基于卡爾曼和擴展卡爾曼濾波的耦合載波跟蹤方法*
2024-03-04 02:05:34付學瀚燕賀云朱立東蒯小燕郭孟澤
移動通信 2024年1期
付學瀚,燕賀云,朱立東,蒯小燕,郭孟澤
(電子科技大學通信抗干擾全國重點實驗室,四川 成都 611731)
0 引言
高動態環境下,通信雙方的相對運動速度較高,此時,反映到信號層面上則表現為強多普勒效應,即接收信號存在較大的載波頻率偏移且載波頻偏具有一定的高階變化率,為了精確跟蹤載波相位,傳統的方法是將鎖頻環和鎖相環聯合使用[1-3],通過增大環路帶寬來適應大范圍的多普勒頻偏,然而環路帶寬的加大又勢必導致載波跟蹤精度的降低,尤其當跟蹤環路處于低信噪比通信環境中時,噪聲的引入甚至會導致載波跟蹤環失鎖。因此,在低信噪比高動態環境下,傳統載波跟蹤環路的可承受的動態范圍與跟蹤精度之間需要進行權衡[3-6]。
在此背景下,卡爾曼濾波(KF,Kalman Filter)[7]在載波跟蹤領域的應用受到了很大的關注。文獻[8-10]對基于卡爾曼濾波的載波跟蹤環路進行了性能分析,表明基于卡爾曼濾波的載波跟蹤環路可以自適應地改變環路帶寬,因此具有更好的跟蹤性能。文獻[11-12]考慮了數控振蕩器(NCO,Numerical Controlling Oscillator)的反饋,提出了基于鑒相器輔助的卡爾曼濾波跟蹤環路,但跟蹤性能受到鑒相器的限制。文獻[13]給出了基于擴展卡爾曼濾波(EKF,Extended Kalman Filter)[14]的載波跟蹤算法,但是沒有考慮積分-清除[15]處理后的情況。文獻[16]提出了一種基于無跡卡爾曼濾波(UKF,Unscented Kalman Filter)[17]的載波跟蹤算法,在低信噪比環境下跟蹤性能相較于傳統載波跟蹤算法有很大提高,但跟蹤精度還有進一步的提升空間。
為了進一步提高低信噪比高動態環境下載波跟蹤算法的跟蹤性能,本文在傳統鎖頻環輔助鎖相環的結構基礎上,分別以卡爾曼濾波器代替鎖頻環的環路濾波器和擴展卡爾曼濾波器代替鎖相環的環路濾波器和鑒相器設計了一種新的耦合載波跟蹤環路。最后通過仿真驗證,證明本文提出環路的跟蹤性能優異,且顯著優于傳統環路。
1 基于卡爾曼濾波與擴展卡爾曼濾波相結合的載波跟蹤環路
本文中,不考慮數據位的影響,將接收信號建模為數字中頻載波信號。基于卡爾曼濾波與擴展卡爾曼濾波相結合的載波跟蹤環路結構如圖1 所示:
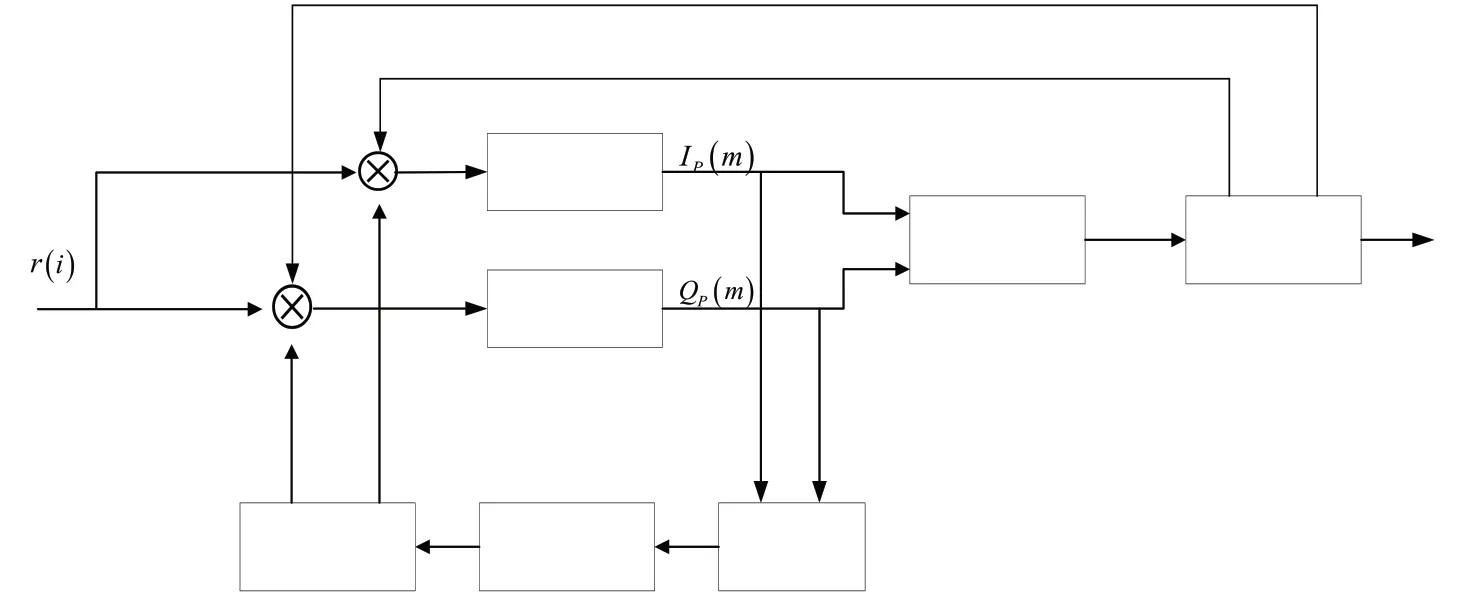
圖1 基于卡爾曼濾波與擴展卡爾曼濾波相結合的載波跟蹤環路結構
假設接收到的數字中頻信號為:
其中,A為輸入信號載波幅度,fIF為輸入信號載波的中頻頻率,fd為多普勒頻偏,φ0為輸入信號載波的初始相位,n(i)為高斯白噪聲。
輸入信號經過混頻器與積分器后,結果為:
其中,Δfd為輸入信號載波和本地生成載波間的頻率差,N為每次相干積分所需的采樣點數,Ts為采樣時間,為輸入信號載波與本地生成載波在相干積分時間內的平均相位差。
基于卡爾曼濾波的鎖頻環,需要使用鑒頻器來鑒別輸入信號載波的多普勒頻偏與其估計之間的誤差。在本文中,采用在高信噪比與低信噪比環境下均有較好鑒頻特性的四象限反正切鑒頻器[18]。叉積cross、點積dot與鑒頻計算方法的數學表達式為:
2 系統方程設計
2.1 基于卡爾曼濾波的鎖頻環系統方程設計
卡爾曼濾波實質上是貝葉斯估計原理對于觀測向量在基于線性最小均方誤差準則情況下的遞歸解,即理論上其濾波輸出為輸入信號多普勒頻偏的最優估計值。
根據卡爾曼濾波的線性化方法,分別對通信終端不存在徑向加加速度和存在徑向加加速度的兩種高動態運動模型,分別推導了頻率斜升信號模型和頻率加速信號模型系統方程。
(1)頻率斜升信號的系統方程
不存在徑向加加速度的運動模型,其多普勒頻偏可以建模為頻率斜升信號模型:
其中,fv為輸入信號初始時刻的多普勒頻率,fa為多普勒頻率一階變化率。
對于不存在徑向加加速度的運動模型,可以建立二階線性系統方程來估計多普勒頻偏[4,7]。卡爾曼濾波在鎖頻環中的狀態方程和觀測方程可以表示為:
系統的狀態轉移矩陣和測量矩陣表示為:
卡爾曼濾波分為預測和校正過程,根據式(8)和式(9)所確定的狀態方程和觀測方程,卡爾曼濾波的具體過程如下:
預測過程:
校正過程:
其中,K為卡爾曼濾波增益,Pm為狀態向量的預測協方差矩陣,Q 和R 分別為W 和V 的協方差矩陣,表示為:
(2)頻率加速信號的系統方程
存在徑向加加速度的運動模型,其多普勒頻偏可以建模為頻率加速信號模型:
對于存在徑向加加速度的運動模型,可以建立三階線性系統方程來估計多普勒頻偏[4,7]。此時,狀態方程和觀測方程的表示形式同式(8) 和式(9)。狀態向量變為,分別表示多普勒頻偏、多普勒頻偏一階變化率和二階變化率。
系統的狀態轉移矩陣和測量矩陣表示為:
卡爾曼濾波過程同式(12) 至式(16),此時觀測噪聲協方差矩陣R 同式(18),噪聲協方差矩陣Q 表示為:
2.2 基于擴展卡爾曼濾波的鎖相環系統方程設計
在低信噪比環境下,無論是對于頻率加速信號還是頻率斜升信號,基于卡爾曼濾波器鎖頻環的輸出含有多普勒一階變化率的殘差,因此,還需要具有三階卡爾曼濾波器的鎖相環來跟蹤載波相位。相較于傳統卡爾曼濾波,擴展卡爾曼濾波可以直接以積分器的輸出來作為觀測向量,且基于擴展卡爾曼濾波的跟蹤環路不需要鑒別器,環路性能不受鑒別器的限制,能夠接受更高的動態范圍且更能適應低信噪比環境,因此,鎖相環基于擴展卡爾曼濾波來設計。
假設鎖相環輸入信號在第m-1 個積分時間段T初始時刻的相位為,載波多普勒頻偏fd(m-1),多普勒一階變化率fa(m-1),則輸入信號在第m個積分時間段初始時刻相位為:
由此,可以將狀態方程表示為[19]:
擴展卡爾曼濾波直接以積分輸出結果作為觀測量來建立觀測模型,因此,觀測方程表示為:
擴展卡爾曼濾波算法中線性化觀測矩陣Hm為:
擴展卡爾曼濾波同樣分為預測和校正過程,根據式(31) 和式(34) 所確定的狀態方程和觀測方程,擴展卡爾曼濾波的具體過程如下:
預測過程:
校正過程:
其中,過程噪聲協方差矩陣Q 同鎖頻環中三階卡爾曼濾波器的形式相同,觀測噪聲協方差矩陣R 表示為:
根據濾波結果,調整本地生成載波的相位和頻率。用于第m+1 個積分時間段的本地生成載波在中頻頻率基礎上的頻率偏移和第m+1 個積分時間段的本地生成載波初始時刻相位為:
3 仿真分析
為了驗證本文所提出的載波跟蹤環路的性能,分別從頻率斜升信號和頻率加速信號兩種信號模型進行仿真驗證,并分別與傳統跟蹤環路進行性能比較。系統的仿真參數如表1 所示:
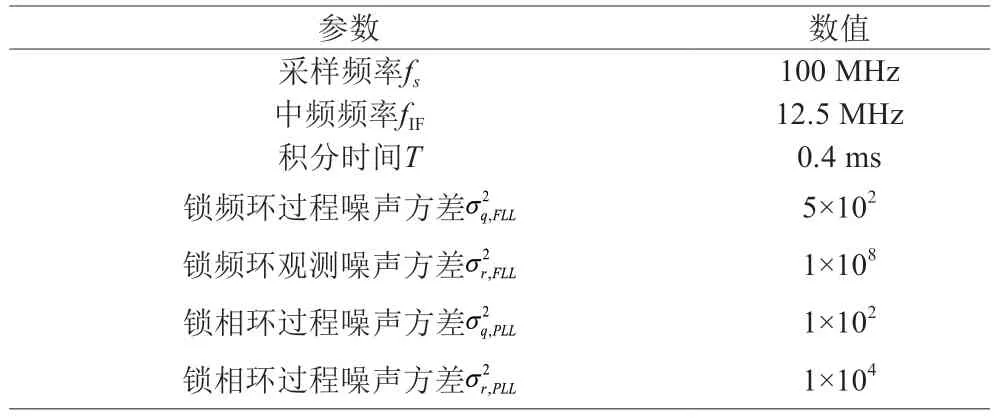
表1 系統仿真參數[20]
3.1 對頻率斜升信號的跟蹤性能
輸入信號的初始多普勒頻率取為1 kHz,多普勒一階變化率取為10 kHz/s,信噪比為-20 dB。在高動態環境下,傳統方法通常使用基于環路濾波器的二階鎖頻環結合三階鎖相環的載波跟蹤環路來跟蹤頻率斜升信號,因此,在仿真中將本文提出的載波跟蹤環路同傳統二階鎖頻環結合三階鎖相環的載波跟蹤環路。多普勒頻率跟蹤誤差和相位跟蹤誤差如圖2 和圖3 所示:

圖2 頻率跟蹤誤差
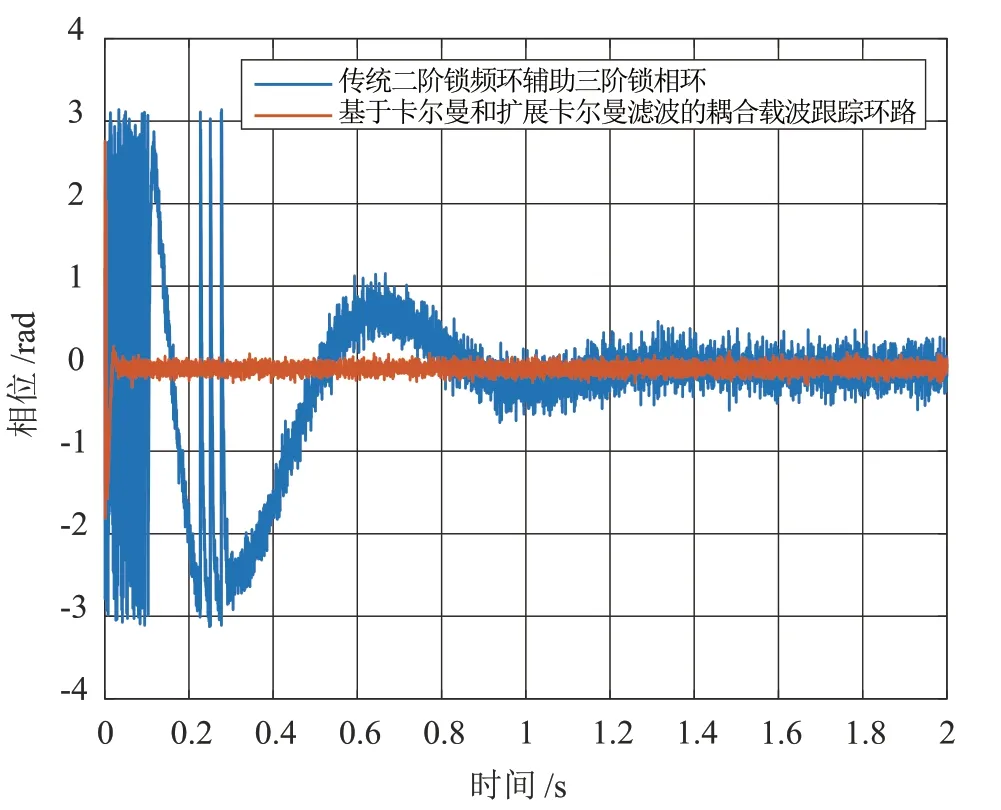
圖3 相位跟蹤誤差
如圖2 和圖3 所示,本文所提出的載波跟蹤環路跟蹤性能穩定,跟蹤精度高且收斂速度很快,環路收斂時間小于60 ms,頻率跟蹤誤差在5 Hz 以內,相位跟蹤誤差在0.25 rad以內,而傳統的二階鎖頻環結合三階鎖相環的跟蹤環路的收斂時間為1.2 s,且頻率和相位跟蹤誤差波動較大,最大可達到22 Hz 和0.45 rad。所以對頻率斜升信號跟蹤時,本文所提出的載波跟蹤環路相較于傳統環路跟蹤性能有較大提升。
圖4 和圖5 為環路達到收斂狀態時,不同信噪比下的頻率和相位的RMSE(均方根誤差曲線),比較了本文提出的載波跟蹤環路和傳統的二階鎖頻環結合三階鎖相環的跟蹤環路在不同信噪比下的跟蹤性能。在信噪比-20~-10 dB 的范圍內,由系統熱噪聲引起的頻率和相位的均方根誤差不斷減小,高動態環境導致的動態應力誤差為誤差的主要來源。由圖4和圖5 可知,本文所提出的載波跟蹤環路跟蹤性能在低信噪比環境下顯著優于傳統的二階鎖頻環結合三階鎖相環的載波跟蹤環路。隨著信噪比的提升,傳統環路的跟蹤性能不斷接近本文所提出跟蹤環路的性能。
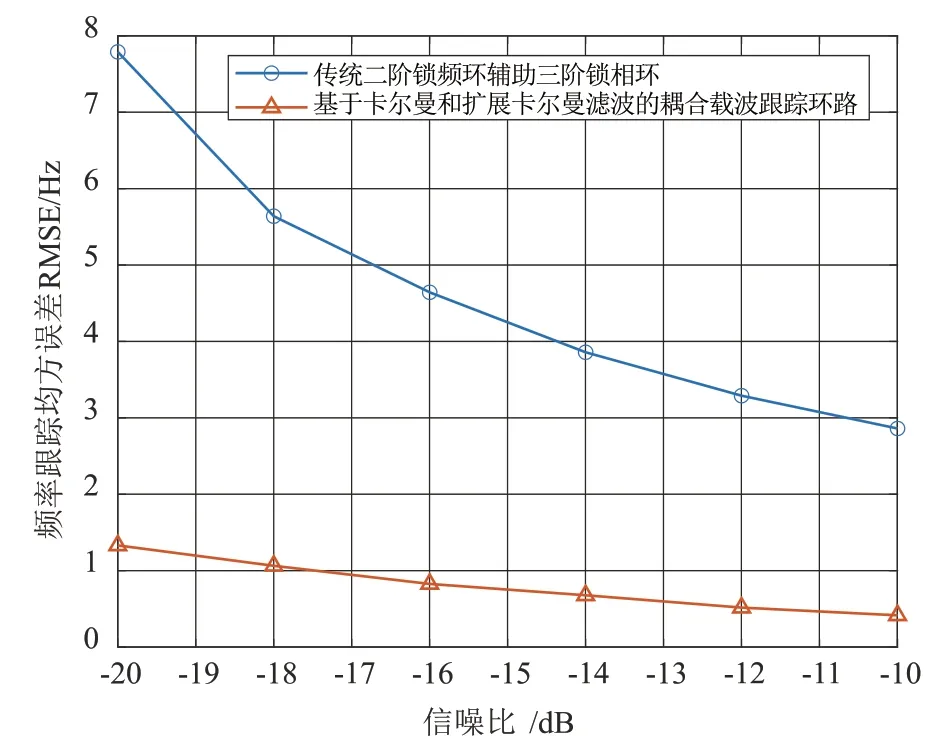
圖4 不同信噪比下頻率均方根誤差
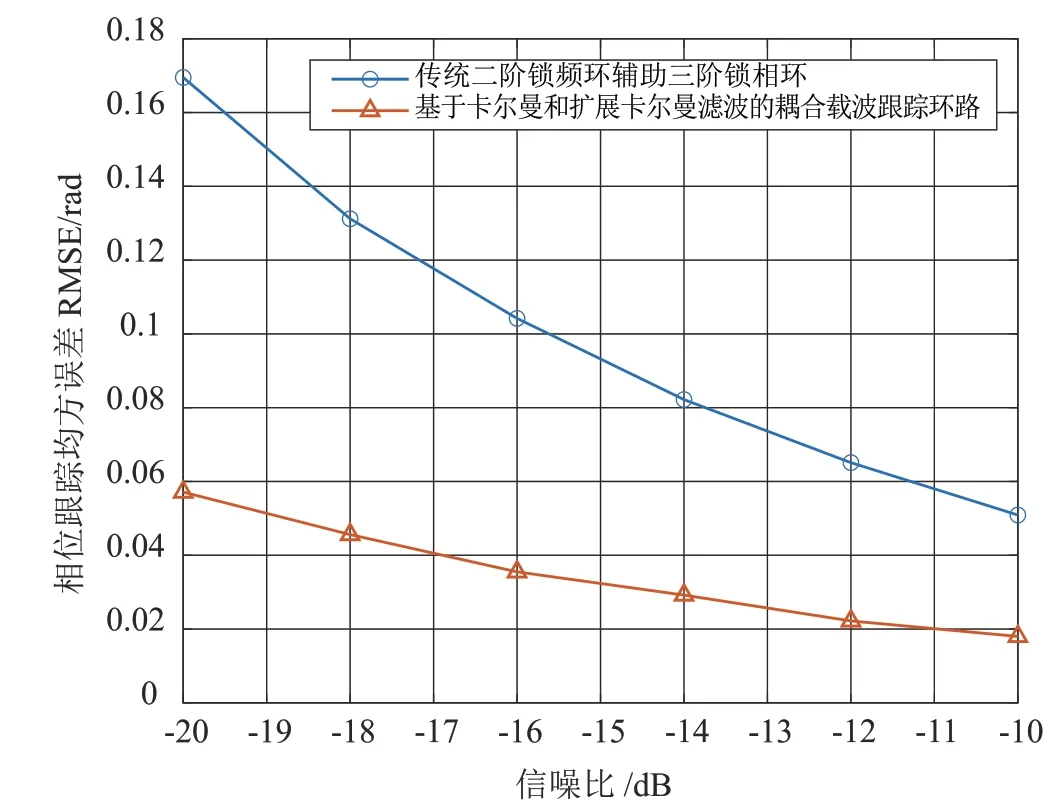
圖5 不同信噪比下相位均方根誤差
3.2 對頻率加速信號的跟蹤性能
輸入信號的初始多普勒頻率取為800 Hz,多普勒一階變化率取為10 kHz/s,多普勒二階變化率50 Hz/s2,信噪比為-20 dB。在高動態環境下,傳統方法通常使用基于環路濾波器的三階鎖頻環結合四階鎖相環的載波跟蹤環路來跟蹤頻率加速信號,因此,在仿真中將本文提出的載波跟蹤環路同傳統三階鎖頻環結合四階鎖相環的載波跟蹤環路。多普勒頻率跟蹤誤差和相位跟蹤誤差如圖6 和圖7 所示:

圖6 頻率跟蹤誤差
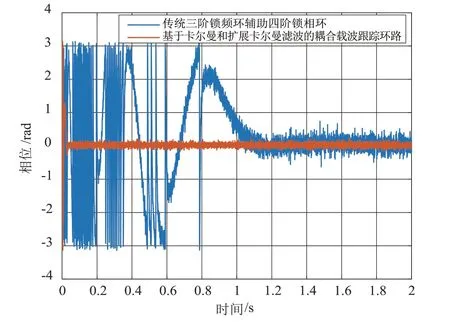
圖7 相位跟蹤誤差
如圖6 和圖7 所示,雖然環路階數提升,但本文提出的載波跟蹤環路依然可以很快收斂,環路收斂時間小于90 ms,頻率跟蹤誤差在5 Hz 以內,相位跟蹤誤差在0.22 rad 以內,且環路的跟蹤性能穩定。而傳統的三階鎖頻環結合四階鎖相環的跟蹤環路,環路收斂時間為1.2 s 左右,頻率和相位跟蹤誤差波動較大,最大可達到20 Hz 和0.5 rad,所以對頻率加速信號跟蹤時,本文所提出的載波跟蹤環路相較于傳統環路跟蹤性能同樣有較大提升。
同樣,接下來對兩種跟蹤環路在不同信噪比下的頻率和相位均方誤差進行對比。圖8 和圖9 為環路達到收斂狀態時,不同信噪比下的頻率和相位的RMSE 曲線,比較了本文提出的載波跟蹤環路和傳統的三階鎖頻環結合四階鎖相環的跟蹤環路在不同信噪比下的跟蹤性能。在信噪比-20 dB 至-10 dB 的范圍內,本文所提出的載波跟蹤環路跟蹤性能在低信噪比環境下顯著優于傳統的三階鎖頻環結合四階鎖相環的載波跟蹤環路。同樣,隨著信噪比的提升,傳統環路的跟蹤性能不斷接近本文所提出跟蹤環路的性能。
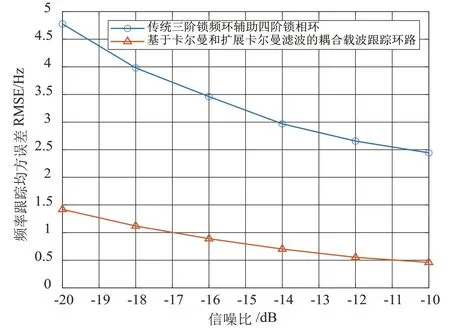
圖8 不同信噪比下頻率均方根誤差
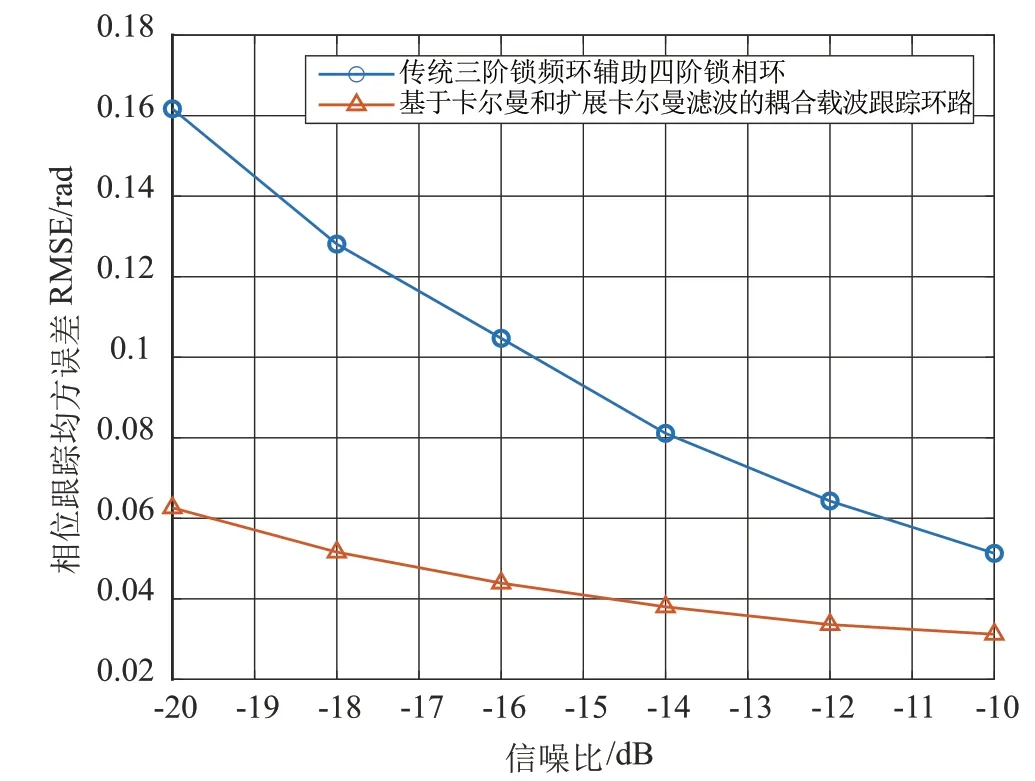
圖9 不同信噪比下相位均方根誤差
對于JPL 提出的具有代表性的高動態運動模型[21],即通信終端存在加加速度變化的場景,假設輸入信號的多普勒頻率為800 Hz,多普勒一階變化率為10 kHz/s,2~2.5 s 內多普勒二階變化率為50 Hz/s2,3.5~4 s 內多普勒二階變化率為-50 Hz/s2,其余時間多普勒二階變化率為0,仿真時長為5 s。
圖10 和圖11 展示了1.5~4.5 s 內的頻率和相位跟蹤誤差,出現加加速度變化后,本文所提出的載波跟蹤環路在失鎖后能夠很快的重新恢復收斂,收斂時間小于100 ms,相比之下,傳統環路會失鎖后環路重新恢復收斂的時間較長,至少需要100 ms。同時,本文所提出的載波跟蹤環路的相位跟蹤誤差波動也相對較小。說明本文提出的載波跟蹤環路在應對動態變化時能夠達到更好的效果。
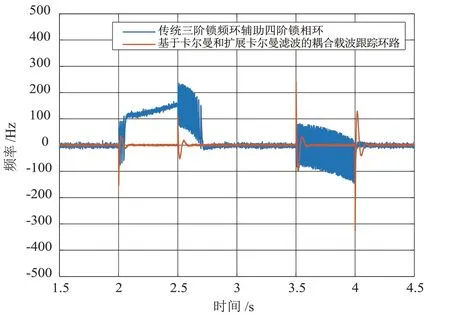
圖10 頻率跟蹤誤差
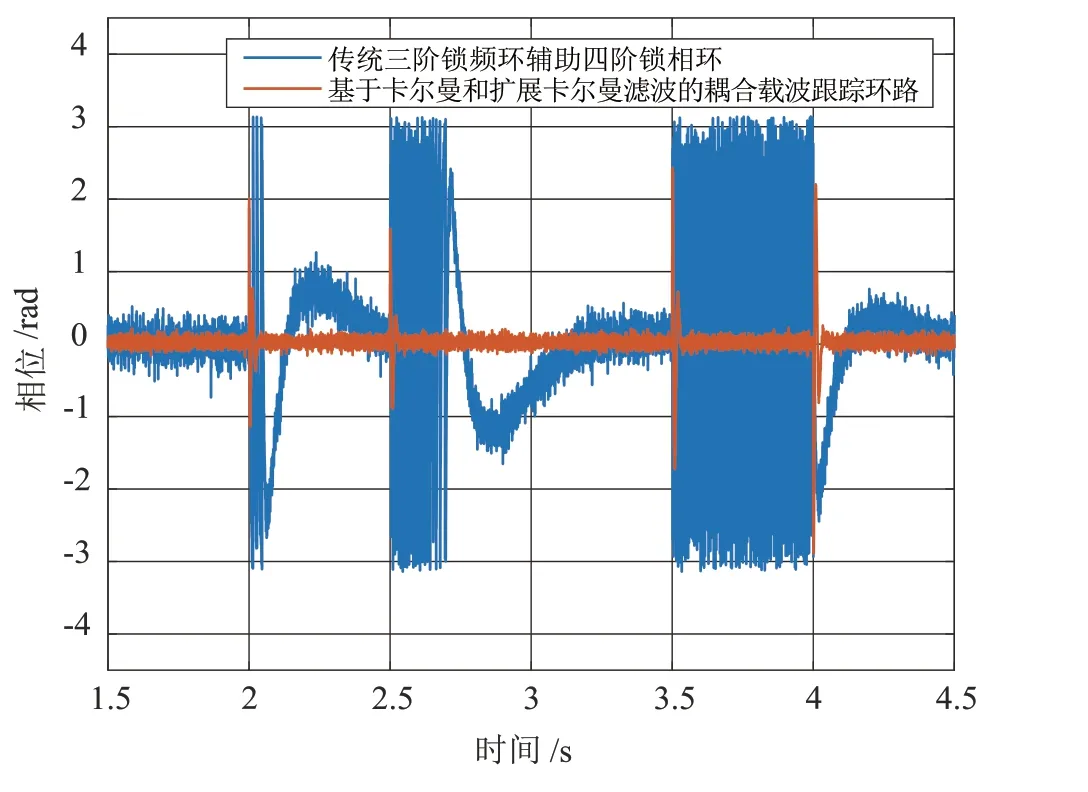
圖11 相位跟蹤誤差
4 結束語
本文提出了一種基于卡爾曼與擴展卡爾曼濾波的耦合載波跟蹤環路,將卡爾曼濾波器和擴展卡爾曼濾波器分別與鎖頻環和鎖相環結合起來,實現了低信噪比高動態環境下的載波跟蹤。仿真結果表明,該方法在低信噪比高動態環境下對于不同類型的高動態信號均有較好的跟蹤性能,即較快的收斂速度和較高的跟蹤精度。同時,相較于傳統的基于環路濾波器的鎖頻環結合鎖相環的載波跟蹤環路,該算法具有更好的跟蹤性能。經仿真驗證,在信噪比為-20 dB 條件下,該方法跟蹤頻率斜升信號收斂時間小于60 ms,跟蹤頻率加速信號收斂時間小于90 ms,對兩種信號的頻率跟蹤殘差均小于5 Hz,相位跟蹤殘差均小于0.25 rad,對于存在加加速度變化的信號,環路重新恢復收斂的時間較短,跟蹤性能顯著優于傳統環路。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
