基于高效電能管理系統(tǒng)的客車光伏技術(shù)研究
2024-03-05 06:42:22孫豐濤任建平劉偉川
客車技術(shù)與研究 2024年1期
孫豐濤, 任建平, 劉偉川
(珠海廣通汽車有限公司, 廣東 珠海 519090)
與傳統(tǒng)的燃油車相比,電動(dòng)汽車以電能驅(qū)動(dòng),具有節(jié)能環(huán)保、噪聲低等優(yōu)點(diǎn),電動(dòng)汽車的普及應(yīng)用對(duì)能源持續(xù)性及環(huán)境生態(tài)優(yōu)化具有一定作用[1-2]。而光伏太陽(yáng)能汽車是一個(gè)相對(duì)較新的概念[3],一些車企已設(shè)計(jì)了光伏概念車,如奔馳、奧迪等。這些車企在天窗上方安置了光伏太陽(yáng)能板,當(dāng)車輛處于靜止?fàn)顟B(tài)時(shí),產(chǎn)生的能量帶動(dòng)鼓風(fēng)機(jī)完成車艙內(nèi)換氣,同時(shí)能降低車艙溫度[4-6]。商用車領(lǐng)域也有光伏應(yīng)用,但極少將光伏系統(tǒng)與汽車動(dòng)力、空調(diào)系統(tǒng)等有效結(jié)合,導(dǎo)致光伏產(chǎn)生的能量利用率不高。
本文提出一種基于高效電能管理系統(tǒng)的客車光伏技術(shù),通過(guò)在電動(dòng)客車頂部布置柔性薄膜光伏板(如圖1所示),將太陽(yáng)能轉(zhuǎn)換為電能,并作為一種清潔補(bǔ)充能源提供給整車系統(tǒng),既實(shí)現(xiàn)對(duì)整車負(fù)載的直接供電、對(duì)動(dòng)力電池組充電,又降低對(duì)傳統(tǒng)能量的消耗。

圖1 客車頂部薄膜光伏
1 光伏GMPPT控制系統(tǒng)
光伏太陽(yáng)能系統(tǒng)設(shè)置有較多光伏組件,其中包括大量光伏陣列[7]。為了提高光伏陣列的輸出功率和光伏發(fā)電的整體效率,適應(yīng)于局部陰影下的全局最大功率點(diǎn)跟蹤(GMPPT)算法已成為光伏發(fā)電系統(tǒng)發(fā)展的重要技術(shù)環(huán)節(jié)[8]。傳統(tǒng)意義的最大功率點(diǎn)跟蹤(MPPT)算法已無(wú)法滿足當(dāng)前技術(shù)發(fā)展,優(yōu)化后的GMPPT算法采用電壓環(huán)、電流環(huán)分頻控制,可實(shí)現(xiàn)局部陰影下最大功率點(diǎn)快速跟蹤。
1.1 優(yōu)化后的GMPPT控制策略
局部遮擋、灰塵覆蓋、電池老化等都易造成光伏系統(tǒng)失配,會(huì)直接導(dǎo)致光伏系統(tǒng)能量轉(zhuǎn)化效率低下[9]。若出現(xiàn)局部遮擋的情況,光伏陣列的功率-電壓特性曲線會(huì)出現(xiàn)多功率極值點(diǎn)現(xiàn)象,影響最大功率點(diǎn)的跟蹤,造成光電系統(tǒng)功率損耗,間接損壞光伏組件[10]。國(guó)內(nèi)外專家對(duì)光伏發(fā)電系統(tǒng)在局部陰影條件下光伏陣列的建模和GMPPT算法進(jìn)行了大量研究,有學(xué)者通過(guò)采用實(shí)時(shí)數(shù)據(jù)測(cè)量、特殊電路配置及人工智能算法等方法來(lái)實(shí)現(xiàn)在局部遮擋情況下對(duì)光伏系統(tǒng)全局最大功率點(diǎn)的穩(wěn)定輸出[11-12]。但采用上述方法(如增加特殊電路、采用神經(jīng)網(wǎng)絡(luò)算法等)直接增加了控制系統(tǒng)的軟、硬件成本,且對(duì)系統(tǒng)處理器要求較高,不適宜大批量生產(chǎn)。
光伏組件在復(fù)雜環(huán)境下(如局部陰影情況)往往使得光伏陣列功率-電壓特性曲線呈現(xiàn)多個(gè)功率極值點(diǎn)D、C、E,如圖2所示。此時(shí),采用基于采樣數(shù)據(jù)的傳統(tǒng)MPPT 跟蹤算法,光伏組件最終會(huì)穩(wěn)定運(yùn)行在局部峰值點(diǎn)C處,然而縱觀全局,在局部陰影情況下最大功率點(diǎn)其實(shí)是D點(diǎn),因而造成系統(tǒng)局部極值點(diǎn)失效,光伏陣列實(shí)際工作在不良狀態(tài),功率嚴(yán)重失配,既造成能量損失又容易損壞光伏組件。
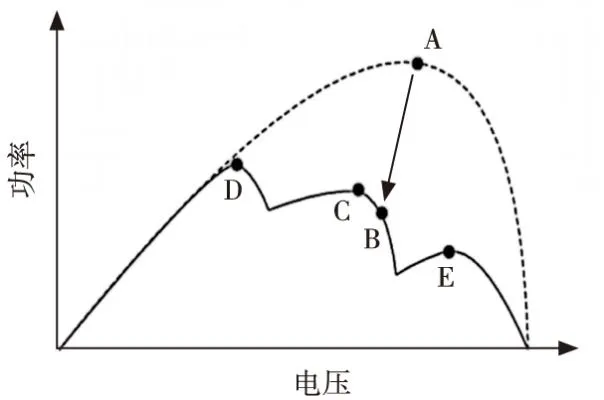
圖2 功率-電壓特性曲線
對(duì)此,本文采用一種針對(duì)局部陰影現(xiàn)象的高效率、低成本優(yōu)化GMPPT算法,實(shí)現(xiàn)局部陰影最大功率點(diǎn)的快速穩(wěn)定跟蹤,控制策略如圖3所示。
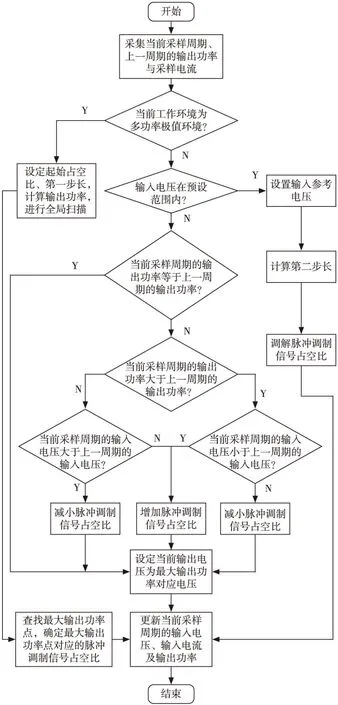
圖3 優(yōu)化GMPPT算法的控制策略
獲取當(dāng)前采樣周期與上一采樣周期的輸出功率與采樣電流,并將兩個(gè)采樣周期的輸出功率與采樣電流進(jìn)行對(duì)比分析,判斷當(dāng)前光伏發(fā)電系統(tǒng)工作環(huán)境是否為多功率極值點(diǎn)環(huán)境。若當(dāng)前環(huán)境為多功率極值點(diǎn)環(huán)境,系統(tǒng)將以預(yù)設(shè)的第一步長(zhǎng)改變脈沖調(diào)制信號(hào)的占空比,并計(jì)算出每一占空比對(duì)應(yīng)的輸出功率,查找出最大輸出功率值對(duì)應(yīng)的脈沖調(diào)制信號(hào)的占空比,將直流變換器輸出的脈沖調(diào)制信號(hào)的占空比調(diào)節(jié)為目標(biāo)占空比。
1.2 優(yōu)化后的GMPPT控制方案
圖4中基于GMPPT算法控制器接收輸入?yún)⒖茧妷阂约拜斎腚娏?穩(wěn)壓電路內(nèi)的電壓調(diào)節(jié)器輸出電壓信號(hào),該電壓信號(hào)作為PI控制器的輸入電壓Up,控制器輸出的信號(hào)作為PI控制器的輸入電壓U。PI控制器計(jì)算輸出參考電流Ipv_ref*,并將參考電流Ipv_ref*與輸入電流的信號(hào)差值輸入至電流調(diào)節(jié)器,電流調(diào)節(jié)器根據(jù)PI控制器輸出值計(jì)算第二步長(zhǎng),并將第二步長(zhǎng)輸出至脈沖調(diào)制信號(hào)產(chǎn)生電路,脈沖調(diào)制信號(hào)產(chǎn)生電路根據(jù)第二步長(zhǎng)調(diào)節(jié)輸出的脈沖調(diào)制信號(hào)的占空比,圖4為電壓環(huán)和電流環(huán)分頻控制方案。
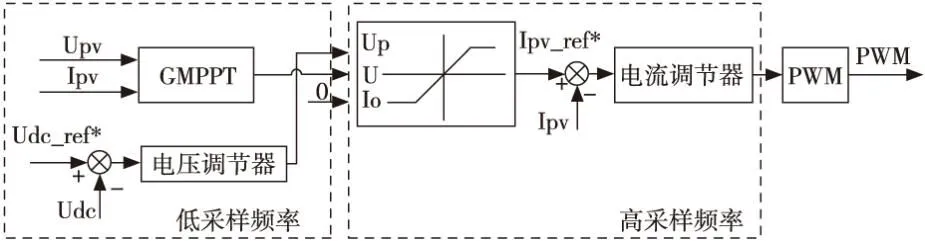
圖4 電壓環(huán)和電流環(huán)分頻控制方案
通過(guò)將輸入電壓的波動(dòng)控制在一個(gè)極小的變化范圍內(nèi),直流調(diào)節(jié)器輸出的脈沖調(diào)制信號(hào)的占空比將會(huì)較小幅度的調(diào)節(jié)。實(shí)現(xiàn)光伏發(fā)電系統(tǒng)穩(wěn)定控制的效果,保證光伏發(fā)電系統(tǒng)較穩(wěn)定地工作于最大功率點(diǎn)位置,使得光伏發(fā)電系統(tǒng)高效工作。圖5為MPPT和優(yōu)化GMPPT算法程序執(zhí)行時(shí)間。

電壓調(diào)節(jié)器與電流調(diào)節(jié)器將輸入的電壓、電流信號(hào)分頻調(diào)節(jié)控制,從而調(diào)節(jié)輸出脈沖信號(hào)占空比。采用上述方案可大幅縮減程序時(shí)間,突破常規(guī)固定應(yīng)用場(chǎng)合局限,適應(yīng)天氣變化及場(chǎng)景轉(zhuǎn)換,實(shí)現(xiàn)移動(dòng)快速跟蹤。
1.3 優(yōu)化后的GMPPT算法試驗(yàn)驗(yàn)證
本文通過(guò)橋洞陰影跟蹤試驗(yàn)(圖6),將傳統(tǒng)的MPPT算法與優(yōu)化后的GMPPT算法相對(duì)比,以驗(yàn)證上述策略方案的優(yōu)勢(shì)。

由圖6、圖7及表1可知:采用優(yōu)化后的GMPPT算法的光伏發(fā)電系統(tǒng),可實(shí)現(xiàn)局部陰影情況下最大功率點(diǎn)的快速跟蹤。
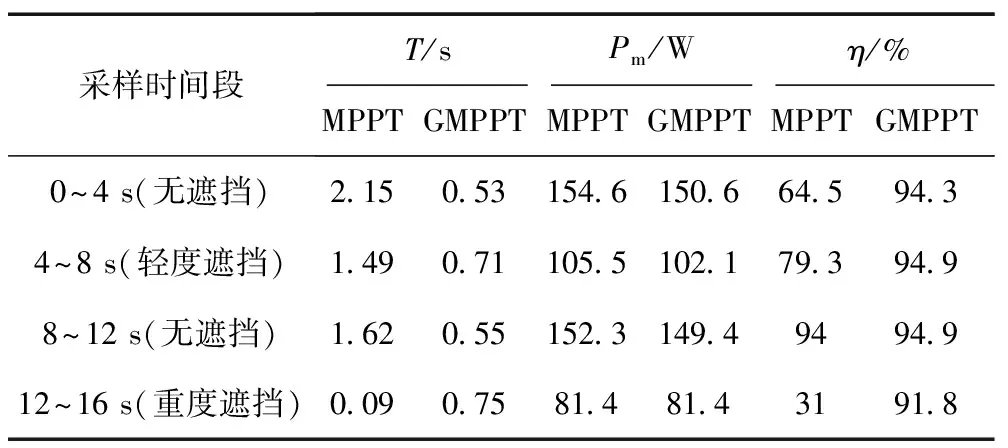
表1 MPPT和GMPPT極值點(diǎn)及效率
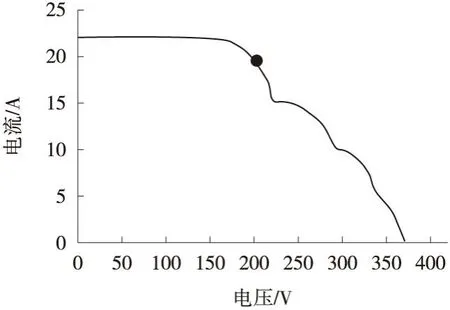
圖7 實(shí)測(cè)波形圖
優(yōu)化的GMPPT控制算法采用電壓環(huán)、電流環(huán)分頻控制策略,根據(jù)電池電壓的不同將光伏電能以不同的電壓輸出,保證光伏組件始終在最佳狀態(tài)工作,實(shí)現(xiàn)光伏發(fā)電系統(tǒng)高效工作。
2 光伏客車驅(qū)動(dòng)控制系統(tǒng)
光伏客車的驅(qū)動(dòng)能量主要由動(dòng)力電池組與光伏供能兩種方式組成,由驅(qū)動(dòng)控制系統(tǒng)實(shí)施切換。驅(qū)動(dòng)能方式的切換策略決定汽車動(dòng)力輸出的連續(xù)性、穩(wěn)定性、經(jīng)濟(jì)性。
2.1 光伏客車驅(qū)動(dòng)控制切換策略
目前,汽車動(dòng)力切換系統(tǒng)主要采用功率跟隨策略,系統(tǒng)的輸出功率增加至閾值時(shí),與另一個(gè)系統(tǒng)進(jìn)行切換。采用這種切換系統(tǒng)會(huì)使得供能系統(tǒng)頻繁切換,從而導(dǎo)致系統(tǒng)能量丟失,造成車輛能量損耗高,影響汽車的行駛里程;同時(shí)這種單閾值切換會(huì)造成系統(tǒng)切換的不連續(xù)性,使車輛在行駛途中易出現(xiàn)動(dòng)力階躍現(xiàn)象,降低汽車行駛的穩(wěn)定性。避免汽車動(dòng)力系統(tǒng)頻繁切換是目前混合動(dòng)力系統(tǒng)切換所要解決的主要問(wèn)題。
本文采用博弈方式的動(dòng)力系統(tǒng)切換策略。整車驅(qū)動(dòng)控制模塊通過(guò)信號(hào)接收獲知系統(tǒng)功率切換需求,采集系統(tǒng)狀態(tài)信息,對(duì)數(shù)據(jù)進(jìn)行預(yù)處理,完成動(dòng)力切換。驅(qū)動(dòng)系統(tǒng)控制切換示意圖如圖8所示。
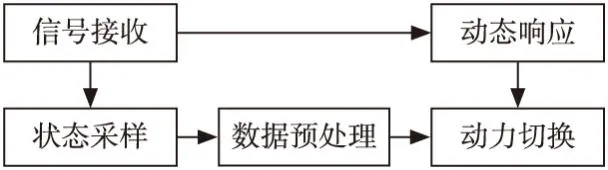
圖8 驅(qū)動(dòng)系統(tǒng)控制切換示意圖
驅(qū)動(dòng)控制切換策略:將車輛動(dòng)力系統(tǒng)切換需求指令作為系統(tǒng)切換的基礎(chǔ),將獲取到切換指令時(shí)刻的行駛參數(shù)作為博弈的前瞻條件,預(yù)測(cè)計(jì)算系統(tǒng)功率變化率和切出點(diǎn)功率;將系統(tǒng)功率變化率作為系統(tǒng)切換的導(dǎo)向,使切出系統(tǒng)的功率緩慢減少,切入系統(tǒng)的功率增加;當(dāng)切出系統(tǒng)的輸出功率接近切出點(diǎn)功率時(shí),系統(tǒng)功率切換完成。驅(qū)動(dòng)控制切換策略如圖9所示,圖中A、B系統(tǒng)可代表動(dòng)力電池組與光伏系統(tǒng),Po代表系統(tǒng)總功率,Px代表切換功率點(diǎn)值,ΔP表示功率變化率,Pa表示A系統(tǒng)功率,Pb表示B系統(tǒng)功率,Pup表示功率增加量,Pdown表示功率減少量,ΔPb表示A系統(tǒng)輸出功率停止減少后B系統(tǒng)輸出功率的增量,ΔPa表示B系統(tǒng)輸出功率停止減少后A系統(tǒng)輸出功率的增量。
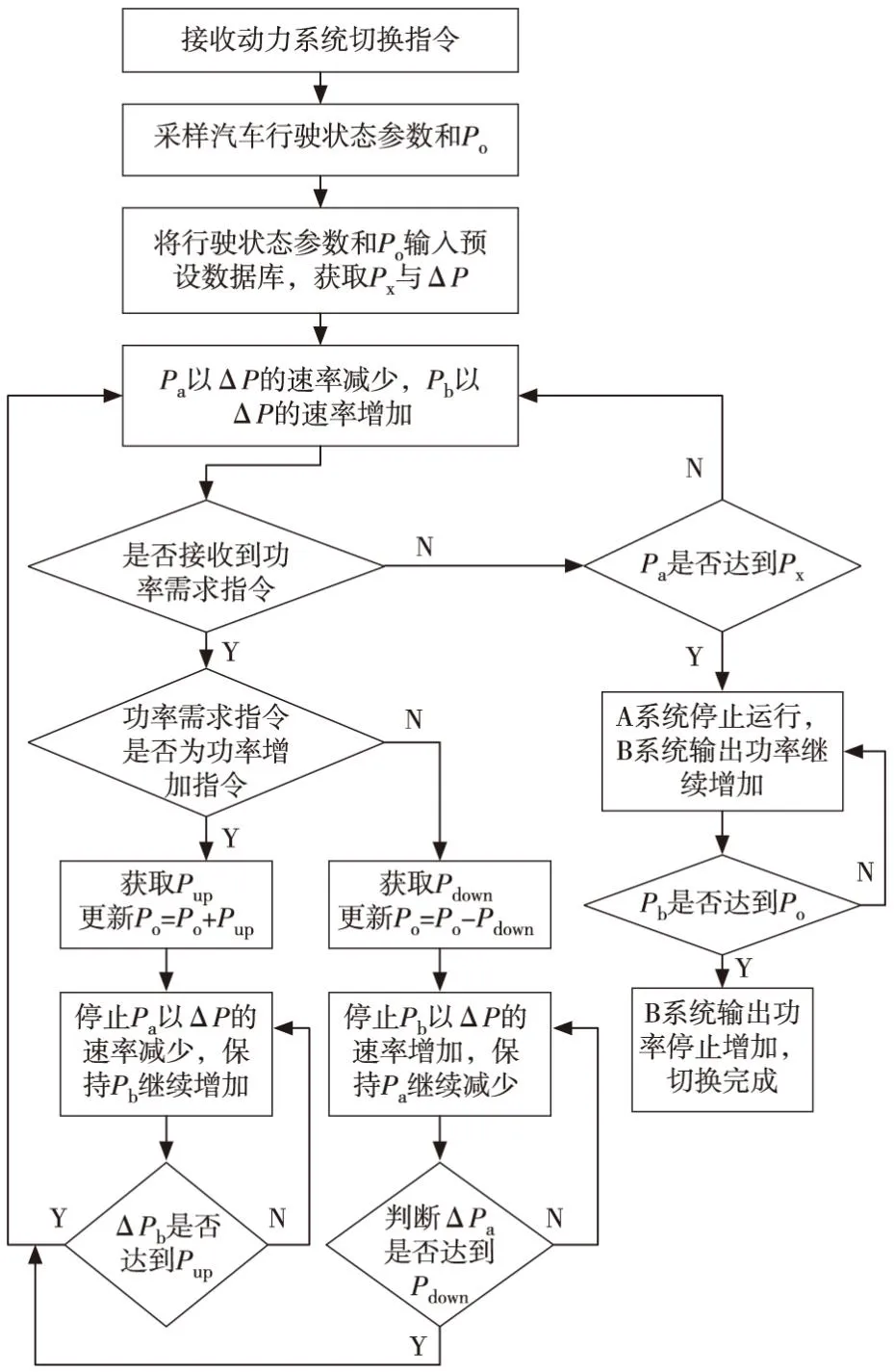
圖9 驅(qū)動(dòng)控制切換策略
2.2 光伏客車驅(qū)動(dòng)控制方案
本文主要采用光伏系統(tǒng)與動(dòng)力電池組雙能源動(dòng)力驅(qū)動(dòng)方式。采用濾波器對(duì)光伏轉(zhuǎn)換不平穩(wěn)信號(hào)進(jìn)行過(guò)濾;采用驅(qū)動(dòng)芯片實(shí)現(xiàn)光伏系統(tǒng)電壓、電流的逆變轉(zhuǎn)換;通過(guò)隔離DC/DC電源、DSP及整車控制信號(hào)需求等,實(shí)現(xiàn)雙能源動(dòng)力切換驅(qū)動(dòng)。圖10為光伏驅(qū)動(dòng)控制方案。
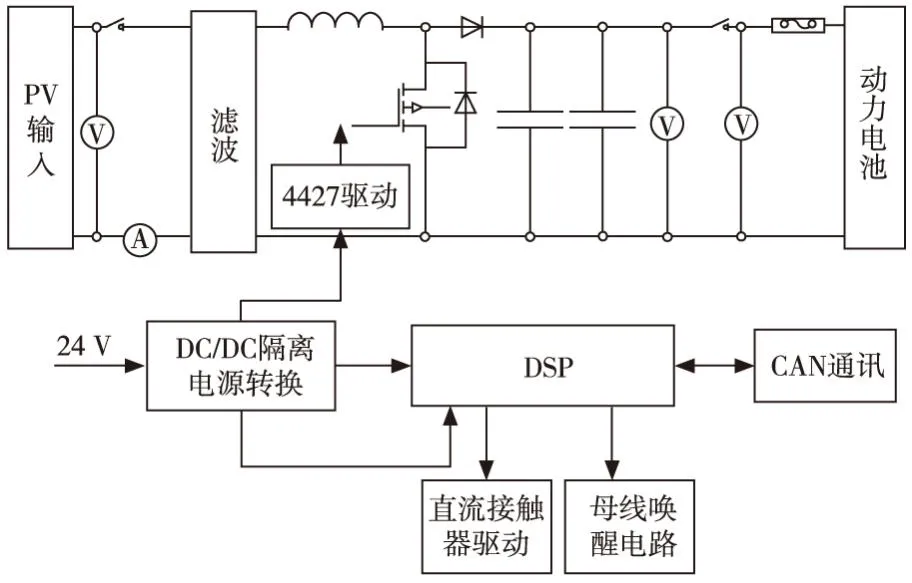
圖10 光伏驅(qū)動(dòng)控制方案
2.3 光伏客車驅(qū)動(dòng)控制運(yùn)行模式
車輛行駛時(shí)的主要?jiǎng)恿?lái)源于光伏系統(tǒng)與動(dòng)力電池組。本文采用混合動(dòng)力汽車控制模式,通過(guò)對(duì)光伏能源與動(dòng)力電池組電能的合理利用,可實(shí)現(xiàn)不同形式的供電方式,保證車輛高效、平順地運(yùn)行。目前,按車輛行駛需求及外在天氣、環(huán)境等因素,將客車光伏運(yùn)行模式分為4類:光伏儲(chǔ)能混動(dòng)模式、純電動(dòng)模式、光伏儲(chǔ)能模式、光伏運(yùn)行模式。光伏客車工作模式原理如圖11所示。
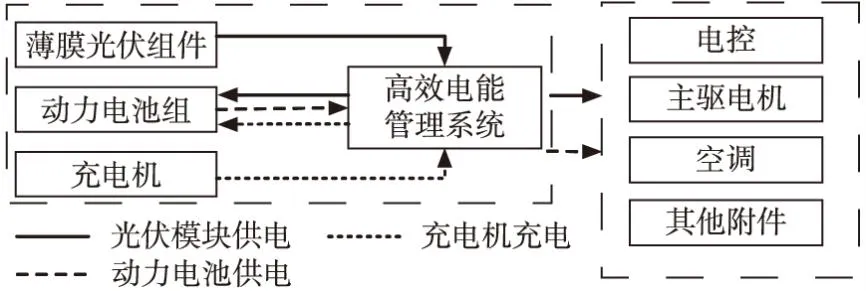
圖11 光伏客車工作模式原理
1) 光伏儲(chǔ)能混動(dòng)模式。光伏儲(chǔ)能混動(dòng)模式需要光伏系統(tǒng)與動(dòng)力電池組共同為負(fù)載提供動(dòng)力能源。根據(jù)行駛天氣、行駛環(huán)境決定光伏系統(tǒng)是否參與系統(tǒng)供能。當(dāng)有太陽(yáng)光照射時(shí),判斷光伏發(fā)電系統(tǒng)轉(zhuǎn)換的電能是否滿足當(dāng)前車輛行駛的全部需求,若經(jīng)過(guò)系統(tǒng)判斷,光伏系統(tǒng)轉(zhuǎn)換能源不足以提供車輛負(fù)載運(yùn)行,則其所發(fā)電能全部供給客車運(yùn)行,不足部分由動(dòng)力電池組實(shí)時(shí)補(bǔ)充,從而保證車輛運(yùn)行。光伏儲(chǔ)能混動(dòng)模式原理如圖12所示。
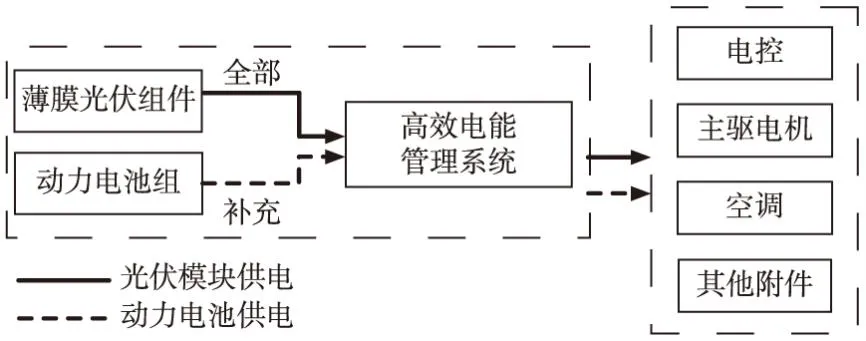
圖12 光伏儲(chǔ)能混動(dòng)模式原理
2) 純電動(dòng)模式。純電動(dòng)模式即單純采用車輛動(dòng)力電池能源為車輛負(fù)載供電。當(dāng)車輛行駛受到外界條件影響(如陰天、車輛夜間行駛、經(jīng)過(guò)長(zhǎng)隧道)時(shí),車輛光伏系統(tǒng)無(wú)法采集光束,光伏發(fā)電系統(tǒng)無(wú)法提供電能,此時(shí),光伏客車負(fù)載所需能量均由動(dòng)力電池組提供。純電動(dòng)模式原理如圖13所示。

圖13 純電動(dòng)模式原理
3) 光伏儲(chǔ)能模式。光伏系統(tǒng)將轉(zhuǎn)化的電能都用于系統(tǒng)儲(chǔ)能。判斷車輛的行駛狀態(tài),當(dāng)光伏客車處于停止?fàn)顟B(tài)時(shí),檢查儲(chǔ)能系統(tǒng)電池電量,若儲(chǔ)能系統(tǒng)電池電量低于滿電狀態(tài)(SOC<95%),判定儲(chǔ)能系統(tǒng)有充電需求,此時(shí)光伏發(fā)電系統(tǒng)所發(fā)電能全部用于儲(chǔ)能電池充電。光伏儲(chǔ)能模式原理如圖14所示。

圖14 光伏儲(chǔ)能模式原理
4) 光伏運(yùn)行模式。車輛負(fù)載所需的能量全部由光伏系統(tǒng)提供,這是一種短暫的臨界模式。由于車頂面積小,光伏發(fā)電系統(tǒng)轉(zhuǎn)化的電能通常無(wú)法完全滿足整車用電需求,當(dāng)光伏發(fā)電系統(tǒng)轉(zhuǎn)化的電能與光伏客車所耗電能匹配時(shí),整車無(wú)需儲(chǔ)能系統(tǒng)輸出電能,這種模式通常為臨界或過(guò)渡模式。光伏運(yùn)行模式原理如圖15所示。
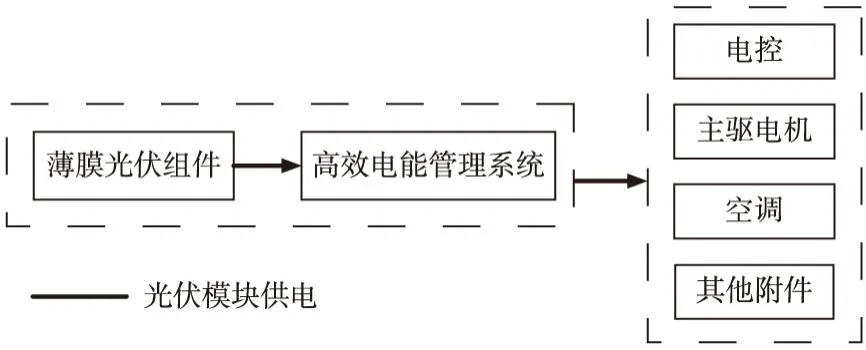
圖15 光伏運(yùn)行模式原理
2.4 高效電能管理系統(tǒng)
高效電能管理系統(tǒng)在整車動(dòng)力源與高壓動(dòng)力模塊之間起到關(guān)鍵作用,實(shí)現(xiàn)光伏系統(tǒng)與動(dòng)力電池的能量協(xié)調(diào)控制,提升各個(gè)工作模式及模式間切換的能量管理效率。
2.4.1 模式能量管理
傳統(tǒng)光伏系統(tǒng)與電池組系統(tǒng)工作組合的簡(jiǎn)單模式是直接通過(guò)并聯(lián)方式接入直流母線供能,其優(yōu)點(diǎn)是成本低;缺點(diǎn)是難以控制動(dòng)力電池組與光伏系統(tǒng)的功率分配,會(huì)使動(dòng)力電池頻繁地充放電,影響動(dòng)力電池壽命。相對(duì)復(fù)雜的模式是以動(dòng)力電池或者光伏系統(tǒng)為主控的半主動(dòng)結(jié)構(gòu),此結(jié)構(gòu)將主控單元與DC-DC轉(zhuǎn)換器串聯(lián),再與次控單元并聯(lián)接入直流母線。這種模式的優(yōu)點(diǎn)是可有效地控制主控單元的輸出;缺點(diǎn)是次控單元長(zhǎng)期處于工作狀態(tài),不能有效地控制其能量輸出。
例如,對(duì)于將動(dòng)力電池系統(tǒng)作為主控單元、光伏控制系統(tǒng)作為次控單元的半主動(dòng)結(jié)構(gòu),光伏供能系統(tǒng)將長(zhǎng)期處于工作狀態(tài),光伏電能會(huì)很快耗完,從而無(wú)法調(diào)節(jié)主控單元?jiǎng)恿﹄姵叵到y(tǒng)的能量輸出,進(jìn)而會(huì)出現(xiàn)動(dòng)力電池組大電流放電現(xiàn)象,最終導(dǎo)致電池衰退。相反,對(duì)于將光伏系統(tǒng)作為主控單元、動(dòng)力電池組作為次控單元的半主動(dòng)結(jié)構(gòu),當(dāng)車輛在啟動(dòng)、急加速等狀態(tài)功率急速需求時(shí),可通過(guò)控制光伏系統(tǒng)提供部分能量輔助動(dòng)力電池組工作,這既減少了動(dòng)力電池組系統(tǒng)大電流放電頻次,又延長(zhǎng)了動(dòng)力電池組壽命,同時(shí)也能增加光伏客車的續(xù)駛里程。雖然這種結(jié)構(gòu)可以延緩動(dòng)力電池組的衰退,但是動(dòng)力電池組直接并聯(lián)到直流母線處于常供電狀態(tài),不能控制其供電的輸出比例,難以實(shí)現(xiàn)對(duì)動(dòng)力電池與光伏能源的合理分配。
通過(guò)上述分析,本文設(shè)計(jì)主動(dòng)型的并聯(lián)結(jié)構(gòu),將動(dòng)力電池系統(tǒng)與光伏系統(tǒng)及DC-DC轉(zhuǎn)換器連接后再接入直流母線,實(shí)現(xiàn)了光伏系統(tǒng)與動(dòng)力電池組靈活組合,可根據(jù)系統(tǒng)功率需求,主動(dòng)、準(zhǔn)確地對(duì)光伏及動(dòng)力電池的能源進(jìn)行合理分配,具體設(shè)計(jì)了2.3節(jié)所述的4種工作模式。通過(guò)采用多種工作模式,實(shí)現(xiàn)了光伏發(fā)電與動(dòng)力電池系統(tǒng)的高效匹配,將兩種能源協(xié)調(diào)控制運(yùn)行,為客車增加了一定的續(xù)駛里程,相較于傳統(tǒng)的電能管理系統(tǒng)具有較大優(yōu)勢(shì)。
2.4.2 工作模式切換能量管理
傳統(tǒng)的系統(tǒng)動(dòng)力切換方式一般為:第一系統(tǒng)輸出功率抬升至一個(gè)定值與第二系統(tǒng)進(jìn)行切換,模式切換時(shí)隨著功率抬升“硬”切換,切換時(shí)間一般為3~5 ms。這種方式存在以下不足:在頻繁的模式切換中損失較多的能量,造成系統(tǒng)能量損失;切換過(guò)程不平滑,會(huì)造成汽車穩(wěn)定性下降;同時(shí)這種值對(duì)值的切換方式會(huì)使工作模式系統(tǒng)切換頻繁,造成混合系統(tǒng)混合深度較低。
本文采用的高效切換方式,模式間切換時(shí)間為2 ms,相較于傳統(tǒng)的電能管理系統(tǒng)具有模式切換穩(wěn)定、切換迅速的特點(diǎn),既能保證經(jīng)濟(jì)高效地利用系統(tǒng)能量,又能保證車輛模式間的平滑切換,實(shí)現(xiàn)車輛的高效平穩(wěn)運(yùn)行。
3 實(shí)車測(cè)試驗(yàn)證
3.1 道路測(cè)試
對(duì)搭載光伏發(fā)電系統(tǒng)的客車進(jìn)行道路驗(yàn)證。測(cè)試道路為市公共交通道路,主要包括市區(qū)、郊區(qū)大道、小道。道路測(cè)試在有樹蔭、隧道等場(chǎng)景下進(jìn)行,實(shí)現(xiàn)測(cè)試的全面性、均勻性,保證測(cè)試結(jié)果的公平性、準(zhǔn)確性。道路測(cè)試時(shí)間與車輛實(shí)際運(yùn)營(yíng)時(shí)間一致。圖16為光伏客車實(shí)際道路運(yùn)行圖。

圖16 光伏客車實(shí)際道路運(yùn)行
為驗(yàn)證不同季節(jié)條件下的光伏發(fā)電性能,文中選取較為典型的1月與6月數(shù)據(jù)進(jìn)行分析。如圖17所示,對(duì)1月與6月光伏系統(tǒng)發(fā)電量進(jìn)行實(shí)測(cè)統(tǒng)計(jì),1月實(shí)測(cè)日平均發(fā)電量約為11.43 kW·h,6月實(shí)測(cè)日平均發(fā)電量約為16.45 kW·h。并對(duì)全年光伏發(fā)電量進(jìn)行分析統(tǒng)計(jì),其日平均發(fā)電量約為13.87 kW·h。

圖17 冬季和夏季實(shí)際發(fā)電量對(duì)比
3.2 實(shí)驗(yàn)室測(cè)試
光伏客車能量消耗與續(xù)駛里程測(cè)試要求按照GB/T 18386—2017《電動(dòng)汽車 能量消耗率和續(xù)駛里程試驗(yàn)方法》[13]中的規(guī)定執(zhí)行。具體測(cè)試標(biāo)準(zhǔn)為:車輛行駛車速為40 km/h,行駛時(shí)間為10 h,每天行駛400 km,實(shí)驗(yàn)室室溫為20~30 ℃。光伏客車實(shí)驗(yàn)室測(cè)試場(chǎng)景如圖18所示。

圖18 光伏客車實(shí)驗(yàn)室測(cè)試場(chǎng)景
通過(guò)在實(shí)驗(yàn)室采用GB/T 18386—2017《電動(dòng)汽車 能量消耗率和續(xù)駛里程試驗(yàn)方法》對(duì)車輛的續(xù)駛里程及能量消耗測(cè)試可知:當(dāng)需要提供相同的電量時(shí),鋰電池組與薄膜光伏在成本、質(zhì)量及日耗電量的對(duì)比見表2。表明采用薄膜光伏的成本更低、重量更輕,相較于車輛動(dòng)力電池組來(lái)說(shuō),具有較大優(yōu)勢(shì)。
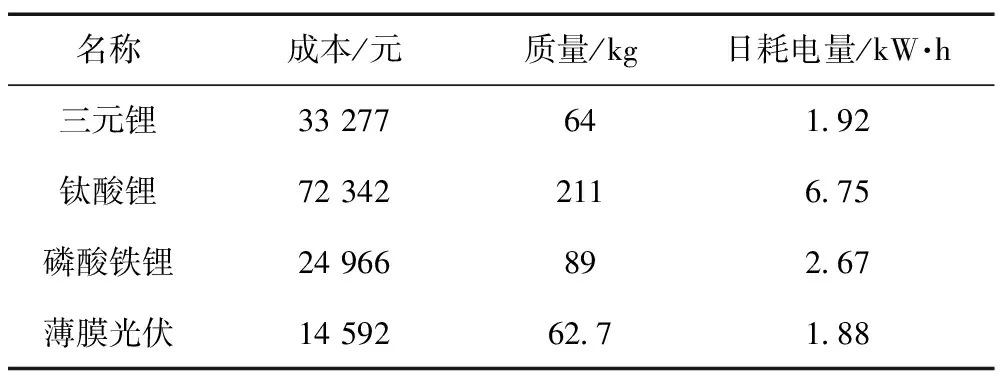
表2 光伏成本與增程效果
但搭載薄膜光伏發(fā)電系統(tǒng),其自身也會(huì)產(chǎn)生一定的耗電量,去除光伏系統(tǒng)自身耗能,用于客車負(fù)載供能的日平均發(fā)電量約為15.78 kW·h,可增加光伏客車日續(xù)駛里程10 km以上。光伏系統(tǒng)發(fā)電量如圖19所示。

圖19 光伏系統(tǒng)發(fā)電量
客車采用的薄膜光伏組件具有美觀輕便、可彎曲、易安裝、高可靠性、長(zhǎng)壽命等優(yōu)點(diǎn),既能實(shí)現(xiàn)整車輕量化,又能增加行駛里程。
4 結(jié)束語(yǔ)
本文提出一種高效電能管理的客車光伏技術(shù),采用車載光伏優(yōu)化的全局最大功率點(diǎn)跟蹤自適應(yīng)掃描方法,通過(guò)電壓環(huán)、電流環(huán)分頻控制,程序時(shí)間由原來(lái)的5 μs大幅縮減到0.5 μs。采用優(yōu)化后的GMPPT算法在重度遮擋的情況下,效率由31%提高到了91.8%,大大提高了移動(dòng)陰影遮擋下的功率追蹤速度,解決了嚴(yán)重遮擋時(shí)無(wú)法追蹤全局最大功率點(diǎn)的問(wèn)題。同時(shí)設(shè)計(jì)了多模式動(dòng)力供能,搭配高效電能管理系統(tǒng),實(shí)現(xiàn)了光伏系統(tǒng)與動(dòng)力電池的能量協(xié)調(diào)控制,提升了各個(gè)工作模式及模式之間切換時(shí)的能量管理效率,實(shí)現(xiàn)了車輛高效平穩(wěn)運(yùn)行。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
奧秘(創(chuàng)新大賽)(2020年1期)2020-05-22 02:42:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小學(xué)科學(xué)(學(xué)生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學(xué))(2019年12期)2019-06-15 10:56:32
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
通信電源技術(shù)(2018年3期)2018-06-26 06:34:18
人大建設(shè)(2018年2期)2018-04-18 12:17:00