小型巡飛彈螺旋槳布局氣動(dòng)特性研究
2024-03-11 09:12:16郭拉鳳楊成偉葉波波佘牟楊
機(jī)械設(shè)計(jì)與制造工程 2024年2期
林 暢,趙 熹,楊 宇,郭拉鳳,楊成偉,葉波波,佘牟楊
(1.中北大學(xué)航空宇航學(xué)院,山西 太原 030051)
(2.北京理工大學(xué)長三角研究院(嘉興),浙江 嘉興 314000)
(3.北京理工大學(xué)機(jī)電學(xué)院,北京 100081)
巡飛彈是一種具備偵察和制導(dǎo)功能的小型低成本智能彈藥[1]。螺旋槳是低速小型巡飛彈常用的推進(jìn)裝置,目前后置螺旋槳?jiǎng)恿Σ季直粡V泛采用。相關(guān)學(xué)者針對(duì)螺旋槳對(duì)飛行器性能影響的研究主要包括兩個(gè)方面:一方面?zhèn)戎赜趯?duì)多個(gè)螺旋槳在不同布局下的氣動(dòng)性能研究,如Ghoreyshi等[2]研究了不同相位角和間距對(duì)串列雙螺旋槳推力和扭矩的影響;Zanotti等[3]研究了在軸向間距確定的條件下不同槳盤重疊程度對(duì)串列螺旋槳性能的影響;湯斯佳等[4]以共軸對(duì)轉(zhuǎn)螺旋槳為研究對(duì)象,對(duì)比了4種槳間距下共軸對(duì)轉(zhuǎn)螺旋槳的推進(jìn)效率;de Vries等[5]研究了并列螺旋槳的相互作用對(duì)螺旋槳效率的影響。另一方面?zhèn)戎赜趯?duì)螺旋槳與飛行器氣動(dòng)耦合效應(yīng)的研究,如Westcott等[6]通過改變傾轉(zhuǎn)旋翼無人機(jī)前置、后置螺旋槳的角度研究了螺旋槳位置對(duì)機(jī)翼氣動(dòng)性能的影響;Cho[7]研究了中置布局的增升作用及其對(duì)俯仰力矩的影響;Wang等[8]提出了一種中置布局的螺旋槳增升雙翼結(jié)構(gòu),利用螺旋槳的干擾提高機(jī)翼的氣動(dòng)性能;陳廣強(qiáng)等[9]研究了后置布局的螺旋槳對(duì)整機(jī)氣動(dòng)特性的影響。目前,針對(duì)大型高速螺旋槳推進(jìn)飛行器的研究已經(jīng)較為充分,但對(duì)于螺旋槳對(duì)小型低速巡飛彈氣動(dòng)性能的影響及其氣動(dòng)耦合效應(yīng)的研究尚少。
計(jì)算流體力學(xué)(computational fluid dynamics,CFD)方法作為一種高精度模擬方法已經(jīng)發(fā)展出了多種模擬方法,包括多參考系(multiple reference frame, MRF)法[10]、滑移網(wǎng)格(sliding mesh model, SMM)法[11]和嵌套網(wǎng)格(overset mesh model,OMM)法[12]等。由于風(fēng)洞測試成本高昂,且小尺度、低雷諾數(shù)的風(fēng)洞精度難以滿足需求[13],因此CFD方法仍是研究小型巡飛彈氣動(dòng)特性的重要手段。基于這一背景,本文以某型巡飛彈及其適配的折疊螺旋槳為研究對(duì)象,基于CFD方法對(duì)比分析了前置、后置布局的螺旋槳?dú)鈩?dòng)性能,并進(jìn)一步分析不同布局螺旋槳與巡飛彈的氣動(dòng)耦合效應(yīng)。
1 計(jì)算模型
1.1 前置/后置螺旋槳布局
本文的研究對(duì)象為某小型固定翼巡飛彈,主要技術(shù)參數(shù)見表1。該巡飛彈采用直徑為13英寸、螺距為8英寸的螺旋槳。前置布局的螺旋槳安裝于巡飛彈機(jī)身頭部,與頭部間距為44 mm;后置布局的螺旋槳位于巡飛彈機(jī)身尾部,與巡飛彈機(jī)身尾部后端面間距為44 mm。兩種布局形式的螺旋槳旋轉(zhuǎn)軸均位于機(jī)身軸線,為便于折疊,螺旋槳的槳間距設(shè)計(jì)值為70 mm。兩種布局形式的結(jié)構(gòu)示意如圖1所示。
表1 某型巡飛彈主要參數(shù)

圖1 兩種布局的計(jì)算模型
1.2 氣動(dòng)性能表征參數(shù)
本文用于表征巡飛彈氣動(dòng)特性的參數(shù)主要有升力系數(shù)CL、阻力系數(shù)CD以及升阻比K,見式(1)~(3):
(1)
(2)
(3)
式中:L為巡飛彈的飛行升力,N;D為巡飛彈的飛行阻力,N;ρ為標(biāo)準(zhǔn)狀況平均海面下的大氣密度,取值為1.225 kg/m3;v為飛行速度,m/s;S為機(jī)翼參考面積,取值0.29 m2。
本文用于表征螺旋槳?dú)鈩?dòng)特性的參數(shù)主要有不同前進(jìn)比λ下的拉力系數(shù)CT,見式(4)~(5):
(4)
(5)
式中:N為螺旋槳轉(zhuǎn)速,r/min;d為螺旋槳直徑,m;T為螺旋槳拉力,N。
2 數(shù)值模擬方法及驗(yàn)證
2.1 數(shù)值模擬方法選擇
對(duì)于螺旋槳?dú)鈩?dòng)力的求解,CFD方法基于真實(shí)模型計(jì)算,相較于理論分析方法更加接近真實(shí)物理狀態(tài),相較于風(fēng)洞測試更便捷、高效且精度也得到了驗(yàn)證。在已有的多種方法中,MRF法和SMM法由于計(jì)算效率高,在螺旋槳的數(shù)值模擬中得到廣泛應(yīng)用。
本文對(duì)研究對(duì)象的13英寸×8英寸螺旋槳分別進(jìn)行地面試驗(yàn)和數(shù)值模擬。地面試驗(yàn)利用商用無人機(jī)動(dòng)力測試臺(tái)在無來流的狀態(tài)下進(jìn)行螺旋槳測試,如圖2所示。數(shù)值模擬分別采用MRF和SMM方法,選擇Realizablek-e湍流模型,運(yùn)用混合網(wǎng)格生成技術(shù)生成網(wǎng)格[14],計(jì)算區(qū)域交界處采用多面體網(wǎng)格填充,其余部分為六面體非結(jié)構(gòu)化網(wǎng)格,網(wǎng)格數(shù)量為6萬。通過比較螺旋槳地面試驗(yàn)和數(shù)值模擬(MRF法和SMM法)的拉力和扭矩?cái)?shù)據(jù),在上述兩種數(shù)值模擬方法中選擇一種作為本文CFD仿真計(jì)算的方法。

圖2 無人機(jī)動(dòng)力測試臺(tái)
地面試驗(yàn)和數(shù)值模擬結(jié)果如圖3所示,由圖可知,兩種數(shù)值模擬方法的結(jié)果都能較好地吻合地面試驗(yàn)結(jié)果。轉(zhuǎn)速在2 000~8 800 r/min時(shí),MRF法的最大拉力與地面試驗(yàn)結(jié)果的誤差為3.1%,最大扭矩誤差為9%;SMM法的最大拉力誤差為10%,最大扭矩誤差為27%。轉(zhuǎn)速在8 800~12 000 r/min時(shí),MRF方法的最大拉力與地面試驗(yàn)結(jié)果的誤差為13.06%,最大扭矩誤差為4.5%;SMM方法的最大拉力誤差為2.41%,最大扭矩誤差為12.41%。總體來看,在低轉(zhuǎn)速下,MRF方法的計(jì)算結(jié)果與地面試驗(yàn)結(jié)果更接近,隨著轉(zhuǎn)速提高,兩種方法的計(jì)算誤差均有所增大。但是,由于SMM方法對(duì)計(jì)算資源的要求高,計(jì)算耗時(shí)長,為了兼顧計(jì)算效率和計(jì)算準(zhǔn)確性,本文選擇MRF方法進(jìn)行數(shù)值模擬計(jì)算。

圖3 兩種數(shù)值模擬方法及地面試驗(yàn)結(jié)果對(duì)比
2.2 網(wǎng)格無關(guān)性驗(yàn)證
不同網(wǎng)格數(shù)量下的數(shù)值計(jì)算結(jié)果可能存在差異[15]。為了盡可能減少網(wǎng)格數(shù)量,加快計(jì)算速度同時(shí)保證計(jì)算精度,針對(duì)計(jì)算模型進(jìn)行網(wǎng)格無關(guān)性驗(yàn)證。利用ANSYS Fluent Meshing[16]生成4組不同數(shù)量的計(jì)算網(wǎng)格,分別為47萬、108萬、186萬、227萬,旋轉(zhuǎn)流域部分網(wǎng)格與2.1節(jié)保持一致。其中,186萬網(wǎng)格的對(duì)稱剖視圖如圖4所示。

圖4 計(jì)算區(qū)域
在0°迎角、30 m/s來流速度下對(duì)不同數(shù)量計(jì)算網(wǎng)格進(jìn)行仿真計(jì)算,對(duì)比不同數(shù)量計(jì)算網(wǎng)格的巡飛彈升力系數(shù)CL,結(jié)果如圖5所示。由圖可以看出,網(wǎng)格數(shù)量大于186萬以后,升力系數(shù)趨于穩(wěn)定,不同網(wǎng)格數(shù)量下的升力系數(shù)最大誤差為10.1%。綜合考慮計(jì)算效率和精度,本文數(shù)值模擬的網(wǎng)格數(shù)量確定為186萬。

圖5 網(wǎng)格無關(guān)性驗(yàn)證
3 計(jì)算結(jié)果
3.1 不同布局螺旋槳?dú)鈩?dòng)性能分析
影響不同布局螺旋槳?dú)鈩?dòng)性能的主要因素是巡飛彈機(jī)身的干擾。對(duì)于后置布局的螺旋槳,其槳盤來流受到機(jī)身的干擾,導(dǎo)致氣動(dòng)性能下降;對(duì)于前置布局螺旋槳,其槳盤后的下洗氣流易被機(jī)身阻擋,導(dǎo)致工作效率降低。由于巡飛彈所用的螺旋槳多為折疊槳,與傳統(tǒng)的直槳相比,折疊槳葉之間有一定的槳間距,而槳間距也直接決定了螺旋槳受機(jī)身干擾的程度。因此,本文針對(duì)不同槳間距的螺旋槳,分析了不同布局下的螺旋槳?dú)鈩?dòng)性能,仿真工況見表2。

表2 不同布局螺旋槳CFD仿真工況
前置布局的槳盤來流不受機(jī)身干擾,因此在前進(jìn)比為0.40~0.50時(shí),前置布局的拉力表現(xiàn)優(yōu)于后置布局,并且隨著槳間距增大更為明顯。槳間距為100 mm時(shí),前置布局相較于后置布局拉力系數(shù)最大增加了7.4%,主要原因是隨著槳間距增大,后置布局受機(jī)身的干擾程度減小。在高來流速度下,機(jī)身干擾對(duì)螺旋槳的影響不明顯,因此隨著前進(jìn)比增大,兩種布局的拉力系數(shù)差距逐漸減小,如圖6所示。

圖6 兩種布局拉力與槳間距的關(guān)系
在槳間距為70 mm條件下,當(dāng)前進(jìn)比小于0.50時(shí),前置布局的拉力系數(shù)大于后置布局;前進(jìn)比大于0.50之后,前置布局的拉力系數(shù)小于后置布局且下降速度明顯快于后置布局,如圖7所示。取前進(jìn)比為0.45、0.65時(shí)前置、后置布局的巡飛彈對(duì)稱剖面的速度云圖進(jìn)行分析,結(jié)果如圖8所示。

圖7 70 mm槳間距前進(jìn)比-拉力系數(shù)曲線

圖8 兩種布局速度云圖對(duì)比
由圖可以看出,前進(jìn)比為0.45時(shí),前置布局的槳盤來流相對(duì)穩(wěn)定,而后置布局的槳盤來流受到機(jī)身的干擾,導(dǎo)致螺旋槳?dú)鈩?dòng)性能下降;前進(jìn)比大于0.65時(shí),隨著前進(jìn)比增大,后置布局巡飛彈機(jī)身對(duì)槳盤來流的干擾作用減弱,但對(duì)來流的減速作用更加顯著,槳葉根部的氣流速度明顯降低,使螺旋槳?dú)鈩?dòng)性能得到一定的提升。因此后置布局的拉力系數(shù)高于前置布局。
3.2 不同布局螺旋槳與巡飛彈的氣動(dòng)耦合效應(yīng)分析
1)對(duì)巡飛彈阻力系數(shù)的影響。
數(shù)值計(jì)算結(jié)果表明,前置布局的巡飛彈阻力系數(shù)大于后置布局,如圖9所示,隨著前進(jìn)比增大兩種布局的阻力系數(shù)差異逐漸減小,兩者最大差距出現(xiàn)在前進(jìn)比為0.40時(shí),前置布局比后置布局大28.3%。進(jìn)一步對(duì)前置、后置布局的巡飛彈對(duì)稱剖面的速度云圖進(jìn)行分析,如圖10所示。

圖9 阻力系數(shù)

圖10 前進(jìn)比為0.40時(shí)的速度云圖
由圖可知,前置布局阻力系數(shù)較高的原因是前置布局對(duì)流經(jīng)巡飛彈的氣流加速作用更加明顯,增大了巡飛彈的阻力。
2)對(duì)巡飛彈升力系數(shù)的影響。
由于螺旋槳對(duì)流經(jīng)機(jī)翼氣流的加速作用,因此在不同的前進(jìn)比下前置布局的升力系數(shù)均比后置布局高出10%左右,如圖11所示。進(jìn)一步分析兩種布局下翼根處的速度云圖,如圖12所示,由圖可知,前置布局機(jī)翼根部氣流的氣流速度明顯高于后置布局。
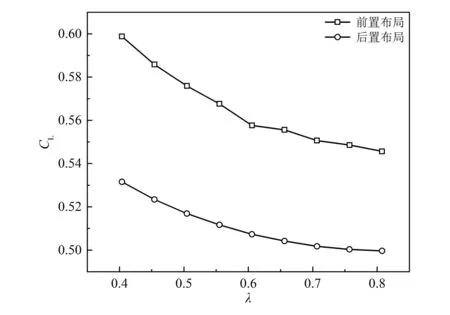
圖11 兩種布局升力系數(shù)對(duì)比

圖12 前進(jìn)比為0.45時(shí)的翼根速度云圖
3)對(duì)巡飛彈升阻比的影響。
計(jì)算結(jié)果表明,隨著前進(jìn)比增大,巡飛彈的升阻比增高且后置布局的升阻比高于前置布局,在前進(jìn)比為0.40時(shí)兩者差距最大,相差1.01,如圖13所示。

圖13 兩種布局升阻比對(duì)比
根據(jù)1)的分析結(jié)果,在前進(jìn)比較小時(shí)前置布局的阻力顯著大于后置布局,但兩種布局的拉力系數(shù)相近,導(dǎo)致升阻比差距較大。隨著前進(jìn)比增大,前置布局螺旋槳對(duì)氣流的加速作用和后置布局機(jī)身對(duì)來流的減速作用逐漸減弱,因此兩者的阻力系數(shù)差距逐漸減小,從而導(dǎo)致升阻比差異減小。
4 結(jié)論
本文通過數(shù)值模擬,研究了不同布局巡飛彈螺旋槳的氣動(dòng)性能以及螺旋槳與巡飛彈的氣動(dòng)耦合效應(yīng),得出如下結(jié)論:
1)在70 mm的槳間距下,螺旋槳有效避開了巡飛彈機(jī)身的尾流影響,因此兩種布局形式對(duì)螺旋槳?dú)鈩?dòng)特性的影響并不顯著,但與整彈的氣動(dòng)耦合效應(yīng)明顯。
2)前、后置布局的螺旋槳對(duì)流經(jīng)巡飛彈的氣流都有加速作用,其中前置布局的影響更為明顯。前置布局的整彈升力系數(shù)、阻力系數(shù)均有明顯增加,升力系數(shù)最大增加12.65%,阻力系數(shù)最大增加28.32%。后置布局的升阻比高于前置布局。
考慮滑流作用對(duì)飛機(jī)機(jī)翼氣動(dòng)影響的分布式螺旋槳布局優(yōu)化設(shè)計(jì)方法,對(duì)促進(jìn)螺旋槳飛機(jī)動(dòng)力/氣動(dòng)布局一體化設(shè)計(jì)理念的發(fā)展有一定意義。在螺旋槳滑流影響下,對(duì)分布式螺旋槳飛機(jī)動(dòng)力布局和氣動(dòng)外形進(jìn)行一體化優(yōu)化設(shè)計(jì),提升分布式推進(jìn)飛機(jī)氣動(dòng)特性,是后續(xù)研究的重要方向。
