撓性航天器的自耦PD姿態控制方法
2024-03-12 12:51:04黃利容曾喆昭
空間控制技術與應用 2024年1期
黃利容, 曾喆昭, 曾 鵬
長沙理工大學,長沙 410076
0 引 言
隨著航天重大工程的逐步實施,現代航天器通常需要搭載多種撓性附件[1],如太陽能電池板和大型天線等.然而,由于姿態控制系統中存在外部干擾,撓性附件會帶來嚴重的振動問題,從而影響姿態控制的效果.隨著航天器在空間領域的廣泛應用,對姿態的控制精度要求也越來越高,因此,保持航天器的高精度姿態控制且能夠有效抑制撓性附件的振動仍然具有很大的挑戰性[2].
近年來,國內外學者們對于航天器的姿態控制提出了許多有效的控制方法.文獻[3]考慮到航天器系統參數的不確定性,提出了一種可以在線更新定律的自適應魯棒控制器,有著較好的增益魯棒性.文獻[4]設計了一種與模型無關的無量綱級聯姿態反饋自抗擾控制器,在航天器存在參數不確定性以及外部干擾的情況下依舊可以取得有效的控制.文獻[5]研究參數不確定撓性航天器的T-S模糊模型,并結合并行分布式補償技術設計了非線性模糊控制器,取得了良好的控制效果.文獻[6]基于終端滑模控制提出了一種具有有限時間內收斂的自適應控制方法,有效提高了系統的響應速度以及抗干擾能力.文獻[7]將線性矩陣不等式與凸優化算法結合,設計了魯棒輸出反饋控制器,實現了航天器姿態的穩定控制.文獻[8]設計了一種自適應雙閉環姿態控制器,通過引入一個虛擬有界的角速度,將姿態控制問題降階為角速度控制問題.文獻[9]結合變結構控制策略和范數自適應估計算法設計了自適應魯棒容錯控制器,對存在參數不確定性以及執行器部分失效的航天器取得了有效的姿態控制.文獻[10]采用預設性能方法設計航天器的姿態控制器,可以保證控制過程的暫態響應,并引入強化學習算法以解決航天器的慣量不確定性問題.文獻[11]提出了魯棒模型預測姿態控制方法,可將實際的航天器系統驅使到預設的以標稱軌跡為中心的“管道”不變集內,并沿著標稱軌跡到達平衡點,實現了在外部擾動下航天器姿態角的快速控制.文獻[12]通過將神經網絡和障礙李雅普諾夫函數結合來處理航天器模型參數的不確定性以及未知擾動,然后根據反步法設計了魯棒自適應姿態控制器.然而上述方法皆屬于集中控制,僅僅通過姿態控制器去抑制撓性附件的振動難以取得令人滿意的效果,因此須引入主動振動控制器抑制撓性附件的振動,以此來取得更好的控制效果[13].
對于主動振動控制器的設計,文獻[13]采用了預設性能控制(prescribed performance control,PPC)方法,該方法通過預先定義的性能函數和誤差變換,使得閉環系統的收斂速度、超調量和穩態誤差保持在預定范圍內,可以獲得預期的抑制效果.文獻[14]設計了多模態正位置反饋主動振動控制器,有效提高了撓性附件的阻尼,從而提高了航天器系統的穩定性.文獻[15]首次提出了一種結構較為簡單的全自適應分量合成振動抑制(fully adaptive component synthesis vibration suppression,FACSVS)控制方法,該方法計算量較小并對振動頻率的不確定性具有較好的魯棒性.文獻[16]設計了全階滑模主動振動控制器有效減少撓性附件的振動,從而使得撓性振動模態在有限時間內快速衰減.
然而航天器是一個多輸入多輸出的系統,撓性結構與航天器主體之間又具有較強的耦合,導致現有的姿態控制器以及主動振動控制器結構復雜且存在大量矩陣的運算,不利于工程實際,因此在考慮外部干擾和模型參數不確定性的情況下,既可以保持高性能的姿態控制和強魯棒性的主動振動控制,又能優化控制器結構的方法有待進一步研究.曾喆昭教授[17-18]為此提出一類新型的控制理論,即自耦PID(ACPID)控制理論.ACPID控制理論方法的主要優勢如下:
1)ACPID控制器不僅保留了傳統PID控制器簡單的優勢,且P、I和D這3個環節只由一個速度因子統一驅動,因而只需鎮定一個速度因子;
2) 由過渡過程時間tr來鎮定速度因子,簡單實用:① ACPID的速度因子鎮定規則:zc=10α/tr,1<α≤10;②ACPD與ACPI的速度因子鎮定規則:zc=20α/tr,1<α≤10;
3)ACPID、ACPD與ACPI控制系統都是臨界阻尼系統,因而都具有良好的魯棒穩定性和動態響應特性;
4)ACPID控制理論將已知或未知動態及其不確定性以及外部有界擾動等一切復雜因素定義為一個總擾動,則可將復雜非線性系統等價映射為線性擾動系統[19-21],淡化了線性與非線性系統分類的概念.
本文的主要貢獻在于將ACPID控制理論應用于撓性航天器系統,分別設計了ACPD姿態控制器與ACPD主動振動控制器,取得了良好的控制效果:在面臨外部干擾以及模型參數不確定的情況下可以取得航天器姿態的高精度控制,并能使撓性附件的振動快速衰減.
1 撓性航天器的數學模型
1.1 系統描述
根據文獻[22],受到外部干擾情況下撓性航天器的動力學模型可表示如下:
(1)
(2)
式中,ω=[ω1ω2ω3]T為航天器相對慣性坐標系的姿態角速度,J∈R3×3為航天器的轉動慣量矩陣,u=[u1u2u3]T為控制輸入力矩,d∈R3×1為外部干擾力矩,考慮具有五階撓性模態的情況,則柔性附件的模態坐標向量η=[η1η2η3η4η5]T,δ∈R5×3為航天器剛體與柔性附件的耦合矩陣,C=2ξΩ為阻尼矩陣,K=Ω2為剛度矩陣,ξ和Ω分別為振動模態的阻尼比和自然頻率,δa∈R5×5為壓電作動器與柔性附件的耦合矩陣,up=[up1up2up3up4up5]T為壓電作動器的輸入電壓.對于任意三維向量ν=[ν1ν2ν3]T,ν×表示反對稱矩陣
本文采用修正的羅德里格斯參數(modified rodrigues parameters,MRP) 來描述航天器的姿態角,MRP定義為σ=φtan(φ/4)=[σ1σ2σ3]T∈R3×1,其中,φ∈R3×1表示為歐拉主軸向量,φ表示為歐拉旋轉角,σi(i=1,2,3)表示為MRP每個軸的姿態角.則航天器的姿態運動學方程[16]為
(3)
其中,G(σ)=0.25[(1-σTσ)I3+2σσT+2σ×],I3為3×3單位矩陣.
結合式(1)、(2)和(3)可得受外部擾動下的撓性航天器系統為
(4)
1.2 系統映射


(5)
式中,uσ、uη為虛擬控制力,uσ=[uσ1uσ2uσ3]T=G(σ)J-1u,uη=[uη1uη2uη3uη4uη5]T=-δaup.
2 ACPD控制系統設計
2.1 ACPD虛擬控制器設計

(6)

根據ACPID控制理論思想[17-18]可得ACPD姿態控制器的控制力矩為
(7)
u=JG-1(σ)uσ
(8)
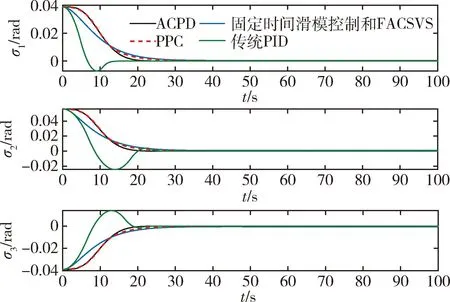
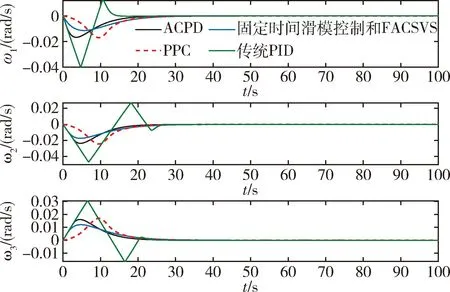
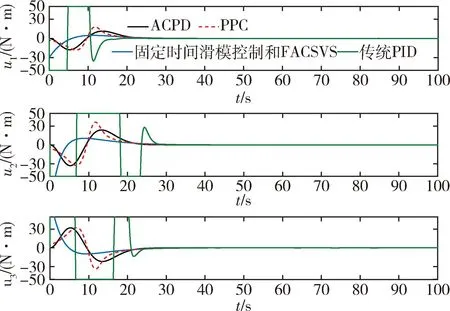
其中,|ui|≤uim(i=1,2,3),uim為控制力矩ui的最大幅值,zσ=zσI3,0 (9) 根據ACPID控制理論思想[17-18]可得ACPD主動振動控制器的控制電壓為 (10) (11) 其中,zη=zηI5,0 證明.將式(7)代入受控誤差系統(6),可得子控制系統為 (12) (13) 由式(13)可得系統傳遞函數為 (14) 當0 由式(14)可得系統的單位沖激響應為 hσi(t)=texp(-zσt)ε(t) (15) 由式(15)可得受控誤差系統的時域形式為 (16) 其中,“*”表示卷積積分運算. (17) 由式(15)可知,當0≤t<∞時,hσi(t)≥0,且hσi(∞)=0,因而有 (18) 將式(18)代入式(17),可得穩態誤差為 (19) 外部擾動是總擾動的一部分,在總擾動有界情況下,由式(19)可知:增加速度因子可以顯著降低穩態誤差,提高抗擾動能力,因而ACPD姿態控制系統具有良好的抗擾動魯棒性,證畢. 定理2的證明參照定理1,此處不再贅述. 由定理1與定理2可知,當速度因子大于0時,ACPD姿態控制系統和ACPD主動振動控制系統都是魯棒穩定的,且速度因子越大,控制系統的穩態精度則越高,抗擾動能力則越強,否則反之.然而,在啟動控制初期,速度因子過大,則會導致控制力過大而出現超調現象.因此為防止姿態控制出現超調現象,在基于文獻[20]的基礎上使用自適應速度因子模型.主動控制器則需要更大的速度因子來有效抑制撓性附件的振動,則本文選擇的速度因子模型如下所示: (20) zη=20α2/tη (21) 其中,1<α≤10,tσ、tη是由動態過程進入穩態過程的過渡過程時間. 將本文的ACPD姿態控制器與ACPD主動振動控制器應用于撓性航天器系統,為了驗證本文控制方法的有效性,進行仿真試驗和分析,并與文獻[13]和文獻[15]所提出的方法進行比較分析. 仿真試驗中,角速度的初值為ω(0)=[0 0 0]T,MRP的初始值為σ(0)=[0.038 9 0.056 0 -0.038 9]T,MRP的期望值為σd=[0 0 0]T,撓性模態的初始值為η(0)=[0 0 0 0 0]T.撓性航天器系統的參數選自文獻[13],其具體數值如表1所示,姿態控制力矩的最大值為uim=50 N·m,撓性控制電壓的最大值為0.01 V. 表1 仿真參數Tab.1 Simulation parameters 假設撓性航天器在高度500 km的軌道上運行,則外部干擾包括干擾力矩、大氣干擾和其他環境干擾,如下所示[13]: d=0.01× 其中,Ω1=Ω(1,1),Ω2=Ω(2,2),Ω3=Ω(3,3). ACPD控制方法、文獻[13]以及文獻[15]控制方法的控制器結構如下: (1)ACPD姿態控制器與ACPD主動振動控制器結構 (22) (23) (2)文獻[13]固定時間滑模姿態控制器與FACSVS主動振動控制器結構 (24) (25) (3)文獻[15]PPC姿態控制器與PPC主動振動控制器結構 (26) (27) 表2 3種控制器的控制參數Tab.2 Control Parameters of Three Controllers 將3種控制方法應用于撓性航天器,其仿真結果如圖1~5所示,顯然3種控制方法都能實現撓性航天器的有效控制.在ACPD控制方法下,撓性航天器的姿態角和角速度的收斂時間約為20 s,需要的最大力矩為34 N·m,其五階撓性振動模態的最大值分別為8.3×10-4、1.7×10-4、4.5×10-4、1.5×10-4和3.7×10-4,衰減時間約為20 s;在固定時間滑模控制和FACSVS主動振動控制下,撓性航天器的姿態角和角速度的收斂時間約為30 s,需要的最大力矩為50 N·m,其五階撓性振動模態的最大值分別為1.6×10-2、3.4×10-3、5.4×10-3、1×10-3和1.9×10-3,衰減時間約為30 s;在PPC方法下,撓性航天器的姿態角和角速度的收斂時間約為25 s,需要的最大力矩為36 N·m,其五階撓性振動模態的最大值分別為9.2×10-4、2.6×10-4、8.8×10-4、2.3×10-4和1×10-3,衰減時間約為20 s;在PID控制方法下,撓性航天器的姿態角和角速度的收斂時間約為28 s,需要的最大力矩為50 N·m,其五階撓性振動模態的最大值分別為9.4×10-4、4.1×10-4、4.6×10-4、4.4×10-4和3.8×10-4,衰減時間約為25 s. 圖1 姿態角變化曲線Fig.1 The response of attitude angular 圖2 角速度變化曲線Fig.2 The response of angular velocity 圖3 控制力矩變化曲線Fig.3 The response of control torque 圖4 模態坐標變化曲線Fig.4 The response of modal coordinate 圖5 控制電壓變化曲線Fig.5 The response of input voltage 不同控制方法的控制精度如表3所示,結合圖1~5可知,本文所提出的ACPD控制方法,能有效抑制撓性附件的振動,使得姿態角以及角速度更快收斂,且具有更高的控制精度. 表3 不同控制方法的穩態精度Tab.3 Steady-state accuracy of different control methods 為了進一步驗證本文所提出的ACPD控制方法的魯棒性,保持本文控制器的參數不變,考慮航天器的轉動慣量矩陣J、剛體與柔性附件的耦合矩陣δ以及自然頻率Ω存在偏差,失配程度如表4所示.姿態角σ1的控制結果如圖6所示,撓性模態η1的控制結果如圖7所示. 圖6 姿態角σ1變化曲線Fig.6 The response of MRPs σ1 圖7 模態坐標η1變化曲線Fig.7 The response of modal coordinate η1 表4 參數失配程度Tab.4 Parameter mismatch degree 由圖6可知,試驗1和試驗4的姿態控制效果基本一致,試驗2和試驗3的姿態角σ1控制效果基本一致,可以看出參數δ以及Ω基本不影響姿態控制效果;由圖7可知,試驗2和試驗3的撓性模態η1控制效果基本一致,可以看出參數Ω基本不影響撓性模態控制效果,4組試驗控制下,姿態角σ1的控制精度均為1×10-6,撓性模態η1的控制精度均為1×10-7數量級.以上分析表明了ACPD控制方法具有良好的魯棒性. 針對撓性航天器的控制問題,本文基于ACPID控制理論分別設計了ACPD姿態控制器與ACPD主動振動控制器.仿真結果表明本文控制方法的有效性,在帶有外部擾動以及模型不確定性的情況下,可以取得良好的控制性能:響應速度快、控制精度高和魯棒性強.本文控制方法的突出優勢是控制系統結構簡單,計算量小,僅涉及2個速度因子的鎮定,而且通過過渡過程時間tσ和tη來鎮定速度因子,因而簡單實用.文獻[13]和文獻[15]的控制方法涉及更多的矩陣運算,導致控制器結構復雜,計算量大并且需要鎮定的參數過多,因而本文提出的ACPD控制方法更便于工程實際.2.2 ACPD主動振動控制器設計


2.3 控制系統分析





2.4 速度因子鎮定
3 仿真分析







3.1 控制器對比分析仿真試驗



3.2 魯棒性分析仿真試驗
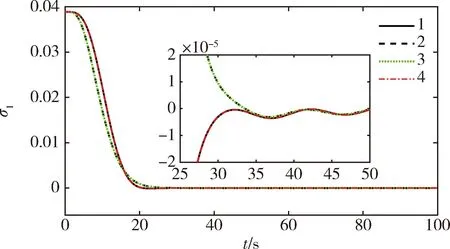
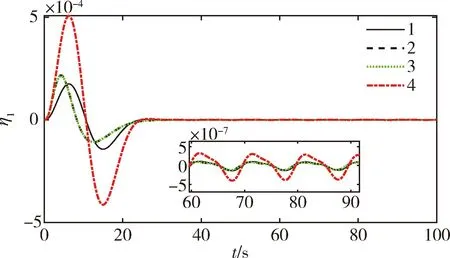
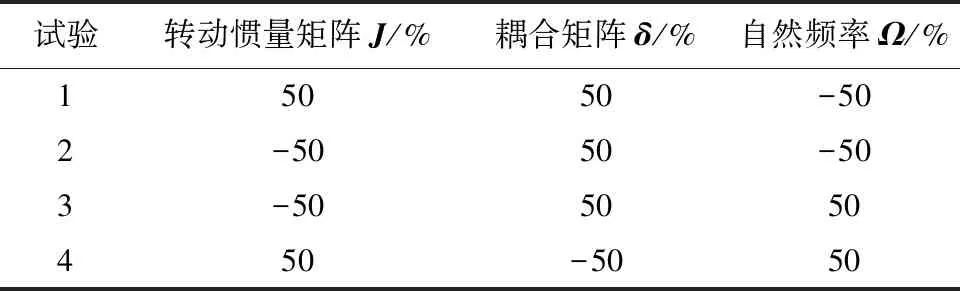
4 結 論
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14天天愛科學(2020年6期)2020-09-10 07:22:44數學物理學報(2017年6期)2018-01-22 02:26:40Coco薇(2016年2期)2016-03-22 02:42:52湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年4期)2015-05-19 14:47:56上海電機學院學報(2015年4期)2015-02-28 14:30:00計算物理(2014年2期)2014-03-11 17:01:44計算物理(2014年2期)2014-03-11 17:01:39
