串聯(lián)式混合動(dòng)力汽車發(fā)電機(jī)恒壓發(fā)電性能試驗(yàn)研究
2024-03-05 06:42:28倪大成
客車技術(shù)與研究 2024年1期
關(guān)鍵詞:發(fā)電機(jī)
李 軍, 倪大成, 姚 超, 黃 慶, 龔 軍
(湖南力行動(dòng)力科技有限公司, 湖南 株洲 412007)
因串聯(lián)式混合動(dòng)力系統(tǒng)的結(jié)構(gòu)簡(jiǎn)單、布置靈活而廣泛應(yīng)用于新能源汽車[1-2]。串聯(lián)式混合動(dòng)力系統(tǒng)由發(fā)動(dòng)機(jī)單元及動(dòng)力電池組成,發(fā)動(dòng)機(jī)單元是主要?jiǎng)恿υ?動(dòng)力電池起儲(chǔ)能、功率平衡及穩(wěn)住高壓母線電壓的作用[3]。發(fā)動(dòng)機(jī)單元由發(fā)動(dòng)機(jī)和發(fā)電機(jī)構(gòu)成,發(fā)電機(jī)為動(dòng)力系統(tǒng)提供高壓直流電。
如果串聯(lián)式混合動(dòng)力汽車中的動(dòng)力電池出現(xiàn)故障導(dǎo)致整車拋錨無(wú)法挪車,則需要發(fā)動(dòng)機(jī)單元起到動(dòng)力電池的作用。為此,對(duì)串聯(lián)式混合動(dòng)力汽車發(fā)電機(jī)恒壓控制技術(shù)進(jìn)行了許多研究[4-8],但未開展性能試驗(yàn)的研究。為早日實(shí)現(xiàn)串聯(lián)式混合動(dòng)力汽車發(fā)電機(jī)恒壓發(fā)電技術(shù)的裝車應(yīng)用,本文對(duì)發(fā)電機(jī)恒壓發(fā)電試驗(yàn)方案進(jìn)行研究,提出一種新型負(fù)載試驗(yàn)方案,并進(jìn)行性能試驗(yàn)驗(yàn)證。
1 試驗(yàn)方案
性能試驗(yàn)主要測(cè)試發(fā)電系統(tǒng)輸出電壓的波動(dòng)情況,試驗(yàn)系統(tǒng)包含高壓電源、測(cè)功機(jī)、發(fā)電系統(tǒng)、檢測(cè)設(shè)備及負(fù)載等。圖1為性能試驗(yàn)原理框圖。

圖1 性能試驗(yàn)原理框圖
發(fā)電系統(tǒng)恒壓發(fā)電性能測(cè)試項(xiàng)目有:①穩(wěn)態(tài)功率下電壓調(diào)整率SV;②穩(wěn)態(tài)功率下負(fù)載調(diào)整率SL;③動(dòng)態(tài)功率下負(fù)載調(diào)整率SD。
1) 穩(wěn)態(tài)功率下的電壓調(diào)整率是指發(fā)電系統(tǒng)工作在額定轉(zhuǎn)速下,在工作電壓范圍內(nèi)輸出電壓的最大變化率,用百分?jǐn)?shù)表示。穩(wěn)態(tài)功率下電壓調(diào)整率SV按式(1)計(jì)算:
SV=|U-U0|/U0×100%
(1)
式中:U0為發(fā)電系統(tǒng)輸出電壓給定值,一般選取3個(gè),分別設(shè)置為發(fā)電系統(tǒng)工作電壓的典型值、最大值及最小值;U表示發(fā)電系統(tǒng)輸出電壓的最大值或最小值,選取相對(duì)U0差值較大的值(若|Umax-U|>|Umin-U|,計(jì)算電壓調(diào)整率時(shí),U選Umax,反之U則選Umin)。
2) 穩(wěn)態(tài)功率下的負(fù)載調(diào)整率是指發(fā)電系統(tǒng)工作在額定電壓下,功率負(fù)載不變時(shí)輸出電壓的最大變化率,用百分?jǐn)?shù)表示。穩(wěn)態(tài)功率下負(fù)載調(diào)整率SL按式(2)計(jì)算:
SL=|U-U0|/U0×100%
(2)
功率負(fù)載不變工況時(shí),負(fù)載大小一般選取3個(gè),分別設(shè)置為輕載、半載及滿載。
3) 動(dòng)態(tài)功率下的負(fù)載調(diào)整率是指發(fā)電系統(tǒng)工作在額定電壓下,功率負(fù)載突變時(shí)輸出電壓的最大變化率,用百分?jǐn)?shù)表示。動(dòng)態(tài)功率下負(fù)載調(diào)整率SD按式(3)計(jì)算:
SD=|U-U0|/U0×100%
(3)
功率負(fù)載突變工況時(shí),負(fù)載大小分別設(shè)置為從零到滿載的突變及從滿載到零的突變。
4) 電壓調(diào)整率及負(fù)載調(diào)整率性能指標(biāo)參考GJB 235A—97《軍用交流移動(dòng)電站通用規(guī)范》[9],對(duì)于250 kW及以上功率等級(jí)的發(fā)電系統(tǒng),穩(wěn)態(tài)功率下電壓調(diào)整率SV≤2.5%,穩(wěn)態(tài)功率下負(fù)載調(diào)整率SL≤2.5%,動(dòng)態(tài)功率下負(fù)載調(diào)整率SD≤5%。
2 傳統(tǒng)負(fù)載試驗(yàn)方案
傳統(tǒng)負(fù)載方案采用電阻箱來(lái)模擬圖1中的整車驅(qū)動(dòng)電機(jī)負(fù)載,所需試驗(yàn)設(shè)備較少,試驗(yàn)原理簡(jiǎn)單。試驗(yàn)中通過調(diào)節(jié)電阻箱中的電阻配置及通斷投切開關(guān)來(lái)調(diào)節(jié)負(fù)載大小,因此負(fù)載大小不能連續(xù)變化,其負(fù)載調(diào)節(jié)表現(xiàn)為有級(jí)調(diào)節(jié),調(diào)節(jié)范圍有限,圖2為電阻負(fù)載配置及投切示意圖。

圖2 電阻負(fù)載配置及投切示意圖
在電阻負(fù)載的基礎(chǔ)上,文獻(xiàn)[10]將電阻負(fù)載改為負(fù)載系統(tǒng)。負(fù)載系統(tǒng)包括負(fù)載控制柜、電阻箱、電抗器等部分。負(fù)載控制由負(fù)載控制柜實(shí)現(xiàn),包括阻性負(fù)載和感性負(fù)載的控制,結(jié)合模糊控制和對(duì)分插值逼近算法,實(shí)現(xiàn)了有功功率的無(wú)級(jí)調(diào)節(jié),同時(shí)通過對(duì)電感負(fù)載的調(diào)節(jié),實(shí)現(xiàn)了無(wú)功功率的無(wú)級(jí)調(diào)節(jié)。此方案與電阻負(fù)載方案相比,解決了負(fù)載大小不能連續(xù)調(diào)節(jié)的問題,但其本質(zhì)是采用電阻和電感的組合來(lái)模擬后端用電負(fù)載,這種電阻和電感組合的形式與實(shí)際的整車驅(qū)動(dòng)電機(jī)負(fù)載差異較大,無(wú)法準(zhǔn)確地反映出現(xiàn)實(shí)工況[11],且試驗(yàn)過程中通過電阻吸收發(fā)電機(jī)產(chǎn)生的電功率,將電能以熱能的形式消耗掉,不具備能量回饋功能,試驗(yàn)過程能耗較大。
3 新型負(fù)載試驗(yàn)方案
為精準(zhǔn)模擬圖1中的整車驅(qū)動(dòng)電機(jī)負(fù)載,本文采用新型負(fù)載方案來(lái)開展恒壓發(fā)電性能試驗(yàn)。新型負(fù)載方案采用真實(shí)電機(jī)負(fù)載來(lái)模擬實(shí)際整車驅(qū)動(dòng)電機(jī)負(fù)載。真實(shí)電機(jī)負(fù)載方案中包含兩套驅(qū)動(dòng)系統(tǒng)、一個(gè)對(duì)拖臺(tái)及一個(gè)電源柜,所需試驗(yàn)設(shè)備較多,試驗(yàn)原理復(fù)雜。其中兩套驅(qū)動(dòng)系統(tǒng)采用的電機(jī)規(guī)格與被試發(fā)電機(jī)相同,所以負(fù)載投切能力與被試發(fā)電系統(tǒng)性能完全保持一致。通過驅(qū)動(dòng)系統(tǒng)的上位機(jī)控制軟件進(jìn)行轉(zhuǎn)矩輸出,可實(shí)現(xiàn)負(fù)載連續(xù)調(diào)節(jié)的功能。
由于負(fù)載形式與整車驅(qū)動(dòng)系統(tǒng)一樣,所以可精準(zhǔn)模擬整車驅(qū)動(dòng)工況。同時(shí),該方案具備能量回饋功能,試驗(yàn)過程綠色節(jié)能。該方案中永磁同步電機(jī)主要性能指標(biāo)參數(shù)如下:額定功率為300 kW,峰值功率為350 kW;額定轉(zhuǎn)速為1 600 r/min,峰值轉(zhuǎn)速為2 300 r/min;額定轉(zhuǎn)矩為1 789 N·m,峰值轉(zhuǎn)矩為2 088 N·m。
圖3為電機(jī)負(fù)載試驗(yàn)原理框圖。閉合接觸器K1,高壓直流電源1給測(cè)功機(jī)提供高壓直流電,測(cè)功機(jī)通過變速器拖動(dòng)被試電機(jī)M3,被試控制器U3經(jīng)過不可控整流輸出高壓直流電,被試電機(jī)M3被反拖到給定轉(zhuǎn)速,L3母線上高壓直流電壓達(dá)到被試控制器工作電壓,給被試控制器使能并下發(fā)恒壓發(fā)電模式指令,此時(shí)L3母線電壓穩(wěn)定在給定直流電壓。

圖3 電機(jī)負(fù)載試驗(yàn)原理框圖
閉合接觸器K3,高壓直流電源2給陪試控制器U1提供高壓直流電,陪試控制器U1控制陪試電機(jī)M1工作于饋電模式、轉(zhuǎn)速環(huán)狀態(tài),轉(zhuǎn)速設(shè)置為陪試電機(jī)額定轉(zhuǎn)速,陪試電機(jī)M1通過對(duì)拖臺(tái)將陪試電機(jī)M2拖動(dòng)至額定轉(zhuǎn)速。閉合接觸器K2,陪試控制器U2控制陪試電機(jī)M2工作于電動(dòng)模式、轉(zhuǎn)矩環(huán)狀態(tài)。
通過調(diào)節(jié)陪試控制器U2的轉(zhuǎn)矩給定值,控制陪試電機(jī)M2的電動(dòng)功率,來(lái)實(shí)現(xiàn)被試發(fā)電機(jī)系統(tǒng)恒壓發(fā)電負(fù)載的調(diào)節(jié)功能,調(diào)節(jié)過程中用功率分析儀監(jiān)控L3直流母線電壓,用來(lái)計(jì)算電壓調(diào)整率及負(fù)載調(diào)整率。
4 試驗(yàn)結(jié)果
4.1 穩(wěn)態(tài)功率下電壓調(diào)整率試驗(yàn)
被試電機(jī)M3及陪試電機(jī)M1工作在額定轉(zhuǎn)速1 600 r/min,陪試發(fā)電機(jī)控制器U2通過上位機(jī)給定轉(zhuǎn)矩895 N·m,模擬驅(qū)動(dòng)電機(jī)穩(wěn)態(tài)負(fù)載150 kW。被試發(fā)電機(jī)控制器U3輸出的給定直流電壓分別設(shè)置為:典型值600 V、最大值700 V、最小值500 V,穩(wěn)態(tài)工作下電壓輸出波形如圖4、圖5、圖6所示。

圖4 600 V電壓平臺(tái)下電壓輸出波形

圖5 700 V電壓平臺(tái)下電壓輸出波形

圖6 500 V電壓平臺(tái)下電壓輸出波形
各電壓平臺(tái)下穩(wěn)態(tài)功率工作時(shí),通過分析波形數(shù)據(jù),并按式(1)計(jì)算電壓調(diào)整率SV,結(jié)果見表1。

表1 穩(wěn)態(tài)功率下電壓調(diào)整率
4.2 穩(wěn)態(tài)功率下負(fù)載調(diào)整率試驗(yàn)
被試電機(jī)M3及陪試電機(jī)M1工作在額定轉(zhuǎn)速1 600 r/min,被試發(fā)電機(jī)控制器U3輸出的給定直流電壓設(shè)置為600 V,陪試發(fā)電機(jī)控制器U2通過上位機(jī)分別給定轉(zhuǎn)矩1 789 N·m、895 N·m、179 N·m,模擬穩(wěn)態(tài)負(fù)載分別對(duì)應(yīng)300 kW、150 kW、30 kW,穩(wěn)態(tài)工作下電壓輸出波形如圖7、圖8、圖9所示。
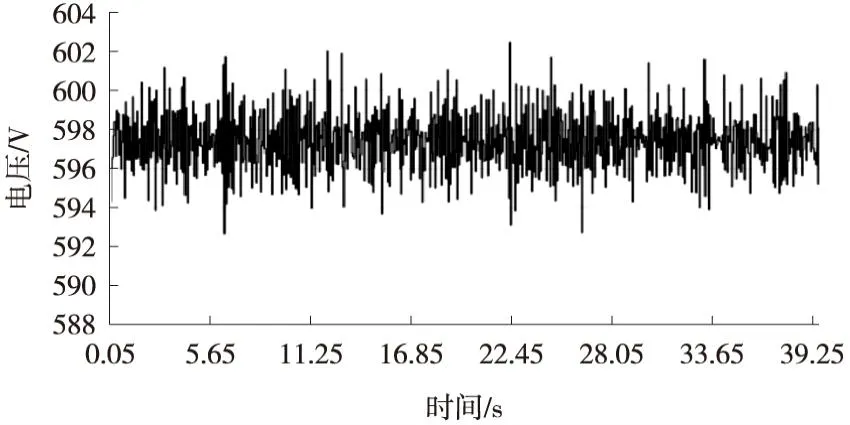
圖7 300 kW功率下電壓輸出波形
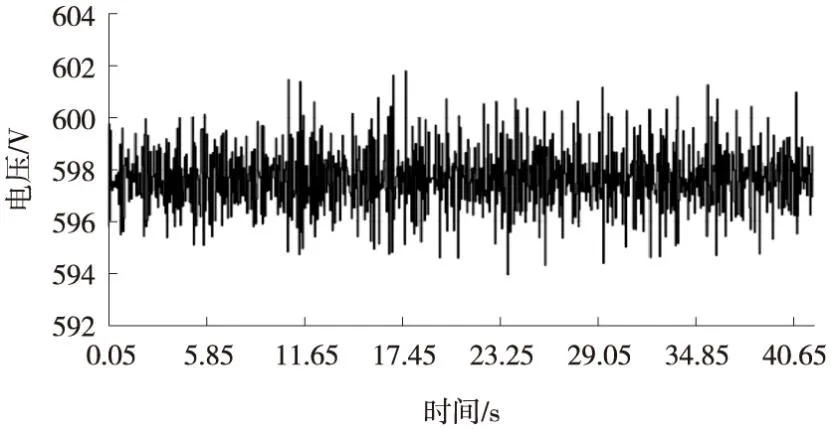
圖8 150 kW功率下電壓輸出波形

圖9 30 kW功率下電壓輸出波形
各功率等級(jí)下穩(wěn)態(tài)功率工作時(shí),通過分析波形數(shù)據(jù),并按式(2)計(jì)算負(fù)載調(diào)整率SL,結(jié)果見表2。

表2 穩(wěn)態(tài)功率下負(fù)載調(diào)整率
4.3 動(dòng)態(tài)功率下負(fù)載調(diào)整率試驗(yàn)
被試電機(jī)M3及陪試發(fā)電機(jī)M1工作在額定轉(zhuǎn)速1 600 r/min,被試發(fā)電機(jī)控制器U3輸出的給定直流電壓設(shè)置為600 V,陪試發(fā)電機(jī)控制器U2通過上位機(jī)給定轉(zhuǎn)矩分別從0突變到額定轉(zhuǎn)矩1 789 N·m,從額定轉(zhuǎn)矩1 789 N·m突變到0,并模擬驅(qū)動(dòng)電機(jī)動(dòng)態(tài)功率負(fù)載從0突變到300 kW及從300 kW突變到0的各種工況,動(dòng)態(tài)功率負(fù)載下電壓輸出波形如圖10和圖11所示。

圖10 負(fù)載從0突變到300 kW時(shí)電壓輸出波形
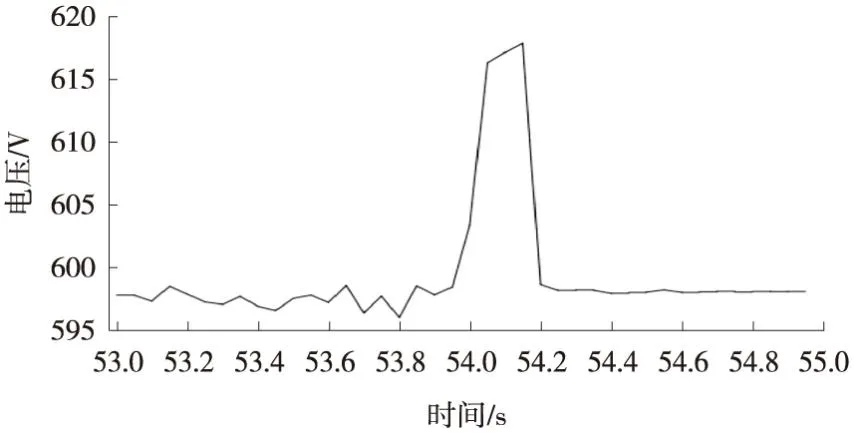
圖11 負(fù)載從300 kW突變到0時(shí)電壓輸出波形
功率負(fù)載突變時(shí),通過分析波形數(shù)據(jù),并按式(3)計(jì)算負(fù)載調(diào)整率SD,結(jié)果見表3。
由以上試驗(yàn)數(shù)據(jù)可知,發(fā)電機(jī)在恒壓發(fā)電模式下,驅(qū)動(dòng)電機(jī)穩(wěn)態(tài)功率負(fù)載時(shí)電壓調(diào)整率和負(fù)載調(diào)整率精度均很高,調(diào)節(jié)精度在1%左右;當(dāng)功率負(fù)載突變時(shí),由于功率變化大,能量的突增突減導(dǎo)致母線電壓瞬間波動(dòng)稍大,調(diào)節(jié)精度略差,最大值達(dá)到3%,而后輸出電壓恢復(fù)穩(wěn)定輸出,調(diào)節(jié)精度滿足性能指標(biāo)要求。
5 結(jié)束語(yǔ)
本文介紹了發(fā)電系統(tǒng)恒壓發(fā)電的性能指標(biāo)及試驗(yàn)原理,在研究發(fā)電機(jī)組傳統(tǒng)負(fù)載試驗(yàn)方案的基礎(chǔ)上,提出了一種電機(jī)負(fù)載實(shí)物試驗(yàn)方案,進(jìn)行了發(fā)電系統(tǒng)恒壓發(fā)電性能試驗(yàn),并分析了試驗(yàn)數(shù)據(jù)。試驗(yàn)結(jié)果表明,電機(jī)負(fù)載試驗(yàn)方案切實(shí)可行,且發(fā)電系統(tǒng)在不同電壓平臺(tái)、穩(wěn)態(tài)負(fù)載及動(dòng)態(tài)負(fù)載下,實(shí)際電壓調(diào)整率和負(fù)載調(diào)整率均滿足性能指標(biāo)要求,為后續(xù)動(dòng)力單元聯(lián)合調(diào)試及實(shí)際裝車應(yīng)用提供了重要依據(jù)。
猜你喜歡
故事作文·高年級(jí)(2021年12期)2021-12-21 02:32:35
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測(cè)與儀表(2015年13期)2015-04-09 11:57:12
電測(cè)與儀表(2015年2期)2015-04-09 11:29:14
水電站機(jī)電技術(shù)(2014年6期)2014-09-26 12:07:48
水電站機(jī)電技術(shù)(2014年1期)2014-09-26 11:59:45