永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法
2024-03-03 03:05:50楊智玲
綿陽師范學(xué)院學(xué)報(bào) 2024年2期
程 瑋,楊智玲
(1.廈門市智慧漁業(yè)重點(diǎn)實(shí)驗(yàn)室,福建廈門 361100;2.廈門海洋職業(yè)技術(shù)學(xué)院海洋機(jī)電學(xué)院,福建廈門 361100)
0 引言
近年來,隨著稀土資源的開發(fā)與利用,獲得新型永磁材料,永磁同步電機(jī)逐漸得到應(yīng)用.相比于傳統(tǒng)電機(jī),永磁同步電機(jī)由永磁體提供勵(lì)磁,使得電機(jī)的結(jié)構(gòu)更為簡單.為了使永磁同步電機(jī)運(yùn)行更加精準(zhǔn),設(shè)計(jì)了變頻調(diào)速系統(tǒng)對(duì)其進(jìn)行控制.然而,系統(tǒng)中存在的耦合關(guān)系會(huì)導(dǎo)致系統(tǒng)難以控制,性能較差.在這樣的情況下,就需要對(duì)永磁同步電機(jī)的變頻調(diào)速系統(tǒng)進(jìn)行解耦控制,以提高系統(tǒng)性能.對(duì)此,很多研究人員提出了解耦控制方法.
文獻(xiàn)[1]建立單相并網(wǎng)變換器數(shù)學(xué)模型,利用基爾霍夫電壓定律計(jì)算交流側(cè)電路的電壓平衡方程,對(duì)電壓電流對(duì)應(yīng)的正交分量進(jìn)行虛構(gòu)處理,獲得坐標(biāo)系下的數(shù)學(xué)模型,添加自由度實(shí)現(xiàn)矢量控制,利用SOGI算法的鎖相環(huán)應(yīng)對(duì)系統(tǒng)中的諧波影響,通過將實(shí)際的物理量進(jìn)行1/4周期延時(shí),對(duì)物理量的波動(dòng)進(jìn)行響應(yīng),提升動(dòng)態(tài)響應(yīng)特性,根據(jù)瞬時(shí)功率理論,計(jì)算靜止坐標(biāo)系下的表達(dá)式,實(shí)現(xiàn)系統(tǒng)的解耦控制.實(shí)驗(yàn)結(jié)果表明該方法通用性較差.文獻(xiàn)[2]針對(duì)系統(tǒng)中含有多個(gè)回路的情況,建立回路增益相對(duì)矩陣,對(duì)回路之間產(chǎn)生的耦合現(xiàn)象進(jìn)行解耦,通過倍數(shù)放大耦合關(guān)系,求解增益信號(hào),在傳遞函數(shù)中處理靜態(tài)信號(hào),轉(zhuǎn)換獲取回路的變量耦合方式,傳遞各回路的通量信息,基于相對(duì)矩陣對(duì)角理論推導(dǎo)耦合方式,利用誤差校正規(guī)則對(duì)系統(tǒng)中的信號(hào)進(jìn)行補(bǔ)償,完成系統(tǒng)的解耦控制.實(shí)驗(yàn)結(jié)果表明該方法控制時(shí)延較高.文獻(xiàn)[3]建立線性變參數(shù)模型,利用該模型對(duì)流量和壓力的關(guān)系進(jìn)行表達(dá),通過線性二次型調(diào)節(jié)器分析狀態(tài)反饋信息,獲得增益值,采用滑膜觀測(cè)器設(shè)計(jì)控制方案,將其與狀態(tài)反饋控制器相結(jié)合,完成系統(tǒng)的解耦控制.實(shí)驗(yàn)結(jié)果表明該方法解耦控制精度不高.
考慮到上述文獻(xiàn)提出的系統(tǒng)解耦控制方法無法滿足當(dāng)前永磁同步電機(jī)變頻調(diào)速系統(tǒng)的實(shí)際應(yīng)用控制需求,本研究以常規(guī)的永磁同步電機(jī)變頻調(diào)速系統(tǒng)為研究對(duì)象,提出一種永磁同步電機(jī)變頻調(diào)速系統(tǒng)的動(dòng)態(tài)解耦控制方法.在建立的系統(tǒng)數(shù)學(xué)模型下獲取解耦控制信號(hào),并通過加權(quán)修正對(duì)該信號(hào)進(jìn)行優(yōu)化處理,以此生成動(dòng)態(tài)解耦控制信號(hào),實(shí)現(xiàn)穩(wěn)定性較高的動(dòng)態(tài)解耦控制結(jié)果.
1 永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法設(shè)計(jì)
1.1 建立變頻調(diào)速系統(tǒng)數(shù)學(xué)模型
永磁同步電機(jī)變頻調(diào)速系統(tǒng)有著多種工作狀態(tài),在不同的工作狀態(tài)下,該系統(tǒng)呈現(xiàn)不同的電壓值,如圖1 所示[4].圖1中,α和β分別表示電壓的矢量坐標(biāo).U1~U7則分別表示不同工作狀態(tài)下的電壓.其中:
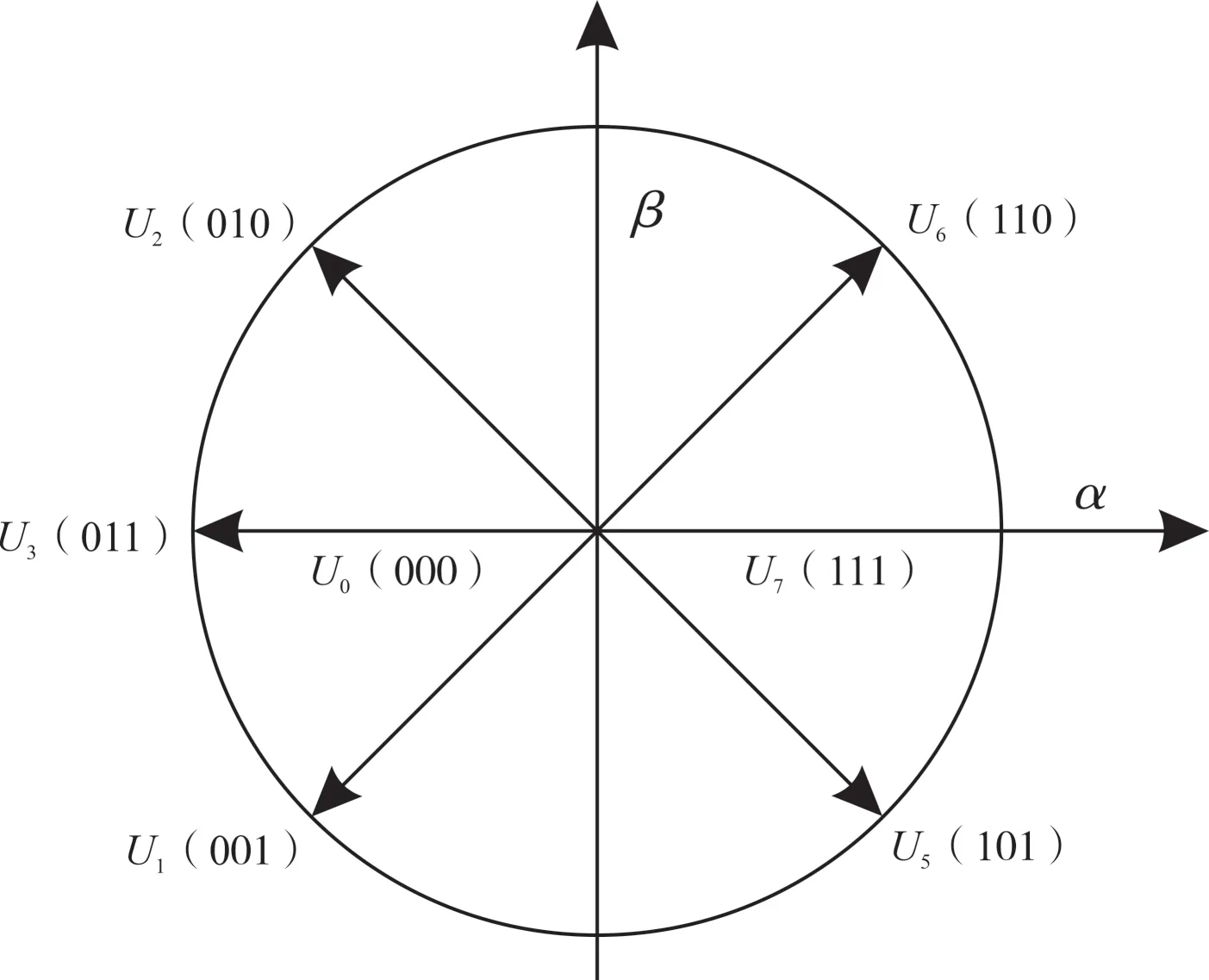
圖1 系統(tǒng)電壓標(biāo)量圖Fig.1 System voltage scalar diagram
U(0000):表示三相電壓都為零,此時(shí)沒有電壓施加到電機(jī)上.
U(1001):表示A相電壓保持不變,B相電壓減小,C相電壓保持不變.
U(2010):表示A相電壓保持不變,B相電壓保持不變,C相電壓減小.
U(3011):表示A相電壓保持不變,B相電壓減小,C相電壓減小.
U(5101):表示A相電壓減小,B相電壓保持不變,C相電壓減小.
U(6110):表示A相電壓減小,B相電壓減小,C相電壓保持不變.
U(7111):表示A相電壓減小,B相電壓減小,C相電壓減小.
根據(jù)圖1,建立永磁同步電機(jī)變頻調(diào)速系統(tǒng)的電路模型,如圖2所示.
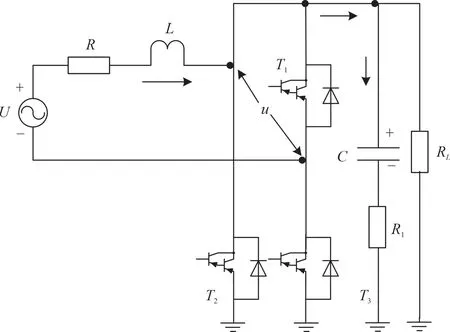
圖2 永磁同步電機(jī)變頻調(diào)速系統(tǒng)電路模型Fig.2 Circuit Model of Permanent Magnet Synchronous Motor Variable Frequency Speed Control System
圖2 中,U表示初始電壓,u表示不同工作狀態(tài)的變換電壓,R表示濾波電感等效電阻,T1、T2和T3分別表示內(nèi)絕緣柵雙極型晶體管,該晶體管包含一個(gè)并聯(lián)的有續(xù)流二極管,L表示交流側(cè)濾波電感,C表示連接的電源,RL表示直流側(cè)負(fù)載電阻,箭頭為電流流動(dòng)方向.
采用基爾霍夫電壓定律對(duì)該電路模型的電壓平衡進(jìn)行計(jì)算,如式(1)所示[5].
式中,d表示電壓平衡狀態(tài),I表示電流.
為該系統(tǒng)模型添加自由度,建立靜止坐標(biāo)系下的系統(tǒng)數(shù)學(xué)模型[6].自由度的計(jì)算如式(2)所示.
式中,s表示需要添加的自由度值.
基于式(2)的計(jì)算結(jié)果,建立系統(tǒng)數(shù)學(xué)模型,如式(3)所示.
式中,S表示靜止坐標(biāo)系下系統(tǒng)數(shù)學(xué)模型,uα和iα分別表示α軸上的電壓與電流,uβ和iβ則表示β軸上的電壓與電流,ω表示軸分量.
通過上述計(jì)算,獲得α、β軸靜止坐標(biāo)系下的永磁同步電機(jī)變頻調(diào)速系統(tǒng)模型.
1.2 分離系統(tǒng)模式系數(shù)獲取控制信號(hào)
在建立的永磁同步電機(jī)變頻調(diào)速系統(tǒng)數(shù)學(xué)模型中,將模型的系統(tǒng)模式系數(shù)分離出來.本研究采用限定項(xiàng)法完成這一步驟[7].首先,重構(gòu)出待校正的模式系數(shù),并對(duì)其進(jìn)行分解處理.記錄模式系數(shù)與斜率之間的關(guān)系矩陣為Z,兩者之間的關(guān)系表達(dá)如式(4)所示.
式中,g表示數(shù)學(xué)模型的斜率信息,該信息通過哈特曼測(cè)量方法所得,a表示數(shù)學(xué)模型的模式系數(shù).
加入相位補(bǔ)償量,結(jié)合變頻調(diào)速系統(tǒng)的驅(qū)動(dòng)影響,得出該數(shù)學(xué)模型的模式系數(shù)矩陣,如式(5)所示[8].
式中,K表示模式系數(shù)矩陣,k表示校正量,j表示模式系數(shù)的階次,Zj則表示在第j階的關(guān)系矩陣.
將得到的模式系數(shù)矩陣進(jìn)行擴(kuò)展,得到變頻調(diào)速系統(tǒng)解耦控制的響應(yīng)矩陣,如式(6)所示.
式中,Rm表示響應(yīng)矩陣,K′表示考慮響應(yīng)時(shí)延后的模式系數(shù)矩陣.
采用求廣義逆的方式處理式(6)的計(jì)算結(jié)果,如式(7)所示[9].
式中,t表示動(dòng)態(tài)解耦控制的時(shí)間,vt表示在不同時(shí)間點(diǎn)下,對(duì)永磁同步電機(jī)變頻調(diào)速系統(tǒng)進(jìn)行動(dòng)態(tài)解耦控制所需的控制信號(hào).
通過上述處理,得到永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制過程中的控制信號(hào).
1.3 優(yōu)化處理動(dòng)態(tài)解耦控制信號(hào)
利用上述得到的控制信號(hào),建立多變量的動(dòng)態(tài)矩陣進(jìn)行解耦控制.本研究采用DMC 算法完成這一步驟[10].首先,測(cè)定控制信號(hào)中的階躍響應(yīng)采樣值,建立動(dòng)態(tài)解耦控制的預(yù)測(cè)模型,如式(8)所示.
式中,y(t)表示在t時(shí)刻的預(yù)測(cè)值(t)表示在t時(shí)刻的初始預(yù)測(cè)值,B表示由階躍響應(yīng)系數(shù)構(gòu)成的矩陣,ΔM表示優(yōu)化變量.
為未來動(dòng)態(tài)解耦控制時(shí)刻輸出期望值,以此反映不同的重視程度,防止對(duì)永磁同步電機(jī)變頻調(diào)速系統(tǒng)的解耦控制量出現(xiàn)較大幅度的變化[11].
基于輸出的期望值,計(jì)算在t+1時(shí)刻的動(dòng)態(tài)解耦控制預(yù)測(cè)輸出誤差,如式(9)所示.
式中,et+1表示預(yù)測(cè)輸出誤差.
通過式(9)的計(jì)算結(jié)果,判定該動(dòng)態(tài)解耦控制信號(hào)是否為漸進(jìn)穩(wěn)定的線性對(duì)象[12].判定結(jié)果為“否”,則需要進(jìn)行線性化處理,判定結(jié)果為“是”,則利用計(jì)算得到的預(yù)測(cè)輸出誤差對(duì)動(dòng)態(tài)解耦控制量進(jìn)行加權(quán)修正處理,如式(10)所示.
式中,y表示修正后的解耦控制量預(yù)測(cè)值,h表示修正向量.
將修正后的預(yù)測(cè)值進(jìn)行移位優(yōu)化計(jì)算,結(jié)合修正反饋信號(hào),對(duì)動(dòng)態(tài)解耦控制的信號(hào)進(jìn)行滾動(dòng)優(yōu)化[13].這一過程需要在永磁同步電機(jī)變頻調(diào)速系統(tǒng)在線運(yùn)行的過程中進(jìn)行,完成動(dòng)態(tài)解耦控制信號(hào)的優(yōu)化處理.
1.4 有功-無功動(dòng)態(tài)解耦控制
基于永磁同步電機(jī)變頻調(diào)速系統(tǒng)有功狀態(tài)與無功狀態(tài)的特性,將動(dòng)態(tài)解耦控制信號(hào)進(jìn)行分化處理,分離有功與無功的動(dòng)態(tài)解耦控制信號(hào)[14].測(cè)量系統(tǒng)中的瞬時(shí)無功波動(dòng)值,根據(jù)波動(dòng)值的大小將動(dòng)態(tài)解耦控制信號(hào)分離為兩個(gè)框架,如圖3所示.
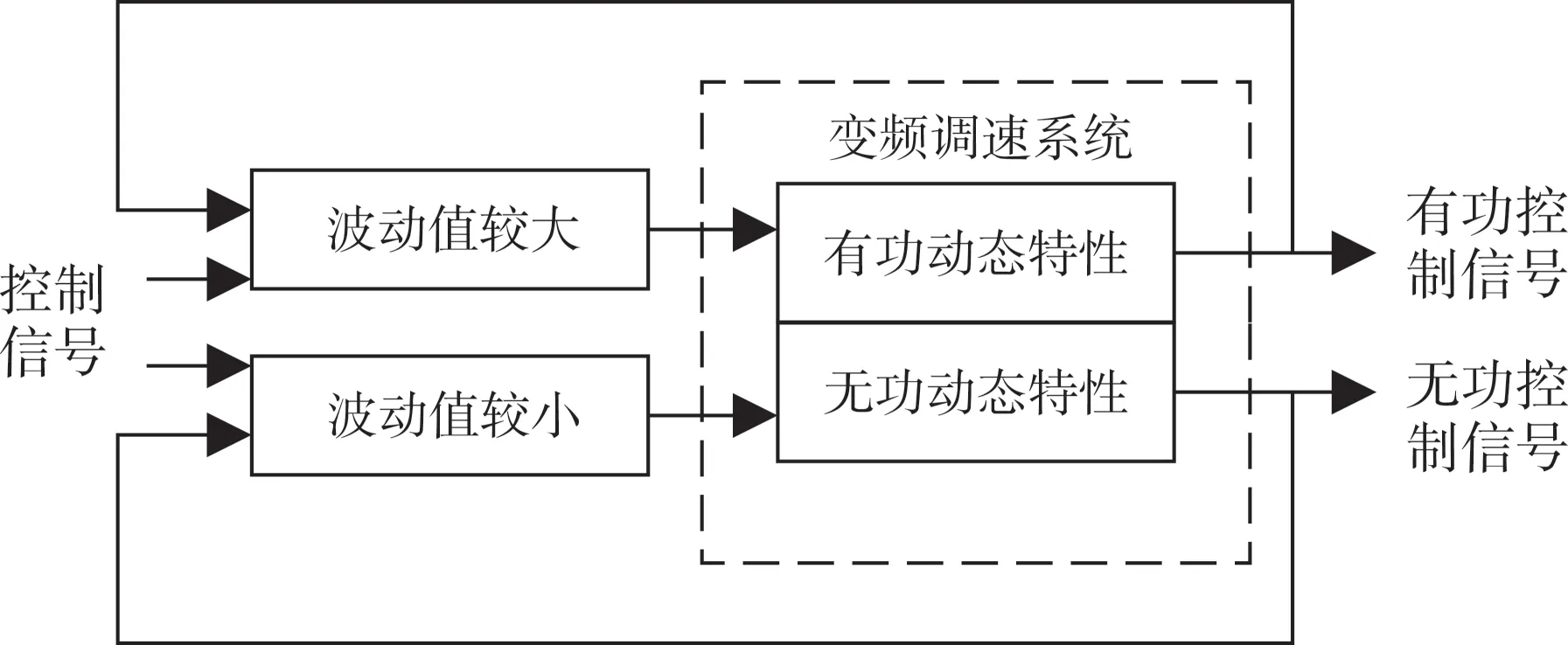
圖3 動(dòng)態(tài)解耦控制信號(hào)分離框架Fig.3 Dynamic decoupling control signal separation framework
通過如圖3所示的信號(hào)分離過程,獲得系統(tǒng)有功與無功狀態(tài)下的動(dòng)態(tài)解耦控制信號(hào).在分離的過程中,瞬時(shí)無功波動(dòng)值較大的系統(tǒng)內(nèi)需要并聯(lián)一個(gè)濾波器,如圖4所示.
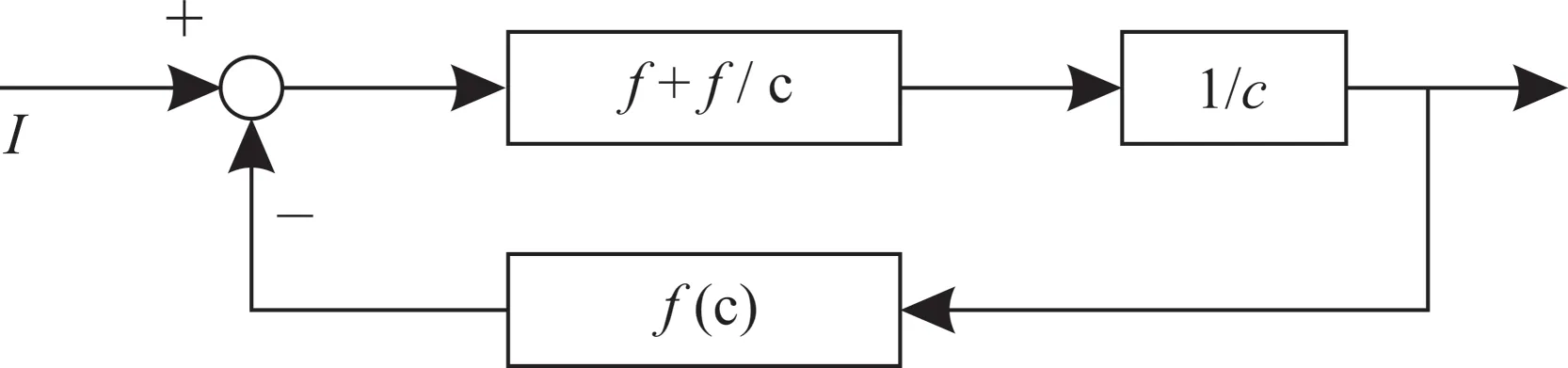
圖4 濾波器連接示意圖Fig.4 Filter connection diagram
圖4 中,c表示控制參數(shù),f表示電容電壓直流分量的平均值,f(c)表示濾波器諧波含量.
在本研究中,波動(dòng)值較大與較小的區(qū)分值設(shè)定為0.9[15].為了實(shí)現(xiàn)系統(tǒng)動(dòng)態(tài)解耦控制的無靜差控制,需要在變頻調(diào)速系統(tǒng)呈現(xiàn)無功狀態(tài)時(shí),設(shè)定參考值,如式(11)所示.
式中,qmax與qmin分別表示在系統(tǒng)運(yùn)行最大電流Imax與系統(tǒng)運(yùn)行最小電流Imin的參考值.
為了避免永磁同步電機(jī)變頻調(diào)速系統(tǒng)運(yùn)行過程中可能產(chǎn)生的故障對(duì)動(dòng)態(tài)解耦控制效果的影響,在有功與無功兩種狀態(tài)下,均需要留有解耦控制裕量,以實(shí)現(xiàn)較為精準(zhǔn)的動(dòng)態(tài)解耦控制.裕量通過相角差和確定,與其保持一致.
通過上述步驟,完成對(duì)永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦方法的設(shè)計(jì).
2 實(shí)驗(yàn)
2.1 實(shí)驗(yàn)準(zhǔn)備
為了驗(yàn)證本研究所提方法的可行性,設(shè)計(jì)實(shí)驗(yàn),從實(shí)驗(yàn)的研究結(jié)果驗(yàn)證所提方法的有效性.本次實(shí)驗(yàn)采用1.6 kW 三相 220 V 正弦波永磁同步電機(jī)作為被控電機(jī),該電機(jī)的參數(shù)值如表1所示.

表1 永磁同步電機(jī)參數(shù)Tab.1 Parameters of permanent magnet synchronous motor
根據(jù)表1 所示參數(shù)對(duì)變頻調(diào)速系統(tǒng)進(jìn)行設(shè)置,如表2所示.
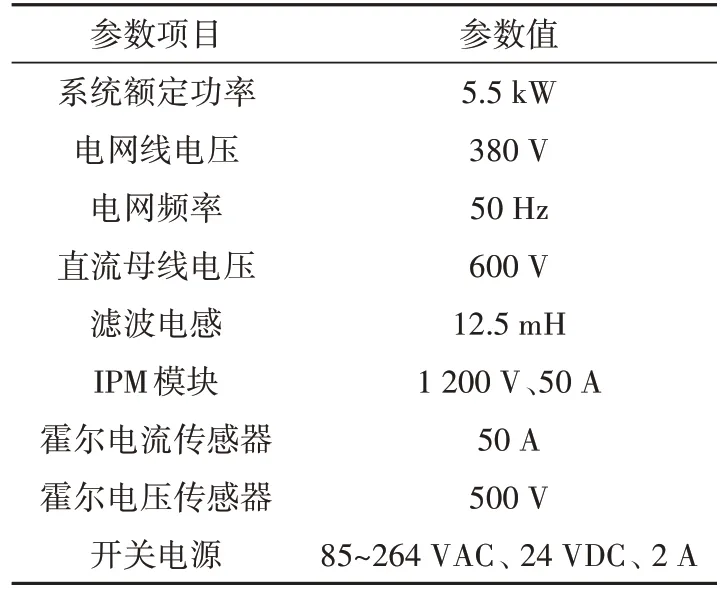
表2 變頻調(diào)速系統(tǒng)參數(shù)Fig.5 Implementation of dynamic decoupling controller
以如表2 所示的永磁同步電機(jī)變頻調(diào)速系統(tǒng)為研究對(duì)象開展本次實(shí)驗(yàn).
對(duì)本文設(shè)計(jì)的永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法進(jìn)行物理實(shí)現(xiàn),采用數(shù)字信號(hào)處理器(DSP)作為控制器的實(shí)現(xiàn)方式.如圖5所示.

圖5 動(dòng)態(tài)解耦控制器實(shí)現(xiàn)Fig.5 Implementation of dynamic decoupling controller
采用如圖5 所示的動(dòng)態(tài)解耦控制器對(duì)該系統(tǒng)進(jìn)行控制.為了驗(yàn)證本文所提方法的解耦控制性能,為該系統(tǒng)給定不同的轉(zhuǎn)速值,在四組回路中進(jìn)行解耦控制.
2.2 動(dòng)態(tài)解耦控制結(jié)果
將基于本文所提方法實(shí)現(xiàn)的動(dòng)態(tài)解耦控制器與永磁同步電機(jī)變頻調(diào)速系統(tǒng)進(jìn)行連接,測(cè)試該系統(tǒng)1s 內(nèi),在2 000 r/min 的基礎(chǔ)上給定轉(zhuǎn)速下的位移響應(yīng)曲線,如圖6所示.
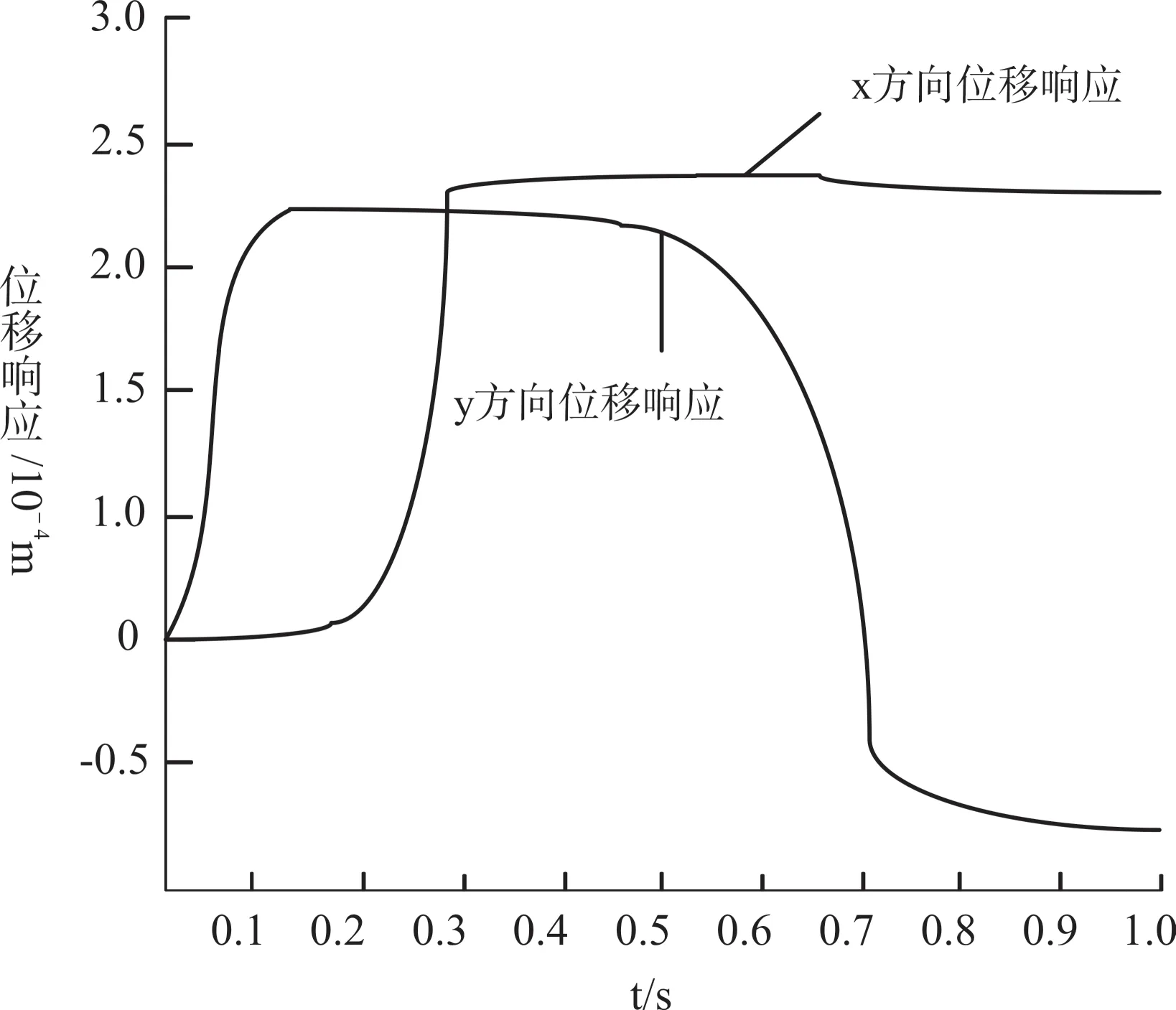
圖6 動(dòng)態(tài)解耦控制位移響應(yīng)曲線Fig.6 Dynamic decoupling control displacement response curve
由圖6 可知,本次永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制實(shí)驗(yàn)結(jié)果中,在1 s 的時(shí)間內(nèi),位移響應(yīng)的結(jié)果在部分區(qū)間內(nèi)較為平緩,體現(xiàn)了本文所提方法的解耦特性,說明解耦控制達(dá)到預(yù)期目標(biāo).無論是在x 方向還是y 方向的位移響應(yīng)均展現(xiàn)了較好的跟蹤性能.從這一動(dòng)態(tài)解耦控制結(jié)果可以初步判斷本研究所提方法的解耦控制結(jié)果較為合理,展現(xiàn)了該方法的應(yīng)用結(jié)果,表明所提方法的可行性.
2.3 結(jié)果分析指標(biāo)
為了更加直觀地體現(xiàn)出本研究所提技術(shù)方法的有效性,本次實(shí)驗(yàn)針對(duì)不同解耦控制方法下的負(fù)荷響應(yīng)進(jìn)行統(tǒng)計(jì),如式(12)所示.
式中,A表示解耦控制負(fù)荷響應(yīng)的幅值,ti表示大慣性時(shí)間延長,td表示延遲性時(shí)間延長,ζ表示解耦控制過程中的超調(diào)量.
負(fù)荷響應(yīng)的計(jì)算結(jié)果直接反映了永磁同步電機(jī)變頻調(diào)速系統(tǒng)解耦控制方法下,控制結(jié)果的魯棒性,體現(xiàn)了對(duì)永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制結(jié)果的優(yōu)劣.計(jì)算所得的負(fù)荷響應(yīng)幅值結(jié)果越穩(wěn)定,則說明該方法的動(dòng)態(tài)解耦控制效果越高,應(yīng)用性更強(qiáng).
2.4 結(jié)果分析與討論
將永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制實(shí)驗(yàn)的時(shí)長延長至1 000 s.為了體現(xiàn)本研究所提方法解耦控制結(jié)果的有效性,分別應(yīng)用文獻(xiàn)[1]和文獻(xiàn)[2]提出的解耦控制方法進(jìn)行永磁同步電機(jī)變頻調(diào)速系統(tǒng)解耦控制實(shí)驗(yàn),分析三種方法控制下,永磁同步電機(jī)變頻調(diào)速系統(tǒng)所承擔(dān)的負(fù)載.經(jīng)過實(shí)驗(yàn),得出不同方法的實(shí)驗(yàn)結(jié)果如圖7所示.

圖7 不同方法解耦控制結(jié)果Fig.7 Decoupling control results of different methods
由圖7 可知,本文所提出的永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法,計(jì)算所得的負(fù)荷響應(yīng)幅值較為穩(wěn)定,并且所需的解耦控制時(shí)間相較于其他兩種方法也比較短,在278 s 就開始趨于穩(wěn)定,而其他兩種方法解耦控制過程中的超調(diào)量明顯偏高,并且負(fù)荷響應(yīng)幅值的變化幅度也比較大,直到1 000 s的實(shí)驗(yàn)時(shí)間結(jié)束后,也未達(dá)到穩(wěn)定狀態(tài).
為了進(jìn)一步測(cè)試本文方法的解耦控制能力,對(duì)三種方法控制下的電流響應(yīng)曲線進(jìn)行分析,分析結(jié)果如圖8所示.
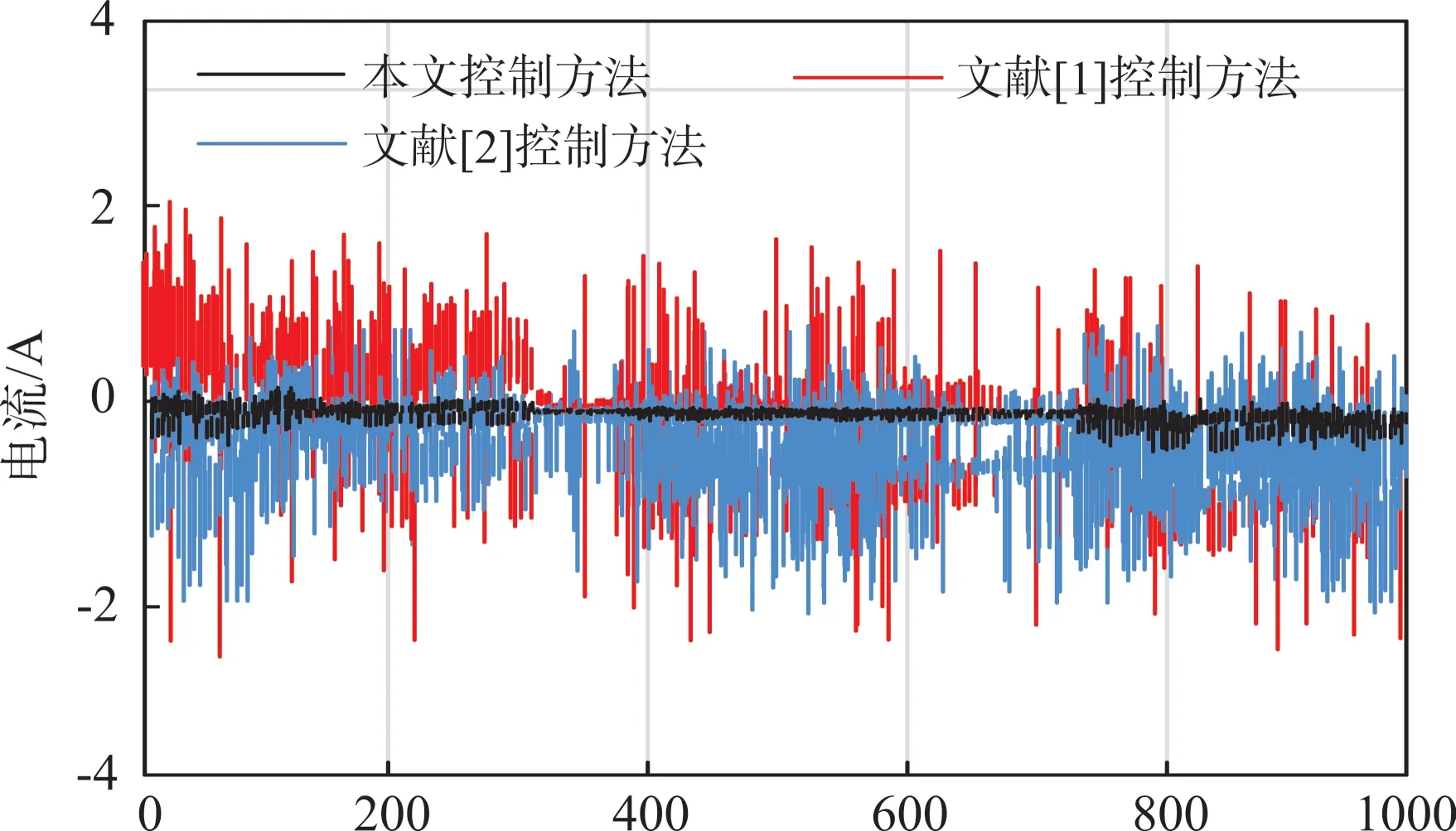
圖8 不同方法控制下電流響應(yīng)曲線分析Fig.8 Analysis of current response curves under different control methods
由圖8 可知,不同方法控制下電流響應(yīng)曲線中,本文控制方法的電流響應(yīng)曲線較平穩(wěn),證明該方法的動(dòng)態(tài)解耦控制效果最好,具有實(shí)用性.從對(duì)比結(jié)果可以看出,本文所提出的永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法,負(fù)荷響應(yīng)的穩(wěn)定性效果較好,解耦控制效果較為穩(wěn)定,在永磁同步電機(jī)變頻調(diào)速系統(tǒng)運(yùn)行過程中,能夠起到較好的解耦控制效果,提高系統(tǒng)的整體性能,在永磁同步電機(jī)變頻調(diào)速系統(tǒng)的實(shí)際運(yùn)行中,具備較高的應(yīng)用實(shí)踐價(jià)值.
3 結(jié)語
在永磁同步電機(jī)的應(yīng)用過程中,變頻調(diào)速系統(tǒng)是保證其應(yīng)用質(zhì)效的重要部分.為了解決該系統(tǒng)運(yùn)行過程中,不同回路之間存在的相互耦合關(guān)系,提出一種永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制方法.從實(shí)驗(yàn)結(jié)果可以看出,依據(jù)所提方法得出的永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制結(jié)果的負(fù)荷響應(yīng)較為穩(wěn)定,幅值較小,表明本文研究內(nèi)容能夠有效提高永磁同步電機(jī)變頻調(diào)速系統(tǒng)動(dòng)態(tài)解耦控制的效果,為提高變頻調(diào)速系統(tǒng)的整體性能提供參考,推動(dòng)永磁同步電機(jī)的應(yīng)用與發(fā)展.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34