環境載荷逆向識別與虛擬模型試驗方法
2024-03-04 08:13:42肖龍飛魏漢迪吳文成朱子揚
上海交通大學學報 2024年2期
關鍵詞:環境
李 旭, 肖龍飛, 魏漢迪, 吳文成, 朱子揚, 李 琰
(上海交通大學 海洋工程國家重點實驗室,上海 200240;上海交通大學 崖州灣深海科技研究院,海南 三亞 572000)
海上浮式結構物的水動力性能對于浮體的運動響應至關重要.目前關于浮式結構物水動力學的研究主要通過兩種途徑:數值計算方法和模型試驗方法[1].基于勢流理論的數值計算方法被廣泛應用于浮式結構物運動響應[2]、平臺氣隙響應[3]、平臺共振特性[4]等研究,勢流理論基于流體無黏性假設,但是黏性力作用,比如渦激運動、馳振現象等,被證實對于平臺十分重要[5].模型試驗方法已經被成功應用于研究和評估海洋結構物水動力性能數十年,但是隨著海洋結構物的工作水深增加,在合理縮尺比范圍內(1/80≤λ≤1/60)[6],現有的深水試驗池由于尺寸限制,無法開展全水深模型試驗.因此,Stansberg等[6]提出混合模型試驗方法.該方法主要分為3個步驟.第1步根據等效準則,設計一套與全水深系泊系統近似等效的截斷系泊系統.第2步在海洋試驗水池開展截斷模型試驗.由于截斷系泊系統不可能與全水深系泊系統完全等效,所以需要第3步,即開展數值重構與數值外推,最終以數值結果預報全水深系統的實型水動力響應.數值重構為建立截斷數值模型,通過調節相關的水動力參數,使得數值計算結果與模型試驗結果盡可能一致.然后將驗證過的截斷數值模型系泊系統替換為全水深系泊系統開展計算,即為數值外推.傳統基于勢流理論的時域耦合數值模型,對于復雜海況下截斷水深模型試驗中可能存在的波浪爬升、波浪砰擊、渦激運動等強非線性和黏性水動力響應,理論數值方法面臨巨大困難和挑戰,影響到基于數值結果進行深海平臺系統水動力預報的準確性.
本文提出一種應用于混合模型試驗的環境載荷逆向識別和虛擬模型試驗方法.該方法可以逆向識別截斷模型試驗中的環境載荷,并通過截斷水深的虛擬模型試驗來驗證載荷分離的準確性.由于環境載荷直接從物理模型試驗中分離得到,所以該載荷考慮到了平臺六自由度(Six-degree-of-freedom, 6 DOF)運動之間的耦合作用、破浪砰擊等非線性作用以及流體對浮體的黏性力作用.對一半潛式平臺,在180°和90°方向極端海況下,分別開展風浪流模型試驗.由于水池尺寸限制無法開展全水深物理模型試驗,所以只對比分析截斷水深物理模型試驗和截斷水深虛擬模型試驗結果,驗證環境載荷分離方法和虛擬模型試驗數值模型的準確性.
1 環境載荷逆向識別與虛擬模型試驗方法
定義隨體坐標系G-xyz,其原點G位于平臺重心.全局坐標系O-XYZ初始位置與G-xyz重合.浮體的六自由度由向量ξ表示,則ξi(i= 1~6)分別表示縱蕩、橫蕩、垂蕩、橫搖、縱搖和首搖運動.根據牛頓第二定律和達朗貝爾原理,浮體的運動方程可表示為
(1)
式中:M為浮體的質量矩陣;K為回復力系數矩陣;FEX為作用于浮體重心的整體環境載荷,包括與浮體運動相關的力,比如附加質量力和阻尼力等;FMR為作用于浮體重心的系泊載荷,在數值計算中,系泊系統的黏性力依據規范簡化為相關黏性系數來表示[7].

(2)
模型試驗中,系泊纜載荷通常由單分力傳感器測得,因此需要進行力的分解變換,從而獲得全局坐標下的系泊系統載荷矩陣,具體可表示為
(3)
式中:[Fx(t)Fy(t)Fz(t)Mx(t)My(t)Mz(t)]T是六自由度方向的系泊纜載荷;i(i=1~n) 表示系泊纜編號,n表示系泊纜總數;Ti(t)表示t時刻第i根系泊纜的頂端張力;α表示相對于Z軸的偏角;β表示在X-Y平面內相對于X軸的偏角;(Xf,Yf,Zf)表示基于全局坐標系的導纜孔相對于重心的坐標,可以由下式求得:
(4)
式中:(xf,yf,zf)表示基于隨體坐標系的導纜孔相對于重心的坐標.在模型試驗中,系泊纜的偏角測量難度較大,可以在數值模型中基于平臺的運動數據對系泊纜進行強迫振蕩,從而可以近似計算得到α與β.
時域計算方程式(1)沒有解析解,需要通過數值方法求得近似解.Runge-Kutta系列方法常被應用在求解非線性常微分方程中[8],為了提高計算效率,減少搜索時間步長的計算量,使用Runge-Kutta-Fehlberg 方法(RKF45)[9]進行求解.在每一時間步中,RKF45 方法分別使用兩種不同階數的方法求下一時刻的數值解.若時間步合適,則兩種方法求得解的差別應極小.因此,將兩者的解進行比較后,若兩者差值不滿足要求,則減小時間步長;若其差值遠小于設定的誤差,則增大時間步長;若恰好滿足要求,則時間步不變.首先,RKF45 方法在每一時間步需要求解下述6個分量:
(5)
式中:h為積分步長;tk和yk均為初始值.
分別使用四階Runge-Kutta方法和五階Runge-Kutta方法估算方程下一刻的解,分別記為yk+1和zk+1:
(6)

(7)
最優的時間步長aΔt可以通過現有的時間步長Δt乘以一個系數a進行估算,a可由下式求得:
(8)
式中:etol為要求控制的誤差.
方法流程圖如圖1所示,從物理模型試驗中分離出環境載荷FEX, test,FEX, test是N×6矩陣,其中N表示時間步數.將FEX, test代入到運動控制方程式(1)中, 作用在數值模型重心處,可對模型開展同環境載荷的虛擬模型試驗, 通過虛擬模型試驗與物理模型試驗結果的對比可以驗證環境載荷逆向識別方法的準確性.在同一海況下,截斷模型試驗和全水深模型試驗中的波浪、風、流的參數設定一致,僅系泊系統存在差異,因此忽略兩模型試驗中的環境載荷差異.式(2)考慮了截斷模型試驗中的系泊載荷因素,所得環境載荷是與系泊系統的無關量.因此基于截斷模型試驗所得的環境載荷可以用于全水深系統的運動預報.
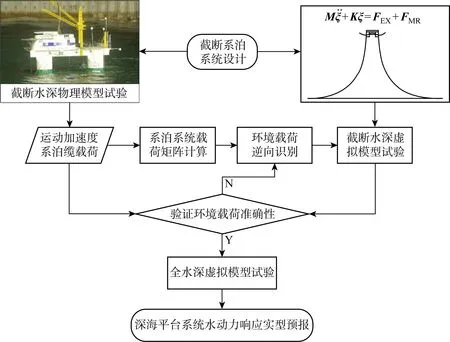
圖1 方法示意圖Fig.1 Flow chart of the proposed method
2 模型試驗概述
2.1 平臺與系泊系統
基于一半潛式平臺開展模型試驗,驗證環境載荷逆向識別與虛擬模型試驗方法的準確性.模型試驗在上海交通大學海洋工程深水試驗池中進行,模型縮比尺為1∶60,平臺主體結構包括4根立柱、2個浮箱、連接立柱的4個圓形橫撐和1個封閉箱型甲板,如圖2所示.平臺的主要參數如表1所示.平臺采用對稱系泊布置,8根系泊索,分為4組,布置在4個立柱上,系泊系統中錨鏈長度為 1 350 m,直徑為0.147 m,濕重為373.66 kg/m,軸向剛度為1 845 MN.平臺作業水深500 m,對應模型水深8.33 m.

表1 半潛式平臺主要參數Tab.1 Main parameters of the semi-submersible platform
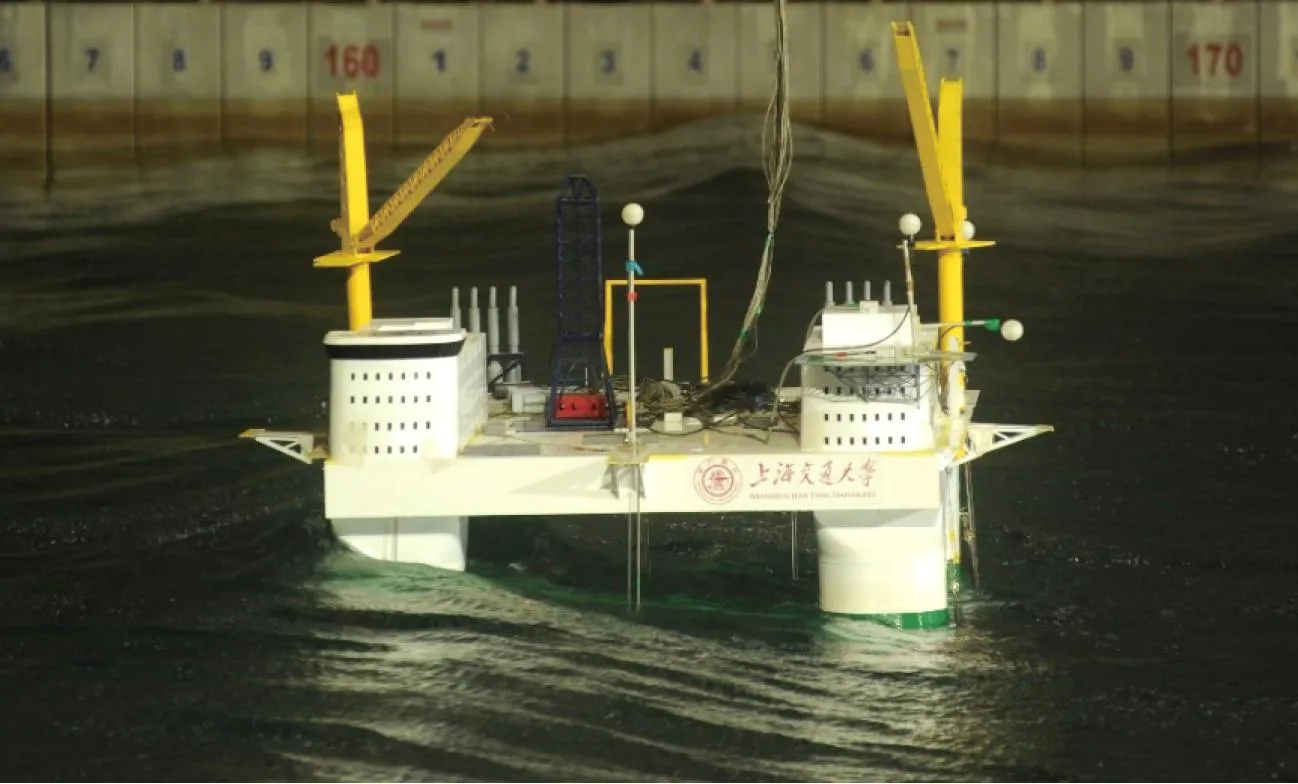
圖2 半潛式平臺試驗模型 Fig.2 Test model of the semi-submersible platform
2.2 海洋環境與工況設計
選取12級臺風以及十年一遇風浪流海況,開展平臺在180° 和90° 方向的模型試驗.波浪采用 JONSWAP 譜,有義波高為11.1 m, 譜峰周期為 13.6 s,譜型因子為2.4,流速為1.62 m/s,風速為 33 m/s,風浪流載荷作用方向一致.試驗工況如表2所示.模型試驗中,平臺重心處的六自由度運動可由非接觸式光學運動捕捉系統測得;系泊纜的頂端張力可由力傳感器測得;所有的數據通道都被實時數據采樣系統獲得,采樣頻率為100 Hz.

表2 試驗工況Tab.2 Test cases
3 結果與分析
3.1 靜水試驗結果
靜水自由衰減試驗可以得到半潛式平臺的垂蕩、橫搖和縱搖運動的固有周期,平臺自由衰減試驗結果如表3所示,固有周期的試驗結果與頻域計算軟件HydroD[10]求得的數值結果基本一致.水平剛度試驗用于驗證系泊系統試驗模型的準確性.圖3為系泊系統水平剛度對比結果.可以看出,系泊系統試驗模型的水平剛度特性在平臺運動區間內與設計結果基本相同,符合試驗要求.
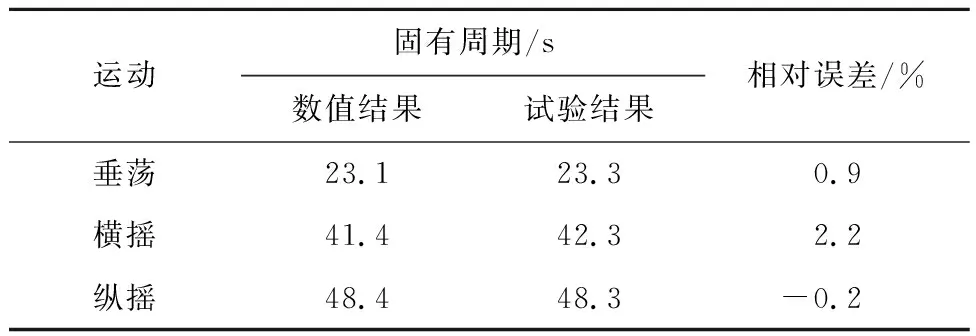
表3 靜水自由衰減試驗結果Tab.3 Results of decay tests
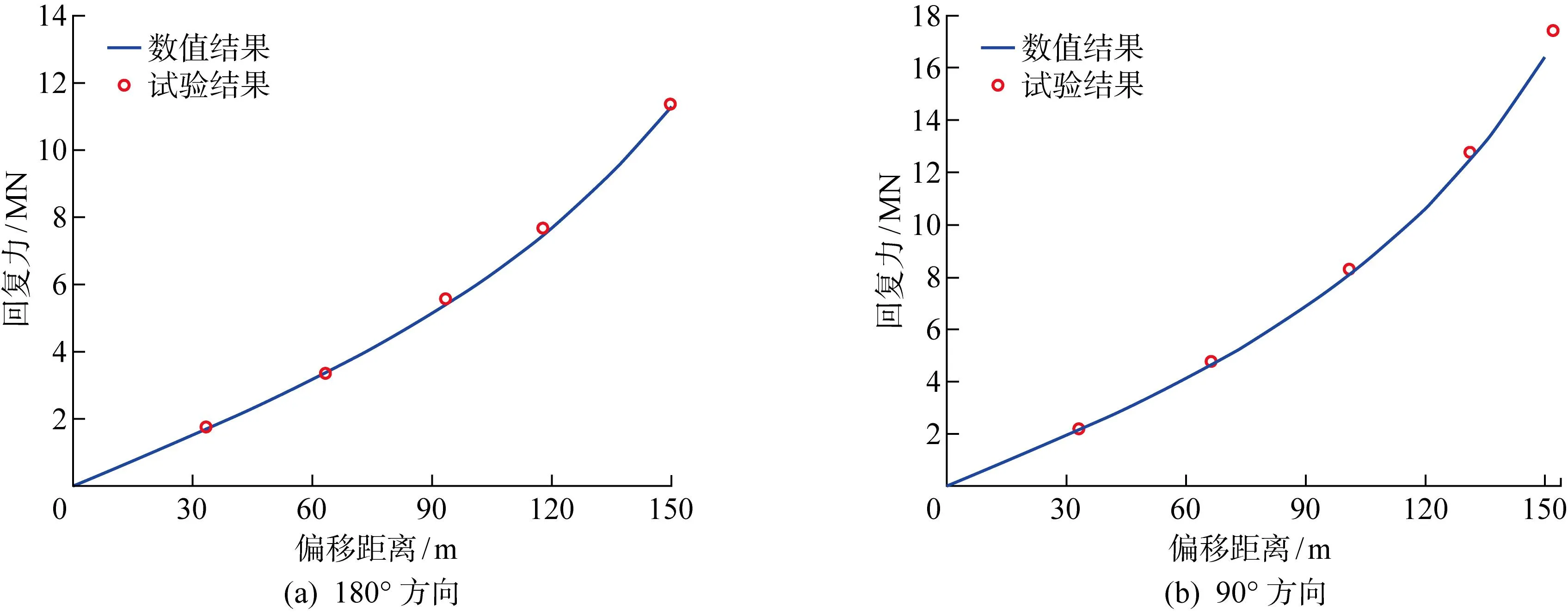
圖3 系泊系統水平剛度曲線Fig.3 Curves of horizontal stiffness of mooring system
3.2 風浪流響應結果
首先在深水試驗池開展風浪流模型試驗,然后通過環境載荷逆向識別方法將作用于平臺上的環境載荷分離出來,并將其加載到虛擬水池的數值模型上,開展虛擬模型試驗,試驗結果對比如圖4~5所示.圖4為180° 風浪流方向下,平臺六自由度運動物理模型試驗結果和虛擬模型試驗的時歷曲線結果對比,可以看出,基于環境載荷逆向識別的虛擬模型試驗結果與物理試驗結果基本一致,從而驗證了環境載荷逆向識別方法的準確性.如圖4(b)、4(f)所示,平臺橫蕩和首搖發生明顯的流致運動(Flow-induced Motion),說明環境載荷逆向識別方法可以有效地識別出黏性力載荷.圖5為90° 風浪流方向下,平臺六自由度運動物理模型試驗結果和虛擬模型試驗的時歷曲線結果對比,虛擬模型試驗結果與物理試驗結果基本一致.同樣,平臺縱蕩和首搖也發生明顯的流致運動,如圖5(a)、5(f)所示.結果顯示環境載荷逆向識別方法可以準確識別多角度、風浪流聯合作用下的模型試驗環境載荷.

圖4 180° 風浪流工況下,平臺六自由度運動物理模型試驗和虛擬模型試驗結果對比Fig.4 Time histories of 6 DOF motions in head waves
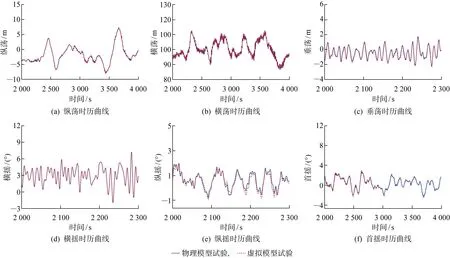
圖5 90° 風浪流工況下,平臺六自由度運動物理模型試驗和虛擬模型試驗結果對比Fig.5 Time histories of 6 DOF motions in beam waves
4 結語
本文提出一種基于模型試驗的環境載荷逆向識別和虛擬模型試驗方法.將模型試驗中的浮體受到的環境載荷分離出來并施加到虛擬水池中的數值模型上,進行虛擬模型試驗.環境載荷直接從物理模型試驗中分離得到,因此該載荷考慮到了平臺六自由度運動之間的耦合作用、破浪抨擊等非線性作用以及流體對浮體的黏性力作用.
基于一半潛式平臺,開展180° 和90° 方向的風浪流模型試驗.由物理模型試驗和虛擬模型試驗的對比結果可知,環境載荷逆向識別方法可以準確識別風浪流響應模型試驗的環境載荷.
平臺在180° 方向的響應中,橫蕩和首搖運動出現明顯的流致運動,同樣,在90° 方向的響應中,縱蕩和首搖運動也出現明顯的流致運動,說明環境載荷逆向識別方法可以有效地識別出黏性力載荷.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38