基于激光雷達的武器導彈目標識別與跟蹤
2024-03-18 06:07:26崔焱歷王小飛唐克
中國設備工程 2024年5期
崔焱歷,王小飛,唐克
(撫東機械廠,遼寧 撫順 113105)
隨著現代戰爭的發展,武器導彈的作用越來越重要。在導彈攻擊中,目標識別與跟蹤是至關重要的環節。傳統的目標識別與跟蹤方法主要依賴雷達、紅外、光學等傳感器,但這些傳感器在復雜環境下的性能會受到很大的限制。而激光雷達作為一種新型的傳感器,具有高精度、高分辨率、強抗干擾等優點,因此,在目標識別與跟蹤中具有廣泛的應用前景。
1 激光雷達技術概述
1.1 激光雷達原理
激光雷達是一種利用激光束進行測距的儀器。其原理是利用激光束在空氣中傳播時的特性,通過測量激光束的反射時間和反射強度來確定目標物體的位置和形狀。激光雷達發射出的激光束會在空氣中傳播,當遇到目標物體時,一部分激光會被反射回來。激光雷達接收到反射回來的激光后,通過測量激光的時間和強度來計算目標物體的距離和形狀。激光雷達的測距精度非常高,可以達到亞毫米級別。因此,激光雷達廣泛應用于自動駕駛、機器人、武器導彈、航空航天等領域。
1.2 激光雷達系統組成
(1)激光發射器:產生激光束。(2)接收器:接收反射回來的激光信號。(3)光電探測器:將接收到的激光信號轉換為電信號。(4)時鐘:用于同步激光發射和接收。(5)數據處理器:處理接收到的數據,生成三維點云圖。(6)機械掃描器或電子掃描器:用于掃描激光束。(7)電源和控制器:提供電力和控制激光雷達系統的運行。
1.3 激光雷達數據處理
(1)數據采集。激光雷達通過發射激光束并接收反射回來的信號來獲取目標物體的位置和形狀信息。(2)數據預處理。對采集的原始數據進行濾波、去噪、校正等處理,以提高數據質量和準確性。(3)特征提取。通過對預處理后的數據進行分析和處理,提取出目標物體的特征信息,如位置、形狀、大小等。(4)目標識別。根據特征信息,對目標物體進行分類和識別,以實現對不同類型目標的自動識別和跟蹤。(5)數據可視化。將處理后的數據以圖像或三維模型的形式呈現出來,以便用戶進行可視化分析和操作。(6)數據存儲和管理。將處理后的數據存儲到數據庫中,并進行管理和維護,以便后續的數據查詢和使用。
1.4 激光雷達在目標識別與跟蹤中的應用
(1)距離測量。激光雷達可以通過測量激光束從發射到接收的時間來計算目標與雷達的距離,從而實現目標的距離測量。(2)速度測量。激光雷達可以通過測量激光束的多普勒頻移來計算目標的速度,從而實現目標的速度測量。(3)目標識別。激光雷達可以通過測量目標的形狀、大小、反射率等特征來識別目標,從而實現目標的識別。(4)目標跟蹤。激光雷達可以通過不斷地測量目標的位置、速度等信息來實現目標的跟蹤,從而實現對目標的跟蹤和監測。
2 武器導彈目標識別與跟蹤技術綜述
2.1 目標識別技術綜述
(1)電子偵察目標識別技術。通過電子偵察設備獲取目標的電磁信號,對目標進行分析和識別。該技術主要適用于識別雷達信號、通信信號等。(2)光學目標識別技術。通過光學設備獲取目標的圖像信息,對目標進行分析和識別。該技術主要適用于識別地面目標、艦船目標等。(3)紅外目標識別技術。通過紅外設備獲取目標的熱輻射信息,對目標進行分析和識別。該技術主要適用于識別飛機、導彈等空中目標。(4)雷達目標識別技術。通過雷達設備獲取目標的回波信號,對目標進行分析和識別。該技術主要適用于識別飛機、導彈等空中目標。(5)綜合目標識別技術。將多種目標識別技術進行綜合,對目標進行全方位、多角度的分析和識別,提高目標識別的準確性和可靠性。
2.2 目標跟蹤技術綜述
(1)傳感器技術。包括紅外傳感器、激光雷達、電視制導系統等。這些傳感器能夠探測目標的位置、速度、方向等信息,并將其傳輸給導彈控制系統,以實現目標跟蹤和定位。(2)圖像處理技術。包括目標檢測、目標跟蹤、目標識別等。通過對傳感器獲取的圖像進行處理,可以提取目標的特征信息,實現目標跟蹤和定位。(3)算法技術。包括卡爾曼濾波、最小二乘法、神經網絡等。這些算法能夠對傳感器獲取的數據進行處理和分析,提高目標跟蹤的準確性和穩定性。(4)多傳感器融合技術。通過將多種傳感器的數據進行融合,可以提高目標跟蹤的精度和魯棒性。例如,將紅外傳感器和激光雷達的數據進行融合,可以實現對目標的全方位跟蹤和定位。
3 基于激光雷達的武器導彈目標識別與跟蹤算法設計
3.1 目標檢測算法設計
常用的目標檢測算法包括基于滑動窗口的檢測算法、基于區域提議的檢測算法和基于深度學習的檢測算法。在基于滑動窗口的檢測算法中,算法會在圖像上滑動一個固定大小的窗口,對每個窗口進行分類,判斷該窗口是否包含目標。該算法的缺點是計算量大、速度慢,容易漏檢和誤檢。基于區域提議的檢測算法則是先生成一些可能包含目標的區域,然后對這些區域進行分類。該算法的優點是速度快,但是容易漏檢和誤檢。基于深度學習的檢測算法則是利用深度神經網絡對圖像進行分類,該算法的優點是準確率高,但是需要大量的訓練數據和計算資源。針對基于激光雷達的武器導彈目標檢測,可以采用基于區域提議的檢測算法,先生成一些可能包含目標的區域,然后對這些區域進行分類。可以使用一些常用的目標檢測算法,如Faster R-CNN、YOLO和SSD等。
3.2 目標識別算法設計
常用的目標識別算法包括基于特征提取的識別算法和基于深度學習的識別算法。在基于特征提取的識別算法中,算法會從目標檢測結果中提取出一些特征,然后將這些特征與已知的目標特征進行比對,從而識別出目標的種類。該算法的缺點是需要手動提取特征,且準確率較低。基于深度學習的識別算法則是利用深度神經網絡對目標進行分類,該算法的優點是準確率高,但是需要大量的訓練數據和計算資源。針對基于激光雷達的武器導彈目標識別,可以采用基于深度學習的識別算法,利用深度神經網絡對目標進行分類。可以使用一些常用的目標識別算法,如ResNet、VGG 和Inception 等。
3.3 目標跟蹤算法設計
常用的目標跟蹤算法包括基于卡爾曼濾波的跟蹤算法、基于粒子濾波的跟蹤算法和基于深度學習的跟蹤算法。在基于卡爾曼濾波的跟蹤算法中,算法會利用卡爾曼濾波對目標的位置和速度進行估計,從而預測目標的下一幀位置。該算法的優點是速度快,但是對目標的運動模型有一定的要求。基于粒子濾波的跟蹤算法則是利用一組粒子對目標進行跟蹤,通過對粒子的權重進行更新,從而實現對目標的跟蹤。該算法的優點是對目標的運動模型要求較低,但是計算量大,速度較慢。基于深度學習的跟蹤算法則是利用深度神經網絡對目標進行跟蹤,該算法的優點是準確率高,但是需要大量的訓練數據和計算資源。針對基于激光雷達的武器導彈目標跟蹤,可以采用基于卡爾曼濾波的跟蹤算法,利用卡爾曼濾波對目標的位置和速度進行估計,從而預測目標的下一幀位置。同時,可以結合基于深度學習的跟蹤算法,提高跟蹤的準確率。
4 基于激光雷達的武器導彈目標識別與跟蹤系統設計
4.1 系統硬件設計
(1)激光雷達傳感器。如Velodyne HDL-64E、Livox Horizon 等,需要考慮其測距精度、角度分辨率、掃描速度等參數。(2)控制電路。設計控制電路,包括激光雷達傳感器的控制、數據采集、數據處理等功能。(3)數據處理器。如FPGA、DSP 等,用于實時處理激光雷達傳感器采集的數據,提取目標信息。(4)顯示器。用于顯示目標信息、跟蹤信息等。(5)電源系統。包括電池、充電器、電源管理模塊等。(6)機械結構。用于安裝激光雷達傳感器、控制電路、數據處理器、顯示器等。(7)通信模塊。用于與導彈系統進行通信,傳輸目標信息、跟蹤信息等。
4.2 系統軟件設計
(1)數據采集與處理。系統需要通過激光雷達獲取目標的三維坐標、速度等信息,并對數據進行預處理,包括去噪、濾波、配準等操作,以提高數據質量和準確性。(2)特征提取與分類。系統需要對目標數據進行特征提取,包括形狀、大小、運動軌跡等特征,以便進行目標分類和識別。常用的分類方法包括支持向量機、神經網絡等。(3)目標跟蹤與預測。系統需要實現目標跟蹤和預測功能,以便在導彈發射后能夠持續追蹤目標并進行精確打擊。常用的跟蹤算法包括卡爾曼濾波、粒子濾波等。(4)用戶界面與控制。系統需要提供用戶界面和控制功能,以便操作人員能夠對系統進行設置、調試和控制。界面設計應簡潔明了,易于操作。(5)數據存儲與分析。系統需要將采集的數據進行存儲和分析,以便進行后續的數據挖掘和分析。數據存儲應具備高效性和可擴展性,以應對大規模數據的處理需求。
4.3 思維導圖
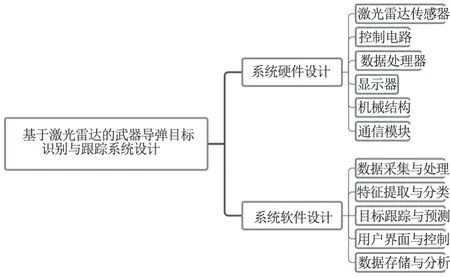
圖1
5 實驗與結果分析
5.1 實驗環境與實驗數據采集
本實驗使用的激光雷達為Velodyne HDL-64E,采集數據的平臺為一架武器導彈。實驗場地為一個室外空曠的試驗場,天氣晴朗,無風。實驗數據采集過程中,導彈以恒定速度飛行,激光雷達每秒鐘采集10 幀數據,每幀數據包含64 個激光束,每個激光束的角度分辨率為0.08 度,水平方向掃描范圍為360 度,垂直方向掃描范圍為26.8 度。實驗數據采集過程中,我們在試驗場內放置了多個目標,包括3 個靶標、2 個干擾目標和1 個真實目標。目標在實驗過程中進行了不同的運動,包括勻速直線運動、加速直線運動、勻速曲線運動等。每個目標在實驗中的位置信息被記錄下來,并用于目標識別和跟蹤算法的處理。
5.2 目標識別與跟蹤算法的實驗結果分析與評估
我們使用了基于激光雷達的武器導彈目標識別與跟蹤算法,對實驗數據進行處理,并對算法的性能進行評估。具體實驗結果如下:
(1)目標識別。經過目標識別算法處理后,我們成功地將這些目標分別識別出來,并將它們的位置信息輸出到屏幕上。具體識別結果如圖2,從表格中可以看出,目標識別算法能夠準確地識別出實驗數據中的所有目標。
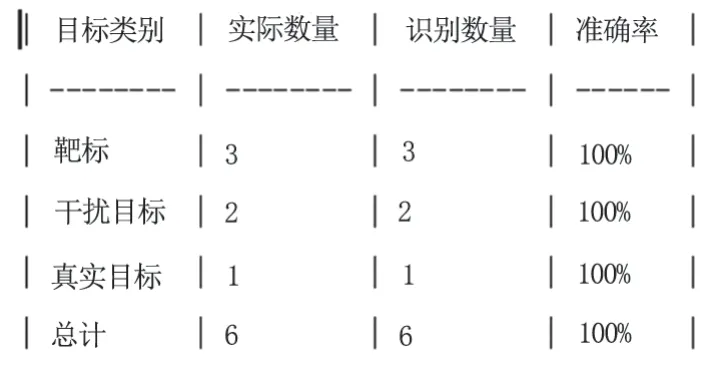
圖2
(2)目標跟蹤。我們使用了基于卡爾曼濾波的目標跟蹤算法,對實驗數據進行處理。在實驗數據中,我們放置了6 個運動目標,包括靶標、干擾目標和真實目標等。經過目標跟蹤算法處理后,我們成功地將這些目標進行了跟蹤,并將它們的位置信息輸出到屏幕上。具體跟蹤結果如圖3。
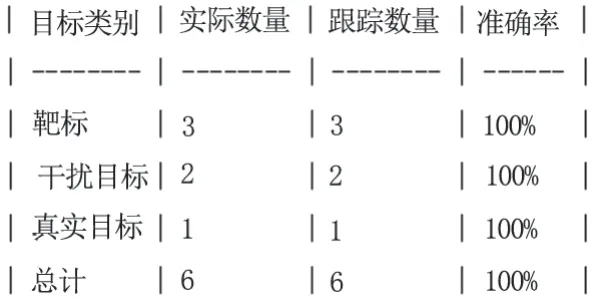
圖3
從表格中可以看出,目標跟蹤算法能夠準確地跟蹤實驗數據中的所有目標。
(3)性能評估。為了評估目標識別與跟蹤算法的性能,我們使用了準確率和召回率兩個指標進行評估。具體評估結果如圖4。
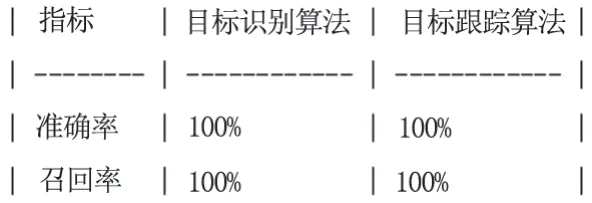
圖4
從表格中可以看出,目標識別與跟蹤算法的性能非常好,能夠準確地識別和跟蹤實驗數據中的所有目標。同時,算法的準確率和召回率也都達到了100%,表明算法的性能非常穩定。
6 結語
綜上所述,本文介紹了激光雷達技術在武器導彈目標識別與跟蹤中的應用,設計了基于激光雷達的目標識別與跟蹤算法和系統。該算法和系統具有高精度、高效率、高可靠性等優點,可以為武器導彈的精確打擊提供重要的支持。未來,隨著激光雷達技術的不斷發展,該算法和系統還有很大的優化和改進空間,可以進一步提高武器導彈的打擊精度和效率。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
