基于深度學(xué)習(xí)的螺旋槳水動(dòng)力性能快速預(yù)報(bào)方法
2024-03-04 08:08:40胡安康侯立勛
上海交通大學(xué)學(xué)報(bào) 2024年2期
高 楠, 胡安康, 侯立勛, 常 欣
(大連海事大學(xué) 船舶與海洋工程學(xué)院,遼寧 大連 116026)
螺旋槳的敞水水動(dòng)力性能是校核優(yōu)化設(shè)計(jì)和驗(yàn)證理論方法的重要依據(jù).目前,敞水性能的獲取方式主要有3類:敞水試驗(yàn)、勢流理論法和基于黏性流體理論的計(jì)算流體力學(xué)(Computational Fluid Dynamics, CFD)法.
敞水試驗(yàn)是最傳統(tǒng)的獲取敞水性能的方法,也是研究螺旋槳水動(dòng)力性能的重要方法,但試驗(yàn)成本偏高且不具備快速預(yù)報(bào)的能力.
勢流理論法以3種為主:升力線法、升力面法、面元法.升力線法在涉及螺旋槳側(cè)斜和縱傾問題時(shí)局限性很大;升力面法不能直接預(yù)報(bào)槳葉導(dǎo)邊區(qū)域的壓力分布,對空泡性能的預(yù)報(bào)精度較低;面元法未考慮流體自身黏性,無法解決與流體黏性相關(guān)的問題.
CFD法能夠避免敞水試驗(yàn)高費(fèi)用的缺點(diǎn),并考慮了流體黏性,可以捕捉大量物理信息,在螺旋槳性能研究領(lǐng)域收到眾多學(xué)者的應(yīng)用,但計(jì)算周期長達(dá)數(shù)小時(shí),不能滿足實(shí)時(shí)預(yù)報(bào)的要求.
因此,開發(fā)一種基于槳葉幾何參數(shù)進(jìn)行快速預(yù)報(bào)不同類型螺旋槳敞水性能的方法對螺旋槳的優(yōu)化設(shè)計(jì)和理論校核有重要意義.機(jī)器學(xué)習(xí)理論的發(fā)展為螺旋槳性能預(yù)報(bào)提供了新思路,例如Choi 等[1]利用深度強(qiáng)化學(xué)習(xí)預(yù)測船尾螺旋槳軸形變,Bakhtiari 等[2]通過構(gòu)建一個(gè)3層的神經(jīng)網(wǎng)絡(luò)模型對某小螺距比的螺旋槳進(jìn)行快速預(yù)報(bào), Shora 等[3]基于反向傳播(BP)神經(jīng)網(wǎng)絡(luò)預(yù)報(bào)螺旋槳敞水性能與空泡性能,王超等[4]基于橢圓基神經(jīng)網(wǎng)絡(luò)與遺傳算法開展KP505槳的優(yōu)化設(shè)計(jì)與參數(shù)分析,Xue 等[5]基于雙隱藏層的BP神經(jīng)網(wǎng)絡(luò)與遺傳算法對P4382槳進(jìn)行優(yōu)化設(shè)計(jì),均顯著提高了螺旋槳性能,還有些學(xué)者基于卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行螺旋槳輻射噪聲預(yù)測[6-8],取得了不錯(cuò)的效果.總之,在對某一槳型進(jìn)行優(yōu)化設(shè)計(jì)或性能預(yù)報(bào)方面,機(jī)器學(xué)習(xí)的精度與快速性已經(jīng)獲得眾多學(xué)者的認(rèn)可與應(yīng)用,但模型缺乏普適性,僅對特定槳有較高的精度,若預(yù)測其余槳型則需重新進(jìn)行模型訓(xùn)練、調(diào)整模型的超參數(shù),將耗費(fèi)大量人力、時(shí)間成本,快速性的優(yōu)勢不復(fù)存在,這極大限制了其在工程實(shí)踐中的應(yīng)用范圍.
缺乏普適性的原因在于目前的研究大多只采用單一結(jié)構(gòu)的神經(jīng)網(wǎng)絡(luò):BP神經(jīng)網(wǎng)絡(luò)、橢圓基神經(jīng)網(wǎng)絡(luò)或卷積神經(jīng)網(wǎng)絡(luò),模型缺乏同時(shí)處理多個(gè)維度不同的螺旋槳幾何參數(shù)的能力,輸入向量缺乏足夠表征槳葉形狀的能力,這正是實(shí)現(xiàn)預(yù)測不同類型螺旋槳水動(dòng)力性能的關(guān)鍵技術(shù),因此目前只能實(shí)現(xiàn)對特定槳的快速預(yù)報(bào).傳統(tǒng)機(jī)器學(xué)習(xí)模型為避免梯度爆炸或消失問題導(dǎo)致模型收斂效果不佳,只能采用少量的隱藏層,并在每層中設(shè)置大量的隱藏單元,導(dǎo)致模型參數(shù)過多,收斂速度較慢,但對復(fù)雜數(shù)據(jù)的擬合效果并不理想.且當(dāng)前研究僅憑隨機(jī)產(chǎn)生的初始權(quán)重與閾值進(jìn)行模型訓(xùn)練,因此模型存在陷入局部最優(yōu)的問題,導(dǎo)致預(yù)測精度與CFD法相比存在差距,在實(shí)踐中存在較大的局限性.
為實(shí)現(xiàn)螺旋槳水動(dòng)力性能的快速、精確預(yù)報(bào),提出一種基于改進(jìn)的殘差神經(jīng)網(wǎng)絡(luò)的螺旋槳水動(dòng)力性能預(yù)報(bào)模型,通過殘差連接方式徹底解決傳統(tǒng)神經(jīng)網(wǎng)絡(luò)隨深度增加導(dǎo)致的梯度消失或爆炸問題,從而大幅增加模型深度,采用多分支并聯(lián)的 Inception 結(jié)構(gòu)增加了模型寬度,可以同時(shí)從多個(gè)不同尺度提取數(shù)據(jù)特征,實(shí)現(xiàn)實(shí)時(shí)準(zhǔn)確預(yù)報(bào)不同類型螺旋槳水動(dòng)力性能. 為對模型的初始權(quán)重與閾值進(jìn)行優(yōu)化,避免模型訓(xùn)練陷入局部最優(yōu),進(jìn)一步提高模型的預(yù)測性能,提出一種改進(jìn)的天牛群搜索(Improved Beetle Swarm Antennae Search, IBSAS)算法,在每次更新全局與個(gè)體的歷史最優(yōu)解時(shí),基于Metropolis準(zhǔn)則進(jìn)行二次判定,解決陷入局部最優(yōu)的問題,每次迭代的搜索范圍能夠通過自適應(yīng)因子根據(jù)當(dāng)前搜索結(jié)果自行調(diào)節(jié),避免錯(cuò)過最優(yōu)解,最終為螺旋槳的設(shè)計(jì)工作提供一套高效、可靠的水動(dòng)力性能預(yù)報(bào)工具.
1 方法原理與實(shí)驗(yàn)
1.1 改進(jìn)的殘差神經(jīng)網(wǎng)絡(luò)模型
傳統(tǒng)機(jī)器學(xué)習(xí)模型的梯度隨深度增加以累乘的方式遞增,這極大限制了模型的縱向深度,使其對復(fù)雜的高維度數(shù)據(jù)的擬合能力欠佳,因此并不適用于預(yù)測不同類型螺旋槳的水動(dòng)力性能.因此本文提出一種改進(jìn)的基于Inception結(jié)構(gòu)與深度殘差神經(jīng)網(wǎng)絡(luò)(Deep Residual Network, DRN)相結(jié)合的深度殘差網(wǎng)絡(luò)(Improved Deep Residual Network, IDRN)模型,模型中每個(gè)模塊的結(jié)構(gòu)如圖1所示.圖中:虛線部分為殘差連接方式;x為模型輸入;F(x)為殘差映射映射.模型誤差的反向傳播如下:
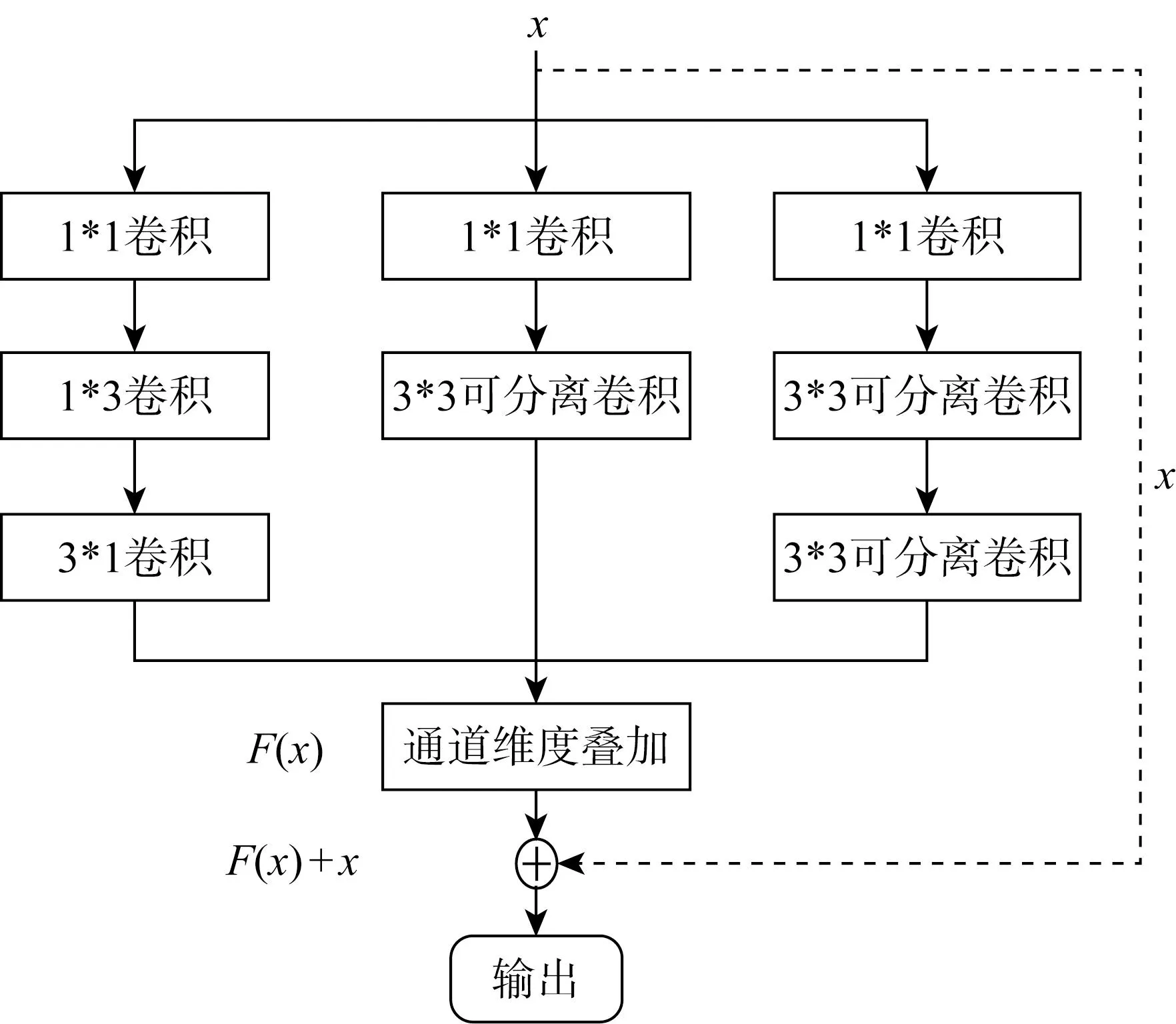
圖1 改進(jìn)的Inception-DRN結(jié)構(gòu)Fig.1 Structure of the improved Inception-DRN

(1)
式中:lloss為損失函數(shù)值;F為輸入與輸出間的映射;xl為殘差單元的輸入;l為殘差單元的索引值;L為比l更深的殘差單元層數(shù);W為權(quán)重.
模型梯度隨深度增加以累加的方式遞增,徹底解決深度增加導(dǎo)致的梯度消失或梯度爆炸的問題,使深度殘差神經(jīng)網(wǎng)絡(luò)比基于單向連接的神經(jīng)網(wǎng)絡(luò)具備更深的縱向深度,大幅提高了模型的非線性擬合能力.每個(gè)模塊由3個(gè)具有不同尺寸卷積層的分支結(jié)構(gòu)并聯(lián)而成,同時(shí)拓展了神經(jīng)網(wǎng)絡(luò)的寬度與深度.每個(gè)分支的第1層均使用1*1的卷積核進(jìn)行降維,減少模型參數(shù),后續(xù)每個(gè)不同尺寸的卷積核可以捕捉輸入數(shù)據(jù)在不同尺度上的特征,虛線部分為用于調(diào)整通道維度的卷積運(yùn)算.
傳統(tǒng)神經(jīng)網(wǎng)絡(luò)隨深度或?qū)挾仍黾訒?huì)導(dǎo)致網(wǎng)絡(luò)中待學(xué)習(xí)參數(shù)過多,使模型收斂較慢,改進(jìn)的Inception模塊用連續(xù)的深度可分離卷積核替換常用的大尺寸卷積核,不降低計(jì)算精度并減少計(jì)算參數(shù)為傳統(tǒng)卷積的1/5,緩解了 IDRN模型因深度與寬度的大幅增加導(dǎo)致的參數(shù)爆炸問題.
模型具體結(jié)構(gòu)如圖2所示.圖中:x1,x2,…,xq為輸入向量;KT和KQ分別為推力系數(shù)和轉(zhuǎn)矩系數(shù).模型整體由兩部分構(gòu)成:一部分由多個(gè)全連接層構(gòu)成;另一部分由50個(gè)如圖1所示的改進(jìn) Inception-DRN單元構(gòu)成,二者分別用于提取FS1與FS2中的數(shù)據(jù)特征(FS1為一維標(biāo)量,FS2為二維向量),使模型具備同時(shí)提取不同維度幾何參數(shù)特征的能力,能夠更精確地?cái)M合螺旋槳槳葉形狀與其水動(dòng)力性能間的映射關(guān)系.
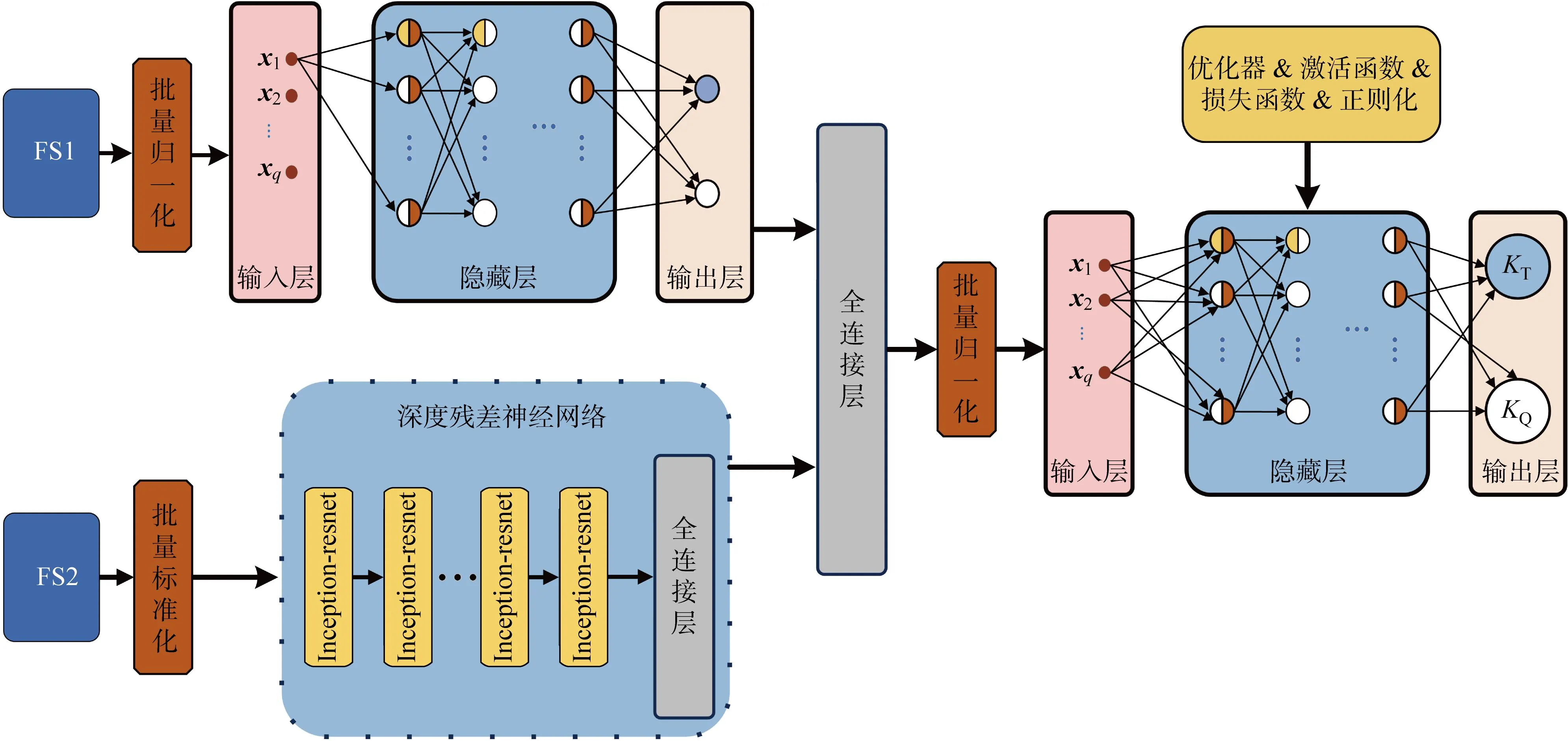
圖2 深度學(xué)習(xí)預(yù)報(bào)模型結(jié)構(gòu)Fig.2 Prediction model based on deep learning
模型的優(yōu)化器為自適應(yīng)矩估計(jì)(Adaptive Moment Estimation, Adam)算法, 以均方誤差(Mean Square Error, MSE)為損失函數(shù),其定義如下:
(2)
式中:yi為樣本真實(shí)值;f(xi)為模型預(yù)測值;n為樣本個(gè)數(shù).
使用Morlet小波函數(shù)作為神經(jīng)元的激活函數(shù),其定義如下:
(3)
式中:A為重構(gòu)時(shí)的歸一化常數(shù),本文A=1;ζ為神經(jīng)元的輸入值.
1.2 改進(jìn)的天牛須搜索算法
天牛須搜索(Beetle Antennae Search, BAS)算法是一種仿生優(yōu)化算法,搜索方向完全隨機(jī),收斂速度較慢,每次迭代的步長固定,可能會(huì)錯(cuò)過全局最優(yōu)解或陷入局部最優(yōu).因此本文提出改進(jìn)的天牛須搜索(Improved Beetle Antennae Search, IBAS)算法,利用k個(gè)智能體進(jìn)行尋優(yōu),引入自適應(yīng)步長調(diào)節(jié)因子c,其定義如下:
(4)

(5)
(6)
式中:fil與fir分別為左須與右須適應(yīng)度值.假設(shè)當(dāng)前的全局歷史最優(yōu)適應(yīng)度值為fbest,僅當(dāng)fbest更新時(shí),全局歷史最佳位置xgbest才會(huì)更新,但每輪迭代中的全局最優(yōu)適應(yīng)度仍會(huì)被記錄,便于搜索步長根據(jù)式(6)進(jìn)行自適應(yīng)調(diào)節(jié),個(gè)體的歷史最佳適應(yīng)度值與歷史最佳位置的更新也同理.

Metropolis準(zhǔn)則的作用如圖3所示.
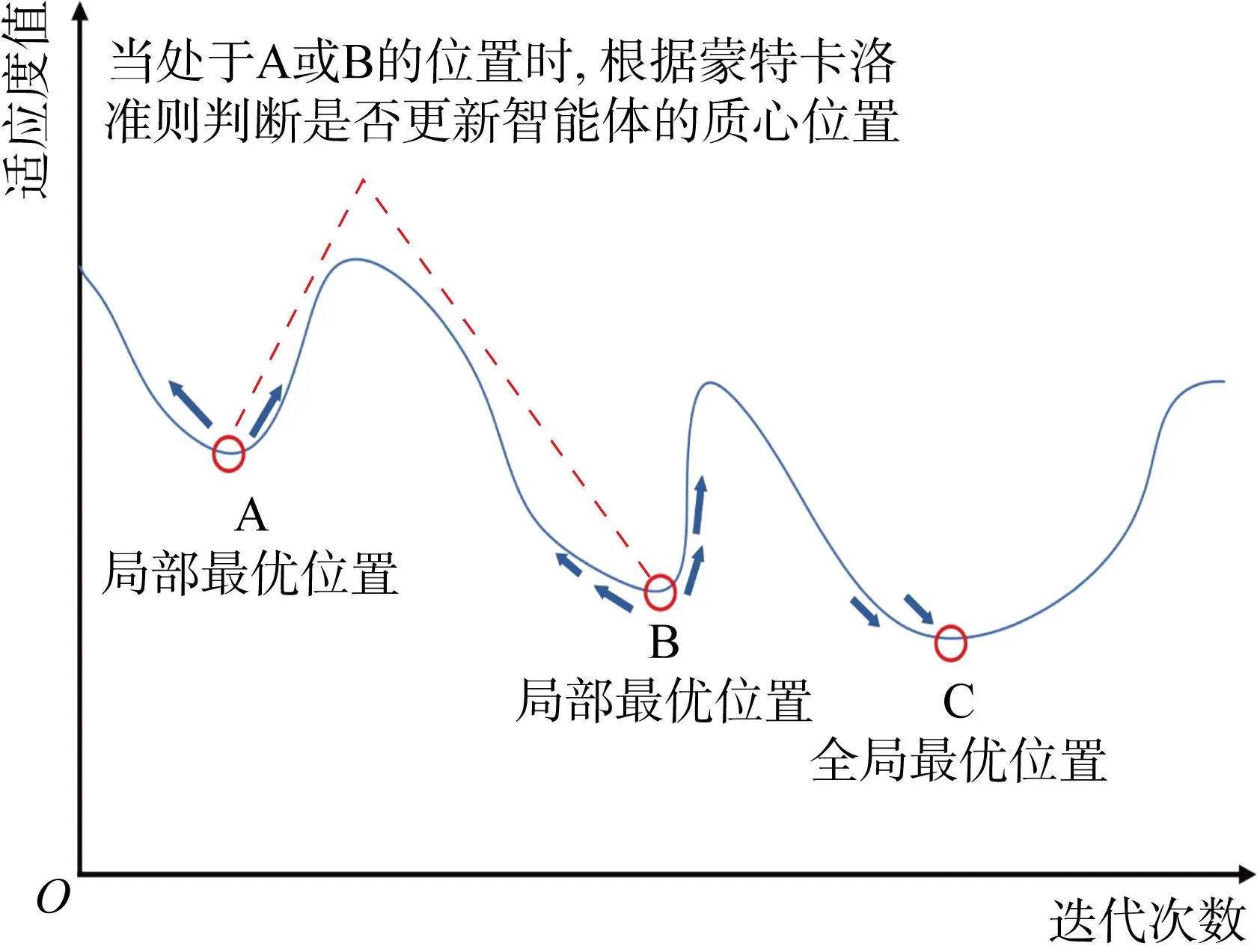
圖3 Metropolis準(zhǔn)則解決局部最優(yōu)問題Fig.3 Metropolis criterion for solving local optimal problems
改進(jìn)后的BAS算法流程如圖4所示.圖中:e為一個(gè)[0,1]的隨機(jī)數(shù).
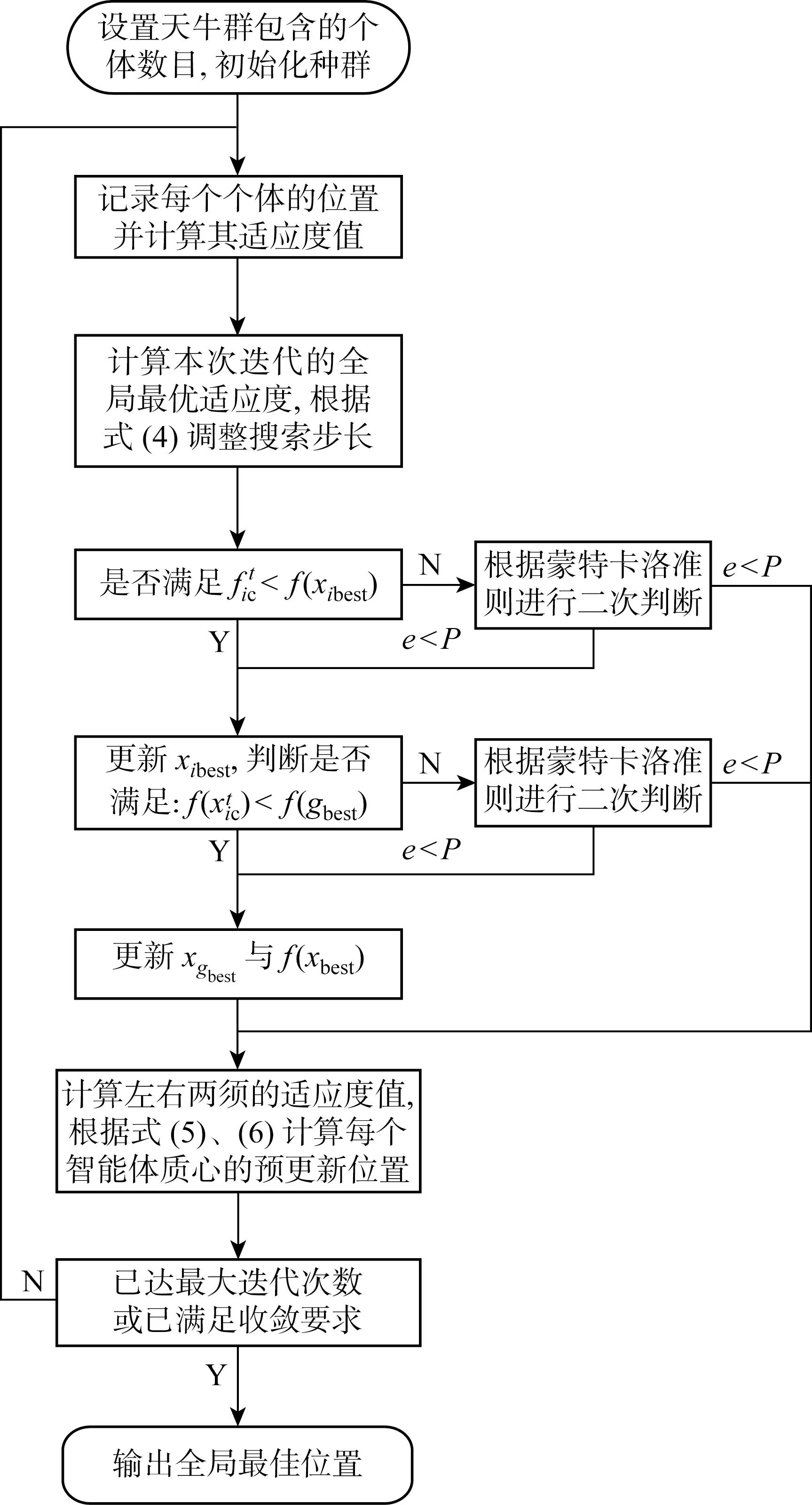
圖4 改進(jìn)的BAS算法流程圖Fig.4 Process of the improved BAS algorithm
1.3 確定輸入與輸出變量
本文的輸入變量input由FS1、FS2構(gòu)成,輸出變量output由敞水水動(dòng)力性能(OPS)構(gòu)成.FS1包含關(guān)于螺旋槳尺寸、工況的變量;FS2包含每個(gè)標(biāo)準(zhǔn)槳的11個(gè)槳葉剖面的幾何特征,均為二維向量;OPS中涵蓋了每個(gè)螺旋槳在J=0.1到J=1.0工況下的KT與KQ,數(shù)據(jù)集如表1所示.
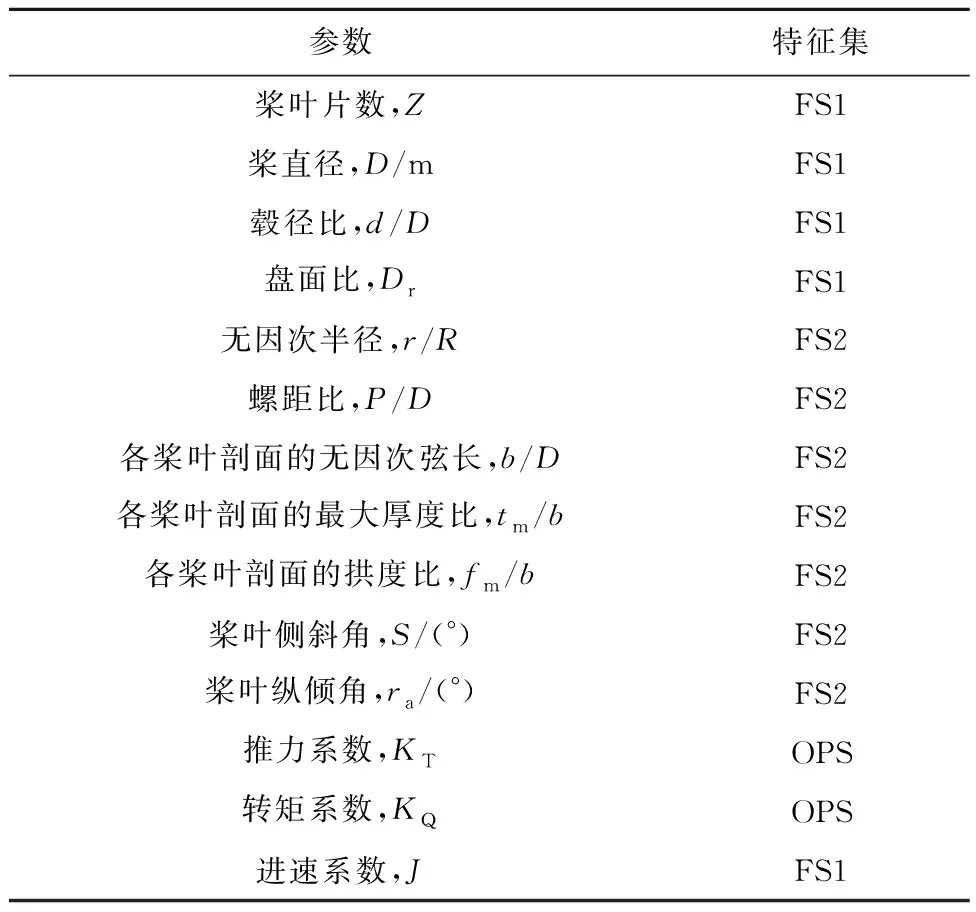
表1 槳葉幾何參數(shù)及其敞定水水動(dòng)力性能義Tab.1 Definition of blade geometrical parameters and hydrodynamic performance
為預(yù)測盡量多類型的螺旋槳的敞水性能,選取了常見的18種槳型(有無側(cè)斜與縱傾、定螺距與變螺距、三葉槳至五葉槳),涵蓋了各類型船舶常用的螺旋槳類型,滿足不同船舶的性能需求,因?yàn)楫?dāng)前用于大型船舶的螺旋槳性能研究是該領(lǐng)域的前沿課題,所以數(shù)據(jù)集中用于大型船舶的螺旋槳占總數(shù)的比例約為61.1%,這使預(yù)報(bào)模型具備更強(qiáng)的工程實(shí)踐意義.數(shù)據(jù)集詳細(xì)數(shù)據(jù)如表2所示,相關(guān)幾何參數(shù)與試驗(yàn)值見文獻(xiàn)[9-33].表中:P/D(0.7R)為0.7R處的螺距比.以嚴(yán)格分割方式即訓(xùn)練集與測試集間無交集,將數(shù)據(jù)集分為訓(xùn)練集與測試集,訓(xùn)練集包含的槳型較多.
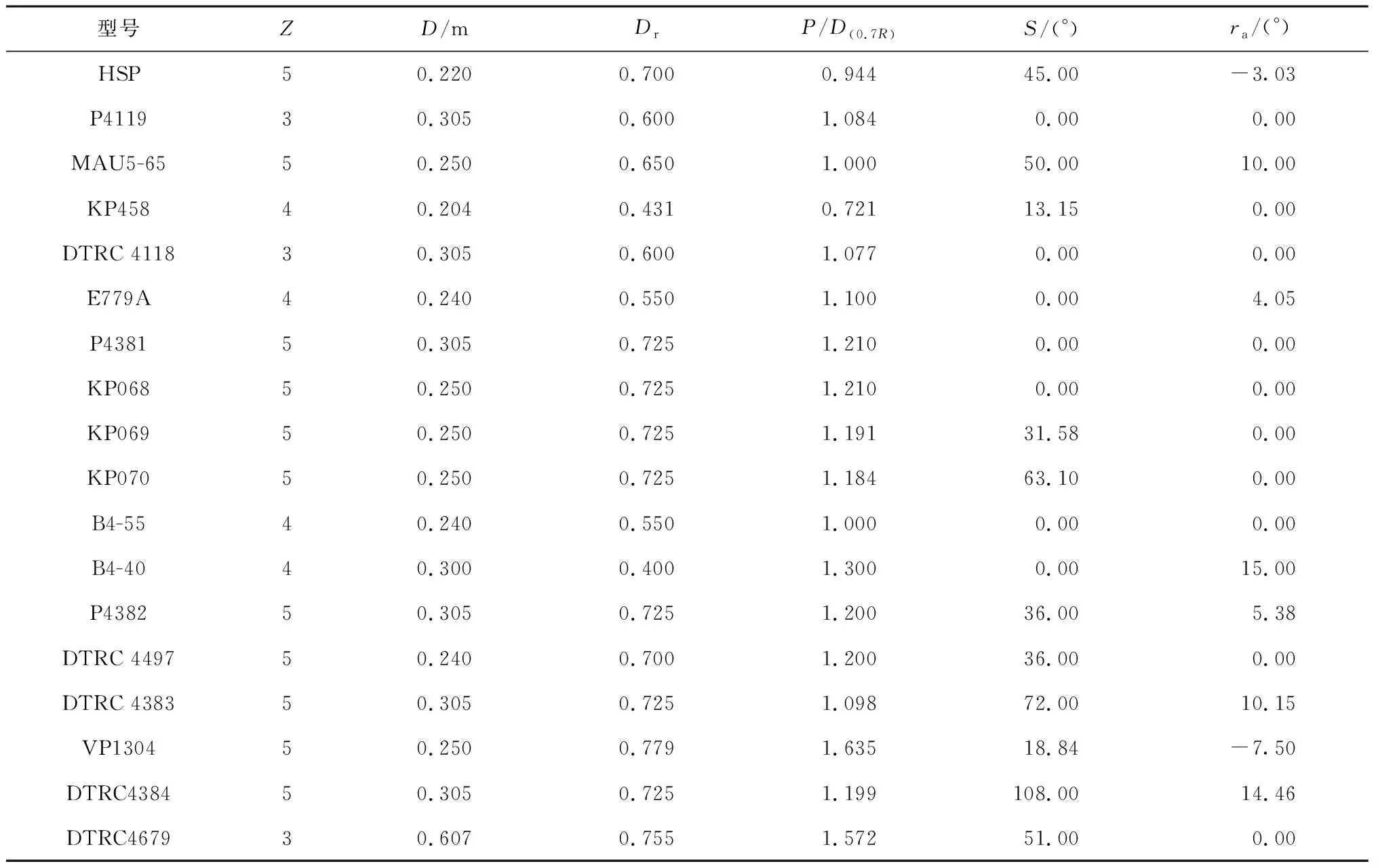
表2 數(shù)據(jù)集內(nèi)的螺旋槳及其主要參數(shù)Tab.2 Propellers and their main parameters in the data set
2 試驗(yàn)與分析
首先基于8種標(biāo)準(zhǔn)測試函數(shù)開展基于改進(jìn)的天牛群搜索算法的優(yōu)化性能分析試驗(yàn),并與幾種傳統(tǒng)優(yōu)化算法進(jìn)行對比,驗(yàn)證該算法的有效性.其次對比IDRN模型與其他深度學(xué)習(xí)模型對本文數(shù)據(jù)集的訓(xùn)練效果,并利用IBSAS算法對模型的初始權(quán)重與閾值進(jìn)行優(yōu)化,最后選擇數(shù)據(jù)集之外的螺旋槳檢驗(yàn)優(yōu)化后的IDRN的性能.
測試函數(shù)及其取值區(qū)間如表3所示,f1~f4
為單峰函數(shù),f5~f8為多峰函數(shù).選取BAS、天牛群搜索 (Beetle Swarm Antennae Search, BSAS)算法、粒子群搜索(Particle Swarm Optimization, PSO)算法、模擬退火(Simulated Annealing, SA)算法作為對比算法,為確保算法的收斂性,所有算法均設(shè)置5 000次迭代,搜索空間的維度均為30,且在每個(gè)函數(shù)上的初始位置均由同一隨機(jī)種子生成,避免因隨機(jī)初始化帶來的性能差異,PSO、BSAS、IBSAS的種群規(guī)模均為50.
2.1 基于單峰函數(shù)的性能評估
5種算法在f1~f44個(gè)單峰測試函數(shù)上的適應(yīng)度收斂曲線如圖5所示.

圖5 5種算法在單峰函數(shù)的收斂曲線Fig.5 Convergence curves of five algorithms in unimodal functions
從總體來看,IBSAS算法在單峰函數(shù)上的性能表現(xiàn)明顯優(yōu)于其余4種算法.在f1~f4上,IBSAS 算法分別歷時(shí) 1 249、1 748、2 736、1 826 次迭代時(shí)尋到最優(yōu)值,其余3種算法最快則需 2 437、2 583、3 174、3 195 次迭代,證明IBSAS搜索效率顯著高于傳統(tǒng)算法;尋優(yōu)過程中,IBSAS的收斂速度經(jīng)歷多次變化,這是因?yàn)椴介L調(diào)節(jié)因子在自適應(yīng)的調(diào)節(jié)搜索步長,平衡算法的全局搜索能力與局部精確勘探能力,迭代初期快速接近最優(yōu)解,當(dāng)接近最優(yōu)位置時(shí)則急速減小每次迭代的搜索范圍,避免錯(cuò)過最優(yōu)解.
2.2 基于多峰函數(shù)的性能評估
5種算法在多峰函數(shù)f5~f8上的適應(yīng)度收斂曲線如圖6所示.
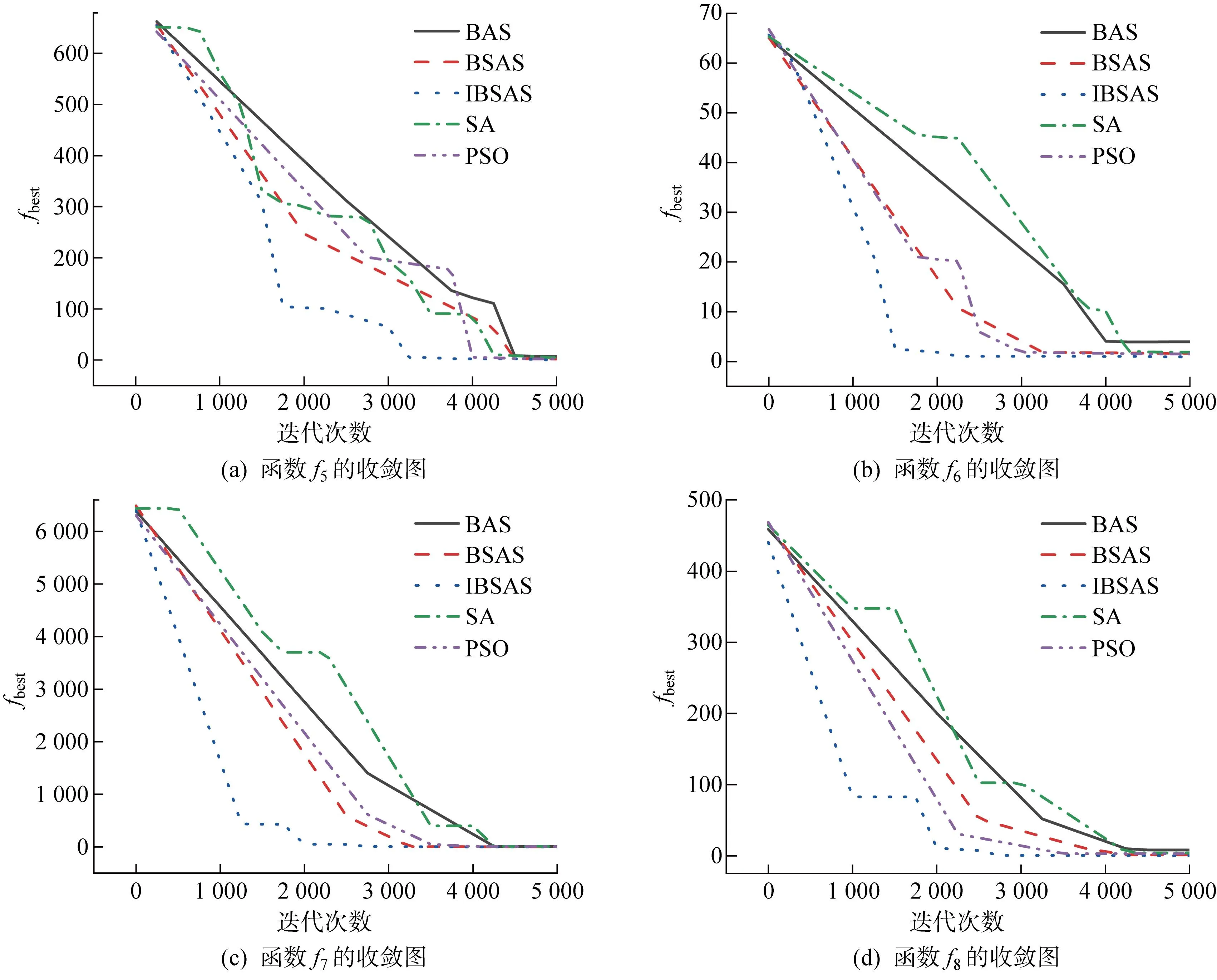
圖6 5種算法在多峰函數(shù)的收斂曲線Fig.6 Convergence curves of five algorithms in multimodal functions
IBSAS算法在多峰函數(shù)上的尋優(yōu)過程基本相同:初期收斂速度極快,然后進(jìn)入一段停滯期,最后以逐漸下降的速度結(jié)束搜索.因?yàn)槎喾搴瘮?shù)存在多個(gè)局部最優(yōu)解,IBSAS算法在搜索過程中陷入局部最優(yōu)的頻率明顯高于單峰函數(shù)試驗(yàn),停滯期也更長,但在個(gè)體質(zhì)心位置迭代時(shí)結(jié)合Metropolis準(zhǔn)則進(jìn)行二次判定,使其在一定次數(shù)迭代后成功脫離局部最優(yōu)位置.在f5、f6、f7函數(shù)上,IBSAS算法尋優(yōu)速度遠(yuǎn)高于其余4種算法,分別歷時(shí) 3 285、2 643、2 375 次迭代,其余4種算法中最快則需 4 087、3 471、3 657 次迭代,分別提高了19.62%、23.85%、35.06%;在f8函數(shù)上的性能表現(xiàn)是兩者差距最小的一次,IBSAS算法歷時(shí) 2 946 次迭代,其余算法中最快完成搜索的PSO算法則需 3 679 次迭代.總的來說,IBSAS算法在針對多峰函數(shù)上的優(yōu)化效率全面優(yōu)于傳統(tǒng)算法.
2.3 基于IBSAS算法的深度學(xué)習(xí)模型優(yōu)化
隨機(jī)產(chǎn)生的初始權(quán)重與閾值極可能導(dǎo)致IDRN模型陷入局部最優(yōu)問題,導(dǎo)致最終的收斂結(jié)果不理想.為解決這一問題,采用IBSAS算法對神經(jīng)網(wǎng)絡(luò)的初始權(quán)重與閾值進(jìn)行優(yōu)化,優(yōu)化流程如圖7所示.
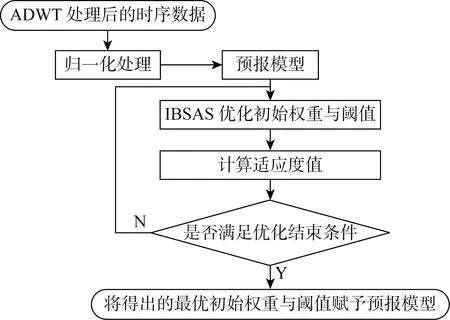
圖7 IBSAS算法優(yōu)化IDRN流程圖Fig.7 Optimization of IDRN by IBSAS
對比BAS、PSO、SA、BSAS算法對IDRN的優(yōu)化效果,所有算法均設(shè)置6 000次迭代,每種算法在優(yōu)化過程中的適應(yīng)度收斂曲線如圖8所示.
IBSAS、PSO、BSAS算法的種群規(guī)模均為50,IBSAS、BSAS、BAS算法的初始步長均為0.35,BSAS 的步長衰減系數(shù)均為0.95,每種算法均由同一隨機(jī)種子完成初始化,IDRN模型中總計(jì)12 778 516 個(gè)初始權(quán)重與閾值待優(yōu)化.
IDRN的參數(shù)數(shù)量遠(yuǎn)遠(yuǎn)超過8個(gè)測試函數(shù)的參數(shù)個(gè)數(shù),輸入與輸出之間的映射關(guān)系也更復(fù)雜,因此算法間的優(yōu)化效率差異愈發(fā)明顯.從結(jié)果來看,IBSAS、BAS、BSAS、SA、PSO的fbest收斂值分別為0.030 49、 0.095 03、0.085 02、0.106 37、0.084 31,可見 IBSAS的優(yōu)化效果遠(yuǎn)好于其余4種算法.優(yōu)化過程中,IBSAS算法經(jīng)歷了兩次約400次迭代的停滯,瓶頸期后收斂速度略有下降,這一方面是因?yàn)閮?yōu)化過程中IBSAS算法兩次陷入局部最優(yōu),但都成功脫離;另一方面,收斂速度的下降是由步長衰減因子根據(jù)當(dāng)前的優(yōu)化進(jìn)程自適應(yīng)地調(diào)節(jié)搜索范圍,避免錯(cuò)過全局最優(yōu)解.其余4種算法的收斂值均在[0.084 3, 0.107 0]區(qū)間內(nèi),說明算法在fbest下降至這一區(qū)間時(shí)落入局部最優(yōu)陷阱或因搜索步長過大而錯(cuò)過全局最優(yōu)解,相比之下,IBSAS算法很好地彌補(bǔ)了這些缺陷.
圖9給出了經(jīng)以上5種算法優(yōu)化后的IDRN模型與未優(yōu)化的IDRN模型分別在訓(xùn)練集與測試集上的性能表現(xiàn),訓(xùn)練輪次均為 3 000 次,學(xué)習(xí)率均為0.001.

圖9 優(yōu)化與未優(yōu)化模型訓(xùn)練與測試過程的對照Fig.9 Comparison of training and testing process of optimized and unoptimized models
5種算法中,IDRN模型經(jīng)IBSAS算法優(yōu)化后的性能提升最為顯著,在訓(xùn)練集上,IBSAS算法將模型的E值降低至僅為 0.008 44,而其余算法中優(yōu)化效果最好的BSAS算法僅將E值降至 0.098 89,模型的收斂速度也略有提高;就模型測試而言,IBSAS 算法將E值降至 0.009 8,其余算法中優(yōu)化效果最佳的BSAS算法僅將E值降至 0.131 92, IBSAS-IDRN 的收斂速度也顯著高于其余模型.因數(shù)據(jù)集中螺旋槳的幾何形狀差異較大,模型的E值在收斂過程中處于波動(dòng)狀態(tài),但I(xiàn)BSAS-IDRN的E值振幅遠(yuǎn)小于其余模型,說明IBSAS-IDRN的性能更加穩(wěn)定.
2.4 IDRN模型性能試驗(yàn)
為進(jìn)一步對比IDRN模型的性能,分別建立了基于深度卷積神經(jīng)網(wǎng)絡(luò)(DCNN)的模型與傳統(tǒng)深度殘差神經(jīng)網(wǎng)絡(luò)(DRN)模型進(jìn)行對照試驗(yàn),采用網(wǎng)格搜索法確定模型的超參數(shù),應(yīng)用IBSAS算法對其初始權(quán)重與閾值進(jìn)行優(yōu)化,因此,DCNN與DRN的結(jié)構(gòu)針對本文數(shù)據(jù)集已調(diào)至最優(yōu),與IDRN對比時(shí),可以排除非模型結(jié)構(gòu)的影響,訓(xùn)練輪次為 3 000.IDRN與DCNN、DRN在訓(xùn)練與測試過程上的性能表現(xiàn)如圖10和表4所示.表中:Etrain和Etest分別為模型訓(xùn)練與測試中的MSE收斂值.
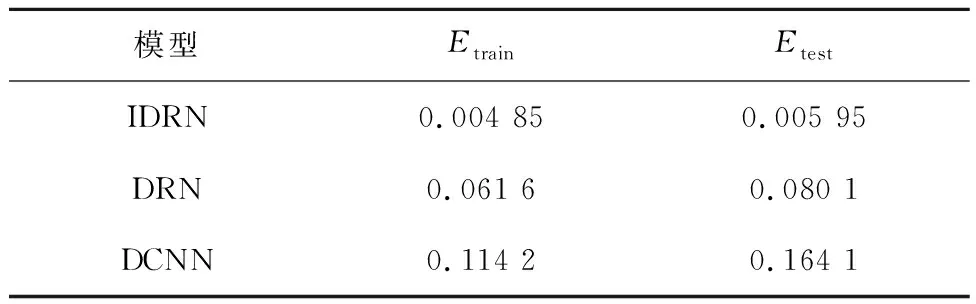
表4 IDRN、DRN、DCNN在訓(xùn)練與測試中的MSE收斂值Tab.4 Convergence value of MSE of IDRN, DRN, and DCNN in the training and test
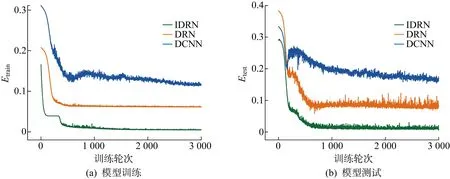
圖10 IDRN、DRN、DCNN的性能對比Fig.10 Performance comparison of IDRN, DRN, and DCNN
由圖10可知,IDRN在模型訓(xùn)練與測試時(shí)的性能表現(xiàn)明顯優(yōu)于DRN與DCNN:IDRN的收斂速度略快于其余模型,在訓(xùn)練與測試過程中DCNN的E值出現(xiàn)大幅的波動(dòng),而IDRN僅在初期存在小幅波動(dòng).由表4可知,IDRN的Etrain與Etest分別為 0.004 85 與 0.005 95,遠(yuǎn)低于DRN與DCNN,這說明IDRN模型具備更強(qiáng)的擬合能力,一方面是因?yàn)闅埐钸B接方式使模型的深度較DCNN有了大幅提高,另一方面是因?yàn)椴⑿杏?jì)算使模型可以從不同尺度提取數(shù)據(jù)特征.
IDRN模型的Etrain與Etest之間的差值也遠(yuǎn)小于DRN和DCNN,這表明IDRN在不同數(shù)據(jù)上的性能表現(xiàn)差異不大,其過擬合程度遠(yuǎn)低于DRN與 DCNN.
為檢驗(yàn)IDRN對數(shù)據(jù)集之外的螺旋槳敞水水動(dòng)力性能的預(yù)測能力,選取數(shù)據(jù)集之外的已公開幾何參數(shù)的標(biāo)準(zhǔn)槳:KP505與B4-70為例[33-34],KP505槳與數(shù)據(jù)集中的任何槳均不屬于同一系列,而B4-70槳與B4-55、B4-40槳同屬于B型螺旋槳,全面考察模型的普適性與有效性、可行性.兩者的幾何參數(shù)如表5所示.表中:S(0.7R)、b/D(0.7R)、tm/b(0.7R)和fm/b(0.7R)分別為0.7R處的側(cè)斜角、無因次弦長、最大厚度比與拱度比.用經(jīng)IBSAS算法優(yōu)化后的IDRN預(yù)測該槳的敞水性能,并與CFD法[34-35]、BP神經(jīng)網(wǎng)絡(luò)以及敞水試驗(yàn)值[34,36]對比.

表5 KP505與B4-70的主要幾何參數(shù) Tab.5 Main geometrical parameters of KP505 and B4-70
選擇BP神經(jīng)網(wǎng)絡(luò)模型(BP Model, BPM)進(jìn)行對照試驗(yàn)是因?yàn)樗陬A(yù)測特定槳的敞水性能方面已獲得眾多學(xué)者的應(yīng)用,BPM的超參數(shù)由網(wǎng)格搜索法確定.利用IBSAS算法對初始權(quán)重與閾值進(jìn)行優(yōu)化,并基于KP505與B4-70的敞水試驗(yàn)值進(jìn)行模型訓(xùn)練.
IDRN與BPM、CFD對B4-70的敞水性能預(yù)測值及其敞水試驗(yàn)值的對比如圖11所示,IDRN預(yù)測的KT與10KQ的相對誤差分布如圖12所示.
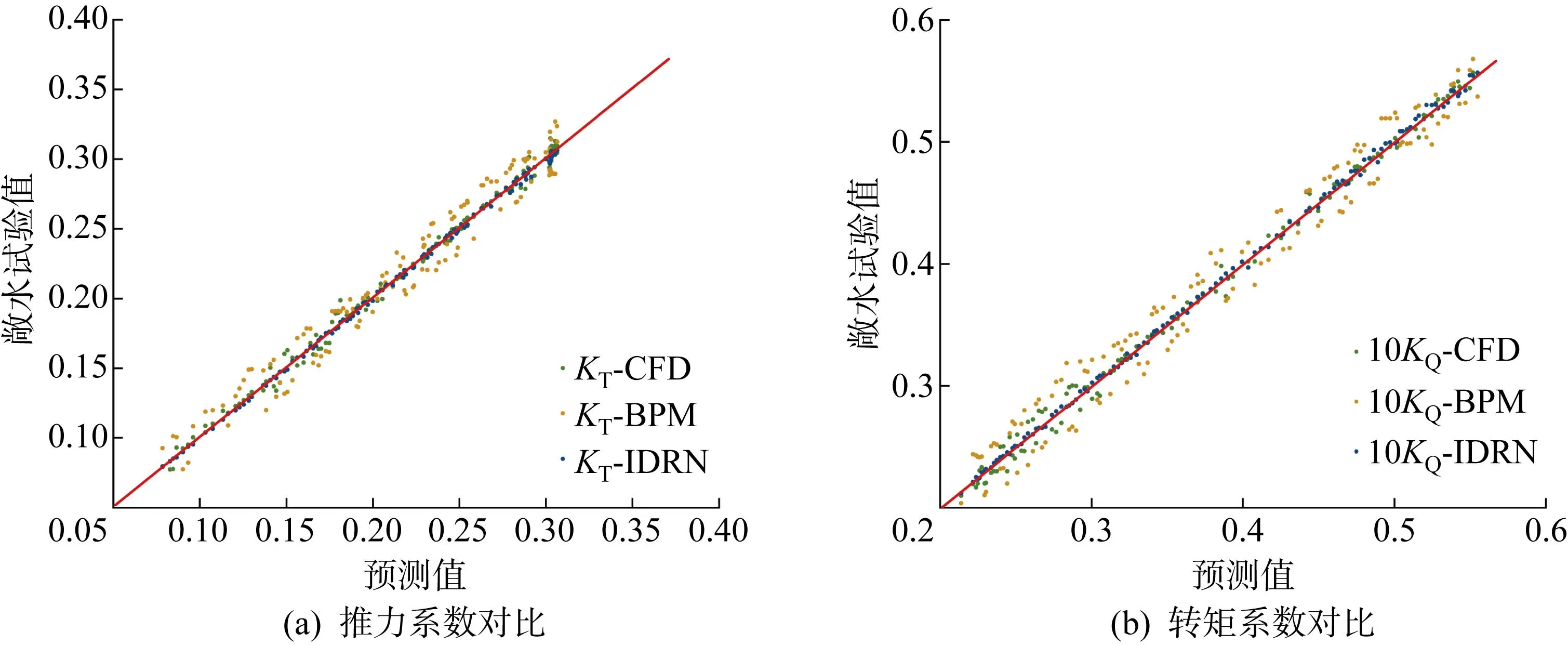
圖11 IDRN、CFD法、BPM對B4-70的預(yù)測值與其敞水試驗(yàn)值的對比Fig.11 Comparison of the predicted values of B4-70 by IDRN, CFD, and BPM with the measured value of open water test
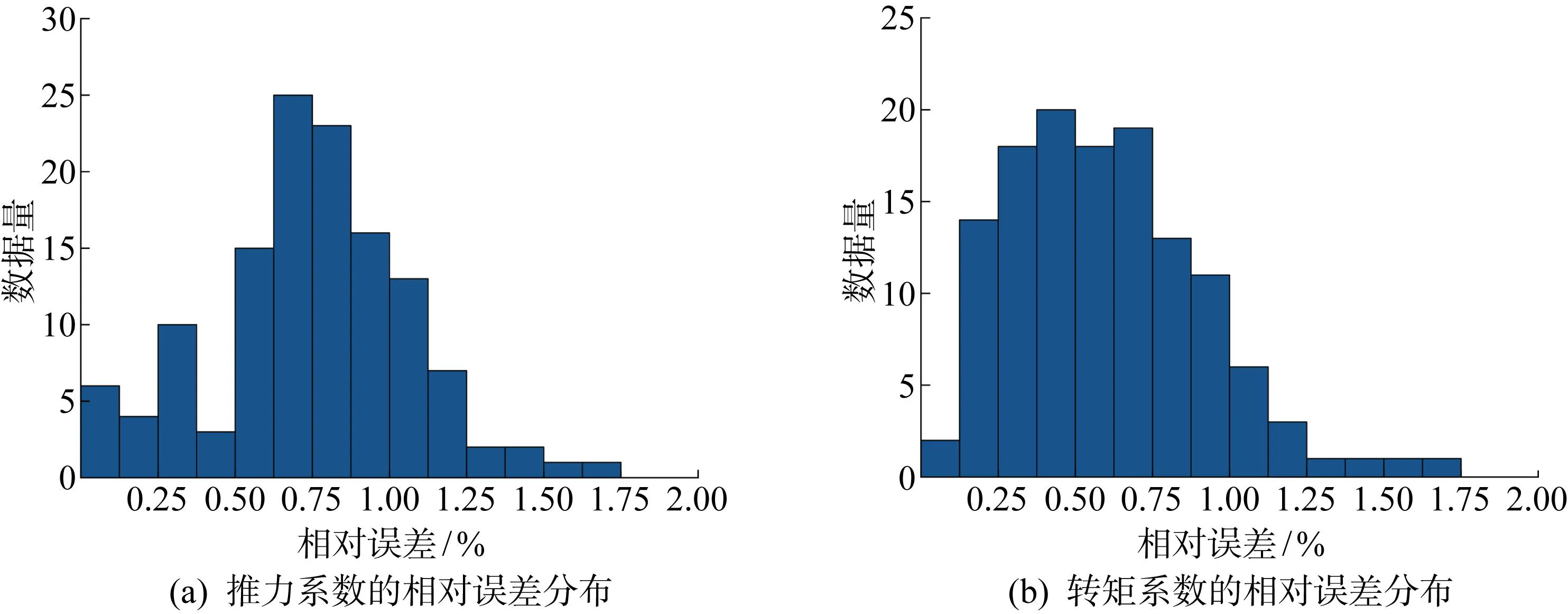
圖12 IDRN對B4-70的預(yù)測值的相對誤差分布Fig.12 Distribution of relative error of the value predicted of B4-70 by IDRN
圖11中,選取進(jìn)速系數(shù)J在區(qū)間[0.1, 0.9]內(nèi)共128個(gè)工況下對應(yīng)的KT與10KQ值,紅線為完美回歸線.B4-70與數(shù)據(jù)集中的B4-40和B4-55同屬于B型螺旋槳,本實(shí)驗(yàn)旨在考察模型與數(shù)據(jù)集的有效性,結(jié)果表明,IDRN的平均預(yù)測精度顯著高于BPM,所有工況下的預(yù)測值與試驗(yàn)值吻合度極高,預(yù)測值的最大相對誤差僅為1.74%,在KT與10KQ的預(yù)測值中均僅有2個(gè)工況的相對誤差大于1.5%.由圖12可知,KT與10KQ的相對誤差主要集中在0.5%~1.0%,這表明IDRN的預(yù)測精度與穩(wěn)定性均遠(yuǎn)好于BPM;CFD的預(yù)測結(jié)果與試驗(yàn)值的吻合度較高,最大相對誤差僅為3.17%,在KT與10KQ的預(yù)測值中分別僅有2個(gè)和3個(gè)工況的相對誤差超過3%,可見,對于數(shù)據(jù)集中的系列螺旋槳,即使該系列中某螺旋槳不在數(shù)據(jù)集之中,IDRN依舊能夠保持極高的預(yù)測精度與穩(wěn)定性,精度甚至略高于CFD,這表明IDRN與數(shù)據(jù)集具備極高的可行性與有效性.
IDRN與BPM、CFD對KP505的敞水性能預(yù)測值與其敞水試驗(yàn)值的對比如圖13所示,IDRN預(yù)測KP505的KT與10KQ的相對誤差分布如圖14所示.
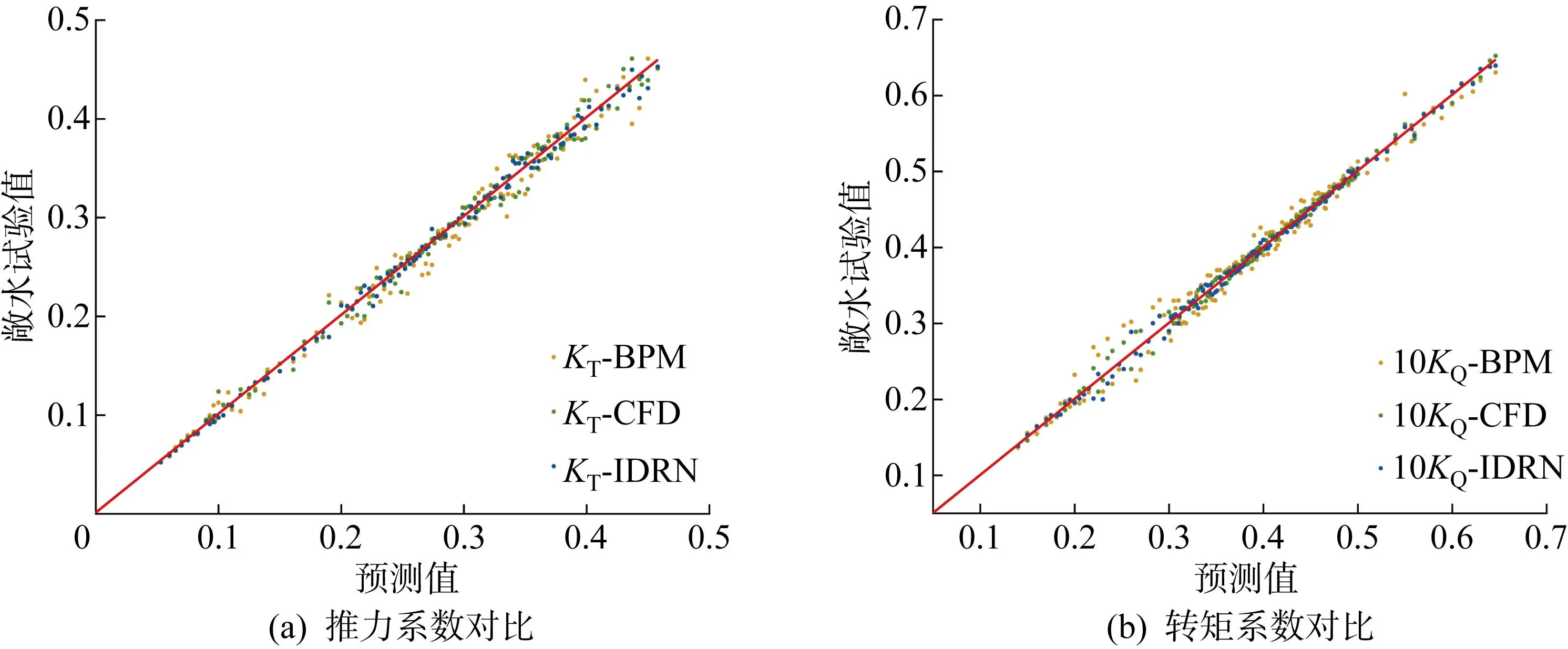
圖13 IDRN、CFD法、BPM對KP505的預(yù)測值與其敞水試驗(yàn)值的對比Fig.13 Comparison of the predicted values of KP505 by IDRN, CFD, and BPM with the measured value of open water test
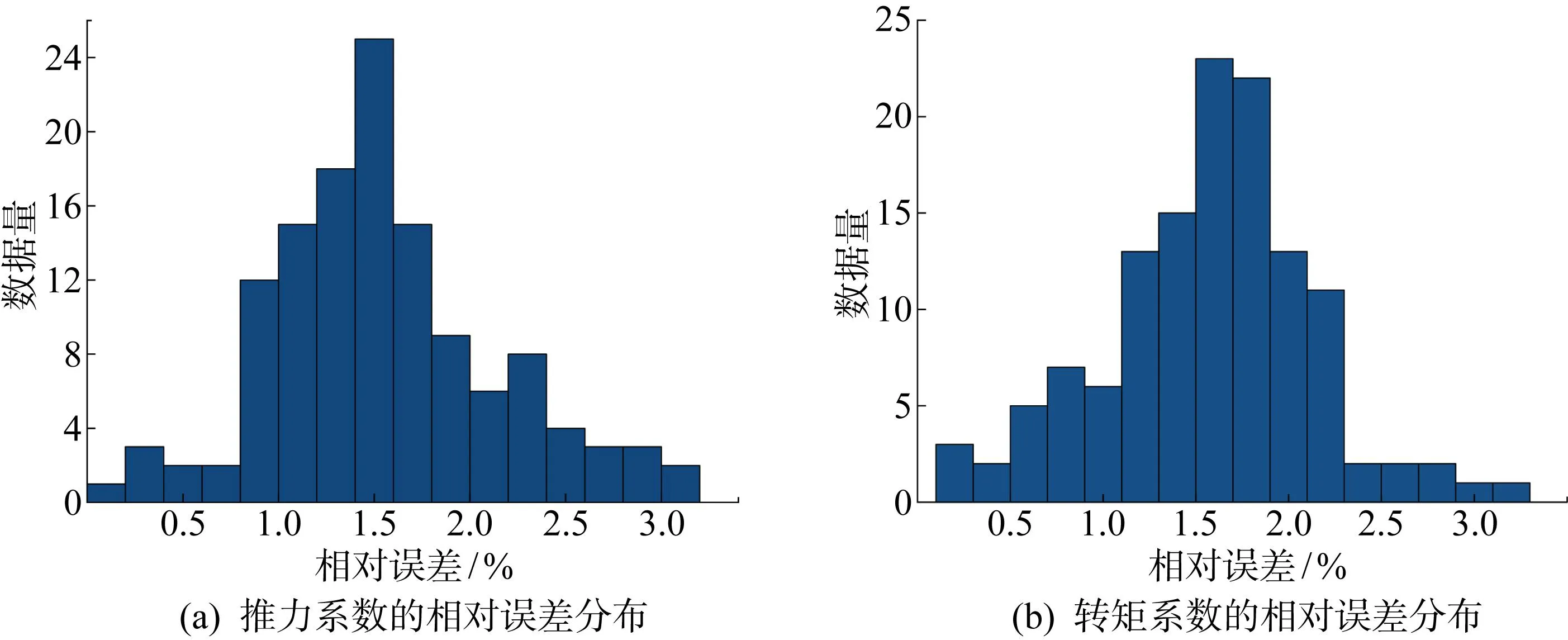
圖14 IDRN對KP505的預(yù)測值的相對誤差分布Fig.14 Distribution of relative error of the value predicted of KP505 by IDRN
KP505與數(shù)據(jù)集中所有螺旋槳均不屬于同一系列槳,本實(shí)驗(yàn)旨在考察IDRN模型的穩(wěn)定性與普適性.如圖14所示,IDRN的預(yù)測值與敞水試驗(yàn)值的平均相對誤差明顯小于BPM,預(yù)測值的最大相對誤差為3.12%,KT和10KQ的預(yù)測值中均僅有2個(gè)工況的相對誤差超過3%,可見IDRN的精度與穩(wěn)定性遠(yuǎn)好于BPM;CFD的預(yù)測值與敞水試驗(yàn)值吻合度較高,所有工況的相對誤差均小于4%,在KT和10KQ的預(yù)測值中分別僅有2個(gè)和4個(gè)點(diǎn)相對誤差超過3%,表現(xiàn)與IDRN相近.由圖12可知,IDRN的相對誤差主要集中在1%~2%的范圍內(nèi),與預(yù)測B4-70敞水性能的實(shí)驗(yàn)相比,預(yù)測精度略有下降,但仍舊保持在與CFD基本持平的水平,預(yù)測穩(wěn)定性依舊極佳,證明IDRN對預(yù)測不屬于數(shù)據(jù)集中任何系列槳的某一螺旋槳依舊保有較高的精度,說明IDRN對槳葉幾何參數(shù)與敞水性能間的映射關(guān)系的擬合度極高,表明IDRN模型具有極高的普適性與穩(wěn)定性.
總的來說,CFD與IDRN的預(yù)測表現(xiàn)十分接近,但在以上的2個(gè)實(shí)驗(yàn)中,IDRN完成1個(gè)工況計(jì)算的平均用時(shí)僅為0.175 s,遠(yuǎn)小于CFD的計(jì)算周期,可以認(rèn)為基本滿足實(shí)時(shí)預(yù)報(bào)的需求.IDRN突破了傳統(tǒng)CNN與BP神經(jīng)網(wǎng)絡(luò)在預(yù)測精度與預(yù)測范圍的局限,使深度學(xué)習(xí)在螺旋槳設(shè)計(jì)階段具備更高的工程意義.
3 結(jié)語
本文提出的IDRN,在殘差連接結(jié)構(gòu)的基礎(chǔ)上與Inception結(jié)構(gòu)相結(jié)合,大幅增加了網(wǎng)絡(luò)的深度與寬度,使模型具備從多個(gè)不同尺度提取數(shù)據(jù)特征的能力,實(shí)現(xiàn)預(yù)測不同類型螺旋槳的敞水性能.
提出IBSAS算法,并開展優(yōu)化性能研究,研究表明IBSAS算法比傳統(tǒng)算法具備更好的優(yōu)化性能,經(jīng)其優(yōu)化后的IDRN模型的收斂速度、精度、穩(wěn)定性均大幅提高,過擬合問題也得以解決.
以KP505和B4-70槳為例,考察IDRN模型對數(shù)據(jù)集之外的螺旋槳的預(yù)測能力,驗(yàn)證其有效性與普適性.研究表明:模型預(yù)測值與實(shí)驗(yàn)值吻合度極高,偏差的分布十分集中,IDRN具備良好的預(yù)測穩(wěn)定性,模型性能遠(yuǎn)高于BP神經(jīng)網(wǎng)絡(luò)模型,與CFD法幾乎等同,在預(yù)測數(shù)據(jù)集內(nèi)某系列槳性能時(shí)精度甚至略高于CFD法,對單工況預(yù)測的計(jì)算周期極短,可忽略不計(jì).綜上,基于本文方法建立的預(yù)測模型可以實(shí)現(xiàn)不同螺旋槳敞水性能的實(shí)時(shí)準(zhǔn)確預(yù)報(bào),提出的IBSAS算法在多參數(shù)模型的優(yōu)化效率較傳統(tǒng)算法有顯著提高.
日后將加入與復(fù)雜工況相關(guān)的變量,讓設(shè)計(jì)者們準(zhǔn)確掌握螺旋槳復(fù)雜工況下的性能,便于進(jìn)行優(yōu)化設(shè)計(jì).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26