煤礦巡檢機器人可變形行走機構設計
2024-03-13 08:34:16武澤偉
煤 2024年3期
李 洋,李 淵,武澤偉
(山西大同大學,山西 大同 037000)
煤礦發生瓦斯爆炸等災害事故之后,會造成井下機械設備以及運輸的礦車發生坍塌、翻轉,還會使巷道發生冒頂,堵塞巷道,如地面散落的巖石、煤塊的堆積和飄散的粉塵,這種復雜的非結構化環境要求巡檢機器人擁有較強的地形適應能力和越障性能。巡檢機器人能否完成巡檢和環境探測任務的關鍵在于機器人的行走機構設計,它直接影響機器人在井下的救援工作[1-2]。
因此,針對煤礦井下非結構化的環境和對巡檢工作的需求,結合行走機構越障的基本性能,基于平行四邊形機構,研究設計一種井下巡檢機器人可變性行走機構,代替工作人員進行井下的救援和勘探工作,使其在越障方面具有較高的性能。
1 可變形行走機構整體設計
1.1 常見機器人行走機構
常見的機器人行走機構形式主要有輪式、履帶式、仿生式以及復合式等,每種形式的機器人都各有其優缺點。
1.1.1 輪式行走機構
輪式行走機構是工業機器人最常用的行走機構之一,常見的輪式行走機構有二輪、四輪和六輪機構。由于這種機構結構簡單,與地面的接觸面積小,轉向靈活,在較為平坦的路面具有一定的優勢。但輪式行走機構對非結構化地形的適應能力較弱,尤其是在翻越障礙物時,翻越的高度受限于驅動輪中心與地面的距離,在障礙物較多的環境當中,行動能力嚴重受限[3]。
1.1.2 履帶式行走機構
履帶式行走機構與地面的接觸面積較大,對地面壓力較小,可以提供較大的抓地力,使其在泥濘濕滑的路面也能保持正常行走,具有較好的越野能力。常見的有雙履帶、四履帶、搖臂式履帶等機構。缺點是履帶式行走機構相對較為復雜,存在較高的能源消耗和維護成本;且該類行走機構地盤較低,容易出現卡底以及傾覆現象[4]。
1.1.3 仿生式行走機構
仿生式行走機構是模仿動物的運動原理、步態、骨骼結構,以實現更高效的機器人行走能力的行走機構。常見的仿生式行走機構有足式、鳥類、魚類、蛇類、蜘蛛類機構,優點在于它們在面對復雜的環境都有極強的適應能力,使機器人的行走更加自然、高效。這種機構在探索、農業、醫療、救援等領域具有較為廣泛的應用前景。
1.1.4 其它行走機構
除了上述常見的行走機構外,還有各種復合式行走機構。通過將不同類型的機構組合在一起,實現更靈活、多變的行走方式,使得機器人能夠在不同環境中具備更廣泛的行走能力,以適應復雜的環境,完成多樣化的任務。但此類機構存在運動協調難度較大、成本較高等問題[5-6]。
通過對上述各類行走機構的了解,綜合考慮各類機器人行走機構的優缺點和對復雜環境的適應能力,使其在越障方面更高效,設計了一種四連桿可變形機器人行走機構,用來進行井下復雜地形的日常巡檢工作。
1.2 行走機構整體機構設計
該煤礦巡檢機器人行走機構的三維模型如圖1所示。該行走機構底盤為輪式機構,分別安裝一個電機,控制輪子的運動;左右兩側是對稱的平行四邊形四連桿機構,連桿之間通過軸連接,前軸裝有一個蝸輪蝸桿減速機盒,通過控制連桿機構的運動實現兩種模式的切換。
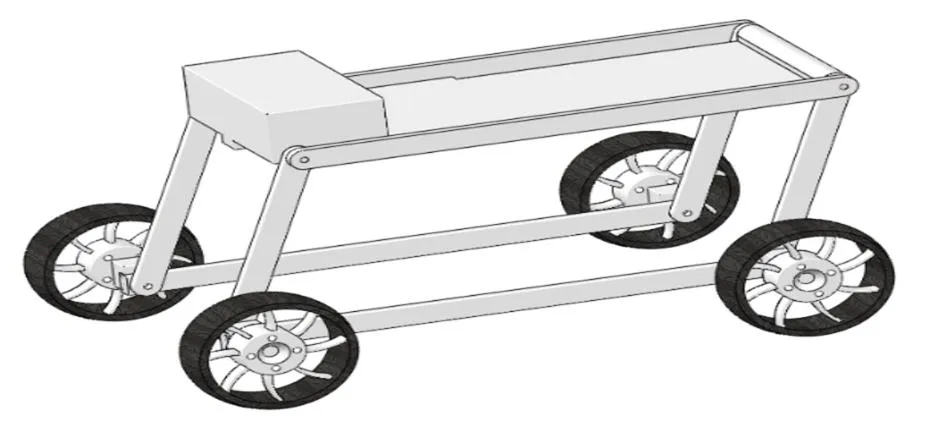
圖1 行走機構三維模型
機器人各構件參數如表1所示。
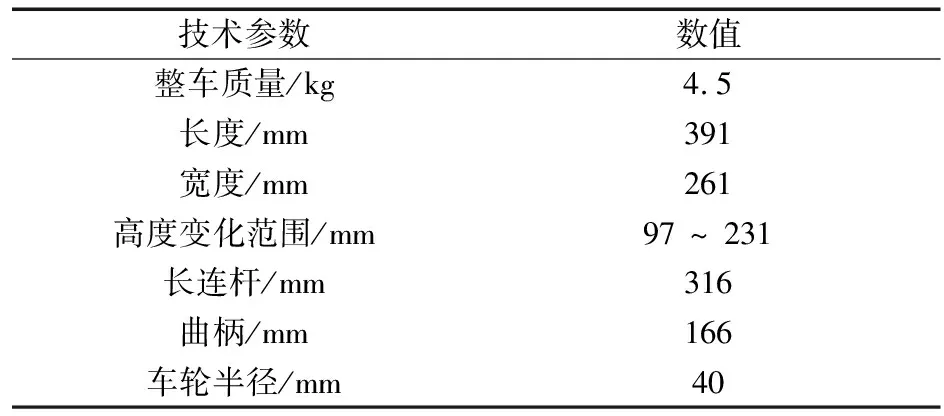
表1 構件參數
2 行走機構運動特性分析
2.1 平行四邊形連桿機構位置的不確定性
平行四邊形連桿機構在運動過程中的位置存在不確定性,即兩曲柄是否會與機架共線、運動過程中曲柄與連桿、上機架是否會發生干涉、上連桿到哪里停止運動。
如圖1所示,連桿機構的安裝位置為:上連桿平行安裝在機架的正上方,兩個曲柄平行安裝在機架與上連桿的后方,上機架相對曲柄的位置開槽,這樣就避免了干涉問題。
如圖2所示,當上連桿向后運動到與機架重合時即停止運動,為上連桿與機架重合時的極限位置,此時不會與機架共線,傳動角始終大于0°,即不會發生自鎖和死點現象。

圖2 重合極限位置
由圖1可知,平行四邊形連桿機構的主動件為前曲柄,共包含4個構件,其中1個構件為固定機架,剩余3個活動構件,共包含4個低副,0個高副,由公式(1)可知:
F=3n-2PL-PH=3×3-2×0-1=1
(1)
式中:F為自由度;n為構件,PL為低副,PH為高副。
自由度F為1,與主動件數量相等。
綜上,可知機構有確定的運動。
2.2 越障性能分析
2.2.1 通過障礙物路段
當中途有煤塊等障礙物時,平行四邊形連桿機構在電機的驅動下,左右曲柄帶動整體向前擺動,使曲柄與連桿之間垂直成矩形,可直接通過障礙物,無需轉彎、攀爬,節省了時間,如圖3所示。
圖3 通過障礙物示意
根據車輪的半徑以及曲柄的長度,計算出該行走機構能通過障礙物的最高距離為181 mm.
建立如圖4所示,以行走機構前輪軸心O為原點的坐標系XOY,對行走機構整體進行受力分析,可得各構件所受的力對O點的力矩平衡方程,如下式:
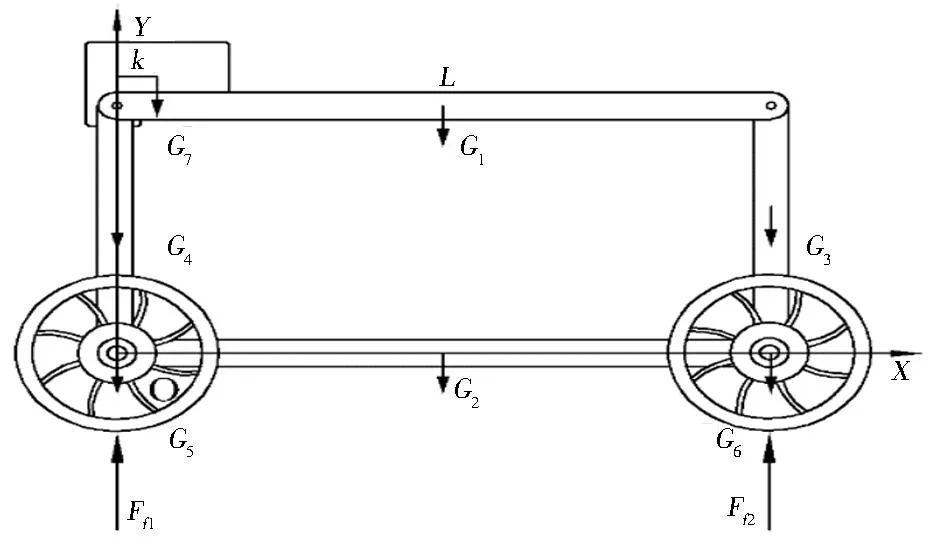
圖4 受力分析圖
Ff1+Ff2-G1-G2-G3-G4-G5-G6=0
(2)
(3)
式中:G為各構件的重力,N;Ff1和Ff2為地面對構件整體的臨界靜摩擦力,N;k為電機盒到O的距離,mm;L為連桿重心到O的距離,mm.
2.2.2 通過狹縫路段
路況較為平坦時,平行四邊形連桿機構在電機的驅動下,左右曲柄帶動整體向后擺動,在上連桿與機架連桿重合時停止運動,機身整體高度大幅降低,可快速通過狹窄的縫隙,如圖5所示。
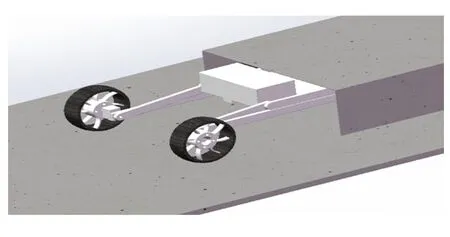
圖5 通過狹縫示意
圖6為該行走機構通過狹縫時的機構簡圖。
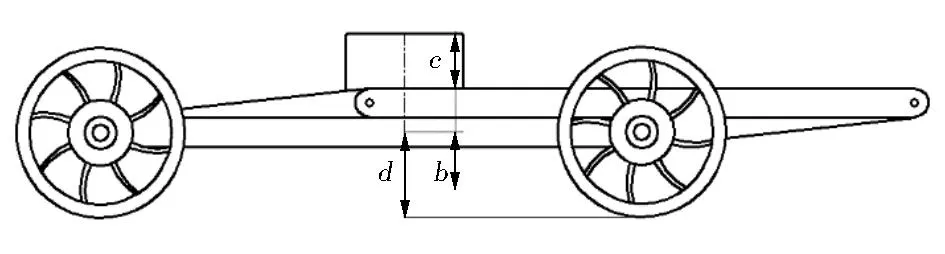
圖6 通過狹縫結構簡圖
能通過的最小狹縫高度應為:
b+c+d=126 mm
(4)
式中:b為3/2長連桿高度,mm;c為電機盒在長連桿之上的高度,mm;d為車輪半徑,mm.
3 機器人傾覆穩定性分析
機器人的傾覆穩定性分析是為了確保其是否可以在不同環境和任務中保持穩定和平衡的重要依據[7]。通過評估機器人在不同地形上的穩定性,可以確保其在各種實際應用場景中不會傾覆或失去平衡。
在此行走機構中,為了適應井下復雜路況,隨著平行四邊形連桿機構中主動曲柄擺角的變化,機器人行走機構的位姿會隨之發生變化,機器人整體的質心分布不斷變化,可能會存在質心偏離中心平面的情況,從而產生機器人傾覆的情況。因此,需要對機器人的質心進行求解。
如圖7所示,為任意擺角時的機構簡圖,建立以機器人前輪軸心O0為坐標原點的直角坐標系xO0y.
由圖7可得機器人質心O的坐標:
(5)
式中:O為各構件質心;b和k該機構的曲柄和連桿軸心之間的長度,mm;c為電機盒質心O5到前輪軸心O0的距離,mm;d為機體質心O1到前輪軸心O0的距離,mm;α、β、γ分別為機體質心O1、電機盒質心O5、曲柄質心O2與x軸的夾角,°.
將(5)轉化后,可得公式(6)。由公式(6)可知,當曲柄向后擺動時,機器人質心O的位置是在以公式(7)為圓心,以公式(8)為半徑的圓上,同時隨曲柄擺角的變化而變化。但由于曲柄只在0°~90°之間變化,所以機器人的質心只在部分第一象限內的圓弧上變化。
(6)
(7)
(8)
4 結 語
1) 通過對機器人行走機構類型和特點進行對比分析,結合井下復雜環境設計了一種基于平行四邊形機構的井下巡檢機器人行走機構。
2) 用Solidworks軟件建立機器人三維模型,并在障礙物和狹縫兩種路況下,對機器人進行仿真模擬和分析,得出機器人通過兩種路況的極限高度分別為181 mm和126 mm,結果表明機器人具有更好的越障性能。
3) 通過對機器人的質心位置進行計算分析,結果表明機器人的在變換模式的過程中不會發生傾覆情況,具有較好的穩定性。