新型電力系統慣量特性及其實時感知技術
2024-03-07 08:19:50馬駿超陸承宇王晨旭馮啟帆夏楊紅
浙江電力 2024年2期
馬駿超,陸承宇,王晨旭,馮啟帆,夏楊紅,彭 琰
(1.國網浙江省電力有限公司電力科學研究院,杭州 310014;2.浙江大學 電氣工程學院,杭州 310027)
0 引言
在實現2030年前碳達峰、2060年前碳中和的“雙碳”目標的背景下,電網接入新能源電源的比例迅速上升[1-2],導致電力系統轉動慣量迅速下降,如果不采取有效的頻率控制策略,將對系統頻率穩定性造成巨大影響[3-7]。頻率問題在受端電網中表現尤為突出,2015年某饋入華東電網的特高壓直流系統曾發生雙極閉鎖,瞬時損失功率5 400 MW,導致系統頻率最低跌至49.56 Hz,是近10年來首次跌破49.8 Hz,頻率越限時間長達數百秒,給新形勢下的大電網頻率安全問題敲響了警鐘。同時相較于常規電源,新能源電源接入點與自然資源密切相關,存在電源接入點分散、單接入點容量較低的特點,對新型電力系統中各電源的控制策略提出了新的要求[8-9]。隨著電網“雙高”特性的進一步凸顯,新型電力系統低轉動慣量穩定特性和分布式電源集群主動慣性支撐技術是一個需要深入研究的課題。
電網慣量作為決定電網頻率動態行為的關鍵因素,對研究電網的穩定性問題至關重要。在估計系統慣量方面,傳統的慣量估計方法大多是基于測量擾動后的頻率和功率變化,通過搖擺方程計算轉動慣量。文獻[10]采用滑動數據窗口來實現連續計算慣量估計值。文獻[11]采用擴展卡爾曼濾波技術和軌跡靈敏度分析,對向量單元記錄的擾動數據進行模型參數識別。文獻[12]則通過環境測量,采用數據驅動的方法計算系統中轉動慣量的數值,避免了對系統進行大擾動,但是該方法需要正確地建立系統的狀態空間方程。
隨著大量新能源發電單元通過電力電子設備滲入電網,替代傳統同步發電機向電網輸出功率,導致電網的元件組成復雜多變,虛擬慣量控制、下垂控制、虛擬同步發電機的引入等使得慣量不確定因素不斷增加[13-14]。慣量作為決定電網受擾后頻率動態行為的重要特征參數,在新能源電力系統中的表現形式復雜多樣,其中跟網型逆變器的慣量與發電機轉子提供的慣量具有顯著的物理差異,其本質仍是功率源[15]。由于穩定性的限制,構網型逆變器提供的轉動慣量H非常有限,更多地提供了阻尼D[16],因此在新型電力系統中僅采用轉動慣量來表示系統中的慣量水平難以準確反映擾動下的頻率特性,需要厘清不同慣量的響應過程,研究新型電力系統的慣量特性并提出慣量的實時感知技術。
此外,在含有虛擬慣性控制的新能源占比較高的電網中,由于電力電子調頻裝置動作速度較快,大規模新能源的消納使得電網的頻率特性更加復雜。僅采用發電機轉子的轉動慣量和一次調頻來表示系統的頻率響應模型難以有效擬合實際的頻率變化情況[17-18],需要在明確不同機組的慣量響應過程、實時感知慣量的基礎上,建立適合于新型電力系統的等值慣量模型。
本文首先介紹傳統同步發電機的慣量特性,在此基礎上研究新能源機組的慣量響應過程并建立相應的數學模型,厘清不同慣量的基本概念。然后結合機組在地理空間上的分布特性,合理劃分區域,提出采用改進多項式曲線擬合法和系統辨識法測量系統中慣量的具體數值。最后通過IEEE 9 節點系統模型仿真分析新能源機組提供的虛擬慣量對系統頻率的影響,并對系統的慣量水平進行定量評估。
1 新型電力系統虛擬慣量及其數學模型
新能源機組包含光伏、風電、儲能、制氫等多種異構式分布電源,其動態特性完全不同于同步發電機,傳統搖擺方程難以全面刻畫新型電力系統頻率受擾后的動態過程,因此對含有大量新能源機組的新型電力系統的慣量特性進行研究。為了厘清不同設備在頻率擾動下的響應過程,需要對同步發電機和新能源機組、負荷的慣量響應過程建立相應的數學模型。
1.1 同步發電機慣量響應過程及數學模型
首先簡要介紹同步發電機的慣量響應過程。在僅有發電機作為電源的傳統電力系統中,電力系統的慣性描述了表示系統機電特性的搖擺方程:

同步發電機及調速器的模型可以用負載功率變化與頻率偏差的傳遞函數表示,如圖1所示并表示為式(2)中的傳遞函數G,其中:s為拉普拉斯算子;TG為調速器系數;FHP為渦輪HP系數;TRH為再熱器時間常數;TCH為主入口容積時間常數;ΔPD-pu為阻尼環節吸收的功率;Δfr-pu為系統頻率與額定頻率之差;1/R發電機調速器的調差系數。
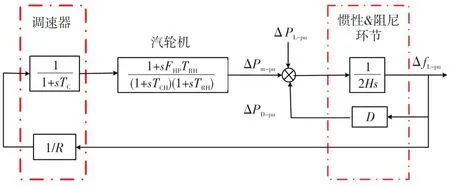
圖1 同步發電機及其調速器數學模型Fig.1 Mathematic model of synchronous generator and governor
不同慣量的同步發電機頻率響應如圖2所示。隨著發電機慣性的增加,系統受到擾動后的RoCoF(頻率變化率)降低,頻率最低點抬升。由于發電機組的調速器及自動調頻裝置調節汽輪機汽門或水輪機導向葉片開度需要一定的時間,一次調頻和二次調頻動作較慢,響應初期只有慣性作用,慣性越大則將為一次調頻爭取越多時間,從而防止低頻減載的誤動,有利于系統的頻率穩定。
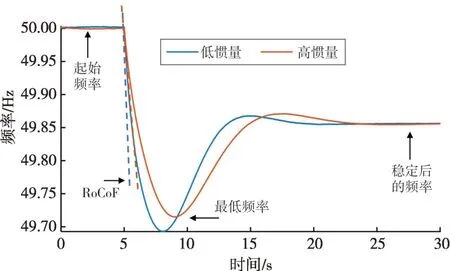
圖2 不同慣量的同步發電機頻率響應Fig.2 Frequency responses of a synchronous generator at different rotational inertias
1.2 新能源機組慣量響應過程及數學模型
可再生能源發電單元與傳統的集中式發電機組有明顯差異,主要體現為以下3個方面[13,18]:
1)新能源發電單元通常缺少常規發電單元中可用來抵消頻率變化的能量緩沖環節,其中不涉及旋轉部件且電容器中存儲的能量非常少,可近似認為其慣量為零。
2)可再生能源發電單元通常通過電力電子換流裝置連接,該電力電子變換器將發電機與電網完全或部分分離,阻隔了發電機轉速與系統頻率之間的聯系,導致換流器連接的新能源發電單元無法直接對整個系統的慣量做出貢獻。
3)新能源發電單元采用的調頻裝置動作較快,在時間尺度上與發電機轉子的慣性響應更為接近,虛擬慣性對電網頻率的支撐使得頻率變化更為復雜。
因此,亟需研究全方位評估電網慣量特征的方法體系,對新能源電力系統的慣量動態特征進行分析。
1.2.1 同步慣量與非同步慣量
新型電力系統中存在的慣量按照頻率與能量的關系可以分為同步慣量和非同步慣量,如圖3所示,其中:ωr為同步發電機的角頻率;PVIC為與頻率調節相關的控制環節產生的功率變化指令;PPRC為系統的基準功率;Pref為系統加入非同步慣量后的功率參考值。
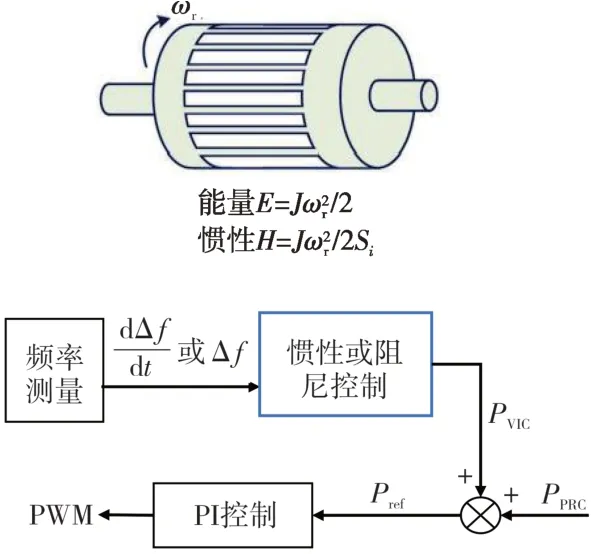
圖3 同步慣量和非同步慣量Fig.3 The synchronous inertia and asynchronous inertia
同步發電機轉子固有的物理特性就是通過釋放轉子中儲存的能量來響應負載的變化,頻率的變化是轉子動能釋放的結果,因此這種基于搖擺方程的慣量稱為同步慣量。非同步慣量的頻率調節特點是根據并網點頻率的變化來調節發出的有功功率,主要由系統中存在的各種具有頻率調節能力的電源提供,如新能源發電、儲能系統以及同步發電機的調速器(包括一次調頻和二次調頻)等。由于測量與控制的延遲,存在一定的滯后,即頻率已經下降了,控制策略才開始起作用[13-14]。兩種慣量的對比如表1所示。
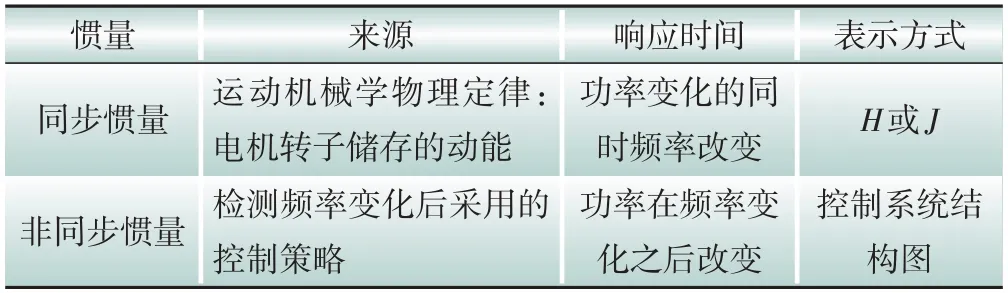
表1 同步慣量與非同步慣量對比Table 1 Comparison of the synchronous inertia and asynchronous inertia
盡管系統中非同步慣量的控制策略不同,但可以系統地表示和區分發電機調速器以及不同新能源機組具有的等效虛擬慣量的作用。虛擬慣量根據拓撲的不同可分為基于RoCoF 的虛擬慣量(或稱作虛擬轉動慣量)、基于頻率偏差或功率-頻率下垂特性的虛擬慣量(或稱作虛擬阻尼)、基于頻率積分的虛擬慣量。系統的同步慣量與非同步慣量整體模型如圖4所示,其中:?f為系統的頻率與額定頻率之差;?P為系統中電源和負荷的功率變化,下標sync 和non-sync 分別代表同步慣量和非同步慣量,下標gov表示發電機調速器,下標VI表示系統中的虛擬慣量;HVI、DVI、KVI為不同虛擬慣量的增益;延時和慣性環節代表控制器的響應滯后于頻率變化。
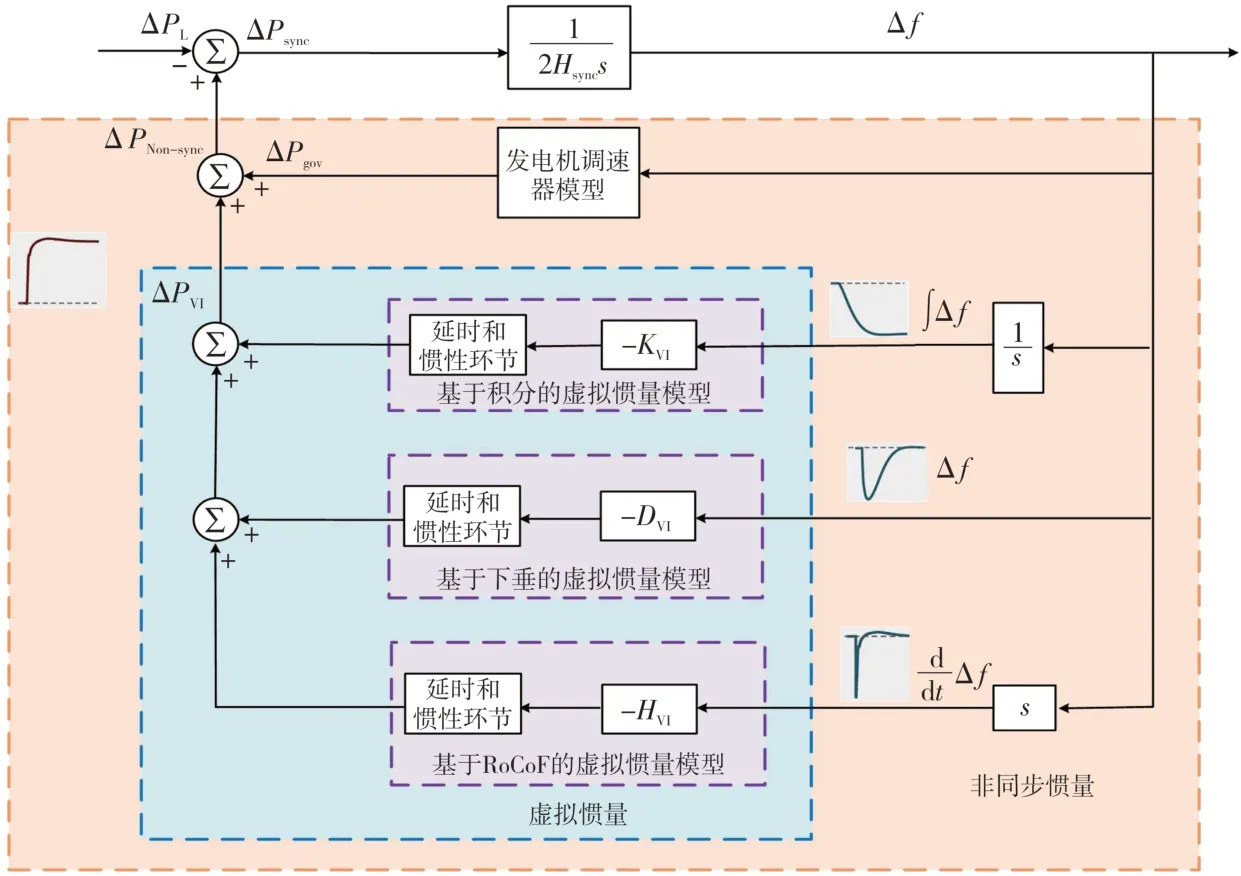
圖4 同步慣量和非同步慣量整體模型Fig.4 The aggregated model of synchronous inertia and asynchronous inertia
1.2.2 新能源機組虛擬慣量
目前電網中存在的新能源機組依靠逆變器向電網輸送功率,分為跟網型控制(電流源型新能源機組)和構網型控制(電壓源型新能源機組)兩類,如圖5所示,其中:Cpv為新能源出口側的濾波電容;Cdc為直流鏈路電容;d1和d2分別為DC/DC變流器和DC/AC逆變器開關管的占空比;θ和f分別為鎖相環輸出的相位角和頻率;θref和Vref分別為構網型控制的電壓參考相位角和幅值;Pref和Qref分別為構網型控制輸出的有功、無功功率參考值。

圖5 跟網型控制與構網型控制Fig.5 Grid-following control and grid-forming control
跟網型控制策略通過鎖相環跟蹤并網點的電壓相位,矢量電流控制基于并網點電壓的dq參考系定向,新能源機組作為功率源運行。構網型控制策略通過APC(有功功率控制)和APC(無功功率控制)調節并網變流器的輸出有功和無功功率,產生電壓基準的相位角和電壓幅值,并通過電壓控制回路調節逆變器輸出的電壓;該控制策略本身可以為系統提供頻率和電壓支撐,但是需要儲能環節提供穩定的直流電壓和額外的功率支撐。
通常情況下采用跟網型控制策略的新能源機組工作于最大可用功率點,其出力直接受天氣影響,不具備在頻率降低時發出額外有功功率的能力[19]。因此,為新能源機組配備儲能系統,可提升系統的整體功率可調性,系統可根據頻率變化主動調整其輸出功率,是實現頻率支撐的有效途徑[20-21]。文獻[22]利用光伏變流器直流側濾波電容作為儲能設備,將電容儲存的能量等效為轉子慣量,該控制策略需要配置較大的電容。此外,風電、光伏可以通過主動降載運行來預先儲備一部分功率,在功率可調裕量內,變流器根據母線頻率自適應調整風電、光伏出力,進而主動支撐頻率[23-24]。
對于采用跟網型控制策略的新能源機組而言,其輸出電流需要跟隨電網電壓相位的變化,具有功率源的特征,控制器的響應滯后于頻率變化。逆變器在檢測到電網頻率發生變化或接收到釋放額外功率的指令后,根據RoCoF或Δf調整輸出的有功功率參考值,經由內環的PI 控制完成對參考值的追蹤。考慮到通信環節,逆變器和濾波器、隔離變壓器等連接組件的延遲性,機組的頻率響應速度相對較慢,因此采用包含逆變器時間常數和連接組件時間常數的延遲或慣性環節的簡化慣量模型來表示跟網型控制的頻率特性:
式中:HVI和DVI分別為虛擬轉動慣量、虛擬阻尼的增益;Gdelay為圖4 中的延時和慣性環節,可以通過傳遞函數近似表示。
與同步發電機相比,跟網型逆變器調節有功功率存在一定的滯后,不能在擾動的瞬間響應頻率的變化,必須依靠同步慣量和阻尼。但是跟網型逆變器的響應速度比同步發電機的一次調頻更快,在時間尺度上與發電機轉子的慣性響應更為接近,采用較小的虛擬慣量即可實現與發電機調速器相比更好的調頻效果。如圖6所示,對不含虛擬慣量和含有光伏機組提供的虛擬慣量的系統進行負荷階躍擾動,其中發電機調速器的調差系數(1/R)與虛擬阻尼(DVI)之和相等,系統中的其他系數均相等。由圖6可知含有虛擬阻尼的系統頻率最低點較高,因此對新能源發電采用虛擬慣性控制策略,有利于系統的頻率穩定。
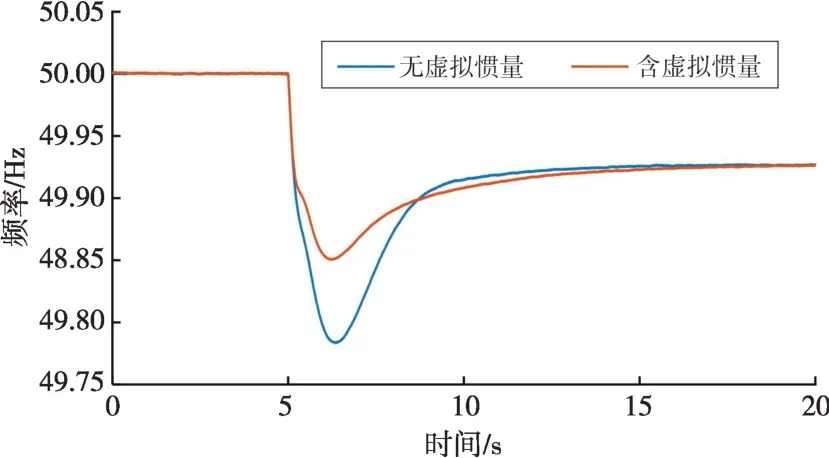
圖6 有、無跟網型控制虛擬慣量的頻率響應對比Fig.6 Comparison of frequency response with or without grid-following virtual inertia control
采用構網型控制的新能源機組可以根據輸出的有功功率來調節并網點電壓的相位及頻率,具有電壓源的特征,并網點電壓的相位不會發生突變,能夠不依靠電網獨立運行,實現組網功能。因此,構網型控制與同步發電機類似,無需添加其他控制策略即可實現對電網頻率的主動支撐。由于構網型控制由輸出的有功功率決定頻率,構網型控制具有的虛擬慣量可以視為同步慣量和阻尼,與同步發電機組的轉子和阻尼具有相同的作用。常見的構網型控制包括下垂控制和VSG(虛擬同步發電機)控制,其頻率-功率特性為:
構網型逆變器與同步發電機的頻率響應對比如圖7所示。相較于同步發電機,構網型逆變器具有更快的一次調頻速度,與具有相同調差系數和阻尼的發電機相比,受到相同的負荷階躍變化的擾動后,頻率更容易恢復穩定。但是構網型具有較低的轉動慣量,系統受到擾動后初始的RoCoF較大。
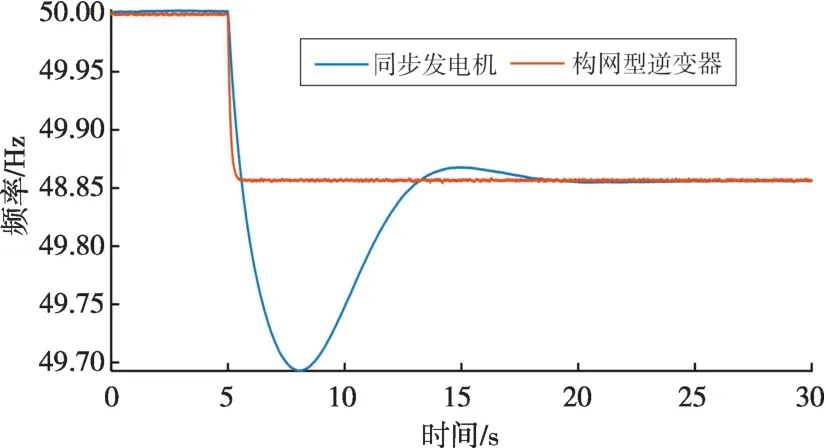
圖7 構網型逆變器與同步發電機的頻率響應對比Fig.7 Comparison of frequency responses of grid-forming inverter and synchronous generator
采用跟網型控制和構網型控制的新能源機組的虛擬慣量特征總結見表2。

表2 跟網型控制與構網型控制虛擬慣量對比Table 2 Comparison of virtual inertias of grid-following control and grid-forming control
2 電力系統慣量時空分布模型和實時感知方法
2.1 慣量的時空變化與區域劃分
復雜、多區域網絡結構受到擾動后,電氣距離較遠的各節點頻率量測不一定一致[25],考慮新能源機組出力隨機性與源荷空間分布差異性,需要建立以新能源為主體的新型電力系統慣量時空分布模型。
根據傳統同步發電機、新能源機組、負荷等在地理空間上的分布特性,以機組動態特性相似及電氣距離最短為指標,合理劃分區域。如圖8所示,同類型、控制策略相同、電氣距離較近的機組被劃分為一個區域。綜合考慮區域內不同設備的慣量響應過程,計算出整個系統的等效慣量。
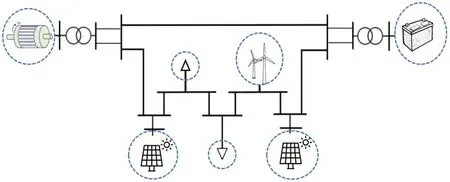
圖8 多區域電力系統Fig.8 Multi-regional power system
2.2 同步慣量、非同步慣量實時感知方法
2.2.1 測量同步慣量-改進多項式曲線擬合法
負荷的變化會導致系統RoCoF 和Δf的變化,如圖9所示。
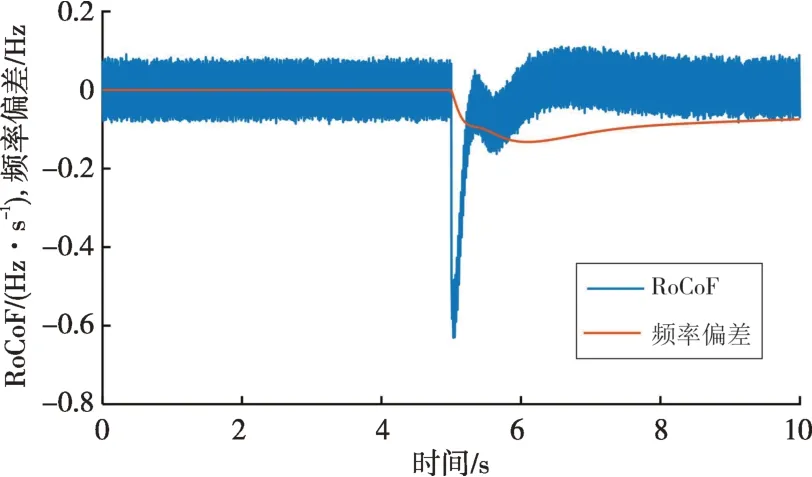
圖9 系統受擾動后的RoCoF與頻率偏差Fig.9 RoCoF and frequency deviations after system disturbance
由式(1)可知,在擾動發生的瞬間,系統的頻率偏差Δf=0,同步發電機的調速器和阻尼的影響只與Δf有關,對頻率的變化率沒有影響,DΔfpu項和ΔPm-pu項可以忽略。此時采用跟網型控制的機組提供的虛擬慣量還未發生作用,所以只有系統的同步慣量會影響RoCoF 的變化。對于一個已知的擾動,如果可以準確地量測擾動初始時刻(t=t0)的RoCoF,就能計算出系統的同步慣量:
式(6)中多項式每一項的系數A0,A1,…,An由曲線擬合的結果所決定,在t=t0時刻,多項式的主導部分是A1t,由此可以求得:
在傳統電網中,由于擾動后的較短時間內頻率的變化主要由發電機的轉動慣量決定,曲線較為簡單,采用較低階的多項式擬合頻率響應即可獲得較為準確的結果[26]。在含有虛擬慣性控制的新能源占比較高的電網中,頻率響應較為復雜,傳統方法測得的RoCoF 與實際情況可能誤差較大,因此測得的系統慣性不準確。但是,多項式擬合并非階數越高越好。本文提出了改進多項式曲線擬合的方法,可以更為準確地測量系統的Δfpu,進一步可以獲得同步慣量。
圖10展示了進行改進多項式曲線擬合的過程,其中輸入為頻率偏差Δf和功率變化ΔP,輸出為系統的同步慣量H。首先通過式(5),利用量測的RoCoF計算得到同步慣量的粗略估計值HRoCoF。然后初始化曲線擬合階數n=2,通過式(6)、式(7)進行曲線擬合得到對應的同步慣量Hn,如果Hn與HRoCoF偏差較大則表明擬合結果不夠理想,應舍去。當n+1 階多項式擬合結果和n階多項式擬合結果之差ΔH在容許的數值(本文為2.5%)之內時,擬合得到的同步慣量較為準確,輸出H作為最終的結果。若ΔH不滿足上述條件,則令n=n+1,重新進行曲線擬合。
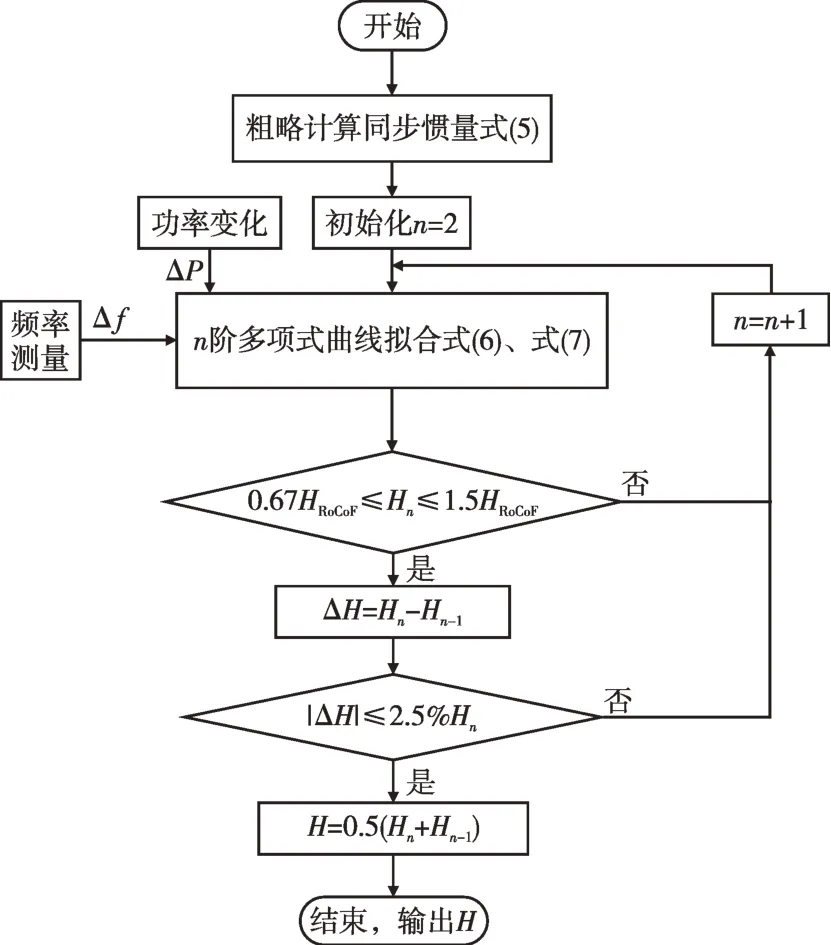
圖10 改進多項式曲線擬合法測量同步慣量Fig.10 Synchronous inertia measurement using improved polynomial curve fitting method
2.2.2 測量區域內慣量-系統辨識法
改進多項式曲線擬合法測量同步慣量只適用于規模小且網絡結構簡單的孤島運行的系統,系統內各點頻率幾乎一致,且系統中的同步慣量全部來源于系統內的同步發電機和構網型逆變器。因此,該系統的頻率變化只與系統內的慣量有關,將同步慣量的影響分離出去后即可得到非同步慣量的頻率-功率響應。但是在系統并入大電網運行時,系統內的頻率變化受大電網影響嚴重,無法確定系統內的同步慣量。此外,若某一區域中只包含跟網型逆變器,由于跟網型逆變器需要其他電源提供電壓支撐,不能獨立運行,必須排除區域外慣量的影響。
在某一區域進行負荷階躍擾動,獲得區域內的頻率變化和區域內跟網型逆變器的功率變化后,在已知系統的基本拓撲和輸入、輸出的情況下,采用系統辨識的方法可以確定跟網型逆變器提供的非同步慣量,即用傳遞函數去擬合基于RoCoF、頻率偏差、頻率積分的虛擬慣量以及測量與控制的延遲。如果跟網型逆變器的功率變化難以直接測量,根據功率平衡原理,可以采用負荷功率減去區域外功率變化的方法間接獲取。
與多項式曲線擬合類似,系統辨識的效果與選擇的傳遞函數階數有關。采用一階系統擬合計算復雜度低,但是辨識準確度可能受限;采用高階系統對提高辨識準確度有一定幫助,但是計算復雜度高,多區域聚合后形成的慣量模型表達式將更加復雜。因此,需要選取合適的傳遞函數階數。本文提出的系統辨識法測量非同步慣量如圖11所示,其中Gdelay為延時和慣性環節。首先用一階系統擬合輸入、輸出曲線(頻率變化曲線-功率變化曲線),其中傳遞函數的極點數目p=1,零點數目z=0。如果系統辨識的準確度在90%以上,且進行系統辨識的傳遞函數的零點數目和極點數目增加1 后,對系統辨識的準確度幾乎沒有影響,則輸出系統辨識的結果,根據系統辨識的結果可以確定虛擬慣量的大小和延時、慣性環節的傳遞函數表達式;反之若辨識準確度不高,則應當逐漸增加傳遞函數的零點數目和階次,直到系統辨識的結果符合要求為止。
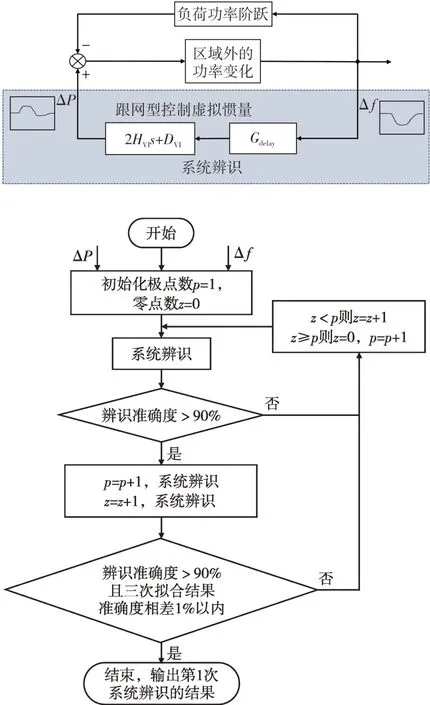
圖11 系統辨識法測量非同步慣量Fig.11 Asynchronous inertia measurement using system identification method
2.3 電力系統慣量分布模型和系統等效慣量
對于多機系統,考慮到光伏、風電等新能源機組出力的時變特性,需要研究在同一區域不同時間段的慣量變化;在同一時間尺度上,不同區域的慣量特性也不盡相同。不同時間段測量的不同區域的慣量,如圖12所示,該慣量水平可用于表示轉動慣量,也可以表示阻尼、虛擬慣量等。在多個慣量不足的相鄰區域內,受到擾動后更容易發生頻率越限事故。

圖12 不同時間、不同區域慣量水平對比Fig.12 Comparison of inertia levels in different regions at different times
進一步地,不同區域的慣量可以聚合為系統的慣量模型,其中相同類型的慣量按照不同機組的基準功率進行合并,整個系統的慣量Hsys可以表示為:
式中:Ssys為多個區域形成的系統的功率基準;N為區域總數;Sj和Hj分別為區域j內機組的功率基準、轉動慣量(同步慣量和虛擬慣量)。同理阻尼和基于頻率積分的慣量也符合式(8)的聚合方式,最終形成整個系統的慣量模型如圖4所示。該慣量模型對應的頻率變化視為整個系統慣量中心的頻率變化,由于機電擾動可在電網中長時間傳播,且機電波的傳播速度遠小于光速,系統中各節點的頻率變化不完全一致,但是均呈現出與慣量中心的頻率變化類似的趨勢[27]。
3 案例分析與頻率響應性能評估
3.1 慣量感知性能分析
采用IEEE 9節點系統進行案例分析,如圖13所示,其中新能源滲透率為50%,同步發電機轉子提供的同步慣量H=1.5 s(基準功率10 MVA),同步發電機的調差系數1/R=20,跟網型逆變器含有DVI=5的虛擬阻尼,在第1 s時加入3%(0.3 MW)的負荷階躍變化。

圖13 案例分析-IEEE 9節點系統Fig.13 Case analysis of IEEE 9-node system
首先進行同步慣量的估計,直接選取量測的最大RoCoF 進行計算,代入式(5)得到的HRoCoF=1.21,與實際值偏差較大。在采用曲線擬合之前需要首先確定曲線擬合的時間,其中較長時間的頻率偏差曲線需要更高階的多項式來擬合,較短時間的頻率偏差曲線需要更精準的頻率量測和更精確的擬合精度,本文采用第1 s至第1.5 s的頻率偏差曲線進行擬合。采用傳統的曲線擬合方法,選取4階多項式進行擬合,得到:
經曲線擬合得到的頻率偏差曲線和實際的頻率偏差曲線對比如圖14所示,兩者吻合程度較高。其中A1=-0.706 5,ΔP=-0.029 8,代入式(7)可以求得H=2.13,與實際值偏差較大。采用本文提出的改進多項式擬合法后,擬合結果如表3所示,求得H=1.47,更符合實際值。

表3 同步慣量計算值Table 3 Calculations of synchronous inertia
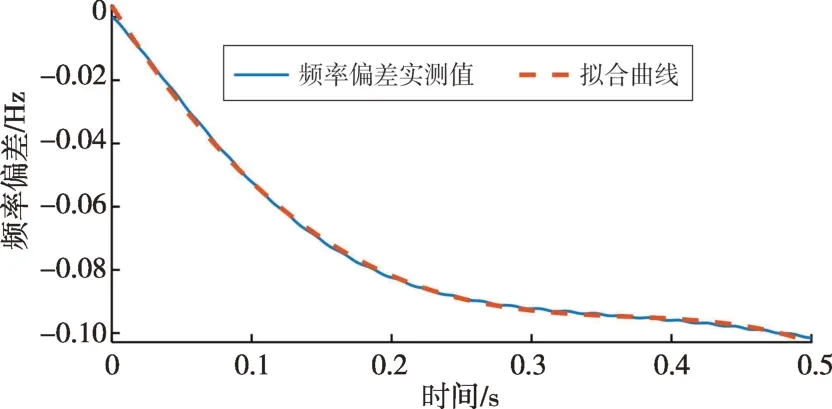
圖14 頻率偏差實測值與4階多項式擬合曲線對比Fig.14 Comparison of measured frequency deviations and fourth-order polynomial fitting curve
然后采用系統辨識法進行非同步慣量的估計。將提供虛擬慣量的跟網型逆變器劃分為一個區域,單獨測量區域內的頻率變化和跟網型逆變器發出功率的變化,采用圖11 中的方法,得到跟網型控制提供的虛擬慣量的表達式為:
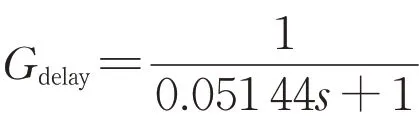
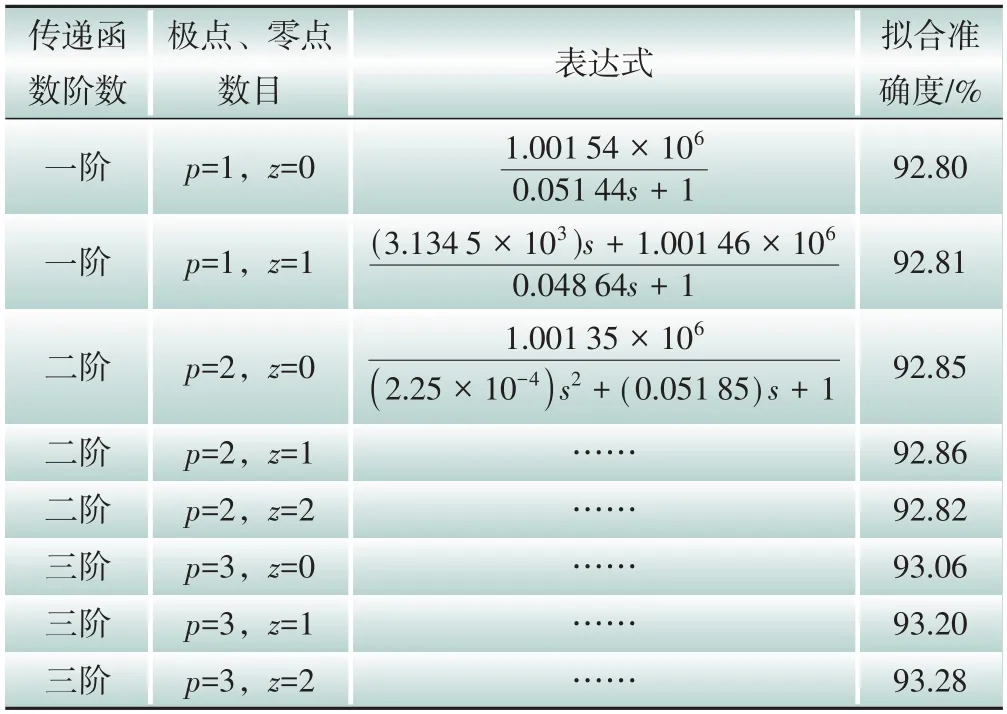
表4 系統辨識結果Table 4 System identification results
圖15 功率實測值與一階系統擬合曲線對比Fig.15 Comparation of measured power and the first-order system curve fitting
3.2 應對電網階躍擾動性能評估
以該IEEE 9 節點測試系統為例,進行系統等效慣量評估,根據測量的轉動慣量、新能源發電含有的虛擬慣量和發電機調速器模型,結合各機組的額定功率和容量,形成功率基準為10 MW的等值慣量數學模型。用該等值慣量模型模擬系統受到3%負荷擾動后的頻率變化,并與測試系統的仿真結果進行對比,如圖16所示。實際測量的頻率變化與采用等值慣量模型得到的頻率變化相似,這是由于實際系統的線路中含有電感、電容,擬合得到的慣量偏小,如果等值慣量模型受到擾動后未發生頻率越限,那么實際系統也不會發生頻率越限。
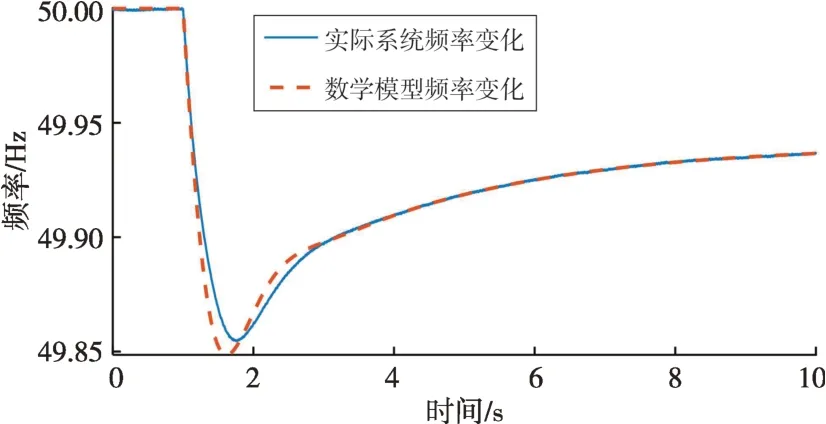
圖16 時域仿真與等值慣量模型頻率響應曲線對比Fig.16 Comparison of time domain simulation and frequency response curve of equivalent inertia model
對比不同類型的虛擬慣量的作用,其中跟網型逆變器分別采用了基于頻率偏差的虛擬慣性(DVI=5)和基于RoCoF的虛擬慣性(2HVI=5)。系統的頻率響應如圖17所示,對應的跟網型逆變器的功率變化如圖18所示。與無任何虛擬慣量的系統相比,加入基于RoCoF 的虛擬慣量(虛擬轉動慣量)在擾動發生后的短時間內即可降低系統的頻率變化率。轉動慣量高的系統頻率變化更慢,需要較長時間恢復穩定,對提升最低頻率的貢獻不大,對穩定后的系統頻率沒有影響。此外,跟網型逆變器在動態過程中需要快速跟蹤功率指令的變化,對頻率的準確測量也是影響控制效果的關鍵因素。加入基于頻率偏差的虛擬慣性(虛擬阻尼)在擾動初期并不能降低RoCoF,但更為有效地抬升了系統的頻率最低點,并且在頻率穩定之后逆變器釋放額外的功率以提升系統頻率。因此,系統在擾動后發生低頻減載的主要原因是缺少阻尼。
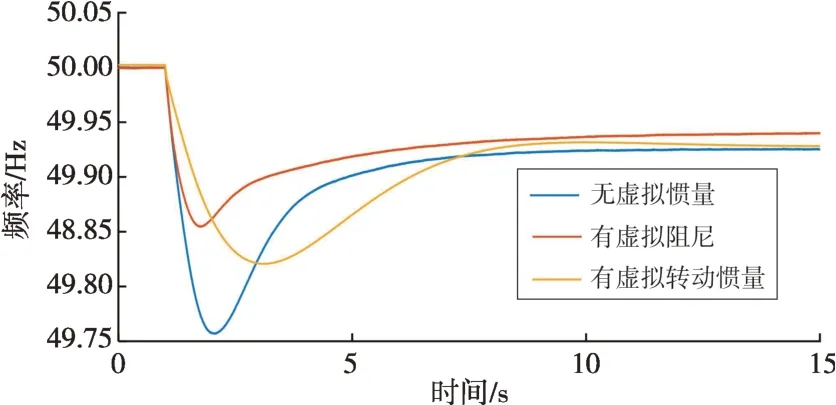
圖17 不同類型虛擬慣量頻率響應對比Fig.17 Comparison of frequency responses of different types of virtual inertias
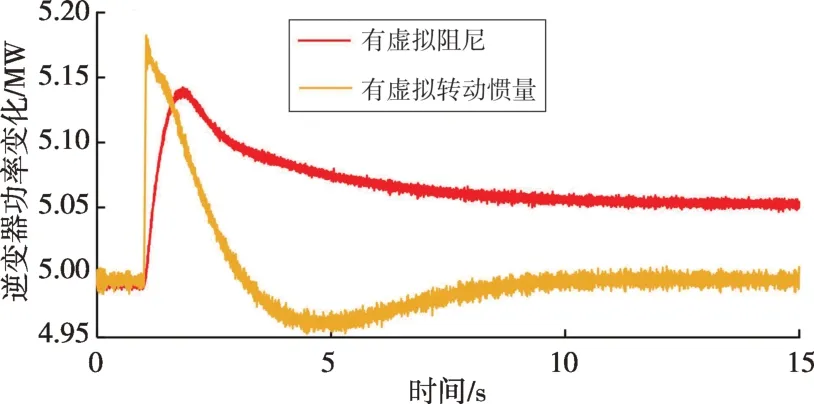
圖18 跟網型逆變器功率變化Fig.18 Power change of grid-following inverter
在3%負荷階躍作用下,評價慣量是否充足的指標包括最低頻率、穩定后頻率、最大RoCoF、穩定所需時間、不觸發低頻減載(低于49.7 Hz)系統可承受的最大負荷階躍,具體見表5。可以看出,含新能源提供的虛擬慣量的系統頻率穩定性顯著地高于不含虛擬慣量的系統。

表5 慣量是否充足的評估指標Table 5 Indicators of the adequacy of inertia
由表5 與圖17 可知,無論采用跟網型控制還是構網型控制,新能源機組提供的慣量并不能有效降低擾動瞬間的RoCoF,因此在含有高比例新能源的系統中,RoCoF 的瞬時值不宜作為評價慣量是否充足或進行低頻減載的標準。由于電力電子調頻裝置的動作速度快于發電機調速器的一次調頻,虛擬慣量對提升系統最低頻率的作用更加明顯。在新能源比例滲透率較高的情況下,應首先考慮受到擾動后的最低頻率和不觸發低頻減載時系統可承受的最大負荷階躍作為慣量是否充足的指標。此外,新能源出力的隨機性或間歇性可能導致提供虛擬慣量的機組出現慣量水平不足,因此需要合理安排機組出力和提高慣量管理能力。
4 結語
本文揭示了電力系統中慣量的特征,明確了新能源機組的頻率響應特性并建立了對應的數學模型,提出了對新型電力系統的同步慣量和非同步慣量的實時感知方法,最后在IEEE 9節點系統中對低轉動慣量場景下的頻率穩定特性進行評估。
本文提出的虛擬慣量數學模型準確地刻畫了同步發電機、跟網型和構網型逆變器的慣量響應過程。提出的改進多項式曲線擬合法可以準確測量系統中的轉動慣量,相較于傳統的直接測量法和曲線擬合法更適用于新能源滲透率較高的新型電力系統。提出的系統辨識法可以準確測量某一區域內的慣量,具有足夠的準確度和較低的計算復雜度,在此基礎上形成了電力系統慣量時空分布模型和慣量的等值數學模型。通過案例分析虛擬慣量對低轉動慣量電力系統頻率的影響,為系統頻率穩定提供決策分析支持。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
軍事文摘(2016年16期)2016-09-13 06:15:49
風能(2015年4期)2015-02-27 10:14:36
風能(2015年4期)2015-02-27 10:14:34
電力工程技術(2014年1期)2014-03-20 14:19:06
