自動化門座起重機在散貨碼頭中的應用
2024-03-21 07:39:40余建夫崔建勛
港工技術 2024年1期
余建夫,崔建勛
(中交第一航務工程勘察設計院有限公司,天津 300220)
引言
一直以來,通用散貨碼頭門座起重機(以下簡稱“門機”)尤其是非帶斗門機的自動化作業是當前通用散貨碼頭自動化裝卸作業的研究熱點,如何實現通用散貨碼頭門機自動化作業也是打造“智慧”港口的重要組成部分。
1 常規散貨碼頭門機卸船作業模式
常規散貨碼頭門機卸船作業時需配置門機司機及看鉤手,由看鉤手指揮門機司機完成散貨船舶艙內取料作業。傳統門機作業由于操作環境復雜,操作動作涉及起升、變幅、旋轉、行走等多個動 作[1]。既有門機操作模式具有以下特點:
1)對司機操作熟練程度要求較高,也是影響效率的主要因素;而隨著司機作業時長的增加作業效率及安全性會大幅下降;
2)司機作業環境較為惡劣,粉塵較大,對司機的身體及作業視線均會造成不利影響;
3)人為操作,增加安全隱患,同時也會增加違章操作或不規范操作的風險。
2 門機自動化方案
門機自動化作業系統主要包括:掃描與定位、自動化控制、遠程操作、安防模塊四個子系統。
2.1 掃描與定位子系統
掃描與定位子系統包含“掃描和數據采集系統”和“定位系統”。
1)掃描和數據采集系統
在門機臂架安裝3D 掃描儀及云臺,如圖1 所示,系統中3D 掃描儀作為眼睛,對散貨船舶艙口和艙內物料進行掃描,形成三維圖像及艙口、料堆信息數據庫。數據采集控制器可以采集船型,天氣等數據并記錄天氣對船艙晃動影響,同時把數據存放在數據庫里,根據不同的船型、天氣調用不同的數據。同時3D 掃描儀可對漏斗進行掃描,并進行仿真處理,形成三維圖像,確定漏斗位置。
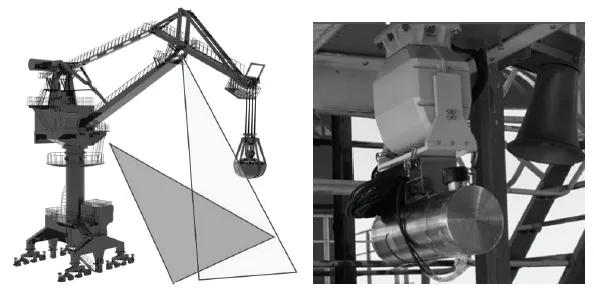
圖1 3D 掃描儀及云臺Fig.1 3D scanner and gimbal
其中,三維仿真可操作軟件安裝于觸摸屏設備,三維仿真圖像可立體、真實的顯示當前散貨船舶艙內物料及艙口位置、形態,如圖2 所示。智能三維數據采集和處理軟件會根據掃描的艙內物料信息設置門機當前可以抓取的區域,再將靠近艙壁的邊上區域去掉,選取區域內物料當前最高點自動抓取。系統會將該動作轉化為PLC 控制指令,數據采集處理與三維成像系統與PLC 控制系統之間數據實時交互,實現回轉變幅帶動抓斗平穩、精確落入最佳抓料點進行抓料卸船。遇到特殊情況,操作人員也可以通過點擊觸摸屏料堆三維立體圖形選定抓斗抓料點,由PLC 自動控制抓斗到達選定的抓料點進行抓料,并自動回到后方漏斗卸料。

圖2 船艙三維仿真圖像Fig.2 3D simulation image of the cabin
2)定位系統
精確的定位功能是一切自動化作業的基礎保障,需確保定位精度以實現對抓斗的無人精確控 制[2-3]。所有機構均采用兩套系統進行冗余控制,當任意一套系統失效時,系統可以立刻響應并執行安全保護策略。
①起升機構:采用增量編碼器、絕對值編碼器進行起升高度定位;
②變幅機構:采用增量編碼器、絕對值編碼器進行門機幅度定位;
③旋轉機構:采用增量編碼器、絕對值編碼器、GPS 進行門機幅度定位;
④大車定位:采用增量編碼器、絕對值編碼器、GPS、FLAG 定位板進行門機大車定位,以編碼器定位為主,FLAG 板定位為輔。
2.2 自動化控制子系統
自動化控制子系統包含“數據傳輸系統”和“避讓及防撞系統”。
1)數據傳輸
門機的通訊系統采用光纖通訊。對比無線通訊,光纖通訊的可靠性比較高。通訊系統采用傳統的光纜卷盤方式結合滑環改造的方式,光纖通訊系統出現故障,可切換為人工操作作業。
滑環旋轉處采用無線方式傳輸數據,將門機設備上的控制數據及視頻數據實時傳輸到中控系統,該系統具有高帶寬、低延時特性。控制及視頻數據的延時均可控制在200 ms 以內。
2)避讓及防撞
通過掃描儀可以收集船艙和漏斗信息,通過門機自動化服務器計算出抓斗與船艙、抓斗與漏斗的關系,通過計算兩者之間的距離起到防撞的作用。兩個相鄰門機處于面對面作業時,兩個門機的臂架可能會發生碰撞。在這種情況下,通過定位門機各個機構,經由門機自動化服務器軟件進行控制,當軟件檢測到可能發生碰撞時,可以預先進行控制,避免出現碰撞[4-5]。
2.3 遠程操作子系統
遠程操作子系統由操作臺、HMI 系統、視頻換和操作臺PLC 站組成。
1)操作臺
操作面板上設有和司機室聯動臺相同功能的操作設備,中控人員可以通過遠程操作臺操作任意一臺門機,通過將“遠程操作”鑰匙開關打到ON獲取操作權限。考慮到遠程操作與就地操作的不同,可以根據用戶需要調整遠程操作臺上的按鈕功能,將部分輔助功能的按鈕做到操作臺相關軟件中,操作面板上只保留少量必要的按鈕。
2)HMI 系統
操作臺上配備HMI 系統,如圖3 所示,可以連接到現場任意一臺門機上的PLC 并進行監控。操作人員在中控遠程操作某一臺門機時,此管理系統可以為司機提供現場司機室內HMI 相同的功能。系統可將所有門機的設備信號通過以太網收集到上位軟件中統一管理,通過主畫面的按鈕可進行各大機之間的切換。系統具備LCMS 的同等功能,實時顯示設備I/O 點狀態和故障信號。
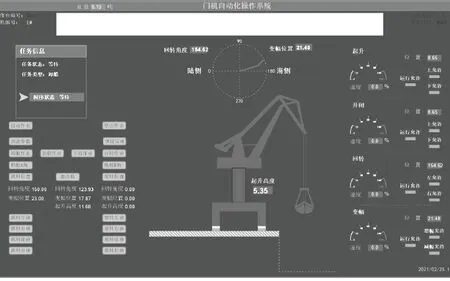
圖3 HMI 系統界面示意圖Fig.3 HMI system interface
3)視頻畫面
操作臺上實時顯示門機作業區域畫面,回向可進行手動切換,也可跟隨動作機構自動化切換。主要包含船艙畫面、漏斗監控畫面、電纜導向架、電氣房、機房以及大車軌道畫面等。
4)操作臺PLC 站
在遠程操作臺內還設有一個PLC 站,包括PLC模塊、電源、交換機、開關等元器件。此PLC 站的主要功能是接收司機在遠程操作臺上下達的指令并通過通訊將這些指令輸出到現場各門機上。
2.4 安防模塊
安防模塊主要包含煙霧報警模塊、人員入侵報警模塊、設備防撞模塊和報警查詢模塊。
1)煙霧報警
對司機室、機房、電氣房視頻進行實時檢測,當煙霧濃度達到一定的閾值時會觸發煙霧報警,適用于多種應用場景。通過關鍵區域監控視頻進行煙霧檢測可以實現煙霧檢測報警功能。在煙霧發生期間,系統會持續給出告警,并生成告警特征數據、告警照片,供后續查找、分析、取證。
2)人員入侵報警
對大車海側、路測視頻進行報警,對監控視頻中行人目標進行檢測,包括行人從不同角度、不同方向進入視頻告警區域。行人在告警區域內期間,系統持續給出告警,并生成告警特征數據、告警照片,供后續查找、分析、取證[6-7]。
3)設備防撞
分析大車海側、路測攝像頭視頻,發現有人員侵入防撞區域時,實時定位其位置,并生成結構化數據,對接控制網,通過防撞接口發送防撞控制指令,啟動防撞系統,對大車進行減速并停止,以達到自動防撞的效果,減少侵入人員人身傷害。安防模塊發送兩路信號,一路為狀態信號(人員入侵、煙霧告警等),一路為視頻流數據(現場照片)。
4)報警查詢
針對本期項目,定制開發告警管理統計功能。綁定的設備,可以被查看和檢索,可查看設備數、報警總數、當日報警數、報警信息列表、報警圖片等全局信息。
2.5 門機自動化作業流程
在現有技術條件下,門機自動化作業采用的是門機自動作業與遠程人工操作作業相結合的方式。具體流程是:
船舶靠岸停好后,根據調度指示中控派工遠程人工操作門機行車到指定位置,行車過程需有人現場監護,自卸車將漏斗移動到指定位置,門機上的掃描儀和圖像識別設備對船艙和漏斗進行掃描識別(船艙信息會儲存到數據庫中方便今后調用),根據調度指示中控派工門機開工,中控人員在中控室對門機自動化作業進行實時監控,出現異常情況及時介入人工操作,自卸車進入漏斗接貨(目前采用的工藝是自卸車與碼頭岸線水平進入漏斗接貨),根據調度指示中控切換為遠程人工操作吊取下艙機械下艙,過程需有人現場監護,下艙機械在船艙作業應拉警戒線,根據調度指示中控派工門機繼續自動作業,中控遠程人工操作門機清艙底,吊取下艙機械,行車到調度指示位置避讓船舶離港。
3 門機自動化方案技術難點
3.1 自動化門機防搖技術
門機在裝卸貨物時,由于其速度的變化以及外界干擾因素的影響,使抓斗前后,左右的來回擺動,在影響作業效率的同時造成一定的安全隱患。目前在門機作業時主要依靠門機司機的實時操作控制門機抓斗的擺動。
門機防搖技術的難點主要有以下兩點:
1)不同于集裝箱岸橋作業時吊具在一個平面內二維空間運動,門機作業時抓斗是在一個立體的三維空間內運動(起升、變幅、旋轉三機構聯動),其運動比較復雜,模型的建立比較困難。
2)門機抓斗當前的運動狀態沒有反饋,所有的控制都是基于開環控制,控制精度難以保證。
目前防搖技術在二維平面基本上可以依靠建立數學模型的開環控制,三維空間的東營港目前也是在實踐過程中,運行效果不錯[8]。防搖技術正在研究當中。針對外界的擾動(如突然的陣風等),目前還是依靠監控室的人工即時介入。
3.2 自動化門機作業粘度較大的貨類
粘度較大的貨類例如巴西礦、印度粉等,由于在作業時貨會粘在抓斗上,人工作業時司機會進行清斗。目前,自動化門機作業無法做到自動清斗,粘度較大的貨類需要遠程操作門機作業。如果采用閉斗進艙,自動化門機則可以進行粘度較大的貨類的作業,但影響一點兒效率。
3.3 自動化門機作業清倉
在船艙清倉作業時,由于艙內比較復雜,同時艙內有人機作業,門機自動化作業可能會與艙底、艙內設施、艙內工人發生交叉。目前,門機自動化作業在清倉時需要遠程操作門機作業。
4 結語
既有的普通卸散貨船的作業模式是司機+看鉤手的作業模式,實施自動化作業模式和遠程操控模式后,現場作業人員能夠大幅減少,遠程操控可以實現一人雙機或一人多機作業。自動化作業及遠程操控模式,能夠避免既有作業模式中門機司機吃飯、換班等生活時間,有效作業時間有了增加,同等作業工況下,自動化作業模式作業效率更加穩定。現場作業人員大幅減少,人為參與環節也大幅減少,特別是作業人員疲勞程度的下降,都對現場的安全管控起到了一定的積極作用。雨天或霧天作業,有效提高了作業的可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08