基于伺服運(yùn)動(dòng)系統(tǒng)的三步非線性控制方法
2024-03-16 10:11:06高興泉
科學(xué)技術(shù)創(chuàng)新 2024年6期
高興泉,孫 浩,楊 昊
(1.吉林工業(yè)職業(yè)技術(shù)學(xué)院 信息工程學(xué)院,吉林 吉林;2.吉林化工學(xué)院 信息與控制工程學(xué)院,吉林 吉林)
引言
伺服運(yùn)動(dòng)系統(tǒng)是一種自動(dòng)控制系統(tǒng),它能夠使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入信號(hào)發(fā)生變化。伺服運(yùn)動(dòng)系統(tǒng)具有響應(yīng)速度快、準(zhǔn)確性高、穩(wěn)定性強(qiáng)、能耗低等特點(diǎn),被廣泛應(yīng)用于航空航天、太陽能、數(shù)控機(jī)床、機(jī)器人等領(lǐng)域中[1-4]。由于伺服系統(tǒng)的非線性模型在干擾因素的影響下,其控制精度使得難以滿足期望值,大幅降低了系統(tǒng)的工作效率。因此,學(xué)者們提出了多種控制策略以改善系統(tǒng)的動(dòng)態(tài)特性[5]。
近年來國(guó)內(nèi)外學(xué)者提出多種控制方法,馬[6]采用了模糊冪指數(shù)趨近規(guī)則,針對(duì)伺服系統(tǒng)設(shè)計(jì)出一種全新的控制系統(tǒng),旨在有效降低外部擾動(dòng)對(duì)系統(tǒng)造成的位移偏差;DU[7]等采用了模糊PID對(duì)磨削機(jī)床伺服電機(jī)進(jìn)行控制研究,實(shí)現(xiàn)了對(duì)系統(tǒng)動(dòng)態(tài)行為的精確控制;chuei[8]根據(jù)伺服運(yùn)動(dòng)系統(tǒng)的二階智能滑模控制原理,設(shè)計(jì)出一種基于魯棒控制器的控制系統(tǒng),它能夠有效提升伺服系統(tǒng)的動(dòng)態(tài)響應(yīng)性能;H.R[9]根據(jù)系統(tǒng)的狀態(tài)和外部干擾的情況,設(shè)計(jì)一種控制器會(huì)動(dòng)態(tài)地調(diào)整系統(tǒng)的參數(shù)或控制信號(hào),以最小化系統(tǒng)狀態(tài)與目標(biāo)狀態(tài)之間的誤差;WAN[10]根據(jù)系統(tǒng)的狀態(tài)和外部干擾的情況,提出了控制器會(huì)動(dòng)態(tài)地調(diào)整系統(tǒng)的參數(shù)或控制信號(hào);吳[11]提出了一種基于變結(jié)構(gòu)控制(VSC)的控制方法,它對(duì)系統(tǒng)的各種變化以及外部干擾等不確定因素展現(xiàn)出強(qiáng)大的魯棒性;為了解決局部位置跟蹤控制難題,劉[12]設(shè)計(jì)了一種由三環(huán)控制和內(nèi)模控制組成的兩步控制器,該方法還可以有效地抑制系統(tǒng)的擾動(dòng)力矩,從而提高系統(tǒng)的魯棒性。鄭[13]提出一種能在加工機(jī)床上實(shí)現(xiàn)大范圍的伺服位置控制方案,有效提高工程效率。
綜上所述,國(guó)內(nèi)外學(xué)者對(duì)伺服運(yùn)動(dòng)系統(tǒng)的控制策略進(jìn)行了深入的研究,提出了許多創(chuàng)新的方法和技術(shù)。但目前運(yùn)動(dòng)伺服系統(tǒng)還存在軌跡跟蹤效果差,響應(yīng)速度慢等一系列問題需要去解決,因此,為提高伺服運(yùn)動(dòng)系統(tǒng)的瞬態(tài)性能,本文設(shè)計(jì)了伺服運(yùn)動(dòng)系統(tǒng)三步非線性控制器,該控制器結(jié)構(gòu)清晰、控制意義明確、易于工程化實(shí)現(xiàn)。
1 伺服運(yùn)動(dòng)系統(tǒng)建模
設(shè)x= θ ,x= ω,,y=x,經(jīng)過等式變換得:
則關(guān)于y 的關(guān)系式:
接下來對(duì)y 進(jìn)行三步法控制律的推導(dǎo)。
2 三步非線性控制律推導(dǎo)
三步非線性控制方法主要包含三部分[15]:類穩(wěn)態(tài)控制、動(dòng)態(tài)參考前饋控制以及誤差反饋控制。類穩(wěn)態(tài)控制是將被控量的輸出狀態(tài)假設(shè)穩(wěn)定,使其快速達(dá)到穩(wěn)定狀態(tài);參考動(dòng)態(tài)前饋控制主要用于對(duì)目標(biāo)期望角度軌跡的快速跟蹤,增強(qiáng)系統(tǒng)的動(dòng)態(tài)響應(yīng);最后一步誤差反饋控制是結(jié)合前兩步的控制律,利用輸入輸出狀態(tài)產(chǎn)生的誤差進(jìn)行控制,求出誤差反饋控制律。
2.1 類穩(wěn)態(tài)控制
類穩(wěn)態(tài)是假設(shè)系統(tǒng)達(dá)到穩(wěn)定的狀態(tài),將類穩(wěn)態(tài)控制律設(shè)為u=us,所以令,代入得:
求得:
這一步推導(dǎo)出的類穩(wěn)態(tài)控制律可以提高旋轉(zhuǎn)運(yùn)動(dòng)伺服系統(tǒng)的穩(wěn)定性。
2.2 參考動(dòng)態(tài)前饋控制
對(duì)于該伺服運(yùn)動(dòng)系統(tǒng),僅采用類穩(wěn)態(tài)控制并能使系統(tǒng)達(dá)到期望的性能。對(duì)于動(dòng)態(tài)變化的參考目標(biāo)y*,需引入一個(gè)前饋反饋來提高系統(tǒng)的動(dòng)態(tài)跟蹤性能。uf為動(dòng)態(tài)前饋控制律,此時(shí)系統(tǒng)控制輸入為u=u+u,令y=y,則等式變?yōu)椋?/p>
可求得:
參考動(dòng)態(tài)前饋控制律uf中包括y˙和 ˙y˙,表現(xiàn)出當(dāng)參考目標(biāo)動(dòng)態(tài)發(fā)生變化時(shí)系統(tǒng)的調(diào)節(jié)作用。這一步推導(dǎo)出的參考動(dòng)態(tài)前饋控制律提高了系統(tǒng)的響應(yīng)速度,響應(yīng)速度更快。
2.3 誤差反饋控制
由于非線性系統(tǒng)具有不確定的擾動(dòng),為降低建模誤差和不確定因素對(duì)系統(tǒng)的魯棒性影響,考慮對(duì)系統(tǒng)添加誤差反饋,增強(qiáng)系統(tǒng)的魯棒性,以便系統(tǒng)達(dá)到期望值。定義ue為誤差反饋控制律,因此將上面公式中所求得的us和uf代入,可得:
化簡(jiǎn)得:
為進(jìn)一步減少旋轉(zhuǎn)運(yùn)動(dòng)伺服系統(tǒng)的軌跡曲線和參考信號(hào)的誤差,引入積分項(xiàng)中,X=∫e dt,該誤差反饋ue具有比例- 積分- 微分結(jié)構(gòu),通過k0,k1,k2可表示為:
ue可以定義成帶有典型的PID 控制律:
通過求解誤差反饋控制律,使伺服運(yùn)動(dòng)系統(tǒng)跟蹤精度提高,抗干擾能力提高,魯棒性更優(yōu),控制性能提高。
3 仿真結(jié)果
求得類穩(wěn)態(tài)控制律、參考動(dòng)態(tài)前饋控制律和誤差反饋控制律后,進(jìn)行simulink 仿真實(shí)驗(yàn),將三步非線性控制策略的伺服運(yùn)動(dòng)曲線與傳統(tǒng)PID 控制曲線進(jìn)行對(duì)比參照,分別給予階躍信號(hào)、方波信號(hào)和正弦信號(hào),觀察偏轉(zhuǎn)角度θ 與電壓Vm的變化曲線,仿真結(jié)果見圖1 和圖2。

圖1 階躍信號(hào)三步法與PID 的θl 曲線
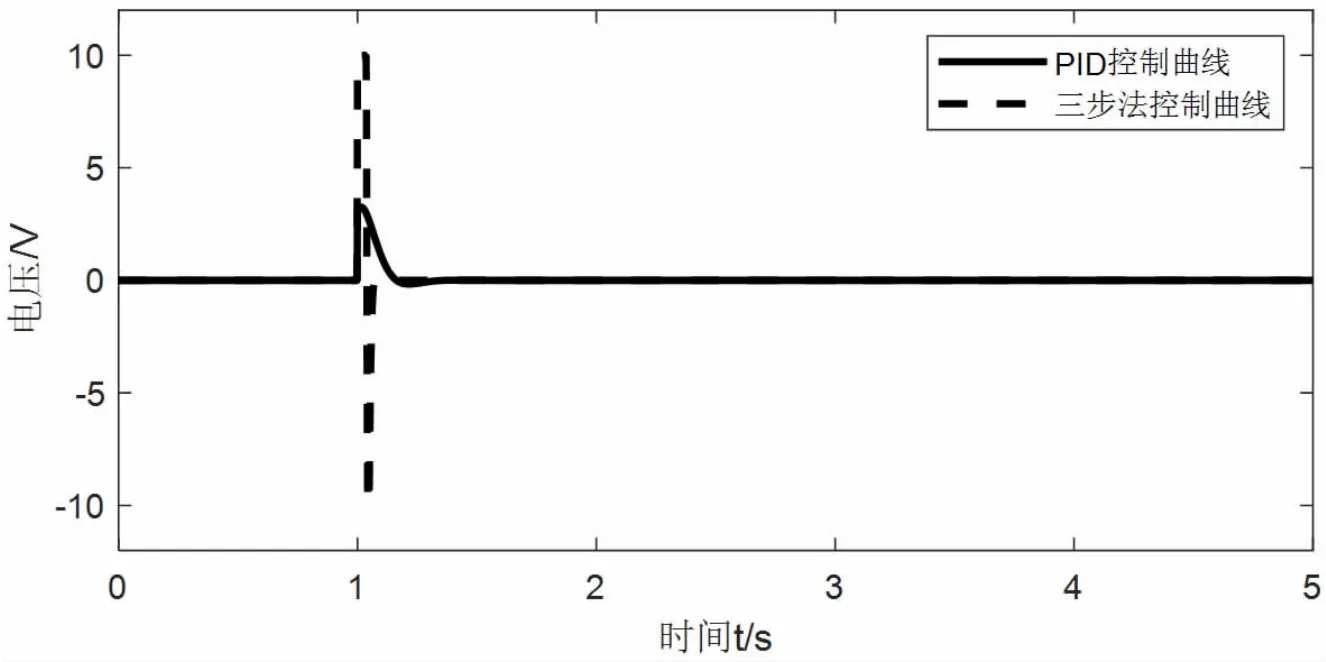
圖2 階躍信號(hào)三步法與PID 的Vm 曲線
圖1 和圖2 為階躍信號(hào)下的三步法非線性控制方法和PID 控制下的θl和Vm 的對(duì)比圖,在θ 圖中發(fā)現(xiàn)在階躍信號(hào)下,三步法比PID 控制方法快0.357 s到達(dá)穩(wěn)態(tài),且超調(diào)量為0,在Vm中發(fā)現(xiàn)電壓上限能達(dá)到10V,下限達(dá)到-10V,可完成控制目標(biāo);而PID 控制方法只能到達(dá)3.3V,完不成控制目標(biāo)。
圖3 和圖4 展示了在正弦信號(hào)下三步非線性控制方法和PID 控制方法對(duì)于θl和Vm的對(duì)比效果。在θ曲線下可以看出,三步法控制下的正弦曲線跟蹤效果明顯優(yōu)于PID 的控制曲線,在Vm曲線下,三步法初始電壓是1.5V,而PID 控制初始電壓是0V,運(yùn)行軌跡基本一致,可實(shí)現(xiàn)控制目標(biāo)。

圖3 正弦信號(hào)三步法與PID 的θl 曲線

圖4 正弦信號(hào)三步法與PID 的Vm 曲線
4 結(jié)論
本文首先對(duì)伺服運(yùn)動(dòng)系統(tǒng)進(jìn)行數(shù)學(xué)建模,得到非線性方程,再對(duì)該模型進(jìn)行三步非線性控制器的設(shè)計(jì),推導(dǎo)出類穩(wěn)態(tài)控制律、參考動(dòng)態(tài)前饋控制律和誤差反饋控制律最后進(jìn)行仿真分析,驗(yàn)證了該控制方法的可行性,在伺服運(yùn)動(dòng)系統(tǒng)中可以有更快的響應(yīng)速度、更精準(zhǔn)的控制效果以及更強(qiáng)的魯棒性,該控制方法可在工業(yè)生產(chǎn)中具有可行性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34