基于RBF神經(jīng)網(wǎng)絡(luò)的進氣壓力控制方法研究
2024-03-11 01:22:56喬彥平郭迎清高紅崗
測控技術(shù) 2024年2期
關(guān)鍵詞:閥門
喬彥平, 郭迎清, 高紅崗
(1.西北工業(yè)大學 動力與能源學院,陜西 西安 710072; 2.中國航發(fā)四川燃氣渦輪研究院 高空模擬技術(shù)重點實驗室,四川 綿陽 621700; 3.西北工業(yè)大學 民航學院,陜西 西安 710072)
高空臺是能夠模擬航空發(fā)動機地面和空中飛行條件的大型試驗設(shè)備,對航空發(fā)動機的研制和發(fā)展起著至關(guān)重要的作用[1]。高空臺試驗過程中,在進行被試發(fā)動機的推力瞬變、遭遇起動、加減速等過渡態(tài)試驗時,發(fā)動機空氣流量變化速率達到5~30 kg/s2,對高空臺進氣壓力控制提出了極大的挑戰(zhàn)[2-3]。而進氣壓力模擬精度作為高空模擬試驗中非常重要的一項指標,直接關(guān)系到試驗的有效性[4-5]。
進氣壓力控制系統(tǒng)是一個復雜系統(tǒng),受到多種非線性因素的影響,被控對象難以精確建模。傳統(tǒng)的PID控制原理簡單,但對進氣壓力的控制往往需要有經(jīng)驗的操作員手動參與來保證過渡態(tài)時壓力調(diào)節(jié)的偏差在規(guī)定允許范圍內(nèi)。這種方式必然存在速度過快和重復性過高等方面的問題,且當前主流算法都是在PID基礎(chǔ)上進行小的修改[6-7],無法應對狀態(tài)量發(fā)生改變給系統(tǒng)控制精度和動態(tài)性能帶來的問題。
為提升過渡態(tài)過程中的壓力控制精度,需開展壓力自適應控制方法研究,實現(xiàn)過渡態(tài)時壓力的自適應控制。以深度學習為代表的人工智能技術(shù)為進氣壓力控制問題開啟了一條新的研究路徑,即基于數(shù)據(jù)驅(qū)動的機器學習方法在過渡態(tài)壓力控制中的應用。根據(jù)不同工作狀態(tài)下的輸入輸出數(shù)據(jù)流,運用神經(jīng)網(wǎng)絡(luò)等方法構(gòu)建一個近似模型[8-9],用來預測壓力控制系統(tǒng)的調(diào)節(jié)信號[10-11]。
本文針對進氣壓力過渡態(tài)控制,首先設(shè)計了基于RBF(Radial Basis Function,徑向基函數(shù))神經(jīng)網(wǎng)絡(luò)的最優(yōu)控制方法,然后在對試驗數(shù)據(jù)進行分析的基礎(chǔ)上,對面向進氣壓力控制問題所設(shè)計的RBF神經(jīng)網(wǎng)絡(luò)進行了訓練,最后對基于該RBF神經(jīng)網(wǎng)絡(luò)的壓力控制系統(tǒng)的調(diào)節(jié)品質(zhì)進行了測試。
1 基于RBF網(wǎng)絡(luò)的最優(yōu)控制架構(gòu)設(shè)計
1.1 輸入輸出信號的選取
利用RBF神經(jīng)網(wǎng)絡(luò)進行建模,首先需要確定神經(jīng)網(wǎng)絡(luò)的輸入和輸出。通過分析影響高空臺進氣壓力控制系統(tǒng)的因素,選取的輸入輸出信號如圖1所示。

圖1 RBF神經(jīng)網(wǎng)絡(luò)的輸入輸出選取
圖1中,Si表示系統(tǒng)壓力在i時刻的設(shè)定值和反饋值以及發(fā)動機在i時刻的狀態(tài)參數(shù),Ai表示所有調(diào)節(jié)氣體壓力的閥門在i時刻的控制量。
1.2 控制策略方案和架構(gòu)設(shè)計
針對氣體壓力控制中非線性、高耦合的性質(zhì),基于數(shù)據(jù)驅(qū)動構(gòu)建系統(tǒng)控制模型,采用機器學習的方法探索過渡態(tài)最優(yōu)協(xié)同控制策略。為實現(xiàn)過渡態(tài)最優(yōu)協(xié)同控制策略,神經(jīng)網(wǎng)絡(luò)的訓練和根據(jù)實時數(shù)據(jù)獲取最優(yōu)控制策略是需要研究的重點問題。基于機器學習獲取最優(yōu)控制策略的方案如圖2所示。

圖2 基于機器學習獲取最優(yōu)控制策略的方案
RBF神經(jīng)網(wǎng)絡(luò)的訓練是一個重要的環(huán)節(jié),RBF神經(jīng)網(wǎng)絡(luò)隱藏節(jié)點數(shù)量和基函數(shù)的參數(shù)確定對網(wǎng)絡(luò)結(jié)果影響較大。采用梯度下降法作為訓練方法,均方誤差作為損失函數(shù),訓練RBF神經(jīng)網(wǎng)絡(luò),形成輸入輸出信號的非線性映射關(guān)系模型,根據(jù)實時輸入信號快速輸出預測的狀態(tài)。基于數(shù)據(jù)驅(qū)動的智能控制原理架構(gòu)如圖3所示。

圖3 基于數(shù)據(jù)驅(qū)動的智能控制原理架構(gòu)
2 基于RBF神經(jīng)網(wǎng)絡(luò)的進氣壓力控制系統(tǒng)模型設(shè)計
2.1 系統(tǒng)結(jié)構(gòu)分析
系統(tǒng)的氣路原理如圖4所示,其中閥門212連接高壓常溫氣源與混合器,閥門213連接高壓負溫氣源與混合器,通過2條管路將不同溫度的氣流混合,調(diào)節(jié)這2個閥門就可以調(diào)節(jié)混合器內(nèi)空氣的溫度;閥門231、閥門232連接混合器與大氣,用于調(diào)節(jié)混合器內(nèi)壓力;閥門241、閥門242連接混合器與前室,用于調(diào)節(jié)進氣壓力。
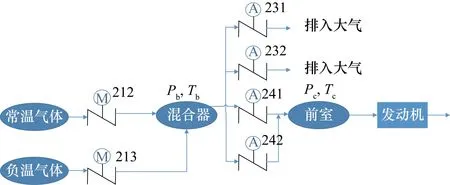
圖4 系統(tǒng)的氣路原理
系統(tǒng)運行過程中,設(shè)定混合器和前室壓力值,要求混合器和前室氣壓始終維持在這一給定值附近,但由于發(fā)動機狀態(tài)的改變,會影響到前室和混合器內(nèi)壓力的變化,為維持混合器和前室氣壓的穩(wěn)定,需要閥門231、閥門232、閥門241、閥門242這4個閥門參與調(diào)節(jié),這些閥門協(xié)同運作,可保證混合器和前室氣壓的穩(wěn)定。
2.2 問題分析
將壓力控制問題的建模作為一個函數(shù)擬合問題,搭建神經(jīng)網(wǎng)絡(luò)模型,經(jīng)過大量數(shù)據(jù)訓練擬合出輸入與輸出間的關(guān)系,最終使模型能夠預測不同輸入情況下系統(tǒng)的輸出,從而達到自動控制的效果。依據(jù)之前的分析,混合器與前室之間通過閥門連接,混合器與前室各自壓力變化對彼此都會產(chǎn)生影響,是高度耦合的,而閥門231、閥門232和閥門241、閥門242也協(xié)同作用于整個系統(tǒng),進而維持各個腔內(nèi)空氣壓力的動態(tài)平衡,也是高度耦合的,因而不適合將各個容器或閥門單獨拆分出來進行分析。因此,神經(jīng)網(wǎng)絡(luò)的模型輸入應包含發(fā)動機轉(zhuǎn)速、空氣流量、混合器壓力設(shè)定值、混合器壓力測量值、前室壓力設(shè)定值、前室壓力測量值這6個變量,模型輸出為閥門231、閥門232、閥門241、閥門242的開度控制量。通過對試驗數(shù)據(jù)的分析,在調(diào)節(jié)系統(tǒng)壓力平衡過程中,閥門232和閥門242的開度幾乎不變,在此為了降低網(wǎng)絡(luò)維度,確定模型輸出為閥門231、閥門241的開度控制量。
2.3 模型結(jié)構(gòu)及設(shè)計
RBF神經(jīng)網(wǎng)絡(luò)的基本思想是用RBF作為隱單元的“基”構(gòu)成隱含層空間,這樣就可以將輸入矢量直接映射到隱含層空間,而不需要通過權(quán)連接。當RBF的中心點確定以后,這種映射關(guān)系也就隨之確定了。
RBF神經(jīng)網(wǎng)絡(luò)應用于進氣壓力控制時,每個時刻的輸入為系統(tǒng)當前狀態(tài)和發(fā)動機狀態(tài),輸出為對各閥門的控制量。RBF神經(jīng)網(wǎng)絡(luò)隱含層神經(jīng)元的激活函數(shù)為RBF,并將輸入空間轉(zhuǎn)換為到最近中心點的距離空間,把輸入向量從低維映射到高維,將線性不可分問題轉(zhuǎn)換為線性可分問題。
構(gòu)建的RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖5所示。作為3層單向傳播的前饋網(wǎng)絡(luò),其包含了輸入層、隱含層和輸出層。
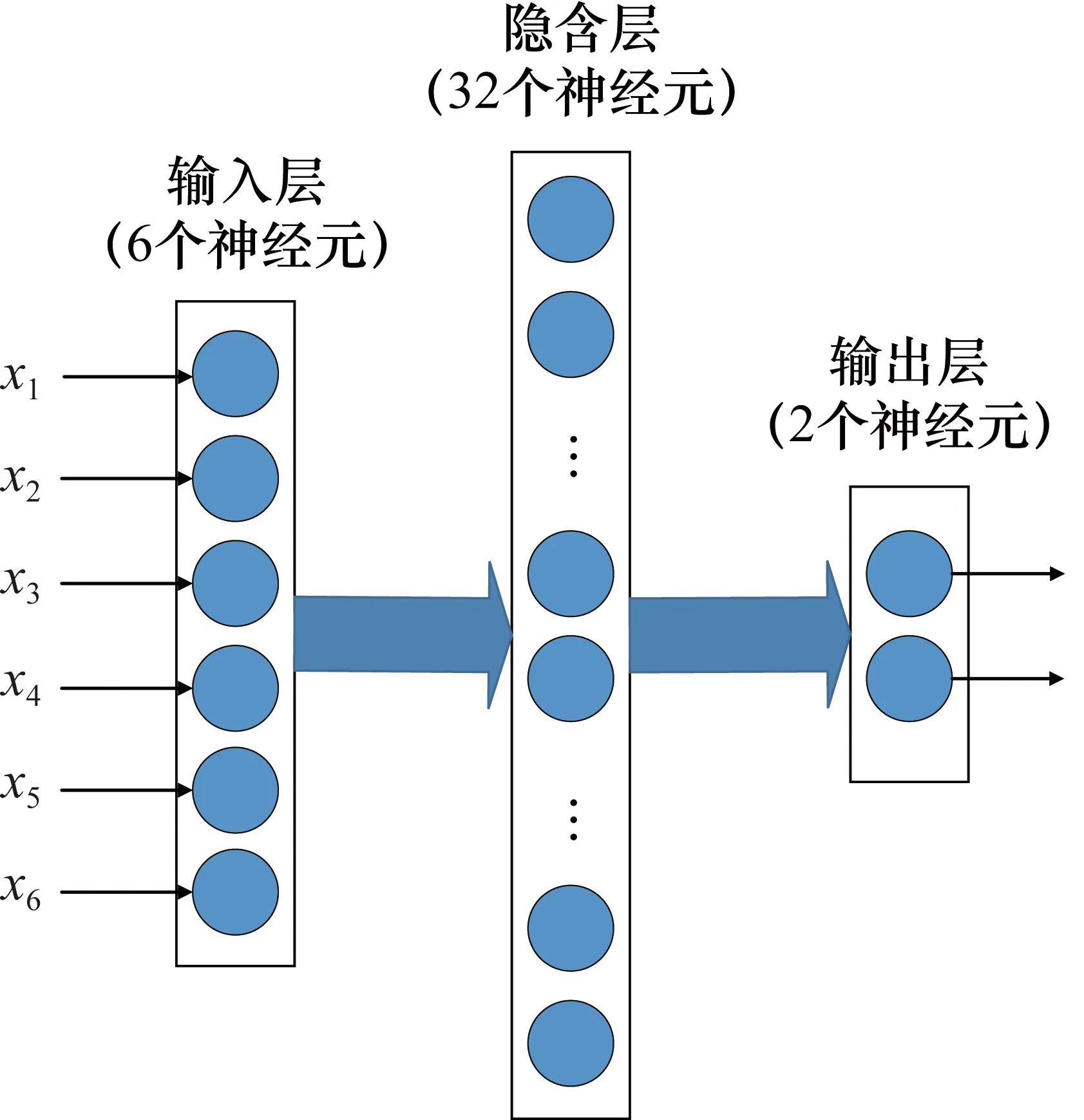
圖5 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖
輸入層由信號源節(jié)點組成,表示輸入維度,隱含層是非線性的,其采用高斯函數(shù)作為RBF,從而將輸入向量空間轉(zhuǎn)換到隱含層空間,使線性不可分的問題變得線性可分。隱含層的神經(jīng)元個數(shù)一般取2的指數(shù),由試驗可知,隱含層由32個徑向基神經(jīng)元組成時效果最好。輸出層則是由線性加權(quán)映射得到的。在RBF網(wǎng)絡(luò)架構(gòu)中,x=[x1,x2,x3,x4,x5,x6]T為網(wǎng)絡(luò)模型的輸入向量,y=[y1,y2]T為輸出向量。
RBF選用高斯基函數(shù),則從輸入層到隱含層的公式為
(1)
式中:bj為方差;‖·‖為歐幾里得范數(shù);Cj=[cj1,cj2,…,cj6]T為第j個基函數(shù)的中心節(jié)點,cj為可以決定該基函數(shù)圍繞中心點的寬度的參數(shù)且是可以自由選擇的,在這里,cj的初始值隨機生成,隨著網(wǎng)絡(luò)的訓練而不斷更新;m為隱含層節(jié)點個數(shù)。
從隱含層到輸出層的公式即為隱含層的加權(quán)表達式:
(2)
式中:wkj為第j個RBFhj到輸出yk的加權(quán)。
網(wǎng)絡(luò)輸出的損失函數(shù)J為
(3)

訓練模型采用沿負梯度下降的方法使損失函數(shù)最小。
3 仿真分析
對圖4中手動調(diào)節(jié)過的進氣壓力控制系統(tǒng)進行測量,采集了4組試驗實測數(shù)據(jù),數(shù)據(jù)的特征包括發(fā)動機轉(zhuǎn)速、空氣流量、混合器壓力設(shè)定值、混合器壓力測量值、前室壓力設(shè)定值、前室壓力測量值、閥門231和閥門241開度控制量,其中,前6個特征作為網(wǎng)絡(luò)的輸入X,后2個特征作為網(wǎng)絡(luò)的參考輸出Y。將這4組(Datasheet1、Datasheet2、Datasheet3、Datasheet4)試驗實測數(shù)據(jù)作為訓練數(shù)據(jù)和測試數(shù)據(jù),對所建立的RBF神經(jīng)網(wǎng)絡(luò)進行訓練和測試,驗證設(shè)計的基于數(shù)據(jù)驅(qū)動的壓力控制方法的可行性。首先選取小規(guī)模數(shù)據(jù)對RBF神經(jīng)網(wǎng)絡(luò)進行訓練和測試,然后利用大規(guī)模數(shù)據(jù)進行驗證。
3.1 模型的訓練和測試
3.1.1 小規(guī)模數(shù)據(jù)仿真
選取Datasheet1的全部數(shù)據(jù)和Datasheet2的前25 000組數(shù)據(jù),共56 595組數(shù)據(jù)作為訓練數(shù)據(jù);選取Datasheet2剩余數(shù)據(jù)(共62 907組數(shù)據(jù))作為測試數(shù)據(jù)。部分訓練數(shù)據(jù)的形式如表1所示。

表1 部分訓練數(shù)據(jù)
將RBF網(wǎng)絡(luò)訓練了100輪,訓練時長為3 195.83 s。測試時,遍歷所有測試數(shù)據(jù)的時長為34.51 s,平均每條數(shù)據(jù)測試時長0.000 5 s(即反映從獲取到一組輸入進而給出預測輸出的時間,在給定試驗環(huán)境中預測響應時間小于1 ms)。閥門231開度控制量和閥門241開度控制量的真實值與預測值對比如圖6所示。

圖6 小規(guī)模數(shù)據(jù)預測效果
3.1.2 大規(guī)模數(shù)據(jù)仿真
隨機選取Datasheet3、Datasheet4中的一半試驗數(shù)據(jù)作為訓練數(shù)據(jù);選取Datasheet3、Datasheet4的所有數(shù)據(jù)作為測試數(shù)據(jù)。RBF網(wǎng)絡(luò)訓練用時15 332.18 s,訓練完成后,對網(wǎng)絡(luò)進行測試,測試用時201 s,共372 223組數(shù)據(jù),平均每條數(shù)據(jù)測試時長0.000 5 s。閥門231開度控制量和閥門241開度控制量的真實值與預測值對比如圖7所示。

圖7 大規(guī)模數(shù)據(jù)預測效果
由圖7可見,在試驗末尾階段,閥門開度的數(shù)據(jù)變化幅度大,控制器無法及時調(diào)整開度,所測量的數(shù)據(jù)為失真數(shù)據(jù)。針對Datasheet3、Datasheet4試驗數(shù)據(jù)中的這些極端數(shù)據(jù),將這2組數(shù)據(jù)中的異常數(shù)據(jù)刪除,形成數(shù)據(jù)集Datasheet3_1、Datasheet4_2。在Datasheet3_1、Datasheet4_2數(shù)據(jù)集中隨機取一半數(shù)據(jù)作為訓練數(shù)據(jù),用全部的數(shù)據(jù)進行測試。網(wǎng)絡(luò)訓練時長為12 486.76 s,訓練完成后,對網(wǎng)絡(luò)進行測試,測試用時160.64 s,平均每條數(shù)據(jù)測試時長0.000 5 s。閥門231開度控制量和閥門241開度控制量的真實值與預測值對比如圖8所示。
3.2 結(jié)果分析
由上述試驗結(jié)果計算RBF網(wǎng)絡(luò)的預測值與真實值的誤差,誤差計算公式為
(4)

小規(guī)模數(shù)據(jù)因數(shù)據(jù)量少理論上應預測得更準確,而大規(guī)模數(shù)據(jù)相對而言預測誤差較大。表2對誤差情況進行了統(tǒng)計,其結(jié)果也反映了RBF網(wǎng)絡(luò)在小規(guī)模數(shù)據(jù)上的誤差小于大規(guī)模數(shù)據(jù)。

表2 RBF神經(jīng)網(wǎng)絡(luò)控制模型測試結(jié)果誤差統(tǒng)計
由表2可以看出,通過小規(guī)模數(shù)據(jù)訓練后的RBF神經(jīng)網(wǎng)絡(luò)的預測結(jié)果與真實值的誤差較小,大規(guī)模數(shù)據(jù)測試結(jié)果的誤差比小規(guī)模數(shù)據(jù)測試結(jié)果的誤差大了一些,但誤差均處于較小的水平。小規(guī)模數(shù)據(jù)只對采集的小部分數(shù)據(jù)進行了訓練和測試,RBF網(wǎng)絡(luò)訓練小規(guī)模數(shù)據(jù)更容易收斂,因此在小規(guī)模數(shù)據(jù)上誤差較小。試驗中,小規(guī)模數(shù)據(jù)測試結(jié)果的誤差與大規(guī)模數(shù)據(jù)的誤差的差別不大,當精度要求不高時,采用小規(guī)模數(shù)據(jù)對網(wǎng)絡(luò)進行訓練就可以滿足要求且訓練時間更短。由表2可知,閥門最大控制誤差為閥門231的最大控制誤差,數(shù)值為3.11%。閥門231的平均控制誤差在采用大規(guī)模數(shù)據(jù)時最大,為1.04%,閥門241的平均控制誤差在采用大規(guī)模數(shù)據(jù)和刪去異常數(shù)據(jù)后的大規(guī)模數(shù)據(jù)時是一樣的,都為0.47%。由于大規(guī)模數(shù)據(jù)的閥門231平均控制誤差和閥門241平均控制誤差較大,取大規(guī)模數(shù)據(jù)的2個閥門平均控制誤差來衡量RBF網(wǎng)絡(luò)控制的表現(xiàn),整個RBF神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)的平均誤差為閥門231和閥門241平均控制誤差的總和的平均數(shù),為0.755%,因此均值誤差約為1%。
通過該方法,不需要人為地對控制系統(tǒng)進行精準參數(shù)調(diào)節(jié),也不需要對各個控制閥門進行關(guān)系解耦,RBF神經(jīng)網(wǎng)絡(luò)使系統(tǒng)能夠達到自動控制的效果。結(jié)果表明,RBF神經(jīng)網(wǎng)絡(luò)預測的自動控制策略誤差較小,并且預測時間較短,控制效果良好。
4 結(jié)論
通過本文研究,得到結(jié)論如下:
① 以高空臺的進氣壓力調(diào)節(jié)系統(tǒng)為對象,設(shè)計了基于RBF神經(jīng)網(wǎng)絡(luò)的最優(yōu)控制架構(gòu),搭建了RBF神經(jīng)網(wǎng)絡(luò)模型,為研究工作提供了基礎(chǔ)。
② 利用4組試驗實測數(shù)據(jù)作為訓練數(shù)據(jù)和測試數(shù)據(jù),對所建立的RBF神經(jīng)網(wǎng)絡(luò)進行訓練和測試。測試結(jié)果表明所設(shè)計的控制方法針對被試發(fā)動機加減速等過渡態(tài)試驗進氣壓力控制問題,進氣調(diào)節(jié)閥預測控制精度峰值誤差小于4%,平均誤差約為1%,預測響應時間小于1 ms,精度和預測實時性能夠滿足過渡態(tài)壓力的控制要求。
③ 總體而言,本文所設(shè)計的基于RBF神經(jīng)網(wǎng)絡(luò)模型的最優(yōu)控制架構(gòu)是可行的,不僅減少了有經(jīng)驗的操作員手動參與的步驟,而且預測時間較短,可以滿足進氣壓力控制實時性的要求。
猜你喜歡
流程工業(yè)(2022年3期)2022-06-23 09:41:10
流程工業(yè)(2022年3期)2022-06-23 09:41:08
流程工業(yè)(2022年3期)2022-06-23 09:41:02
流程工業(yè)(2022年3期)2022-06-23 09:40:50
流程工業(yè)(2022年5期)2022-06-23 07:19:22
流程工業(yè)(2022年5期)2022-06-23 07:19:16
中國核電(2021年3期)2021-08-13 08:57:02
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
智富時代(2018年5期)2018-07-18 17:52:04
