鐵路平交道口智能集控預警系統
2024-03-26 09:00:10武恒頡周靈鈺
鐵路通信信號工程技術 2024年3期
周 帥,周 培,武恒頡,周靈鈺
(南京鐵道職業技術學院,南京 210056)
1 概述
鐵路道口是鐵路和公路的一個交匯處,其中道口欄木起降時間不合理、行人盲目強行侵入道口等是造成各類事故的主要原因。如今尚不能把所有平交道口立交化。而傳統的鐵路管理模式,即由班組負責值守的方式,主要用于處理人流和車流量密集的關鍵路口,這種方式不僅效率較低,且成本高昂,同時還存在潛在的安全風險。雖然近年來,針對專用鐵路線的安全工作已經取得顯著進步,安全狀況也在不斷改善。但是鐵路安全工作仍然面臨著巨大挑戰。
相較于傳統道口預警實現方案,本系統在道口攔截部分設計上選擇使用無線射頻通信技術,當列車觸發來車傳感器時,由預警分機向道口預警主機發出預到達信號,主機迅速算出關閉道口的恰當時間,實現預警;列車通過離去傳感器后,預警主機馬上解除報警,并打開道口讓道路車輛通行。在道口監控部分設計上選擇使用車輛與行人目標識別技術,并依靠車地的相互通信,將道口視頻傳輸至列車駕駛室,使列車司機能實時掌握即將通過道口的情況。鐵路道口的集中控制將傳統的道口現場人工管理轉變為全自動的遠程管理,這可以大大減少道口值班人員的數量,從而帶來顯著的經濟效益。另外,遠程集中控制在鐵路道口的應用也帶來了新的管理形態,通過對鐵路道口的運輸作業流程改革,進一步提高其管理效率,將傳統的人工觀察和操作方式轉變為“遠程可觀測和操控的無人監控”模式。
2 預警系統設計
如圖1 所示,該系統結合多傳感器技術、現代化的通信手段以及視頻監控技術,目的是為全方位地自動化管理并實時監控鐵路無人道口。該系統主要包括4 個核心組成部分:分別是列車上/下行傳感器、無線預警分機、道口預警主機以及車地聯動視頻監控。
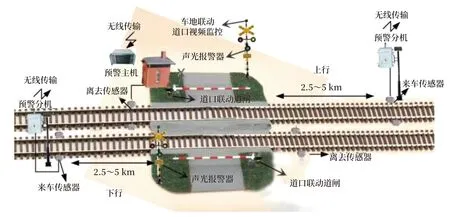
圖1 道口預警系統原理示意Fig.1 Schematic diagram of principles of crossing early warning system
列車上/下行傳感器的主要功能是捕捉列車距離鐵路道口的數據,其設計包括在距離道口大約3 km 的列車上行方向分別設置兩個來車傳感器,在道口旁列車下行方向分別設置兩個離去傳感器,這些傳感器呈十字形布局在規定的鐵路安全距離內。這種配置不僅可以獲取列車的行進方向和通過速度等關鍵信息,還可以識別潛在的干擾因素。
預警分機的主要功能是將傳感器捕捉到的列車經過信息,通過無線信號處理器處理后,發送至道口預警主機,從而實現是否存在列車靠近的信息傳遞。
預警主機的主要功能是在收到來自預警分機的列車接近通知后,自動降低道口聯動道閘,以防止行人與車輛通行。同時,它還會啟動道口聲光報警器來提醒行人及車輛注意安全。一旦接收到列車離去的信息,道閘就會重新升起,信號燈變為綠色,向行人及車輛傳達出道口已經安全的信息,允許繼續通行。
車地聯動道口視頻監控的主要功能是對道口通行車輛和行人信息進行識別,并實時的將道口交通狀態傳輸至列車駕駛室和鐵路交通管控部門,以實現車-地的相互通信,使列車司機能實時掌握即將通過道口的情況。當系統設備故障時,鐵路交通管控部門可立即派設備維護人員趕往現場進行維修,并且對于闖卡、違規調頭、超速等危險行為進行自動抓拍、記錄,由鐵路交通管控部門審核之后交由交通管理部門依法進行處罰。
無人化道口預警集控系統流程如圖2 所示。
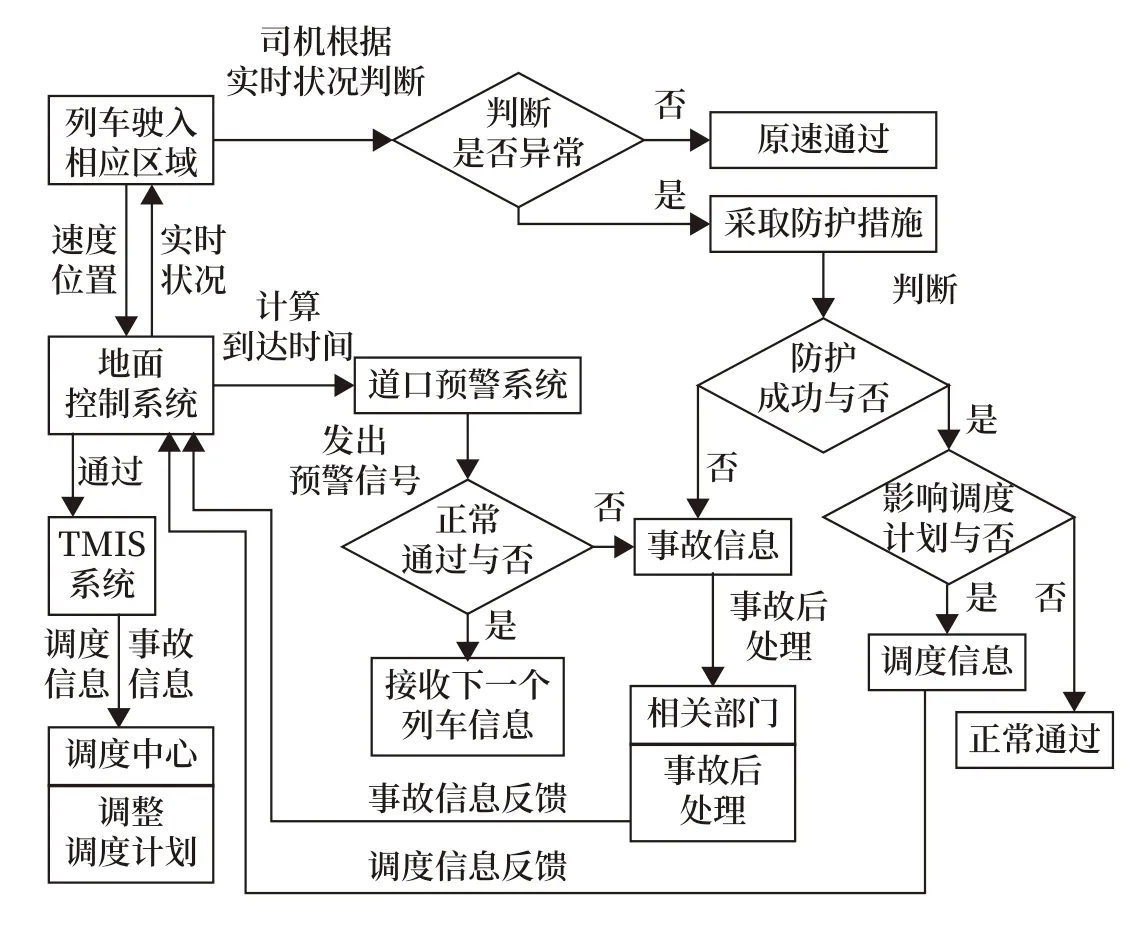
圖2 無人化道口預警集控系統流程Fig.2 Flowchart of centralized control system for early warning of unmanned level crossing
3 預警系統設備設計
本文中設計的道口預警系統中最重要的設備是預警分機、預警主機及視頻監控。在設計中,預警分機、預警主機與視頻監控通過配置進行區分,故在介紹其設計時統稱為道口預警設備。道口預警設備分為主控板和功率板兩部分,整體設計框如圖3所示。

圖3 道口預警設備設計框Fig.3 Block diagram of equipment design of crossing early warning
3.1 道口預警設備主控板設計
道口預警設備主控板主要包括微控制器模塊、LoRa 通信模塊、列車傳感器、RS-485 串口模塊、數據存儲模塊、圖像采集模塊、4G 圖傳模塊和電源模塊等。
微控制器模塊主要采用通用型STM32F103ZET6,每臺設備各一片,分管數據采集和數據通信功能,兼具低成本和低功耗兩個優勢。
列車來車傳感器和列車離去傳感器,主要是采用激光對射傳感器,將列車行車信息轉化為電平信號傳入微控制器。微控制器根據不同的電平信號運行對應的指令,而其中的通用定時器則可以對捕獲到的兩次電平信號的時間進行比較,從而計算出列車經過道口時的區間速度。
RS-485 串口模塊作為常用的制式工業通用接口,為預警主機和預警分機保留額外功能擴展或數據交互的可能,并且可以通過外部的燒錄裝置重新為其下載新的程序,保留其本地更新功能。
數據存儲模塊選用一款可通過USB-SPI 訪問的存儲芯片,用于存儲道口視頻和下載供OpenMV使用的車輛或行人識別卷積神經網絡模型。
圖像采集模塊主要是采用OpenMV,其搭載了MicroPython 解釋器,使其可以在嵌入式端進行本地python 開發,并且將OpenCV 訓練后的卷積神經網絡模型通過數據存儲模塊存入本地數據集中,在圖像識別中便于進行本地模型的調用。OpenMV進行圖像識別的原理大致如下:首先利用OpenCV對含有車輛或行人的正負樣本數據集進行訓練,生成只可供OpenCV 調用的cascade.xml 分類器,再將xml 格式的文件通過python 轉換成cascade格式的可供OpenMV 識別的文件,后將生成的可識別格式文件導入OpenMV 即可進行圖像識別。
圖像識別流程如圖4 所示。其對于列車道口行車風險等級判斷的原理是:首先根據道口的警示位置將圖像的像素坐標劃分低風險區和高風險區,由OpenMV 將采集到的圖像中的車輛或行人圖像進行預處理,經過灰度處理后,形成大小統一的圖像。按照行人或車輛邊界擬出相對貼合的線性矩形,并由微處理器計算線性矩形的中心坐標。當中心坐標位于低風險區或高風險區時,即視為闖卡、翻越、調頭等交通違規行為。

圖4 道口預警圖像識別流程Fig.4 Image recognition process of crossing early warning
4G 圖傳模塊主要是用于將OpenMV 處理后的已標注圖像數據,傳輸至列車駕駛室和鐵路交通管控部門。此視頻信息采集系統為管理者提供詳細且全面的記錄,不僅可以追蹤運動目標,獲取經過道口的車輛的速度、車牌、狀態,還增加區域監測和劃定的區域框,可以對鐵路道口的車輛超速、違規掉頭、闖卡等行為進行智能視覺識別,將違規車輛的信息上傳到交通控制平臺。此外,它還可以通過管理服務器實現多道口的聯合管理,為多道口聯動道口預警控制提供可靠的技術保障,構建無人值守的鐵路道口遠程集控管理系統。
電源模塊主要包括主控板電源產生和自檢以及外置蓄電池信息的采集。主控板電源主要依靠線性減壓芯片產生,滿足板上各芯片的各級電壓需求,同時運用分壓原理實現自檢。外置蓄電池配有專用電源管理模塊,其信息可通過RS-485 通信讀取。
3.2 道口預警設備功率板設計
功率板主要包括天線、LoRa 芯片、射頻前端模塊和電源管理模塊等。
天線選擇科信無線的433 MHz 吸盤天線,主要參數如表1 所示。在通信系統中,增益的強弱將影響到天線的輻射能力或接收無線信號的能力。一般情況下,增益越高,無線信號的傳播距離越遠。因此,為了提升預警無線模塊的通信距離,選擇使用外置全向高增益高增益的吸盤天線,此類型的天線具有較高的增益,能夠增強無線信號的傳輸和接收能力,從而提升預警系統通信距離。

表1 科信無線433 MHz吸盤天線參數Tab.1 Parameters of Kexin 433 MHz wireless suction cup antenna
LoRa 通信芯片選用美國SEMTECH 的SX126X芯片,主要參數如表2 所示。LoRa 通信模塊用于傳輸列車傳感器收集到的信息。許多傳統的無線通信系統使用頻移鍵控(FSK)調制作為物理層,因為它是一種實現低功耗的非常有效的調制。但是在鐵路系統中,雷達設備與電臺通信設備均會對物理層FSK 產生巨大的干擾,而 LoRa 是一種基于線性調頻擴頻調制的通信技術,它具有類似FSK 調制的低功耗特性,但在通信距離上具有顯著的提升。線性擴頻技術已在軍事領域和空間通信領域使用了數十年,由于其可以實現長通信距離和抗干擾的魯棒性。而LoRa 則是第一個將這種技術用于商業用途的低成本實現方式,可以極大地減弱鐵路設備對于道口預警系統的信號干擾。

表2 SX126X芯片參數Tab.2 Parameters of SX126X chip
射頻前端模塊是指連接LoRa 通信芯片和天線之間的電路和模塊。它負責將數字信號轉換為適合傳輸的無線信號,提供必要的放大、濾波和調制等功能,并直接影響著預警系統的整體信號質量、傳輸速率和功耗等性能指標。運算放大器和混頻器是射頻前端的核心組件,主要功能是將數字信號轉換為無線信號,并將接收到的無線信號轉換為數字信號。濾波器在射頻前端中起到關鍵作用,用于去除不需要的頻率分量,保留所需的信號。功率放大器是射頻前端中的重要組成部分,用于增強發送信號的功率,以便在預警信息傳輸過程中能夠達到2.5 ~5 km 距離的覆蓋。
電源管理模塊選用德國西門子的6EP1332-2BA20 開關電源,主要參數如表3 所示。由于預警系統對于無線通信的實時性與穩定性要求較高,因而需要經常使用開關電源來進行電壓的變壓處理。開關電源主要通過AC/DC 變壓穩壓器,對獲得的電壓進行降壓、穩壓,以保持電壓的穩定性,進而有效控制電壓振動波形,確保無線通信設備的有效運行和功能的正常發揮。

表3 西門子6EP1332-2BA20開關電源參數Tab.3 Parameters of Siemens 6EP1332-2BA20 switching power supply
4 實驗驗證
為驗證道口預警系統功能正確性及完整性,對該系統的控制響應時間、狀態反饋時間、斷網重連時效、識別準確率、運行功率以及通信穩定性等主要性能進行試驗,測試結果如表4、5 所示。并在南京浦鎮中車試車線上進行封閉區段的樣機測試,并接入道口交通信號燈、道口攔木機、道口壓道鈴、車地聯動道口視頻監控等設備,如圖5 所示。
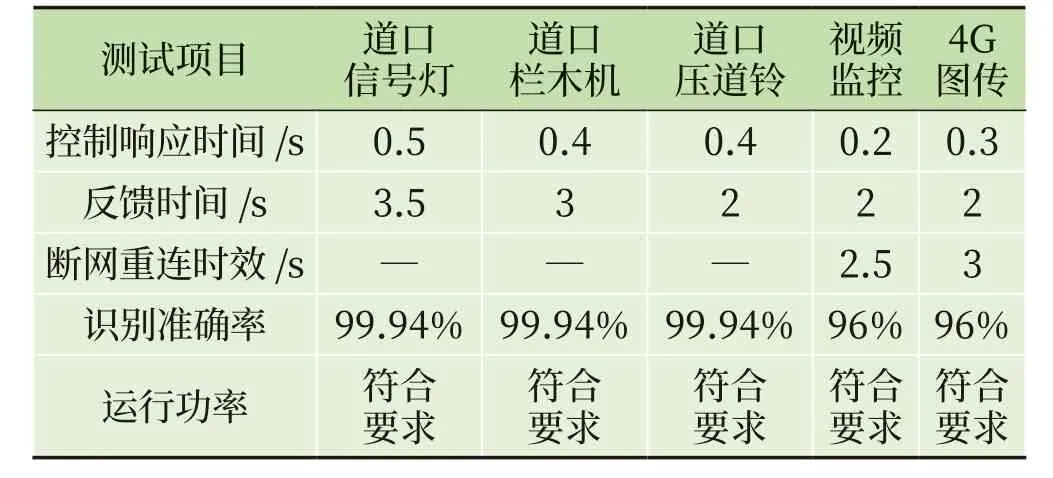
表4 性能可靠性測試結果Tab.4 Results of performance reliability test

表5 通信穩定性測試結果Tab.5 Results of communication stability test

圖5 道口預警系統信息可視化平臺Fig.5 Information visualization platform of crossing early warning system
通信穩定性測試的關鍵是預警分機微處理器、預警主機微處理器和OpenMV 微處理器的外部輸入和內部輸出監測。其主要通過PC 對串口的數據模擬,包括對OpenMV 的識別輸出點位AI、列車上/下行傳感器對預警分機微處理器的輸入點位DI 和預警主機微控制器輸出至外接設備的輸出點位DO。
測試結果表明:該系統的穩定性、可靠性均達到了預期的指標。通過使用LoRa 無線通信技術提高鐵路道口預警效率,給鐵路交通管理部門提供更穩定管理方案和更便捷的后期維修方式,提高運行維護水平。并且預警系統設備可根據列車行駛位置實行自動化控制,智能視覺監控亦可與車載監控設備聯動、協同作業,以實現智能化、自動化設備運行的需要。同時可以極大地提升鐵路系統的運營效率,降低鐵路道口的事故發生率。
5 結語
結合當前鐵路平交道口區域人工預警時效性低、路改橋施工成本高以及維護成本高等問題進行分析,以LoRa 無線通信為基礎,設計出一套鐵路道口預警系統,很好地解決上述問題。最后通過實際應用測試證明,該系統便于管理,節省運維人力,且其智能化、自動化理念符合智慧鐵路的設計要求。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
中國特種設備安全(2022年6期)2022-09-20 02:52:28
云南畫報(2021年12期)2021-03-08 00:50:54
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
鐵道通信信號(2018年7期)2018-08-29 01:17:04
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46
中國火炬(2015年7期)2015-07-31 17:40:05