PLC 在農業機械智能化調度與路徑規劃中的應用研究
2024-03-22 09:05:34趙晶晶
南方農機 2024年6期
趙晶晶
(江蘇省宿遷經貿高等職業技術學校,江蘇 宿遷 223600)
1 PLC技術概述
1.1 PLC基本原理
PLC 的運作依賴于一系列模塊化組件,包括中央處理單元(CPU)、存儲器、輸入/輸出接口(I/O)以及通信接口。中央處理單元的核心是一個微處理器,常采用32 位或64 位架構,擁有高達400 MHz 的時鐘頻率,確保了處理速度和效率[1]。存儲器部分包括程序存儲器和數據存儲器,前者通常采用非易失性存儲介質,例如,閃存容量多在128 KB 至數MB 之間,而數據存儲器則包含用于臨時數據處理的RAM,容量通常在64 KB 至256 KB 之間。輸入/輸出接口的設計允許PLC與外部設備進行數據交換,這些接口能處理多種信號類型,如24 V DC 數字信號和4 mA~20 mA模擬信號,其反應時間低至微秒級別。此外,PLC 還支持多種通信協議,如MODBUS、PROFIBUS 等,以實現與其他控制系統或網絡設備的連接。
1.2 PLC功能與特點
PLC 的關鍵功能包括邏輯處理、順序控制、定時、計數和數據處理。這些功能得益于其高速的處理器,如具備最高1 GHz 處理速度的ARM Cortex 系列CPU,其快速響應時間通常為10 ms 以內,確保即時和準確的控制[2]。在特點方面,PLC 支持多種編程語言,如梯形圖、功能塊圖和結構化文本,使得編程更加靈活。其模塊化設計允許用戶根據需要輕松添加或更換I/O 模塊,使系統可擴展性較強。此外,PLC 還支持網絡功能,可通過工業以太網或其他通信協議(例如EtherCAT、CANopen)與其他設備進行數據交換,增強了其在復雜工業環境中的互聯互通能力。
2 基于PLC的農業機械智能化調度系統設計
2.1 PLC系統硬件選擇
在設計基于PLC 的農業機械智能化調度系統時,PLC系統的硬件選擇至關重要。
1)中央處理單元(CPU)的選擇應基于其處理能力和存儲容量,考慮到農業環境中數據處理和控制命令的復雜性,推薦選用具有高速處理器(至少1 GHz)和較大存儲空間(至少512 MB RAM及2 GB的閃存)的CPU。這樣的配置確保了快速、準確的數據處理和足夠的程序存儲空間[3]。
2)輸入/輸出(I/O)模塊必須能夠處理各種傳感器和執行器的信號,如溫度、濕度、GPS 定位和速度控制等。選擇具有多種模擬和數字輸入/輸出通道的I/O模塊是關鍵,這些模塊應支持至少24 V DC的數字輸入和0~10 V 或4 mA~20 mA 的模擬輸入以及對應的輸出能力[4]。在通信方面,選用支持多種工業通信標準的PLC 是必要的,這包括但不限于以太網、CAN 總線和無線通信接口,以確保與農業機械及監控系統的無縫連接。特別是支持先進的工業協議如EtherNet/IP 或PROFINET 的PLC 可以大大提高數據傳輸效率和系統整體可靠性。
3)考慮到農業環境的特殊性,所選PLC 的耐環境性能也非常關鍵。這意味著PLC 硬件應具備良好的防塵、防潮、抗震能力以及在廣泛的溫度范圍內穩定運行的能力(如-20 °C~60 °C)。
2.2 PLC軟件編程
編程首先要基于系統的具體需求,例如作物種植模式、土壤狀況監測、灌溉系統控制等,來設計合理的控制邏輯和數據處理流程[5]。在此過程中,使用高級編程語言如結構化文本(Structured Text)或梯形圖(Ladder Logic)來編寫控制算法是常見的做法。這些語言不僅提供了強大的邏輯處理能力,而且支持復雜的數據結構和控制流程,如多線程處理和事件驅動編程。為了實現精確的調度控制,編程中需要集成先進的算法,如模糊邏輯控制、神經網絡或機器學習算法,以優化決策過程和適應多變的農業環境[6]。例如,通過集成環境監測數據(如溫度、濕度、光照強度)和作物生長模型,PLC 程序可以智能調整灌溉和施肥策略。此外,PLC 程序還需考慮與外部設備和系統的通信需求。這通常涉及實現工業通信協議(如MODBUS TCP、OPC UA)的接口,確保與傳感器、監控系統、云平臺等的高效數據交換。程序還應包括故障檢測和自我診斷功能,以實時監控系統狀態并在異常情況下觸發警報或采取應對措施。
2.3 通信網絡設計
在基于PLC 的農業機械智能化調度系統中,通信網絡的設計是確保信息高效流通和系統穩定運行的關鍵。
1)核心網絡應采用工業級以太網,以保證高速數據傳輸,通常要求至少1 Gbps 的傳輸速率和低于10 ms 的延遲[7]。對于遠程或移動農業機械,采用無線通信技術,如LTE 或即將普及的5G 網絡,可以提供高達100 Mbps 的下行速率和低至1 ms 的延遲,確保遠程控制和數據傳輸的實時性和可靠性[8]。
2)網絡架構應采用分層設計,以確保可擴展性和靈活性。在底層,現場總線如CAN 或MODBUSRTU 適用于近距離、低速率的設備連接。在中層,以太網或無線網絡可用于連接各個PLC 和中心控制系統[9]。在頂層,云連接或VPN 技術可實現與遠程監控中心的數據交互。
3)網絡的設計還應考慮安全性。采用先進的加密技術和安全協議,如SSL/TLS 或VPN,可以防止數據被非法攔截或篡改。同時,網絡中的每個節點都應具備防火墻和入侵檢測系統,以防止外部攻擊。
3 基于PLC的農業機械路徑規劃系統實現
3.1 采集農田環境數據
在基于PLC 的農業機械路徑規劃系統實現中,采集農田環境數據是關鍵的第一步。此過程涉及使用多種高精度傳感器,如多光譜傳感器、激光雷達(LiDAR)、GPS 定位系統及地形掃描儀。這些傳感器能夠提供農田地形、作物長勢、土壤濕度、光照強度等多維度的數據[10]。例如,多光譜傳感器可以捕捉不同波長的反射光譜數據,用于分析作物健康狀況。這些數據通過高速通信網絡(如工業以太網或無線通信網絡)傳輸至PLC 系統。PLC 內部的高性能CPU(處理速度至少1 GHz)和大容量存儲(至少512 MB RAM)則負責處理這些數據,提取關鍵信息。例如,利用地形數據生成高精度的三維地圖,基于作物長勢數據進行作業區域的精確劃分。采集到的環境數據不僅為路徑規劃提供了基礎,還能夠用于監測作業過程中的環境變化,確保路徑規劃系統的實時性和適應性。
3.2 優化路徑規劃算法
路徑規劃算法優化過程中,關鍵是采用高級算法,如A*搜索算法、遺傳算法,這些算法能夠在復雜的農田環境中找到最優或近似最優的路徑。例如,A*搜索算法通過評估從起點到目標點的預估總成本(包括實際成本和預估剩余成本)來確定最短路徑。在農業應用中,這個算法可以結合地形、作物分布及其他障礙物信息來計算成本,從而規劃出高效的行駛路線。遺傳算法則模仿自然選擇的過程,通過迭代進化來優化路徑規劃,在處理大規模或變化多端的農田環境時尤其有效。這些算法的實施需要PLC 系統具備強大的數據處理能力和高效的算法執行環境。因此,在PLC 編程中,不僅要實現這些復雜的算法,還要優化內存和處理速度,以確保路徑規劃的實時性和準確性。
3.3 控制路徑跟蹤
路徑跟蹤控制過程涉及復雜的控制算法和精確的傳感器反饋。主要采用的控制算法包括比例-積分-微分(PID)控制器、純跟蹤控制器以及模糊邏輯控制器。例如,PID 控制器可以根據路徑偏差(即機械實際位置與預定路徑之間的差異)動態調整機械的行駛方向和速度,其關鍵參數如比例系數、積分系數和微分系數需根據具體應用環境進行精細調整。純跟蹤控制器適用于機械在較復雜地形中的路徑跟蹤,它依賴于機械當前位置與預定路徑之間的橫向距離和角度差異來調整行駛方向。模糊邏輯控制器則通過模擬人類的決策過程來處理模糊和不確定的信息,特別適用于變化多端的農田環境。
此外,實時的傳感器數據對于路徑跟蹤控制至關重要。GPS 系統提供精確的位置信息,其精度可達厘米級;同時,慣性測量單元(IMU)和輪速傳感器可以提供關于機械速度和方向的數據。PLC 系統需實時處理這些傳感器數據,并據此調整機械行駛的速度和方向,以確保路徑跟蹤的準確性和穩定性。
4 試驗分析與實證研究
4.1 試驗設計
為驗證所提出的基于PLC 的農業機械智能化路徑規劃方法的效果,本研究設計了如下田間試驗。
1)試驗平臺:采用John Deere 8330 輪式拖拉機作為試驗載體,配置Trimble SPS882 RTK GPS 定位系統實現高精度定位,傳感器采集的數據精度為2 cm。同時,安裝XSENS MTi-300 IMU 模塊獲取機械的速度、方向等狀態信息,IMU 的陀螺儀和加速度計精度分別為0.01°/s 和0.002 m/s2。PLC 系統整合了改進的純跟蹤控制算法,控制周期為50 ms。
2)試驗場地:選擇測試站內100 m×100 m 的標準試驗田,地面平整,設置了5 種不同復雜度的路徑,路徑長度從100 m 到500 m 不等。
3)對比算法:試驗將分別測試傳統PID 控制、標準純跟蹤控制和改進控制算法在不同路徑下的跟蹤精度和穩定性。
4.2 結果分析與討論
通過上述試驗設計,對不同路徑下各種控制算法的跟蹤性能進行了定量分析,如表1 所示。結果表明,在路徑長度為100 m 的簡單線性路徑下,PID、標準純跟蹤和改進控制的最大跟蹤誤差較小,均在3 cm 左右。但隨著路徑復雜度的提高,尤其是出現多次連續轉向時,PID 和標準純跟蹤控制的最大誤差明顯增加,在長度為500 m 的S 形復雜路徑下,誤差分別達到18.3 cm 和12.5 cm。而改進控制算法的最大誤差始終維持在8 cm 左右,明顯優于其他兩種方法。這是因為傳統PID 存在積分飽和問題,而標準純跟蹤控制對非線性復雜路徑的適應性較差。相比之下,改進算法采用了自適應積分飽和處理和當前Yaw 角預測方案,顯著提升了路徑跟蹤的魯棒性和適應性。
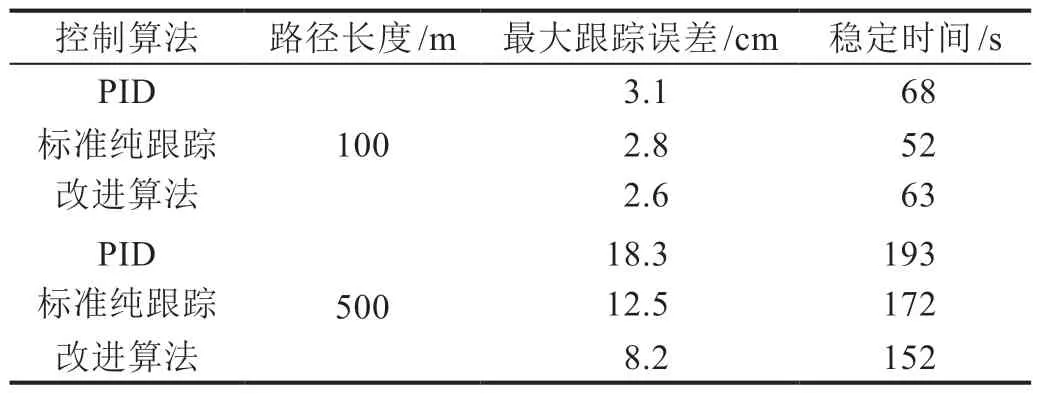
表1 不同路徑下三種控制算法的具體指標對比
在另一關鍵指標穩定時間方面,隨著路徑復雜度提高,PID 控制的穩定時間從68 s 增至193 s,標準純跟蹤從52 s 增至172 s,改進控制算法的穩定時間維持在63 s~152 s,增長緩慢。該結果表明改進控制算法能夠快速跟蹤復雜路徑,使機械運動保持平穩。
以上分析表明,本文所提出的改進純跟蹤控制算法在復雜路徑的跟蹤精度和穩定性方面顯示出顯著優勢,驗證了該方法在農業機械智能化路徑規劃中的效果。
5 結語
綜上,本研究的理論分析、系統設計與算法優化為PLC技術在下一代智能農機中的廣泛應用奠定了基礎。展望未來,隨著物聯網、大數據等新技術的發展,PLC 的功能將得到進一步擴展,使農業機械向更高的智能化程度邁進,為現代精準農業提供有力支持。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17