蛇形空間機(jī)械臂單個2-DOF關(guān)節(jié)的運(yùn)動學(xué)標(biāo)定
2024-03-14 10:23:30宋國慶趙成浩袁俊杰張忠海何廣平
機(jī)床與液壓 2024年3期
關(guān)鍵詞:模型
宋國慶,趙成浩,袁俊杰,張忠海,何廣平
(1.北方工業(yè)大學(xué)機(jī)械與材料工程學(xué)院,北京 100144;2.北京航天測控技術(shù)有限公司,北京 100041)
0 前言
近年來,超冗余蛇形空間機(jī)器人具有高度的可操作性、靈活性和良好的動力學(xué)性能,在學(xué)術(shù)界和工業(yè)界引起了極大的興趣。比較傳統(tǒng)機(jī)器人,超冗余蛇形空間機(jī)器人具有眾多的自由度,能夠在狹小的空間中靈巧操作。因此,它們在檢測、維護(hù)、維修和救援等任務(wù)中擁有巨大的潛力,如核工業(yè)[1]、航空發(fā)動機(jī)維修[2]、空間站維護(hù)維修[3]、地震救援[4-5]等。
精度是描述機(jī)器人工作性能的關(guān)鍵性指標(biāo),隨著高價值基礎(chǔ)設(shè)施對高精度檢測需求的日益增長,對蛇形空間機(jī)械臂的末端位置精度提出了更高的要求。近年來,國內(nèi)外的專家和學(xué)者針對這一問題分別從結(jié)構(gòu)設(shè)計[6-7]、運(yùn)動學(xué)模型[8]、動力學(xué)模型[9-10]、控制系統(tǒng)設(shè)計[11]和軌跡規(guī)劃[12-14]等方面進(jìn)行了分析,雖然已有大量提高蛇形臂末端定位精度的研究,但關(guān)于原始誤差對于蛇形臂精度影響的文獻(xiàn)較少。LIN等[15]針對這一問題,分析了蛇形臂關(guān)節(jié)平面繩索孔的位置誤差和繩索長度誤差對蛇形臂末端位置精度的影響,但是并未指出其余結(jié)構(gòu)參數(shù)的誤差對于末端執(zhí)行器精度的影響。從這一問題出發(fā),蛇形空間機(jī)械臂的末端位置精度可以通過運(yùn)動學(xué)標(biāo)定進(jìn)行提高,一般來講可以分為以下4步[16]:(1)針對研究目標(biāo),建立包含所有誤差源的誤差模型;(2)通過靈敏度分析,辨識出對機(jī)器人末端執(zhí)行器影響較大的誤差源;(3)利用內(nèi)部傳感器或外部測量裝置對機(jī)器人的末端位姿進(jìn)行測量;(4)運(yùn)用誤差辨識原理,對機(jī)器人的控制模型進(jìn)行修正。
蛇形空間機(jī)器人的單個2-DOF關(guān)節(jié)為柔性繩索驅(qū)動的并聯(lián)機(jī)構(gòu)。在并聯(lián)機(jī)構(gòu)的誤差分析中,誤差建模是誤差分析和運(yùn)動學(xué)標(biāo)定的基礎(chǔ),通常來說,誤差建模方法分為以下3種:(1)矩陣全微分理論[17-18];(2)閉環(huán)矢量法[19-20];(3)旋量理論[21]。然后,對已建立好的誤差模型進(jìn)行靈敏度分析,蒙特卡洛法[22]和靈敏度系數(shù)法[23]是兩種常用的方法。比較蒙特卡洛法,靈敏度系數(shù)法具有更加清晰的數(shù)學(xué)意義,能夠在統(tǒng)計意義上反映出蛇形臂結(jié)構(gòu)誤差的標(biāo)準(zhǔn)差對于末端精度的影響[24],為機(jī)械加工的公差設(shè)計提供理論指導(dǎo)。最后,通過運(yùn)動學(xué)標(biāo)定[25-27],對控制器中的名義運(yùn)動學(xué)模型進(jìn)行修正。
上述文獻(xiàn)表明,在大多數(shù)關(guān)于并聯(lián)機(jī)器人誤差分析的研究中,研究的對象通常是基于剛性關(guān)節(jié)驅(qū)動的具有確定輸入的并聯(lián)機(jī)器人。對于蛇形空間機(jī)械臂這一類柔性繩索驅(qū)動的具有超確定輸入的串/并聯(lián)機(jī)器人的研究中,由于約束的存在,其精度分析問題變得較為復(fù)雜。本文作者以提高柔性繩索驅(qū)動的蛇形空間機(jī)械臂末端位置精度為目標(biāo),對單個2-DOF關(guān)節(jié)進(jìn)行分析。首先,通過矩陣全微分理論建立2-DOF關(guān)節(jié)的誤差模型,并在此基礎(chǔ)上,依據(jù)全局靈敏度指標(biāo)指導(dǎo)機(jī)械臂的加工和裝配;最后,通過正則化的方法對2-DOF關(guān)節(jié)進(jìn)行運(yùn)動學(xué)標(biāo)定,進(jìn)一步提高機(jī)械臂的末端位置精度。
1 蛇形臂空間機(jī)器人介紹
蛇形臂空間機(jī)器人具有22個自由度,包括直線導(dǎo)軌滑臺1個自由度、末端執(zhí)行器1個自由度,機(jī)械臂由10個模塊化2-DOF關(guān)節(jié)串聯(lián),共20個自由度。蛇形臂機(jī)器人三維模型如圖1所示。由繩索驅(qū)動機(jī)械臂關(guān)節(jié)運(yùn)動,控制器和驅(qū)動器被放置在機(jī)器人的上部,繩索穿過圓盤和帶有繩索導(dǎo)向管道的繩索導(dǎo)向部件,進(jìn)入驅(qū)動系統(tǒng)。繩索導(dǎo)向部件整體為3D增材制造技術(shù)加工制作,通過法蘭連接到機(jī)械臂。末端執(zhí)行器具有360°旋轉(zhuǎn)功能和快裝接口,可安裝夾爪等模塊化工具集。為提高機(jī)器人的負(fù)載能力和末端執(zhí)行器的精度,機(jī)器人關(guān)節(jié)的直徑/長度的比例設(shè)計得盡可能大[28]。且根部關(guān)節(jié)為耦合驅(qū)動,頭部關(guān)節(jié)為解耦合驅(qū)動,通過宏/微操作策略,可以對機(jī)械臂的末端位置誤差進(jìn)行補(bǔ)償。

圖1 蛇形臂機(jī)器人三維模型
機(jī)械臂由結(jié)構(gòu)完全相同的模塊化關(guān)節(jié)組成,為提高機(jī)械臂的位置精度,不失一般性,對機(jī)械臂單個2-DOF關(guān)節(jié)進(jìn)行分析。圖2(a)展示了單個關(guān)節(jié)的虛擬樣機(jī)。共有驅(qū)動繩索運(yùn)動的3個輸入自由度和2個輸出自由度,驅(qū)動方式為冗余驅(qū)動。模型可簡化為圖2(b)所示的機(jī)構(gòu)簡圖,該2-DOF關(guān)節(jié)由1個靜平臺、1個動平臺、1個萬向節(jié)、1根連桿以及3根結(jié)構(gòu)和性能完全相同的繩索組成。Ai為繩索與靜平臺的交點(diǎn),繩索的末端點(diǎn)Bi連接到動平臺,3根繩索與動(靜)平臺的連接處呈120°均勻分布,O1分別被投影到動、靜平臺的點(diǎn)O0和點(diǎn)O2處,O0和O2分別為動、靜平臺的圓心。為了更好地描述2-DOF關(guān)節(jié)的運(yùn)動關(guān)系,以靜平臺點(diǎn)O0建立全局坐標(biāo)系O0-x0y0z0,z0軸方向豎直向上,x0軸指向A1,y0軸由右手定則確定。類似地,以點(diǎn)O2為圓心建立動平臺的坐標(biāo)系O2-x2y2z2,z2垂直于動平臺豎直向上,x2指向點(diǎn)B1,y2的方向由右手定則確立。將O2-x2y2z2坐標(biāo)系向上平移至點(diǎn)O′,即可得到坐標(biāo)系O′-x′y′z′。

圖2 蛇形臂單個2-DOF關(guān)節(jié)
(1)2-DOF關(guān)節(jié)逆向運(yùn)動學(xué)
對蛇形臂機(jī)器人2-DOF關(guān)節(jié)進(jìn)行分析,機(jī)械臂的逆運(yùn)動學(xué)分別包含操作空間至位形空間和位形空間至驅(qū)動空間的兩重映射關(guān)系。以萬向節(jié)十字交叉軸中心點(diǎn)O1為原點(diǎn),建立坐標(biāo)系O1-x1y1z1,x1軸平行于x0軸,y1軸平行于y2軸,z1軸與h2共線,則O0到O1、O1到O′的坐標(biāo)變換關(guān)系可以表示為
O0TO1=T(0,0,h1)R(Y,β)
O1TO′=R(X,α)T(0,0,h2+h3)
(1)
T()和R()分別表示平移和旋轉(zhuǎn)齊次變換矩陣。則點(diǎn)O0到點(diǎn)O′的齊次坐標(biāo)變換矩陣可以表示為
O0TO′=O0TO1O1TO′
(2)
設(shè)cα=cosα、sα=sinα、sβ=sinβ,則2-DOF關(guān)節(jié)動平臺點(diǎn)O′在全局坐標(biāo)系中的坐標(biāo)可以表示為
PO′=[(h2+h3)cαsβ,-(h2+h3)sα,h1+(h2+h3)cαcβ]T
(3)
由于2-DOF蛇形機(jī)器人關(guān)節(jié)的驅(qū)動方式為冗余驅(qū)動,且x、y、z坐標(biāo)具有耦合性,由式(3)可知,當(dāng)末端執(zhí)行器位置坐標(biāo)已知時,取x坐標(biāo)和y坐標(biāo)可以反解得到關(guān)節(jié)角α和β。
(4)
繩索的長度只在單個關(guān)節(jié)的動平臺和靜平臺之間發(fā)生變化,而連桿內(nèi)部的繩索長度保持不變。因此,驅(qū)動空間到位形空間的運(yùn)動學(xué)僅涉及單個關(guān)節(jié)動、靜平臺之間的區(qū)域。根據(jù)各點(diǎn)之間的映射關(guān)系,可以求得點(diǎn)O0到點(diǎn)O2的齊次變換為
(5)
繩索孔在基坐標(biāo)系O0-x0y0z0中的位置坐標(biāo)可以表示為
ai=(rcφi,rsφi,0,1)
(6)
繩索孔在動坐標(biāo)系O2-x2y2z2中的位置坐標(biāo)可以表示為
bi=(rcφi,rsφi,0,1)
(7)
其中:r為動/靜平臺3個繩索孔距離中心點(diǎn)的距離;φi(i=1,2,3)表示動/靜平臺上的第i個繩索孔和中心點(diǎn)連接線分別與x0和x2軸之間的夾角,呈120°均勻分布。故第i根繩索的長度為
(8)
聯(lián)立式(4)和式(8),可以得到蛇形機(jī)器人驅(qū)動空間到工作空間單個關(guān)節(jié)的運(yùn)動學(xué)逆解。
(2)2-DOF關(guān)節(jié)正向運(yùn)動學(xué)
由于單個2-DOF關(guān)節(jié)為冗余驅(qū)動的并聯(lián)機(jī)構(gòu),其正向運(yùn)動學(xué)較難求解,且由式(8)可知,繩索長度到末端執(zhí)行器位置坐標(biāo)的映射關(guān)系為非線性關(guān)系,通過數(shù)值優(yōu)化的方法進(jìn)行迭代求解。根據(jù)式(8)建立的數(shù)學(xué)模型,優(yōu)化模型的目標(biāo)函數(shù)可以表示為
(9)
其中:Li(Θ)由式(8)確定,Θ=(α,β)為優(yōu)化變量。對于給定任意一組繩索長度l1、l2、l3,可通過數(shù)值迭代的方法,近似求解對應(yīng)的2-DOF關(guān)節(jié)角變量Θ。文中基于梯度法進(jìn)行求解,其迭代公式可以表示為
Θk+1=Θk+αkpk
(10)
其中:Θk為第k次迭代的優(yōu)化變量值;αk表示優(yōu)化步長;pk表示優(yōu)化方向。基于梯度法求解末端姿態(tài),優(yōu)化方向為負(fù)梯度方向,即
(11)
對于式(9)表示的非線性二次型目標(biāo)函數(shù),利用Wolfe條件確定優(yōu)化步長αk時,通常需要進(jìn)行多次迭代,以選擇適當(dāng)?shù)牟介L系數(shù)αk。采用如下自適應(yīng)機(jī)制
(12)
其中:1.2和0.2為變步長系數(shù)。通過以上的優(yōu)化迭代算法,能夠?qū)︱?qū)動空間到位形空間的正運(yùn)動學(xué)進(jìn)行求解。聯(lián)立式(3),完成整個正向運(yùn)動學(xué)的迭代求解。
2 蛇形臂2-DOF關(guān)節(jié)誤差分析
2.1 誤差建模
繩索驅(qū)動的單個2-DOF關(guān)節(jié)的運(yùn)動學(xué)建模涉及多個空間的映射關(guān)系,且驅(qū)動方式的冗余特點(diǎn)給機(jī)械臂誤差模型分析帶來較大困難。對單個關(guān)節(jié)進(jìn)行誤差建模,模型可簡化為包含所有誤差源的2-DOF關(guān)節(jié),示意圖如圖3所示。根據(jù)動平臺和靜平臺之間的運(yùn)動學(xué)映射,驅(qū)動空間到位形空間的逆運(yùn)動學(xué)模型可以重建為

圖3 蛇形臂2-DOF關(guān)節(jié)幾何結(jié)構(gòu)誤差示意
li=[(ri,1cφi,1cβ-ri,2cφi,2+h2cαsβ+ri,1sφi,1sαsβ)2+(ri,1sφi,1cα-h2sα-r2sφi,2)2+(h1-ri,1cφi,1sβ+h2cαcβ+ri,1sφi,1cβsα)2]1/2
(13)
聯(lián)立式(4)和式(13),可以得到該2-DOF關(guān)節(jié)驅(qū)動空間到工作空間的逆運(yùn)動學(xué)模型,將其簡寫為
fi(ri,1,ri,2,h1,h2,h3,φi,1,φi,2,x,y,li)=0
(14)
其中:ri,1、ri,2、h1、h2、h3、φi,1、φi,2均為已知的結(jié)構(gòu)參數(shù);li為輸入?yún)?shù);x、y為2-DOF關(guān)節(jié)末端執(zhí)行器的輸出位置參數(shù)。對式(14)的所有變量進(jìn)行微分得
(15)
其中:Pj(j=1,2)為2-DOF關(guān)節(jié)的位置坐標(biāo)x和y;qk(k=1,2,…,18)為不包含末端位置的18個結(jié)構(gòu)參數(shù)。聯(lián)立式(14)和式(15),將誤差模型整理成矩陣形式,可以表示為
Jadea=Jmdqm
(16)
整理式(16),并用結(jié)構(gòu)誤差和末端執(zhí)行器位置誤差的有限小量Δqm和Δea分別替換dqm和dea,可以得到Δqm和Δea之間的映射關(guān)系。
Δea=JeΔqm
(17)

2.2 誤差模型驗證
為了驗證結(jié)構(gòu)誤差模型的正確性,提出一種誤差模型的驗證方法。該方法對已經(jīng)建立的正確的運(yùn)動學(xué)模型,引入幾何參數(shù)誤差Δqm(m=1,2,…,18),計算末端執(zhí)行器的位置偏移量,與該結(jié)構(gòu)誤差Δqm在誤差模型中計算得到的末端位置誤差進(jìn)行比較,若結(jié)果相同,則誤差模型正確;反之,則誤差模型錯誤。幾何誤差模型驗證流程如圖4所示。

圖4 幾何誤差模型驗證流程
具體步驟為:
(1)從表1中隨機(jī)選取2-DOF關(guān)節(jié)的任一位置,位置的選取要符合2-DOF關(guān)節(jié)工作空間的要求。

表1 工作空間內(nèi)的末端位置
(2)從表2中選擇任一給定誤差,為了更直觀體現(xiàn)幾何結(jié)構(gòu)誤差對于末端姿態(tài)的影響,誤差大小的選取是隨機(jī)的且通常要比設(shè)計誤差大一些。
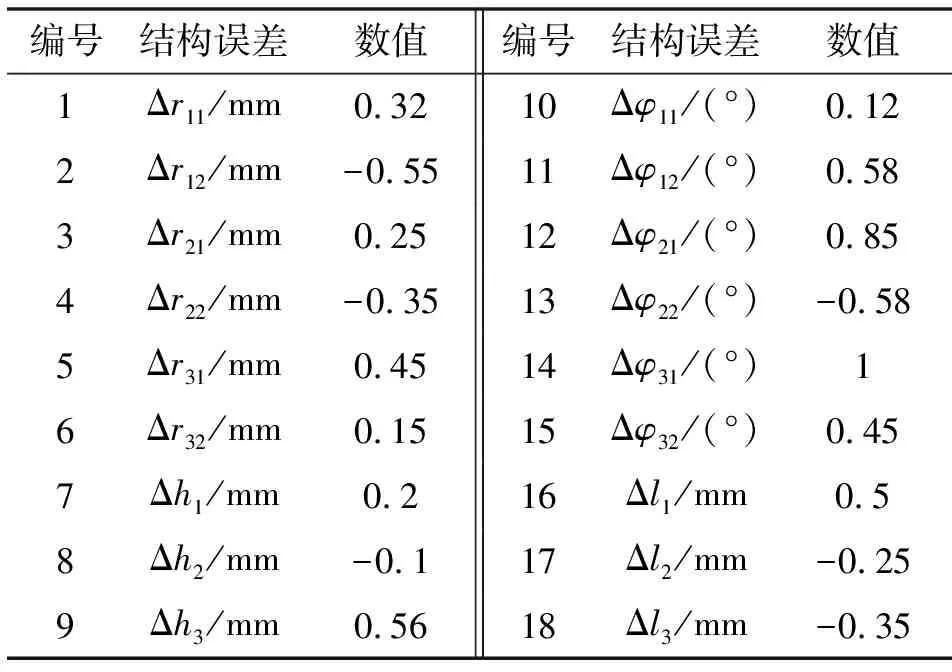
表2 給定2-DOF關(guān)節(jié)的幾何誤差參數(shù)
(3)聯(lián)立式(4)和式(8),計算驅(qū)動繩索的長度li。

(5)計算在該位置下的誤差影響系數(shù)矩陣Je。

(7)比較步驟(4)和步驟(6)的計算結(jié)果。
(8)返回步驟(2),選擇另一誤差重復(fù)以上步驟。
(9)返回步驟(1),選擇另一位置重復(fù)以上步驟。


圖5 誤差模型與運(yùn)動學(xué)模型求解誤差對照
3 蛇形臂2-DOF關(guān)節(jié)誤差靈敏度分析
3.1 誤差靈敏度指標(biāo)
基于建立的誤差映射模型對結(jié)構(gòu)誤差進(jìn)行靈敏度分析,能夠評估所有結(jié)構(gòu)誤差對于末端姿態(tài)的影響程度的大小。此節(jié)在統(tǒng)計意義上,定義了能夠評價各個結(jié)構(gòu)誤差對于動平臺位置誤差影響的靈敏度指標(biāo)。假定結(jié)構(gòu)誤差服從均值為零的正態(tài)分布,可以建立單個2-DOF關(guān)節(jié)的誤差模型為
(18)
式中:Δqm,i表示單個2-DOF關(guān)節(jié)第i條支鏈Δqm中的第m個元素;Je,i,m為系數(shù)矩陣Je中第i行第m列元素。則Δea的標(biāo)準(zhǔn)差可以表示為
(19)
其中:σ(Δea)可以表示由單位標(biāo)準(zhǔn)差Δqm引起的單位標(biāo)準(zhǔn)差Δea的偏離程度,因此,可以定義ωm為Δea的局部靈敏度。
(20)
由于Je,i,m與位置坐標(biāo)有關(guān),為了評價各個結(jié)構(gòu)誤差對于指定工作空間的敏感程度,定義Je,i,k在指定工作空間V中的均值um為全局靈敏度,作為評估Δqm,k對于末端位置精度的影響系數(shù)。
(21)
3.2 誤差靈敏度分析
基于式(20)和式(21)建立的誤差靈敏度模型,對蛇形臂單個2-DOF關(guān)節(jié)進(jìn)行靈敏度分析,機(jī)械臂的關(guān)鍵設(shè)計參數(shù)如表3所示,根據(jù)蛇形空間機(jī)械臂的設(shè)計要求,單個2-DOF關(guān)節(jié)對應(yīng)的x、y的工作空間為(-24,24) mm。

表3 2-DOF關(guān)節(jié)主要設(shè)計參數(shù)
計算結(jié)果如圖6所示。可知:末端定位精度對于關(guān)節(jié)長度h1最為敏感,其次是繩索長度l1、l2、l3和關(guān)節(jié)長度h2、h3,繩索孔的角度φi,j對于2-DOF機(jī)械臂的影響最小。因此在設(shè)計和裝配階段,應(yīng)重點(diǎn)保障關(guān)節(jié)長度的設(shè)計和裝配誤差,其次應(yīng)注意繩索孔位置誤差對于末端精度的影響,繩索的長度可以通過控制進(jìn)行補(bǔ)償。因此,在公差設(shè)計時,如果已知Δqm引起的Δea的標(biāo)準(zhǔn)差大小,則可以計算出Δqm的公差。例如,如果由σ(Δea)引起的末端執(zhí)行器誤差被限制在26 μm,那么靜平臺的關(guān)節(jié)長度h1的公差應(yīng)在±(3×26/1.477) μm范圍內(nèi),也就是±52.81 μm,依次可以計算出所有幾何參數(shù)的公差大小。

圖6 靈敏度條形圖
4 蛇形臂2-DOF關(guān)節(jié)運(yùn)動學(xué)標(biāo)定
由于存在運(yùn)動學(xué)誤差,導(dǎo)致末端執(zhí)行器的實(shí)際運(yùn)動與名義運(yùn)動有所不同。在此節(jié)中,提出一種正則化的參數(shù)辨識方法,通過最小二乘法進(jìn)行數(shù)值迭代,獲得結(jié)構(gòu)參數(shù)的幾何誤差,通過誤差辨識,補(bǔ)償和修正控制器中的名義運(yùn)動學(xué)模型。
4.1 誤差辨識原理
根據(jù)式(17)可知,對18個結(jié)構(gòu)誤差進(jìn)行辨識,至少需要9組末端執(zhí)行器的位置坐標(biāo),誤差模型可以表示為
(22)

(23)
其中:I為單位矩陣;α為正則化參數(shù),可通過廣義交叉驗證(GCV)和遺傳算法(GA)進(jìn)行求解。由于式(23)為非線性函數(shù),難以得到解析解,因此,可以采用Gauss-Newton數(shù)值迭代進(jìn)行求解,具體流程如圖7所示。目標(biāo)函數(shù)為
(24)

圖7 數(shù)值迭代法求解幾何誤差
其中:(Xm,i,Ym,i)為第i組末端位置的測量值。通過對名義尺寸進(jìn)行迭代修正,逐漸逼近真實(shí)加工尺寸,則數(shù)值迭代方法可以表示為
德國羅森伯格,一家擁有60年歷史的、擁有頂尖技術(shù)優(yōu)勢的無線射頻和光通信技術(shù)制造商,其在移動通信、汽車電子、測試計量以及光傳輸?shù)阮I(lǐng)域以領(lǐng)先的技術(shù)優(yōu)勢、先進(jìn)的生產(chǎn)工藝和嚴(yán)苛的品質(zhì)保證而享譽(yù)世界。羅森伯格FAKRA?、HSD?的信號傳輸技術(shù)作為行業(yè)標(biāo)準(zhǔn)被毆美日系全線車型上廣泛采用;在HVR?高電壓和大電流的傳送技術(shù)上具有屏蔽性好、穩(wěn)定性高的技術(shù)優(yōu)勢;全新MTD?技術(shù),完美詮釋了車載以太網(wǎng)解決方案。
(25)

4.2 數(shù)值仿真


圖8 運(yùn)動學(xué)標(biāo)定仿真流程


表4 理想末端位置和標(biāo)定前后的末端位置 單位:mm Tab.4 Ideal end positions and end positions before and after calibrations Unit:mm

圖9 運(yùn)動學(xué)標(biāo)定前、后位置誤差曲線

圖10 運(yùn)動學(xué)標(biāo)定實(shí)驗裝置
5 實(shí)驗
在此節(jié)中,提出一種適用于蛇形空間機(jī)械臂的單個2-DOF關(guān)節(jié)的運(yùn)動學(xué)標(biāo)定方法[29],進(jìn)一步驗證標(biāo)定算法的有效性。如圖 10所示,通過在關(guān)節(jié)末端安裝激光發(fā)射器,對末端發(fā)射的激光點(diǎn)的位置進(jìn)行采集和處理,得到末端位置坐標(biāo)。與理想末端位置坐標(biāo)進(jìn)行對比,能夠得到機(jī)器人的末端位置誤差。該方法不需要對基準(zhǔn)進(jìn)行標(biāo)定,具有節(jié)約時間、成本低、計算簡單和易于實(shí)現(xiàn)的特點(diǎn)。
(1)在2-DOF關(guān)節(jié)的末端安裝激光發(fā)射器,確保激光發(fā)射器位于末端關(guān)節(jié)的中心位置且與動平臺保持豎直。
(2)在2-DOF關(guān)節(jié)的正上方水平放置網(wǎng)格板,用于接收激光筆發(fā)射的激光信號,并通過幾何方法對末端執(zhí)行器的位置信息進(jìn)行放大。
(3)經(jīng)過相機(jī)采集放大后的末端位置信息,并通過ScanIt軟件對坐標(biāo)點(diǎn)的位置進(jìn)行提取。通過幾何計算機(jī)械臂的末端位置坐標(biāo)。網(wǎng)格板的誤差為0.1 mm,末端執(zhí)行器的測量誤差為0.012 mm。
隨機(jī)生成20組末端位置,對運(yùn)動學(xué)標(biāo)定算法進(jìn)行驗證,運(yùn)動學(xué)標(biāo)定的實(shí)驗結(jié)果如圖 11所示。運(yùn)動學(xué)標(biāo)定實(shí)驗結(jié)果與仿真結(jié)果相似,從圖11可以看出:經(jīng)過運(yùn)動學(xué)標(biāo)定后的最大誤差由2.19 mm降低至1.12 mm,末端位置精度得到明顯提高。在隨機(jī)選取的20組末端姿態(tài)中,標(biāo)定前x方向和y方向的平均誤差為0.23 mm和1.67 mm,標(biāo)定后的平均誤差為0.02 mm和0.3 mm,末端位置精度得到顯著提高,證明所提出的運(yùn)動學(xué)標(biāo)定算法是有效的。考慮到繩索只能受拉的特點(diǎn)和繩索彈性變形的影響,末端的位置誤差可以通過進(jìn)一步調(diào)節(jié)繩索的拉力進(jìn)行調(diào)整。

圖11 給定位姿下運(yùn)動學(xué)標(biāo)定前后的實(shí)驗結(jié)果
6 結(jié)論
針對高精度超冗余蛇形空間機(jī)械臂的研制,對單個2-DOF關(guān)節(jié)的幾何參數(shù)誤差進(jìn)行分析,指導(dǎo)機(jī)械臂零部件的加工和裝配,從加工和裝配上對位置誤差進(jìn)行控制,并通過運(yùn)動學(xué)標(biāo)定,進(jìn)一步提高末端執(zhí)行器的位置精度。主要工作如下:
(1) 建立了基于柔性繩索驅(qū)動的蛇形臂空間機(jī)器人單個關(guān)節(jié)的誤差映射模型,能夠準(zhǔn)確反映結(jié)構(gòu)誤差的傳遞關(guān)系。
(2) 基于統(tǒng)計意義下對蛇形空間機(jī)械臂的單個2-DOF關(guān)節(jié)的幾何結(jié)構(gòu)誤差進(jìn)行靈敏度分析,確定了6個主要幾何結(jié)構(gòu)誤差對機(jī)械臂末端位置精度影響最大,并根據(jù)全局靈敏度指標(biāo)設(shè)計各零部件的幾何公差,指導(dǎo)蛇形臂的加工和裝配。
(3) 提出一種運(yùn)動學(xué)標(biāo)定方法,通過對幾何誤差進(jìn)行誤差辨識,補(bǔ)償名義運(yùn)動學(xué)中的幾何結(jié)構(gòu)參數(shù)。結(jié)果表明,經(jīng)過運(yùn)動學(xué)標(biāo)定后的末端位置精度得到明顯提高,補(bǔ)償后的末端位置的綜合誤差精度至少提高50%。
在未來工作中,針對提高蛇形空間機(jī)械臂位置精度的研究,將進(jìn)一步研究包含整個蛇形臂的運(yùn)動學(xué)標(biāo)定和考慮繩索彈性變形對末端定位精度的影響。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
