基于TRIZ與可拓創(chuàng)新方法的機械產(chǎn)品概念設計方法研究
2024-03-13 02:45:38熊宗慧曹東升胡平平何志琪
機床與液壓 2024年3期
熊宗慧,曹東升,胡平平,何志琪
(新疆大學智能制造現(xiàn)代產(chǎn)業(yè)學院,新疆烏魯木齊 830047)
0 前言
隨著社會的進步以及個性化消費需求的不斷增長,產(chǎn)品的競爭越來越激烈,新產(chǎn)品的開發(fā)面臨著不斷變化的需求、各種制約因素和充滿活力的市場,這些因素對新產(chǎn)品的設計效率和創(chuàng)新提出了更高的要求。在產(chǎn)品設計的生命周期中,概念設計是最具創(chuàng)新性的階段,包括了從客戶需求信息的分析到新產(chǎn)品功能實現(xiàn)的所有過程,是產(chǎn)品創(chuàng)新思維形成的關鍵階段,它已成為產(chǎn)品開發(fā)創(chuàng)新的核心環(huán)節(jié),也是提高產(chǎn)品質量、降低成本和增強企業(yè)競爭力的主要手段[1]。其創(chuàng)新性和效率對于新產(chǎn)品的競爭性開發(fā)至關重要,而概念設計方法的應用很大程度上決定了概念設計的效率、質量和創(chuàng)新性。
在產(chǎn)品設計階段常用的創(chuàng)新方法有公理化設計、TRIZ(Theory of Inventive Problem Solving)理論、質量功能布置理論,可拓創(chuàng)新方法(Extension Innovation Method)等。其中TRIZ理論以其良好的可操作性和實用性,自誕生以來一直廣泛應用于工程技術領域,用于解決工程設計中的難題,能夠有效提高創(chuàng)新速度。許多學者將TRIZ用于產(chǎn)品的概念設計階段,用于形成創(chuàng)新設計方案。文獻[2]將質量功能展開理論和TRIZ理論結合,提出一種系統(tǒng)化設計流程的建筑結構自動布局機器人概念設計。文獻[3]應用TRIZ理論指導秸稈微粉碎機的概念設計,有效提高了秸稈微粉碎效率。文獻[4]將遺傳算法與TRIZ結合,解決設計目標之間存在的沖突。文獻[5]將TRIZ與公理設計相結合,建立概念設計過程模型并對海草夾苗機械手進行概念創(chuàng)新設計。TRIZ在解決矛盾沖突問題以及方案上有得天獨厚的優(yōu)勢。但是,在產(chǎn)品概念設計中產(chǎn)品需求獲取以及方案評價方面,TRIZ工具仍存在分析難、具體化難和量化評價難的問題。可拓創(chuàng)新方法是中國原創(chuàng)的用于求解矛盾問題的理論,其特點為操作流程形式化、定性與定量相結合,可拓創(chuàng)新方法具有較強的分析問題和邏輯推理形式化能力,其中的優(yōu)度評價法被廣泛運用于各領域方案評價中。文獻[6]把可拓方法應用于機械產(chǎn)品概念設計中,建立了可拓設計模型。文獻[7]將可拓邏輯與共軛分析等方法應用于需求分析與配置規(guī)劃中,解決了需求動態(tài)增長等問題。文獻[8]將可拓優(yōu)度評價法運用于定制類汽車產(chǎn)品概念設計方案的評價與決策中。文獻[9]在可拓第三創(chuàng)造法的基礎上融入了相關分析和衡量指標,細化了產(chǎn)品概念設計流程。文獻[10-11]將可拓學與因果鏈、裁剪方法相結合,通過基元形式化表達,增強了設計方法的客觀性。可拓理論具有較強的邏輯推理形式化能力,但是缺乏良好的產(chǎn)品原理解或方案的生成能力。
綜上所述,本文作者在已有的研究基礎上,將TRIZ與可拓創(chuàng)新方法各自的優(yōu)勢相結合運用于機械產(chǎn)品概念設計中,綜合考慮可拓學形式化的模型和分析問題的優(yōu)勢,以及TRIZ工具解決沖突問題的能力,提出一種集成TRIZ與可拓創(chuàng)新方法的概念設計方法,以期為產(chǎn)品概念設計的智能化、快速化提供支持。
1 集成可拓與TRIZ的概念設計方法
1.1 需求分析與基元模型構建
用戶需求是產(chǎn)品創(chuàng)新的驅動力,預期產(chǎn)品的設計需求往往是模糊的,因此分析用戶需求并建立功能-約束模型是設計開發(fā)過程中的重要環(huán)節(jié)。可拓學具有形式化的模型和流程化的問題求解方法,規(guī)范了知識的形式和問題求解的步驟,具有嚴謹?shù)目茖W性和嚴密的邏輯推理能力,適用于問題分析。可拓學中用三元組形式的基元模型B=(O,C,V) 來描述某對象O(物、動作或關系)具有特征C,且該特征對應量值為V,其優(yōu)勢在于形式化與定量化結合,能夠定量定性地表現(xiàn)不同模型之間的關聯(lián)性,因此可用于分析復雜問題。
例如描述清理污水管道的需求時可以用事元模型表述為
其中管道信息O1可以用物元表示為
利用可拓學基元形式化的模型,將客戶提出的模糊需求轉化為定性定量特征需求參數(shù)的基元模型,并通過對環(huán)境等其他因素的拓展分析找到背后隱藏的需求條件。
1.2 功能分析
根據(jù)產(chǎn)品需求基元模型,確定產(chǎn)品的總能,通過構建系統(tǒng)化、圖形化的方式建立功能結構模型,將總功能按照復雜程度由高到低逐層進行分解,構建功能分解樹,如圖3所示。對總功能的分解,即是對功能不斷細化的過程,細化到一定程度的子功能,使復雜抽象的設計問題具體化、層次化,在后續(xù)的結構映射過程中能夠更容易求解。
根據(jù)約束基元模型與功能分解樹完成子功能-結構的映射求解,再綜合考慮各子結構間的影響關系,構建出原始設計結構。
1.3 沖突求解與方案生成
(1)沖突求解
在功能-結構的映射過程中,沖突是設計人員經(jīng)常遇到的問題,如改進某一參數(shù)導致其他參數(shù)惡化、引入一個功能導致系統(tǒng)產(chǎn)生另一個有害功能等。而產(chǎn)品的概念設計核心就是解決沖突問題,在功能-結構映射過程中,如產(chǎn)生各類沖突問題,根據(jù)沖突類型利用TRIZ的沖突求解工具,快速獲得該問題對應的發(fā)明原理或原理解。
(2)方案生成
在求解沖突問題時,從 TRIZ 方法中得到的原理解僅為方向性提示,發(fā)明原理具有很強的抽象性,轉化為實際方案過程中需要設計人員擁有大量跨領域知識和跳躍性思維,因此無法直接使用。在可拓學中,創(chuàng)新方案生成的工具是可拓變換,根據(jù)拓展分析得到多個結構關系元,再結合相關知識和可拓變換,獲取多種改進方案。因此可以利用可拓變換表達發(fā)明原理中所包含的實際變換操作,直接對具體零部件進行變換,降低 TRIZ原理解的轉化難度。
1.4 方案評價與優(yōu)選
在方案生成時,若只產(chǎn)生一個概念方案,則可直接選取;若產(chǎn)生多個方案,則需要綜合考慮多屬性情況來進行量化評價。概念設計方案往往具有具體信息模糊、量化評價難等特點。可拓關聯(lián)函數(shù)用于刻畫某元素擁有某特性的程度,已被廣泛應用于優(yōu)度決策評價,因此采用可拓優(yōu)度評價法對概念方案進行評價決策,通過引入關聯(lián)函數(shù)計算指標關聯(lián)度,最終加權得到方案整體優(yōu)度,在體現(xiàn)出方案整體優(yōu)劣的同時體現(xiàn)單個指標對綜合值的關聯(lián)程度,進而為設計人員改進方案提供參考。優(yōu)度評價具體流程如圖1所示。

圖1 優(yōu)度評價流程
集成可拓學與TRIZ理論的概念設計流程,如圖2所示。
2 應用案例
以污水管道清淤機器人的創(chuàng)新概念設計為例,驗證文中所提方法的有效性。
隨著城市現(xiàn)代化的發(fā)展,管道遍布于城市與工廠的每個角落,輸送生活污水與地面雨水等,其通暢與否與人們的生活息息相關。隨著地下管網(wǎng)建設得越來越多,管道清淤變成一項任務量巨大的任務。目前我國管道清淤工作一般采用人工配合高壓水槍與吸污車進行清理,但這種方法對人工的需求較大,而且對于直徑較小的支路管道很難適用[12]。因此,采用基于可拓與TRIZ的集成創(chuàng)新設計方法,設計一款針對中小管徑的管道清淤機器人,實現(xiàn)對支路管道的清理工作。
2.1 構建需求基元進行需求分析
根據(jù)市場調研以及客戶實際需要,運用第1.1節(jié)中需求基元建立方法,可以將初始用戶需求用事元模型表示為
其中:M=
從初始需求事元模型可以看出,用戶的核心需求是管道清理以及清理過程的自主運動。但初始用戶的事元需求模型獲取的信息過于簡化,不利于接下來用戶需求到產(chǎn)品功能的映射,因此有必要對初始需求基元進一步拓展分析,結合環(huán)境、約束條件、領域知識等,進行可拓共軛分析,將機器人設計需求基元按照虛Rim、實Rre、潛Rit、顯Rap進行劃分。
2.2 功能分解與沖突識別
通過對管道清淤機器人需求基元模型分析,將管道清淤機器人總功能分解為4個分功能:清淤功能、驅動功能、支撐功能、輔助功能:將這4個分功能再次進行分解,得到如圖3所示的管道清淤機器人功能分解樹,通過分析功能模型與約束得到兩對技術沖突。

圖3 功能分解圖
沖突1:零件數(shù)量與穩(wěn)定性
由功能分析可知,管道機器人需要行走穩(wěn)定、一定的越障能力和變徑功能。管道機器人針對的是管徑較小的支路管道,管道形狀復雜,管道機器人需要具備一定的管道適應能力,能順利通過管道的過渡段和彎曲段甚至是豎直段。主動變徑方式雖然能夠在人為操控下適應管徑的變化,但結構比較復雜,成本較高,因此在不影響正常功能的前提下選擇結構相對簡單的被動變徑。常用的平行四邊形被動變徑方式在變徑時前后端都會發(fā)生變換,即使只有一端受到壓力另一端也會產(chǎn)生變化,在變徑或遇到障礙時,會導致清淤機器人部分接觸不到管壁,失去平衡,影響了機器人行進時的穩(wěn)定性。
沖突2:管道清淤機器人尺寸與所需驅動力
清淤機器人工作管道管徑較小,使得管道機器人的體積受到約束,無法選用體積較大的動力源來提供足夠的驅動力,而清淤機器人在管道中的行進和清淤工作需要較大的驅動力和扭矩。
2.3 沖突求解與方案生成
(1)沖突求解
將上述沖突轉化為TRIZ問題,選取對應的工程參數(shù)。沖突1欲改善的工程參數(shù)為36,設備復雜性;惡化的工程參數(shù)為13,穩(wěn)定性;在沖突矩陣中查詢工程參數(shù)36和13,得到4條發(fā)明原理。沖突2欲改善的工程參數(shù)為7,運動物體的體積;惡化的工程參數(shù)為10,力量;在沖突矩陣中查詢工程參數(shù)7和10,得到4條發(fā)明原理,如表1所示,對應發(fā)明原理的描述如表2所示。
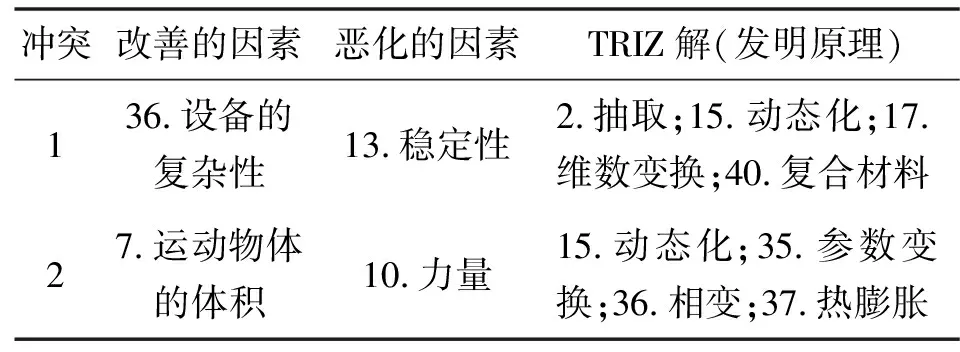
表1 沖突對應的TRIZ解

表2 對應的發(fā)明原理
(2)方案生成
上述發(fā)明原理皆為抽象性較高的啟示性文字,將其轉換為可以具體實施的原理解難度很高,因此對其包含的可拓變換進行抽取,建立基元表達模型后通過拓展變換生成具體的概念方案。
沖突1。根據(jù)初步對比分析,選擇第二條發(fā)明原理,即抽取原理作為參考解來解決變徑機構穩(wěn)定性的問題,構建變徑機構初始物元模型:
對物元M1進行分解變換T1M1={M11⊕M12}
其中M11與M12的關系元R1為
對M12進行置換變換T2M12=M′12
兩個曲柄滑塊的關系元為
T2M2=M1⊕M′2
得到變徑機構概念方案:

即將平行四邊形變徑機構改為兩個獨立的曲柄滑塊機構,增加兩個軸線方向的滑塊,并在兩個機構中間增加加固體環(huán),由彈簧連接固定環(huán)與滑塊,提供輪子足夠的支撐力。當前、后兩端有一端單獨受力時,可以實現(xiàn)一端變徑而另一端不受影響依然緊貼管壁平穩(wěn)前進。
沖突2。經(jīng)比較選取第15條發(fā)明原理,即動態(tài)化原理作為參考解,求解縮小機器人體積與增強驅動力的沖突問題。首先構建管道機器人物元模型:
依據(jù)動態(tài)性原理對物元模型進行分解變換,獲得可實現(xiàn)功能的關鍵部件物元。

根據(jù)沖突問題在縮小管道機器人體積的同時,使管道機器人具有較強的驅動力和清淤能力,對實現(xiàn)相應功能的部件物元模型實施復合變換中的補虧變換[13],形成新的部件物元:
T3M31=M31⊕M33=

T4M41=M41⊕M43=
T5M42=M41⊕M42=
得到新的關系元:
將變換得到物元模型進行結合獲得創(chuàng)新方案集,首先考慮約束條件的限制進行初步篩選,擬得到兩種可行的解決方案。
方案一:采用高壓水流與彈性簧片清淤盤結合的清淤裝置,減小清淤所需的驅動力,在機器后面使用萬向節(jié)與螺旋輪驅動裝置連接,通過螺旋驅動與支撐輪組結合的移動方式帶動清淤裝置的轉動與推進。
方案二:采用螺旋攪拌裝置與活塞式清淤泵吸入的方式清淤,從而實現(xiàn)動力源的分解,通過3組支撐腿內(nèi)置驅動輪行進,將氣動馬達固定在支撐腿內(nèi)部,保護驅動并節(jié)省空間。
2.4 方案評價
(1)確定衡量指標
根據(jù)管道清淤機器人設計需求基元,從清淤能力方面考慮,選取功能性c1作為評價特征;從工作環(huán)境方面考慮,將可靠性c2作為評價特性;從經(jīng)濟方面考慮,選取生產(chǎn)成本c3作為衡量指標。于是得到3個一級衡量指標C={c1,c2,c3} 。
(2)確定權系數(shù)
采用AHP(Analytic Hierarchy Process)法獲取各指標權重,邀請企業(yè)設計人員,相關從業(yè)人員和高校相關研究人員三類專家填寫調查問卷,采用互反性1~9標度法,對指標的相對重要程度進行打分,并構造判斷矩陣。上述一級指標的判斷矩陣H為
求得各指標權系數(shù):
ω={0.405 90,0.224 85,0.369 24}
(3)計算關聯(lián)度
將評價參數(shù)分為優(yōu)秀、良好、一般、較差四類,取值區(qū)間分別為優(yōu)秀[90,100] 、良好[80,89]、一般[70,79]、較差[60,69],構造關聯(lián)函數(shù):
k(x)=
(1)
將上述專家對方案的評分取平均值,根據(jù)式(1)計算各指標與各等級的綜合關聯(lián)度,結果如表3所示。

表3 各方案關聯(lián)度計算結果
(4)計算方案優(yōu)度
運用關聯(lián)函數(shù)加權運算等級j的綜合關聯(lián)度K(N)也就是優(yōu)度,方案綜合優(yōu)度越高,則說明該設計方案更加符合要求。計算公式為
(2)
根據(jù)式(2)計算得到兩套方案的綜合優(yōu)度分別為
K(N1)=ωk(x)=0.37,K(N2)=ωk(x)=0.26
可以看出方案一的綜合優(yōu)度更高,因此選擇方案一作為最優(yōu)方案。此方案采取兩個彈性連接的曲柄滑塊裝置,具體實際方案如圖4(a)所示,在保持較小體積的同時,提高了管道機器人變徑時的穩(wěn)定性。清淤裝置采取推進-刮削-清洗過濾的組合清淤方式,具體方案如圖4 (b)所示。

圖4 管道清淤機器人三維模型
整機采用螺旋輪式與支撐輪相結合的方式,提供旋轉前進所需的驅動力,在保持較小體積的同時將動力源進行分解和合理分布,提供足夠的驅動力,具體方案如圖4(c)所示。
3 結語
文中提出一種集成TRIZ與可拓創(chuàng)新方法的產(chǎn)品概念設計方法,將可拓理論與TRIZ理論的優(yōu)勢相結合,解決機械產(chǎn)品概念設計不同階段的矛盾問題。首先通過用戶需求基元模型與共軛分析,形式化地表示需求以及約束條件,確定產(chǎn)品的功能與矛盾問題;運用TRIZ理論提取工程參數(shù)查詢對應的原理解,通過可拓變換生成多種概念方案;最后利用優(yōu)度評價法對方案進行量化評價,選取最優(yōu)方案。規(guī)范了概念設計流程,使概念設計過程更加高效、便捷。運用該方法對小型管道清淤機器人進行創(chuàng)新設計,得到了較為理想的解決方案,驗證了該方法的可行性與有效性,該方法同樣適用于其他產(chǎn)品的創(chuàng)新設計。
集成TRIZ與可拓創(chuàng)新方法的概念設計方法可以提升概念設計過程的規(guī)范性和效率,但在沖突求解過程中仍依賴人工,故在文中研究的基礎上,利用可拓模型形式化的優(yōu)點,結合計算機智能化求解概念設計矛盾問題將是后續(xù)研究重點。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫(yī)藥現(xiàn)代遠程教育(2014年22期)2014-03-01 04:32:55
