智能網聯汽車網絡架構分析及安全檢測*
2024-03-26 04:48:20袁豪杰
信息安全與通信保密 2024年1期
袁豪杰,唐 剛
(中國軟件評測中心,北京 100048)
0 引 言
當前,隨著全球新一輪科技革命和產業變革的蓬勃發展,汽車與信息通信等領域技術加速融合,電動化、網聯化、智能化成為汽車產業的發展潮流和趨勢,其中,智能網聯汽車已經成為汽車行業未來發展的主要方向。智能網聯汽車是指搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術,實現車與車、路、人、云端等(以下用X 代替)智能信息交換、共享,具備復雜環境感知、智能決策、協同控制等功能,可實現安全、高效、舒適、節能行駛,并可最終實現替代人完成駕駛操作的新一代汽車。國務院辦公廳2020年發布的《新能源汽車產業發展規劃(2021—2035年)》提出,新能源汽車將融匯互聯網、大數據、人工智能等多種變革性技術,推動汽車從單純交通工具向移動智能終端、儲能單元和數字空間轉變[1]。國家發改委2020年發布的《智能汽車創新發展戰略》指出,到2025年,我國智能網聯汽車的技術創新、產業動態、基礎設施、法規標準、產品監管和網絡安全體系將基本形成[2]。綜合來看,在互聯網技術和智能技術的影響下,信息通信企業,新興互聯網科技公司,網絡運營商、服務商以及基礎設施公司不斷融入汽車產業,使得汽車產業由垂直產業鏈向網狀生態圈演變,成為未來汽車產業生態不可或缺的重要組成部分。
然而,在智能網聯汽車快速發展的同時,智能網聯汽車網絡和數據安全問題隨之快速增多。據統計,2018年針對智能汽車的網絡攻擊數量是2010年的6 倍,2022年則增至20 倍[3]。在此背景下,對比分析傳統汽車和智能網聯汽車架構,并面向智能網聯汽車開展安全檢測研究具有重要意義。
1 傳統汽車網絡架構簡述
傳統汽車網絡架構主要由控制器局域網(Contriller Area Network,CAN)、可變數據的控制器局域網(CAN with Flexible Data-Rate,CAN-FD)等各類總線[4]以特定的車內通信協議規則和消息格式,控制車內各電子控制單元網絡節點(Electronic Control Unit,ECU)進行統一通信。按照傳輸類型的差異性,傳統汽車網絡的車載總線可分為5 種類型。不同類型車載總線的特點和用途如表1 所示。
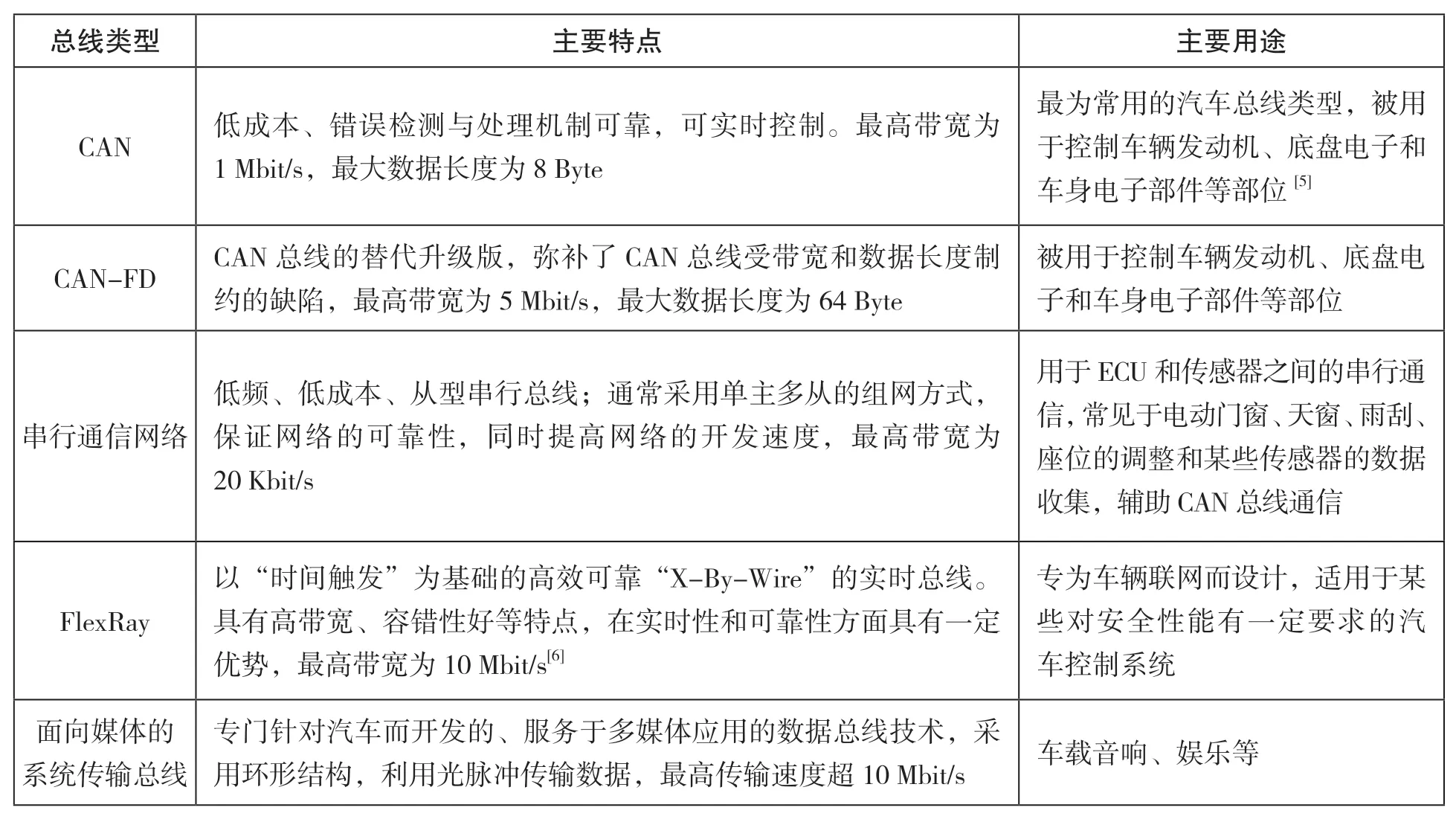
表1 傳統汽車網絡的車載總線類型對比
2 智能網聯汽車網絡架構探討
智能網聯汽車具備智能化和網聯化特點,需要強大的通信網絡支撐車輛通信,具體包括利用車載網絡開展車輛內部通信和利用無線技術開展車輛同外界的通信(Vehicle to Everything,V2X)。其中,前一類通信目前多基于車載以太網技術。
2.1 車載以太網應用分析
區別于傳統汽車網絡架構,智能網聯汽車的首要目標不僅是保障車輛自身網絡通暢,還需要確保任一路段的所有車輛、車輛與道路基礎設施及云服務平臺實現有效聯網,確保信息能夠按照一定規則進行交換,并且保證極低的通信時延和極高的可靠性。此外,智能網聯汽車還需要確保網絡具備一定的獨立性,即確保在偏遠地區、網絡基礎設施覆蓋不完善的地區也可以具備一定程度的聯網功能。為了確保上述智能網聯汽車駕駛目標得以實現,車載以太網[7](Automotive Ethernet)方案隨之誕生。
初始車載以太網采用帶有屏蔽層的低電壓差分信號(Low Voltage Differential Signaling,LVDS)線纜。LVDS 采用極低的電壓擺幅提供高數據傳輸率,可以實現單點對單點或單點對多點的連接,具備低功耗、低誤碼率、低串擾和低輻射等特點。盡管LVDS 線纜可滿足汽車行駛等環境下的使用要求,但是其自身所依賴的厚重屏蔽層限制了其在汽車狹小布線空間的運用,同時LVDS 線纜的連接器也較其他線纜復雜,這對車載以太網提出了更高的要求。
當下的車載以太網解決方案,主要是由博通公司發明的BroadR-Reach 以太網技術。BroadR-Reach 采用了單對非屏蔽雙絞線電纜和標準以太網物理層組件來實現100 Mbit/s 速率的數據傳輸,同時BroadR-Reach 基于特殊編碼方式,將傳統以太網的125 MHz 基準頻率變為66.67 MHz,進而改善信號抗電磁干擾(Electro Magnetic Interference,EMI)、射頻干擾(Radio Frequency Interference,RFI)等特性。該技術允許多種車內系統同時通過單對非屏蔽雙絞線存取信息,由于采用非屏蔽線纜,基于BroadR-Reach 以太網技術的車載網絡互聯成本可降低約80%,線纜重量則較傳統的LVDS 線纜重量降低了30%。
從協議層面來看,在傳統以太網基礎上,車載以太網的協議在物理層方面有著巨大的改變。BroadR-Reach 在物理層面引入了100BASE-T1、1000BASE-T1 重大技術,打破了車載以太網技術壁壘,使以太網適應汽車高速聯網的電子要求。其中,100BASE-T1 是指通過一對非屏蔽雙絞線可實現100 Mbit/s 的全雙工數據傳輸,傳輸頻率為66.67 MHz;1000BASE-T1 的傳輸頻率為750 MHz。此外,車載以太網還使用了包含基于車載以太網的診斷(Diagnostic communication over Internet Protocol,DoIP)、通過網絡提供面向服務的通信(Scalable Service-Oriented Middleware over IP,SOME/IP)和傳輸控制協議(Transmission Control Protocol,TCP)等。
2.2 對V2X 通信協議的分析
V2X 是智能網聯汽車網絡架構的重要組成部分,也是智能網聯汽車信息交互占比最大的部分,包括了車與周邊環境和網絡的一切通信。具體來講,主要分為車與其他車輛(Vehicle to Vehicle,V2V)、車與行進過程中的基礎服務設施(Vehicle to Infrastructure,V2I)、車與周圍行人(Vehicle to Pedestrian,V2P)、車與其他網絡(Vehicle to Network,V2N)的信息交互等,同時車內主要依據車載遠程信息處理器(Telematics BOX,T-BOX)實現各類指令和信息的傳遞。智能網聯汽車通過各類V2X 通信,整合了北斗、全球定位系統(Global Positioning System,GPS)等定位導航系統,連接了車與車、車與車聯網絡服務平臺、車與基站,實現汽車從傳統機械化動力設備向現代信息化智能設備的轉變[8],通過V2X 交互的信息可以包括基礎安全信息,如車輛或行人的位置、移動速度、移動方向等,以輔助其他車輛或實體判斷是否存在安全隱患;也可以包括采集到的傳感器信息,如車輛將通過攝像頭或雷達采集到的周圍環境的信息發送給其他的車輛或行人,從而使得其他的車輛或行人獲得更多的道路交通狀況信息,以提高道路安全性。
智能網聯汽車的V2X 通信應用場景異常復雜,包括道路安全、城市交通和信息服務等,此外面向未來還需兼容自動駕駛等復雜場景,例如,在上述應用中,道路安全應用場景主要對通信性能提出低時延、高可靠的要求;城市交通對其提出高頻度、高傳輸范圍、高傳輸速率等要求;信息服務則提出大帶寬的要求。此外,在智能網聯汽車實際工作期間,車輛的高度運動會帶來多普勒頻移、環境復雜變化等問題,這對高密度、單對多、多對多的V2X 通信提出了更高的要求。常見的無線通信的實現方式主要包括無線電、廣播、蜂窩式網絡(Cellular)、專用短程通信(Dedicated Short-Range Communication,DSRC)等。當前,用于V2X 通信的主要有2 種技術體系[9],一種是基于DSRC 的DSRC-V2X 技術體系,另一種是基于蜂窩網絡的Cellular-V2X(C-V2X)技術體系。
DSRC 車載通信標準起源于IEEE 802.11 無線局域網(Wireless Local Area Networks,WLAN)標準,并被重新命名為IEEE 802.11p。在IEEE 802.11p 協議標準完善穩定后,IEEE 又推出了1609.x 系列協議標準,作為DSRC-V2X 的配套安全框架。當前,基于DSRC 的V2X 通信依據標準IEEE 802.11p 在物理層和接入層上提供無線接入,網絡層則依據標準IEEE 1609.x,定義了多信道操作、網絡服務以及各通信實體安全等,其主要工作頻段有800~900 MHz、2.4 GHz(藍牙、Zigbee)和5.8 GHz(Wi-Fi)3 類頻段,其主要技術特點如表2 所示。從國際上來看,DSRC 主要技術標準化體系包括歐洲主導的CEN/TC278、美國主導的ASTM/IEEE 和日本主導的ISO/TC204,DSRC-V2X 也主要由歐美國家主導力推。

表2 常見車載無線通信技術特點
區別于基于WLAN 的DSRC-V2X 技術,以中國為主要代表的國家推出了C-V2X 技術體系,美國聯邦通信委員會也于2019年將部分已分配給IEEE 802.11p 的5.9 GHz 頻譜重新劃出一部分分配給C-V2X,這意味著美國對C-V2X 持積極態度。C-V2X 與生活中常用的手機移動網絡(蜂窩網絡)一樣,都是依據第三代合作伙伴計劃統一標準的通信技術,并且基于4G、5G 等形成車用無線通信技術。此外,C-V2X 又可細分為基于4G 的LTE-V2X 以及基于5G 的5G-V2X 進行數據傳輸。相較于DSRC-V2X,C-V2X 主要有以下3 方面優勢:一是DSRC-V2X 需要所有終端安裝收發模塊方可進行點對點直連通信,而C-V2X 可同時實現直連與非直連2 種通信方式,即車輛在實現與其他車輛或基礎設施點對點直連通信的基礎上,還可以通過蜂窩網絡與其他交通實體進行信息交互;二是4G、5G 等信息基礎設施發展完備,有利于推動C-V2X 技術落地;三是C-V2X 的通信范圍更廣,且蜂窩網絡芯片價格低于WLAN 芯片,綜合部署成本更低。但目前基于蜂窩網絡的通信也需要技術創新,以更好地服務多對多、高頻度、高隨機等車與車通信場景。C-V2X 與DSRC-V2X 的主要技術對比如表3 所示。
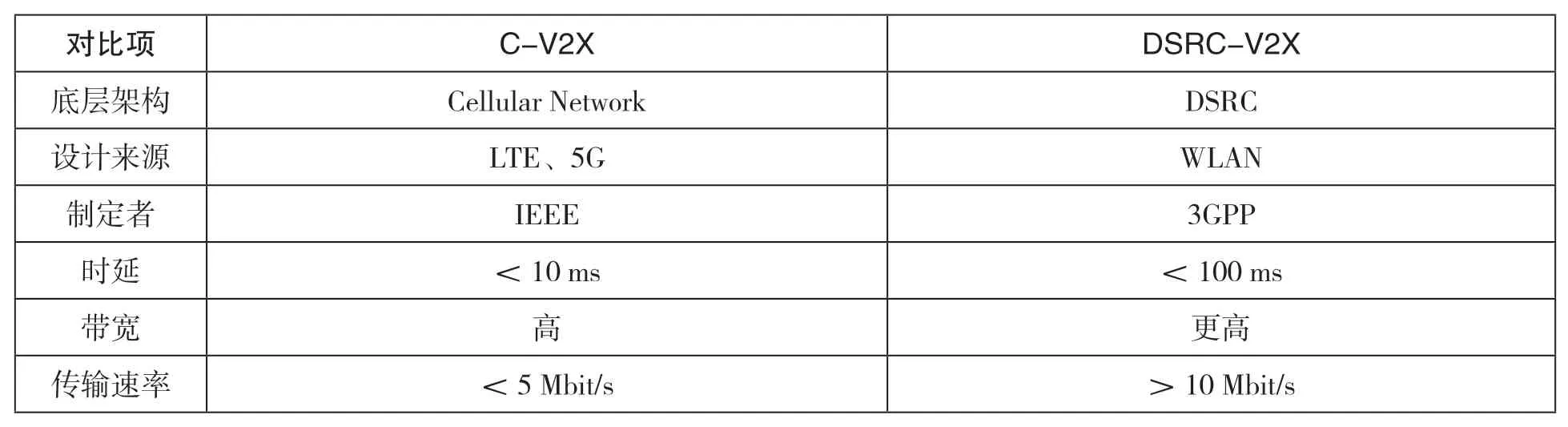
表3 C-V2X 與DSRC-V2X 技術對比
2.3 對V2X 通信架構及典型場景應用的分析
無論基于C-V2X 還是基于DSRC-V2X,V2X 的最終目的都是實現車輛和其他車輛、路、人、云服務平臺的信息交互。其完整通信架構如圖1 所示。
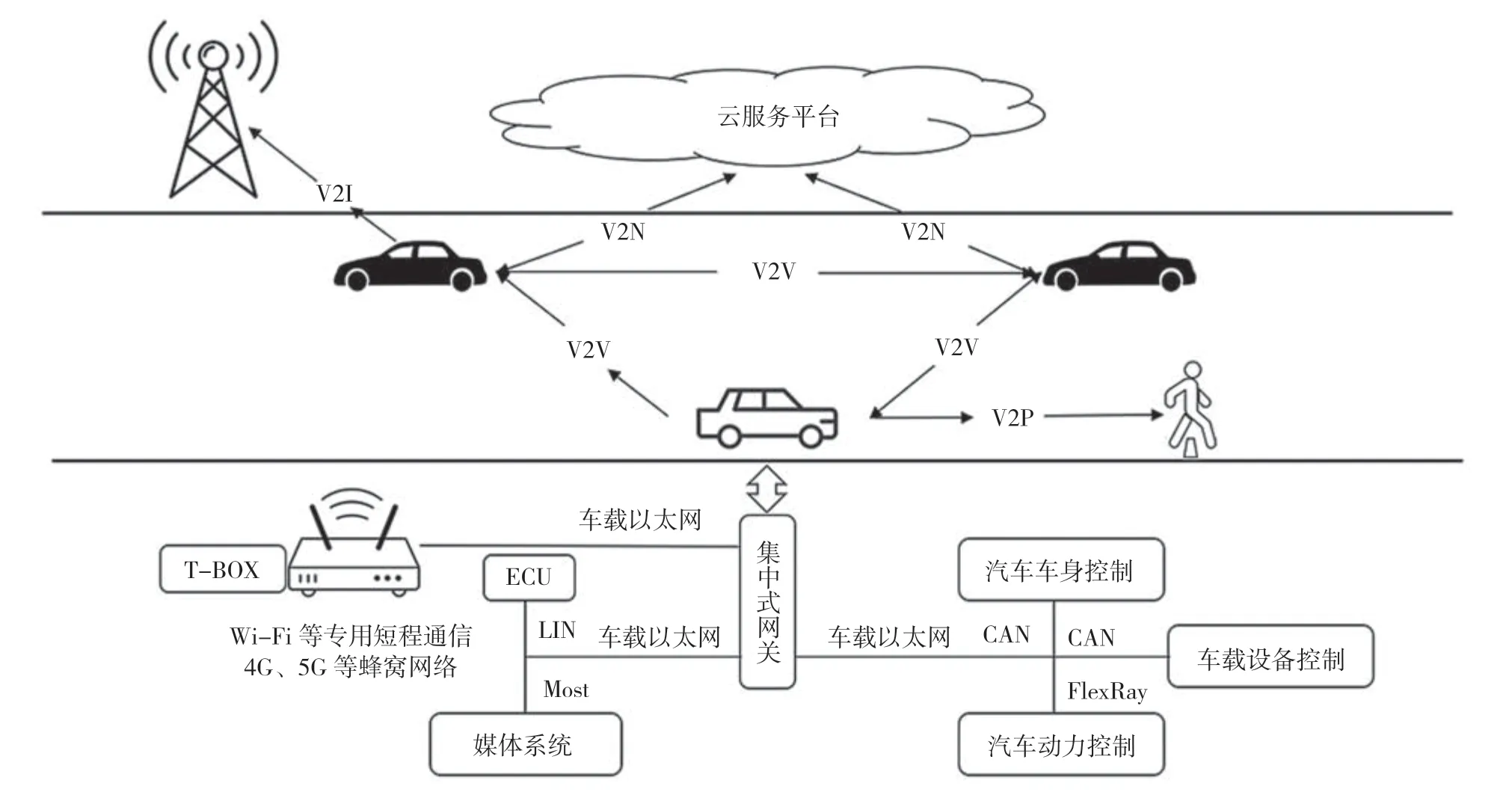
圖1 V2X 通信架構
在實際通信過程中,根據不同的應用場景,對智能網聯汽車各網絡的運行指標,如時延、數據更新頻率等有著不同的要求。在實際運行過程中,根據汽車工程學會發布的《合作式智能運輸系統 車用通信系統 應用層及應用數據交互標準》,將通信網絡運行指標大致劃分為交通安全、交通效率、交通管理和信息服務等不同類別[10]。其具體網絡運行指標要求如表4所示。
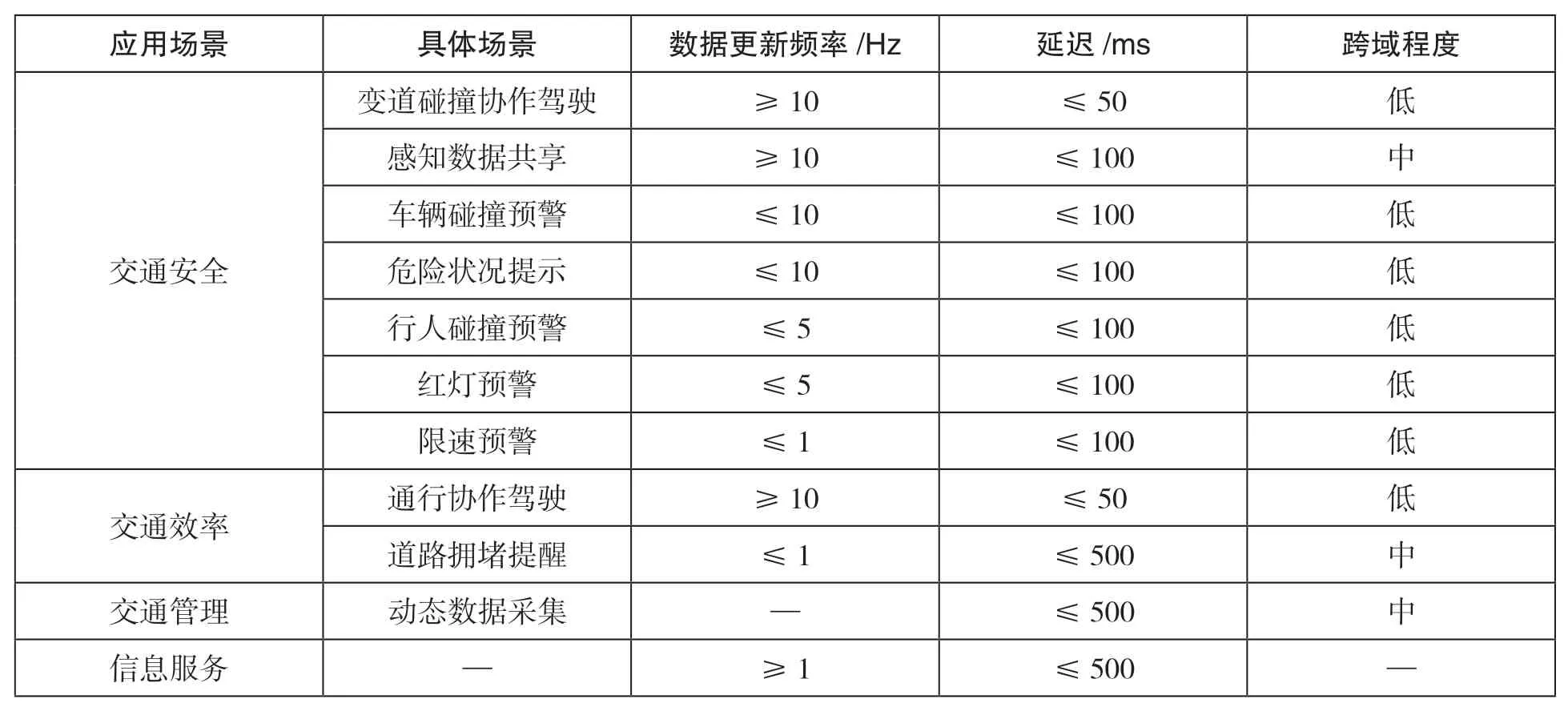
表4 V2X 通信網絡運行指標
3 智能網聯汽車網絡安全風險及檢測方法
3.1 風險分析
智能網聯汽車較傳統汽車最大的網絡安全風險點在于各類網絡的互聯互通導致汽車內部的通信網絡被暴露在其他外部網絡中,故針對智能網聯汽車的網絡攻擊可從任意網絡層面發起,如直接連接感知層系統軟件或接口自下而上發起攻擊;也可從應用層自上而下發起攻擊,如利用漏洞竊取認證信息,入侵遠端云服務平臺,遠程操控汽車等。此外,黑客可以通過電動汽車充電樁的充電電纜,實現對連接到同一網絡下充電樁的任意車輛發起攻擊[11],或通過OBDII 端口、CD 播放器、USB 等入口點訪問車載網絡并注入攻擊報文[12],或利用受安全加固的Wi-Fi 發起拒絕服務(Denial of Service,DoS)攻擊[13],或將汽車連接到惡意Wi-Fi 熱點上并加以控制[14]。相對而言,傳統汽車遭受的網絡攻擊大多局限在傳感器層面[15]。智能網聯汽車常見網絡攻擊類型如表5 所示。
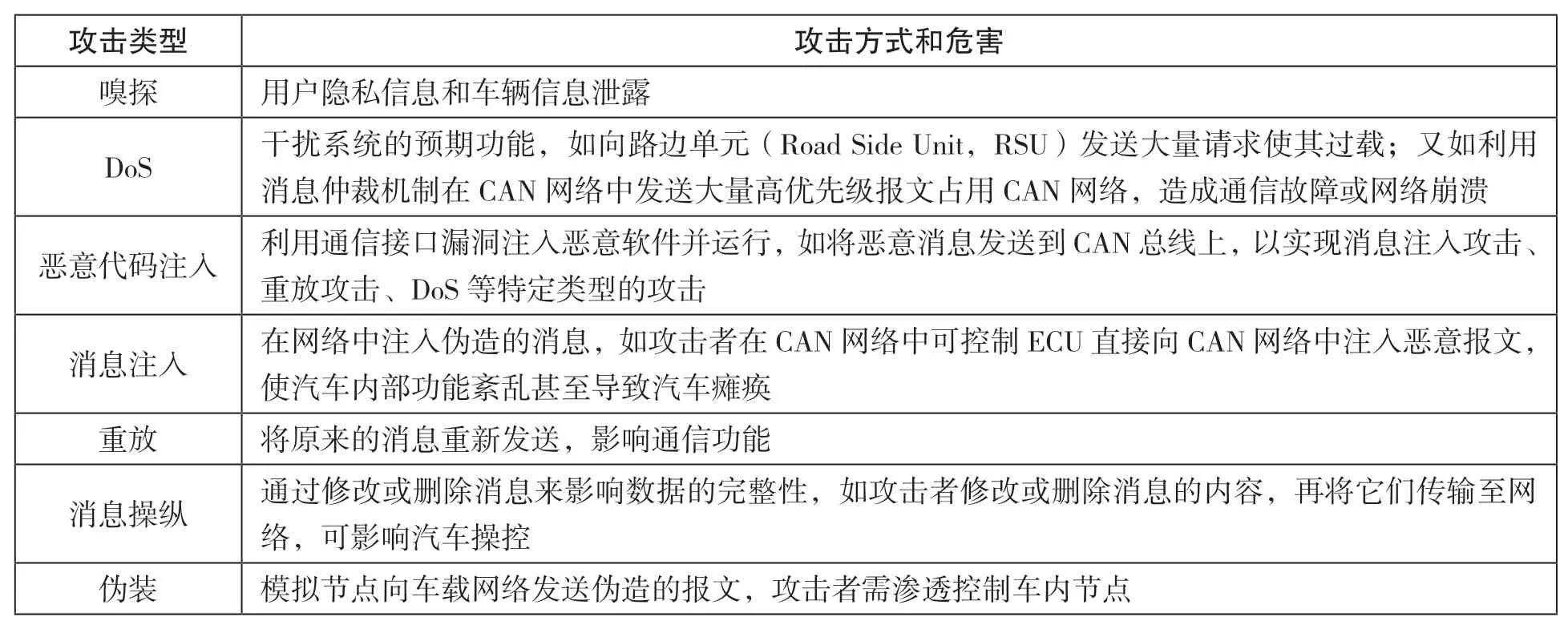
表5 智能網聯汽車常見網絡攻擊類型
3.2 基于生成對抗網絡的智能網聯汽車CAN網絡實時檢測
實時檢測主要針對車內網絡CAN 總線,主要基于以下3 方面考慮:一是車內網絡是智能網聯汽車的基石底座,車內網絡的數據交互承載著車輛最基本的動力功能;二是盡管車載以太網等新型網絡體系在智能網聯汽車已得到廣泛應用,但CAN 總線仍被廣泛應用于汽車傳動系統和車身控制領域,連接著與汽車運動行為相關的關鍵功能部件,在車輛動力總成、保障車輛安全行駛方面具有不可替代的作用[16];三是CAN 作為最基本的車內網絡總線之一,在設計之初并未考慮網絡攻擊的威脅,疊加CAN 總線協議本身的固有缺陷,使得CAN 總線難以應對智能網聯汽車的復雜安全威脅[17]。CAN 總線協議的固有缺陷如表6 所示,對其發起攻擊的方式和危害可見表5。
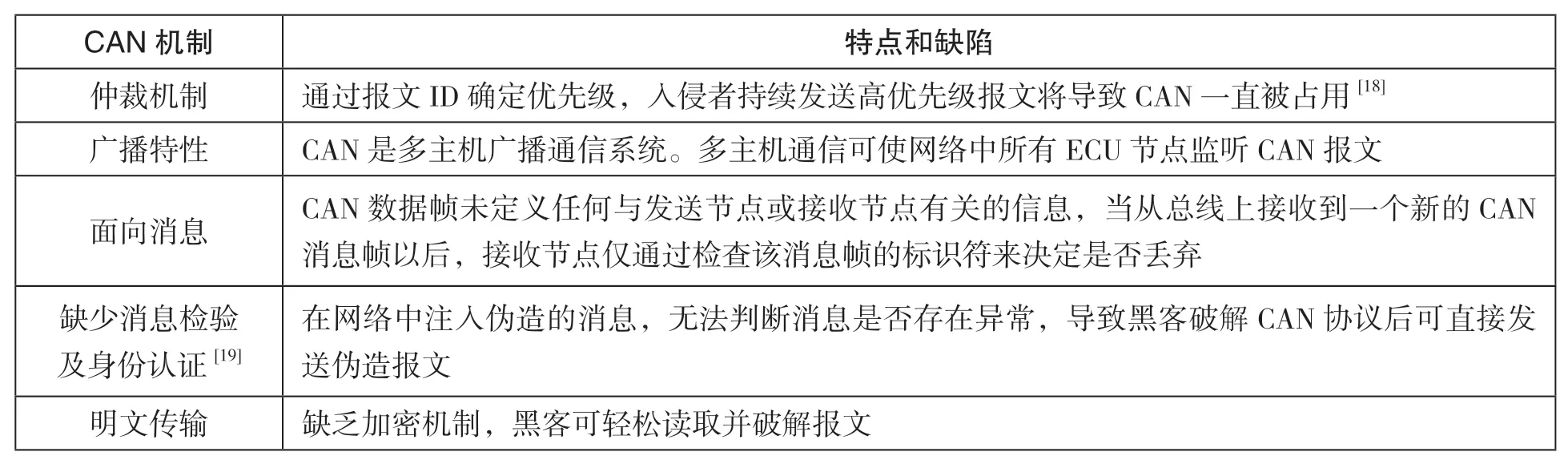
表6 CAN 總線協議特點及對應缺陷
生成對抗網絡(Generative Adversarial Network,GAN)是一種基于對抗學習的深度生成模型[20],常用于區分真實圖像和虛假圖像。基于GAN 開展CAN 檢測的基本原理是將CAN 數據轉化為圖像,其中正常CAN 數據轉化為真實圖像,摻雜攻擊數據的CAN 數據轉化為虛假圖像,利用GAN 模型將這兩種圖像加以區分,達到對攻擊數據的檢測效果。GAN模型的顯著優點在于模型訓練過程中,可自動生成隨機圖像用以代替攻擊圖像,可有效解決數據量不足的情況。GAN 模型如圖2 所示。

圖2 GAN 模型
在圖2 所示模型中,生成器G將隨機數據轉化為生成樣本(虛假圖像G(z)),并和真實圖像x一同輸入判決器,通過判決器D區分真實圖像和虛假圖像。上述模型可表示為:
式中:V為對抗損失函數;E為期望函數。式(1)所反映的基本邏輯為對判別器D而言,如果樣本為真實圖像,那么D會最大化其輸出值,即;如果樣本為虛假圖像,那么D會最小化其輸出值,即,也可以用來表述。
最終,判別器達到以下目標,即最大化判斷正確數據為正確、不正確數據為不正確。而對于生成器G而言,則要生成盡可能具有迷惑性的圖片,盡可能最小化判別值,以反過來促進判別器的判別能力,即。
GAN 模型在實車應用中主要按照如圖3 所示的邏輯裝配,通過將訓練好的檢測模型嵌入智能網聯汽車網絡體系中,實現對車內CAN 網絡的實時檢測,該模型可實現對重放、惡意代碼注入、嗅探、DoS 等網絡攻擊的檢測。在實際部署過程中,由于GAN 模型所需要的計算量較大,智能網聯汽車自身往往無法提供充足的計算資源以保證對異常數據實時檢測,通常可結合C-V2X 網絡體系,將CAN 網絡檢測模型部署在邊緣計算平臺,通過云化形式實現實時檢測。
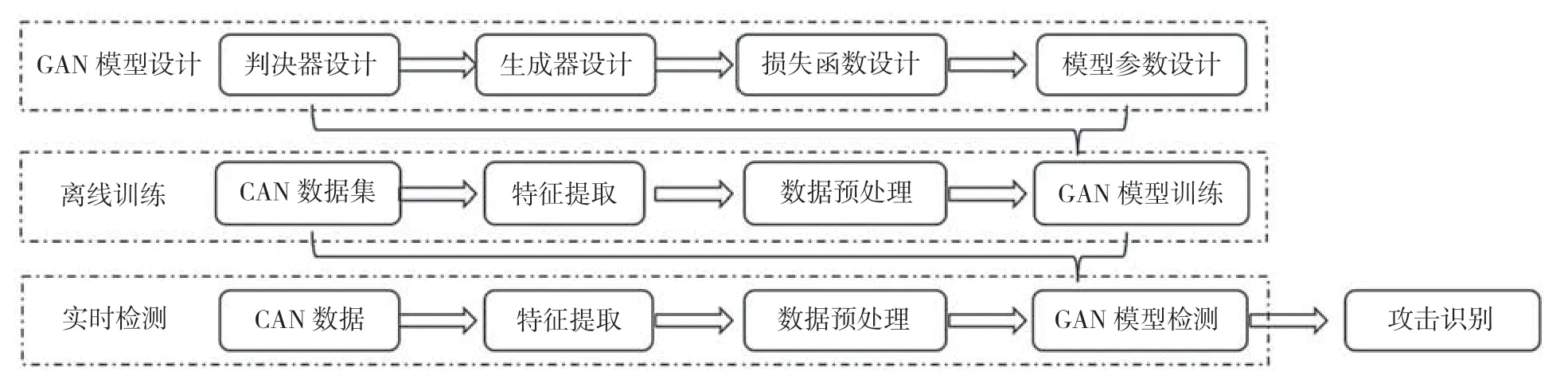
圖3 基于GAN 的智能網聯汽車CAN 網絡檢測模型
4 結 語
近年來,智能網聯汽車的發展越來越迅速,對車的安全性要求也越來越高。本文詳細介紹了智能網聯汽車的網絡體系架構,特別是底層網絡架構,如車載以太網、DSRC-V2X、C-V2X等,此外,還提出現有網絡體系架構下的聯網汽車所面臨的攻擊風險。基于密切關聯汽車基本功能的CAN 網絡,設計一種實時檢測模型,以提高智能網聯汽車在實際行駛過程中的安全性,該模型可進一步對車載以太網等網絡進行檢測。未來,在各類電信基礎設施不斷完善和城市邊緣算力、車載計算能力進一步提升的情況下,DSRC-V2X、C-V2X 等豐富場景下的通信安全,可嘗試利用相關人工智能模型開展實時安全檢測,在提高交通效率的同時提升交通安全和隱私保護能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
作文大王·低年級(2016年4期)2016-04-18 00:24:37