 對稱非均布荷載工況模擬
對于對稱非均布荷載工況,在原有1×104kN·m-2均布荷載的基礎(chǔ)上增加0.1×104kN·m-2中間荷載,以此模擬非均布荷載類型。隧道模型參數(shù)和傳感器位置與均布荷載工況保持一致,最終得到該工況下的隧道位移云圖如圖8(a)所示,可以看出,由于施加了額外荷載,隧道的變形與均布荷載下有明顯不同,整體呈豎向壓扁形式。

圖8 對稱非均布荷載下隧道變形計(jì)算結(jié)果Fig.8 Deformation results of tunnel under symmetrical non-uniform load
輸出傳感器的傾角,代入傾角-變形算法,同樣進(jìn)行3次迭代修正,得到隧道各點(diǎn)的變形量Δr,并繪制出極徑變化量Δr與極角的關(guān)系曲線,如圖8(b)所示。從圖8(b)可以看出:對稱非均布荷載工況下算法極徑變化量計(jì)算值與數(shù)值模擬值基本一致,代入式(22)與式(24)計(jì)算得到當(dāng)前工況下隧道變形的最大絕對誤差為0.424 mm,平均相對誤差為6.07%,計(jì)算誤差較小。
3.2 非對稱荷載工況模擬
在1×104kN·m-2均布荷載的基礎(chǔ)上,通過在模型右側(cè)增加0.05×104kN·m-2荷載的方式模擬非對稱荷載,變形穩(wěn)定后輸出隧道位移云圖如圖9(a)所示。將傳感器傾角代入傾角-變形算法,繪制非對稱荷載工況下Δr與極角的關(guān)系曲線,如圖9(b)所示。從圖9可見:在該工況下,算法計(jì)算的隧道變形最大絕對誤差為0.706 mm,平均相對誤差為4.95%,說明傾角-變形算法在非對稱荷載工況下同樣具有較好的適應(yīng)性。

圖9 非對稱荷載下隧道變形計(jì)算結(jié)果Fig.9 Deformation results of tunnel under asymmetric load
通過分析上述3種工況可知:算法在不同工況下的測量精度有所不同,其中,均布荷載工況的計(jì)算誤差最小,最大絕對誤差僅為0.178 mm,平均相對誤差僅為3.66%;非均布荷載算法的計(jì)算誤差較大;從整體平均誤差看,對稱非均布荷載工況下的平均相對誤差最大,為6.07%;從局部監(jiān)測點(diǎn)的最大誤差角度看,非對稱荷載工況下的誤差最大,為0.706 mm。雖然算法在不同工況下的誤差不盡相同,但都保持在較低值,最大絕對誤差均不超過1 mm,平均相對誤差小于7%。
4 試驗(yàn)驗(yàn)證
通過有限差分算例分析算法自身誤差后,這里采用室內(nèi)試驗(yàn)方式驗(yàn)證算法在實(shí)際使用過程中隧道變形監(jiān)測的準(zhǔn)確性。
4.1 試驗(yàn)設(shè)計(jì)
室內(nèi)試驗(yàn)設(shè)計(jì)如圖10(a)所示。模型尺寸參考第2.1節(jié)中數(shù)值模型尺寸進(jìn)行縮尺設(shè)計(jì),縮尺比為1:5。縮尺后隧道高為1.48 m,最大寬度為2.28 m。由于所用傾角-變形算法與隧道自身的材料性質(zhì)無關(guān),同時(shí),為簡化試驗(yàn)過程,試驗(yàn)?zāi)P筒捎?0 mm普通螺紋鋼筋及5 mm鋼板拼接而成,如圖10(b)所示。在模型內(nèi)側(cè)預(yù)留有10個(gè)監(jiān)測點(diǎn)位,用于安裝傾角傳感器(C1、C2、…、C10為傳感器編號)。
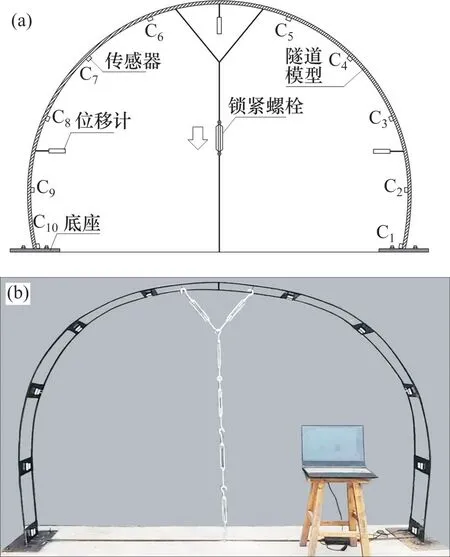
圖10 室內(nèi)模型試驗(yàn)Fig.10 Indoor model test
試驗(yàn)以鎖緊螺栓作為加載裝置,通過對模型施加豎直或水平方向上的拉力使其發(fā)生變形,模擬隧道拱頂沉降和水平收斂。加載通過變形控制,共設(shè)置10個(gè)加載等級,控制模型變形從0 mm逐級增大到50 mm,試驗(yàn)時(shí),緩慢加載以保證傳感器測量準(zhǔn)確。受試驗(yàn)條件限制,模型試驗(yàn)無法像數(shù)值模擬一樣輸出隧道所有極角位置的實(shí)際變形,因此,僅對2個(gè)具有代表性的隧道變形指標(biāo)進(jìn)行實(shí)際監(jiān)測。選取隧道拱頂沉降和水平收斂[22-23]作為監(jiān)測指標(biāo),將3個(gè)位移計(jì)分別設(shè)置于模型的拱頂和拱腰位置,3個(gè)位移測點(diǎn)記為W1、W2和W3,記錄試驗(yàn)過程中模型豎直和水平方向上的位移,其中,拱頂沉降通過位移計(jì)直接讀取,水平收斂則通過讀取水平方向上的2個(gè)位移相加獲得。
傳感器的布置如圖10(a)所示。以右側(cè)拱腳為起始點(diǎn)在模型內(nèi)側(cè)設(shè)置10個(gè)傳感器,依次編號為C1~C10。起始監(jiān)測點(diǎn)對應(yīng)的極角為0°,末尾對應(yīng)極角180°,兩側(cè)監(jiān)測點(diǎn)基本呈對稱布置,記錄試驗(yàn)過程中各監(jiān)測點(diǎn)產(chǎn)生的傾角。
4.2 試驗(yàn)結(jié)果與分析
圖11所示為試驗(yàn)加載過程中各傾角傳感器的傾角變化量。由于模型結(jié)構(gòu)和加載基本對稱,故所得傾角變化也基本對稱,其中傳感器C4、C5、C6和C7處的傾角變化呈減小趨勢,傳感器C1、C2、C9和C10處的傾角變化呈增大趨勢,傳感器C3與C8處的傾角變化不明顯,且拱頂附近傾角變化比拱腳處的傾角變化大。根據(jù)加載方式,可以初步判斷傾角傳感器的測量趨勢正確。

圖11 不同加載等級下傳感器傾角變化量Fig.11 Variation of inclination under different loading levels
將傳感器所測結(jié)果代入傾角-變形算法計(jì)算位移測點(diǎn)W1、W2和W3在極坐標(biāo)下的變形量,分別記為Δr1、Δr2和Δr3。為了能與位移計(jì)所測位移相比較,利用極坐標(biāo)與直角坐標(biāo)的轉(zhuǎn)換關(guān)系對所得Δr1、Δr2和Δr3進(jìn)行直角坐標(biāo)轉(zhuǎn)換,轉(zhuǎn)換關(guān)系為
式中:Δxi和Δyi分別為測點(diǎn)i在直角坐標(biāo)系x和y方向上的位移,mm;Δri為測點(diǎn)i在極坐標(biāo)下的變形量,mm;φi為測點(diǎn)i所在極角。
利用式(27)計(jì)算得到3個(gè)位移測點(diǎn)在直角坐標(biāo)系下的位移,其中,Δy2為隧道模型的拱頂沉降,Δx1與Δx2的和為隧道的水平收斂。將得到的拱頂沉降和水平收斂與位移計(jì)所測的實(shí)際值進(jìn)行比較,如圖12所示。

圖12 隧道模型變形監(jiān)測結(jié)果Fig.12 Monitoring results of tunnel deformation
從圖12可以看出:利用本文方法得到的拱頂沉降和水平收斂與實(shí)際結(jié)果接近,可以正確反映試驗(yàn)過程中測點(diǎn)的位移變化趨勢。拱頂沉降的平均測量誤差為7.34%(小于8%),水平收斂的平均測量誤差為4.10%(小于5%)。由于傳感器測量誤差的存在,試驗(yàn)誤差比數(shù)值模擬誤差大,但仍較小。
5 結(jié)論
1) 通過設(shè)立合適的坐標(biāo)系和假設(shè)條件,隧道變形與傾角之間可以建立數(shù)學(xué)關(guān)系,并據(jù)此可得到隧道傾角-變形計(jì)算方法。
2) 監(jiān)測點(diǎn)的極角隨隧道變形而改變,直接影響傾角-變形算法計(jì)算精度。假定隧道變形前后相鄰2個(gè)傳感器間弧長與總弧長的比例不變,修正極角,則只需2次迭代修正,即可將計(jì)算誤差降低到5%以下。
3) 隧道傾角-變形算法在均布荷載、對稱非均布荷載和非對稱荷載等工況中均具有良好的適應(yīng)性和較高的準(zhǔn)確性,其最大絕對誤差小于1 mm,平均相對誤差小于7%。
4) 即使存在傳感器測量誤差,隧道傾角-變形算法仍具有較高的監(jiān)測精度,豎向拱頂沉降監(jiān)測誤差小于8%,水平收斂監(jiān)測誤差小于5%。
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36