基于飛行智能浮標(biāo)測流系統(tǒng)設(shè)計與實現(xiàn)
2024-03-04 10:39:02吳超群肖子平吳瑞欽
陜西水利 2024年1期
吳超群,肖子平,吳瑞欽
(廣東省水文局湛江水文分局,廣東 湛江 524000)
1 前言
在水文測驗中,河道流量的測驗工作是河流測量的重要內(nèi)容,也是水文計算、水土保持、水資源評價以及水生態(tài)環(huán)境評估的重要基礎(chǔ)數(shù)據(jù)[1],因此準(zhǔn)確、便捷的流量測驗具有重要的現(xiàn)實意義。
常規(guī)河流、渠道流速、流量測驗以纜道流速儀為標(biāo)準(zhǔn),隨著電子、通訊技術(shù)的發(fā)展,其他測流設(shè)備呈現(xiàn)出多樣化的趨勢,測量方式不斷創(chuàng)新。傳統(tǒng)測流設(shè)備已經(jīng)不能滿足洪水期、信息化以及水文現(xiàn)代化發(fā)展的需求,特別是針對應(yīng)急環(huán)境下的流量測驗工作[2]。當(dāng)河流處于洪水期、應(yīng)急環(huán)境下時,走航式ADCP 電動船[3]、轉(zhuǎn)子流速儀[3]、超聲波時差法[4]、側(cè)掃雷達(dá)[5]等設(shè)備都無法滿足洪水期惡劣環(huán)境條件下工作,其中由于流速較大難以保持電動船航行、鉛魚纜道難以在水中保持靜止、超聲波時差法只能測量某一層的流速等。再者出現(xiàn)的非接觸式無人機測流方式[6-7],由于其續(xù)航時間的限制也難以滿足洪水期流量測驗要求;GPS 智能測流系統(tǒng)采用高強度材料制作的浮球隨水漂流,通過浮球內(nèi)置高精度GPS 模塊來測量水面流速、流向等要素,流速球GPS 依賴于多普勒值進(jìn)行測速,利用載波相位差分得到的多普勒進(jìn)行測速,這時所得到的的速度為相鄰兩差分時間間隔期間的平均速度,但GPS 浮標(biāo)法[8-9]由于GPS 本身定位誤差大進(jìn)而導(dǎo)致測量數(shù)據(jù)不精確,且需要較多人工配合工作才能完成以及GPS 浮標(biāo)難以回收,成本較高。GPS浮標(biāo)智能測流系統(tǒng)的適應(yīng)性非常強,受自然環(huán)境及天氣因素的影響非常小,也不受能見度的限制,不受下雨、下雪等天氣的影響,甚至不受通航的限制[10]。針對上述問題,本文借助無人機機動靈活、起降便捷等優(yōu)勢和GPS 浮標(biāo)法測流技術(shù)優(yōu)勢相結(jié)合設(shè)計一種基于飛行智能浮標(biāo)測流方式來應(yīng)對洪水期流量測驗工作,實現(xiàn)超標(biāo)洪水期的流量測驗自動化、便攜化、實時性以及可回收性,其軟件平臺實現(xiàn)了內(nèi)、外業(yè) 一體化操作,并且實時監(jiān)控,減輕了測量人員的勞動強度,提高了工作效率,節(jié)約了大量的人力、物力、財力,同時有利于水文儀器的現(xiàn)代化發(fā)展方向。
2 飛行智能浮標(biāo)系統(tǒng)設(shè)計
2.1 飛行浮標(biāo)設(shè)計
該飛行智能浮標(biāo)采用無人機為載體,其外殼結(jié)構(gòu)采用一體化的防水設(shè)計,尺寸為300 mm×300 mm×150 mm,即飛行智能浮標(biāo)類似于GPS 浮標(biāo)功能,但它具有無人機的飛行能力。無人機系統(tǒng)由動力系統(tǒng)、圖傳系統(tǒng)、數(shù)傳系統(tǒng)、地面站系統(tǒng)以及控制系統(tǒng)組成,其中動力系統(tǒng)為無人機提供動力;圖傳系統(tǒng)能夠?qū)崟r傳輸“第一視角”畫面;數(shù)傳系統(tǒng)能夠?qū)o人機的姿態(tài)、高度、速度等數(shù)據(jù)實時傳輸至地面站;地面站可用于顯示任務(wù)規(guī)劃、數(shù)據(jù)顯示、展示以及處理;控制系統(tǒng)主要用手動控制無人機操作。外殼設(shè)計需要滿足如下要求:
(1)外表面為適應(yīng)流體結(jié)構(gòu)采用流線型設(shè)計,減少阻力;
(2)載體底部凹槽式容置空間,搭載測深儀進(jìn)行水位深度測量;
(3)無人機可以進(jìn)行水上起降。其外結(jié)構(gòu)見圖1。

圖1 飛行智能浮標(biāo)
2.2 定位系統(tǒng)
該飛行智能浮標(biāo)定位系統(tǒng)借助無人機載體的定位系統(tǒng),為了提高定位精度采用無人機移動RTK 和基準(zhǔn)RTK GNSS 設(shè)備進(jìn)行差分定位,頻率(GPS L1/L2,GLONASS G1/G2,BDS B1/B2,GALILEO E1/E5b,QZSSL1/L2),工作模式為GPS+GLONASS+BDS+GALILEO+QZSS 聯(lián)合定位,定位精度達(dá)到±2 cm,見圖2。
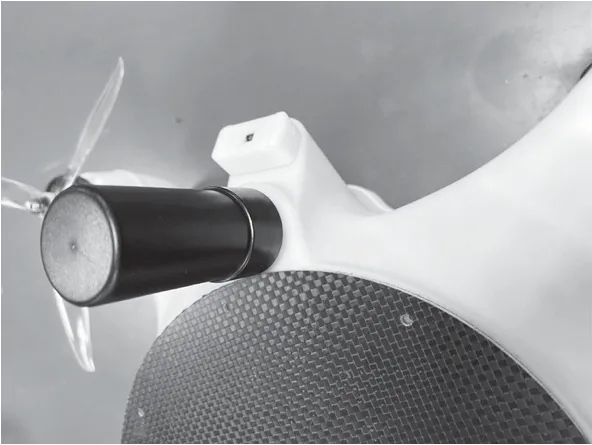
圖2 移動RTK 安裝位置
2.3 水體表層流速
水體表層流速通過飛行浮標(biāo)載體漂移速度測得,其具體步驟為:
(1)飛行浮標(biāo)手動飛行(或自主飛行)至水面上;
(2)降落在水面上的飛行浮標(biāo)隨水體流動(當(dāng)做浮標(biāo)),無人機在水面上的移動速度,也即水體表層流速,其速度通過無人機數(shù)傳系統(tǒng)實時傳輸至無人機地面站上,同時無人機日志也將保存數(shù)據(jù);
(3)測驗完成后,飛行浮標(biāo)飛行至下一個測量點進(jìn)行下一個點測驗。
2.4 數(shù)據(jù)傳輸系統(tǒng)
飛行浮標(biāo)的移動速度(水體表層流速)、測深儀深度、攜帶可見光相機第一現(xiàn)場視角以及控制信號方式都是通過無人機的數(shù)圖傳系統(tǒng)一體化傳輸至地面站上,見圖3。其數(shù)據(jù)傳輸方式數(shù)、圖、控傳輸系統(tǒng)見圖4。
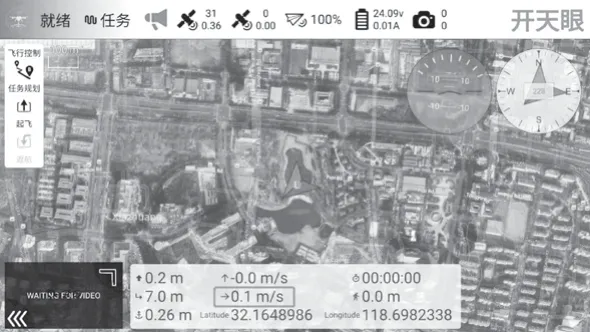
圖3 無人機地面站
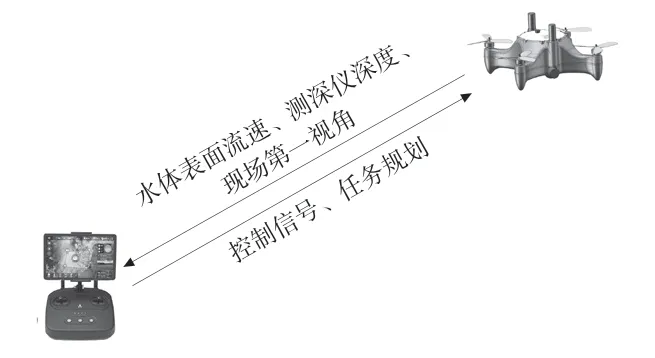
圖4 數(shù)據(jù)傳輸系統(tǒng)
3 飛行智能浮標(biāo)系統(tǒng)實現(xiàn)
選取安徽某明渠為例進(jìn)行流量測驗工作,本文采用中弘一點法浮標(biāo)垂線測驗,根據(jù)明渠流量和GPS 浮標(biāo)系數(shù)0.84 進(jìn)行流量測驗工作。
3.1 水體表層流速計算
根據(jù)飛行智能浮標(biāo)類比于GPS 浮標(biāo)方式來獲得其速度,其水體表層流速采用兩種方式獲得并進(jìn)行比較,其中一種通過距離和時間來求得速度,一種是飛行智能浮標(biāo)隨水體流動漂移速度,兩組均采用5 組求取平均值法進(jìn)行比較,其具體實現(xiàn)步驟如下,實驗見圖5。

圖5 流量測驗實驗圖
步驟(1):飛行浮標(biāo)準(zhǔn)備降落在水面上。
步驟(2):飛行浮標(biāo)降落A 點。
步驟(3):飛行浮標(biāo)隨水流漂移移動到B 點。
步驟(4):飛行浮標(biāo)測完結(jié)束后起飛進(jìn)行下一組測試,該方式可以進(jìn)行手動飛行,也可以根據(jù)任務(wù)規(guī)劃自主完成。
從圖5(b)到圖5(c)中可以根據(jù)A、B 兩點距離和時間求得速度,也可以直接通過飛行浮標(biāo)隨水流漂移速度(即飛行浮標(biāo)移動速度)實時傳輸至地面站獲得圖3 所示(紅色框內(nèi)表示無人機移動速度,即水體表層速度),測試5 組數(shù)據(jù)見表1,即水體表層流速等于無人浮標(biāo)漂移速度。表1 顯示在兩種方法獲得速度時誤差在5%左右,這也符合在應(yīng)急環(huán)境下的流速測得要求,因此用飛行智能浮標(biāo)隨水漂流來獲得水體表層流速此方法是可行的。
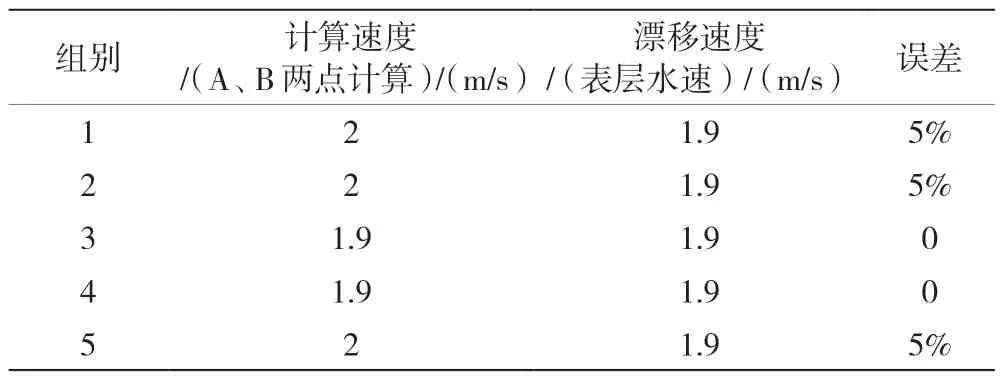
表1 水體表層流速
3.2 流量測驗
在上述獲得流速時,再導(dǎo)入大斷面數(shù)據(jù)、水位數(shù)據(jù),可計算斷面過水面積,再利用中泓浮標(biāo)法,將表面流速乘以中泓浮標(biāo)系數(shù)可轉(zhuǎn)換為斷面平均流速,再利用斷面平均流速乘以過水?dāng)嗝婷娣e即可計算斷面流量,其具體步驟如下。
浮標(biāo)法流量測驗屬于流速面積法范疇[11],其公式為:
式中:Qf為虛流量,m3/s;Vf為飛行浮標(biāo)載體所測流速,m/s;Af為所測垂線的相對河流斷面面積m2。
式中:Q 為實際斷面流量,m3/s,K 為浮標(biāo)系數(shù)。設(shè)置明渠流量和GPS 浮標(biāo)法進(jìn)行比測見表2,可以發(fā)現(xiàn)飛行浮標(biāo)法要明顯優(yōu)于GPS 浮標(biāo)法在誤差的允許范圍內(nèi)。
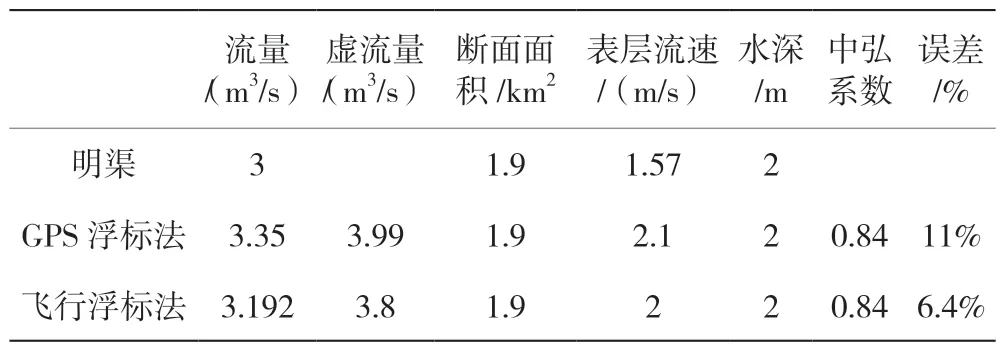
表2 流量比測工作
與此同時,比較了GPS 浮標(biāo)法和飛行浮標(biāo)法的優(yōu)缺點見表3。其結(jié)果顯示不管從人員、測量精度以及是否可以回收等問題,很明顯的看出,飛行浮標(biāo)法更有利于水文儀器現(xiàn)代化的發(fā)展需求,朝著智能化的發(fā)展趨勢。

表3 GPS 浮標(biāo)法和飛行浮標(biāo)法比較
4 結(jié)論
飛行浮標(biāo)法流量測驗是洪水期GPS 浮標(biāo)法、無人機測流法的一種重要的流量測驗補充方式,它利用了無人機的機動靈活、水上起降等特點并憑借其精確的差分定位系統(tǒng)大大改善了GPS 浮標(biāo)法的GPS 定位差、需要多人員配合工作才能完成的測流方式,大大解放了“勞動力”,這提高了流量測驗的效率,更好地服務(wù)于水文現(xiàn)代化的發(fā)展需求。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32