基于人工智能的居家老人監護系統的設計與實現
2024-03-28 07:10:56劉映群黃嘉源李泳智何梓嶸楊佳穎
傳感器世界 2024年1期
劉映群,黃嘉源,李泳智,何梓嶸,楊佳穎
1.廣東開放大學(廣東理工職業學院),廣東廣州 510091
2.廣州理工學院,廣東廣州 510540
3.廣州城市理工學院,廣東廣州 510800
4.廣東技術師范大學,廣東廣州 524094
5.湛江科技學院,廣東湛江 524094
0 引言
人口老齡化作為“百年未有之大變局”在人口年齡結構上的具體表現,目前已成為中國等大多數國家的基本國情。《國家積極應對人口老齡化中長期規劃》明確提出“強化應對人口老齡化的科技創新能力”與“把技術創新作為積極應對人口老齡化的第一動力和戰略支撐”;黨的“十九大”報告提出“智慧養老”概念,這些都為物聯網、人工智能等帶來了發展的契機[1]。根據聯合國對老齡社會的定義標準,我國在2021 年就已經正式跨入老齡社會,必然會加劇監護人對老人監護不到位,缺乏對老人身體情況的掌握與老人情感需求不滿足等多方面的問題,在農村,實際居住人口老齡化程度可能進一步加深,而老人在獨居生活當中受到身體機能老化帶來的行動不便、記憶力衰退等影響,容易存在忘記吃藥、摔倒、體征數據異常等方面的問題。
現有的居家養老監護系統,如燕麗紅[2]提出的基于物聯網的智能居家養老看護系統,可實現老人居家狀況監控和報警功能,但缺乏對老人防摔倒的功能;李昌奇等人[3]提出的基于Android 和WiFi 的智能家居監控系統,通過STM32 主控連接所有傳感器模塊,影響到傳感器的檢測準確性與系統的效率,并同樣缺乏老人防摔倒功能。目前,防摔倒的方法有基于視覺的非接觸式設備與基于傳感器的接觸式設備,非接觸式如張曉華[4]提出的基于Jetson TX2 的老人跌倒監護與王鵬等人[5]提出的基于FPGA 的視頻監控摔倒檢測報警系統,都能夠無佩戴式監測跌倒異常,但存在當攝像頭受到光照、角度與遮擋物等多因素影響準確率的問題;接觸式如羅文志等人[6]提出的基于LoRa 的老人跌倒監護系統與蔣亞飛等人[7]提出的基于Arduino的智能摔倒監控報警系統,通過傳感器檢測,較好規避復雜視覺環境誤判老人摔倒的風險,但存在設備可能需要頻繁充電而老人經常忘記的問題。針對以上問題,本文提出監護機器人與智能手表的設計,兩種方式結合更為全面地監測老人狀態,降低誤判可能性,并開發移動端App,實時控制機器人與獲取手表檢測數據等,使系統支持遠程監控和控制,解決獨居老人的生活保障問題。
1 系統總體設計
系統組成主要包括移動端App、智能手表和機器人主體部分。在此系統中,移動端App 擁有語音控制、體征數據、場景控制、遠程視頻、報警信息提示與實時跟蹤等對機器人實時控制的功能;機器人主體則負責執行由App 下達的指令;智能手表通過搭載各類傳感器進行對老人體征數據的采集,并將采集到的體征數據傳輸至App。通過此系統,能夠達到對老人體征數據的遠程和實時監測、對機器人遠程控制協助監護的功能,以此實現對居家老人監護智能化、安全化的目的。系統設計總框圖如圖1 所示。

1.1 機器人主體設計
機器人主體由攝像頭、底層硬件控制板與移動輪組成,采用樹莓派4B 作為核心控制,燒錄樹莓派官方支持的Raspberry Pi OS 作為操作系統,并使用Python編程語言進行開發。Python 是一種面向對象的開源跨平臺設計語言,擁有各區域的代碼,如單元監測、圖像處理和操作系統接口等,可以通過調用這些代碼進行開發,以此來減少代碼冗長和縮短開發周期,還能將其他語言如C/C++等編寫的模塊代碼很輕松地整合到一起,便于開發[8-9]。
攝像頭:基于樹莓派系統來搭配攝像頭作為“眼睛”,搭載的二自由度攝像頭可通過攝像頭俯仰視180°、轉動云臺環視180°實現對場景進行多方位的監視,通過調用OpenCV(輕量級視覺的開放源代碼的API(Application Programming Interface,應用程序編程接口))函數庫來進行視覺處理,實現對目標識別、跟蹤和測量等功能的開發。
底層硬件控制板:將電機、陀螺儀與電池等外設與STM32 單片機連接控制,再將所有硬件配置全部封裝在底板中,最后通過串口通信使樹莓派4B 連接到STM32 單片機。至此,完成機器人主體的設計和通信連接。
1.2 智能手表設計
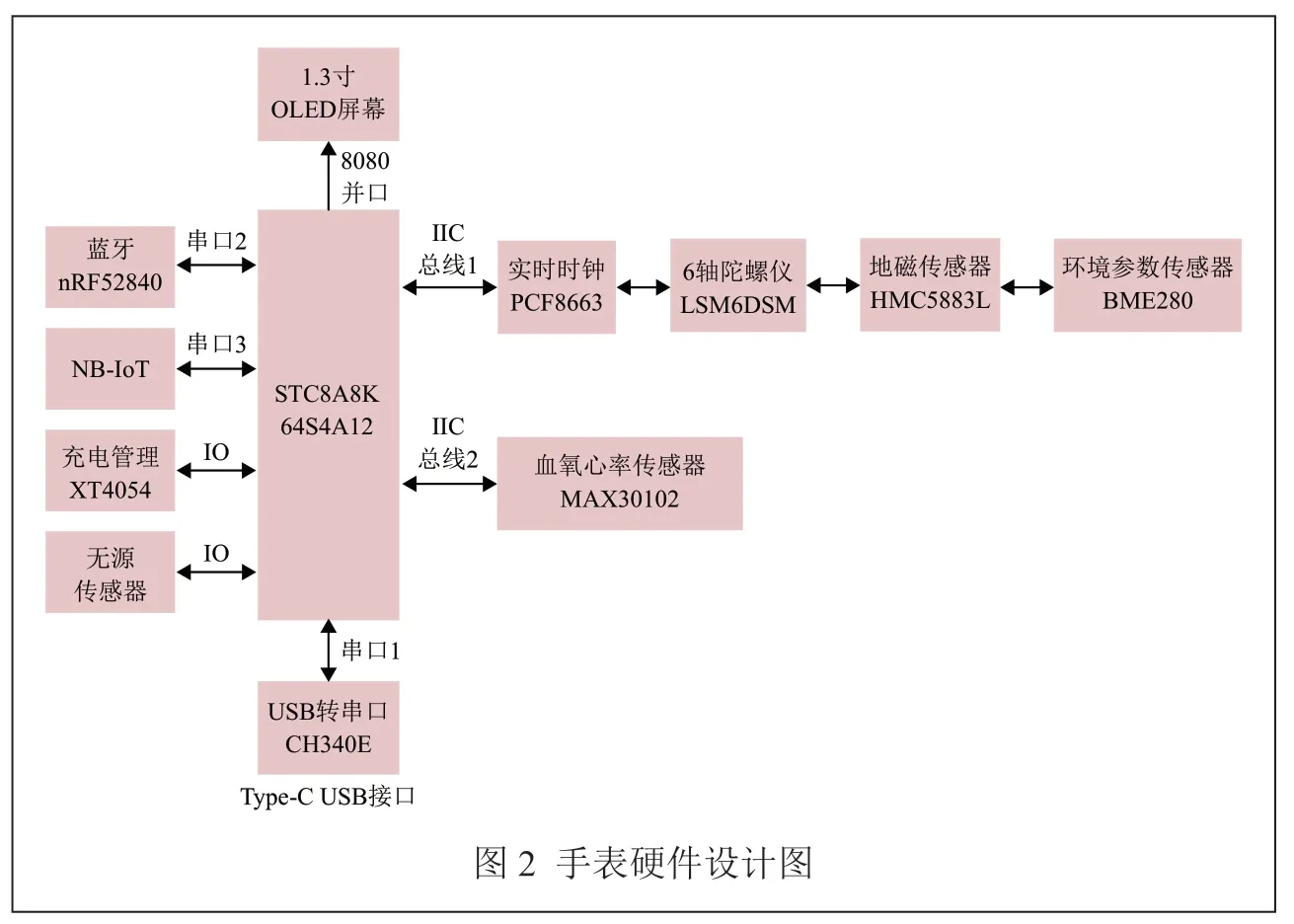
對于老人佩戴的手表來說,智能手表的操作簡單性和續航時間是比較重要的,而STC8A8K64SA12芯片的低功耗能夠極大提高手表的續航能力,4 個高速串口波特率時鐘源最快可為FOSC/4。此外,I2C(Inter-Integrated Circuit,集成電路總線)通信協議可支持主機模式和從機模式。通過STC8A8K64SA12 芯片搭配其他外設、模塊,可以滿足設計需求。佩戴智能手表監測設備可以測量多種體征,如心率、血氧與體溫等,同時可以實現跌倒行為監測[10]。
因此,智能手表的設計方案為:硬件核心采用STC8A8K64SA12 芯片,使用串口連接藍牙模塊、NBIoT(Narrow Band Internet of Things,窄帶物聯網)模塊,通過I2C 通信協議將實時時鐘PCF8563、血氧心率傳感器MAX30102模塊和陀螺儀等模塊與主控芯片通信。手表上搭載的體征數據傳感器和動作姿態(屏幕雙擊、抬腕喚醒)采集數據后,在室內模式可通過藍牙通信向機器人發送數據,在室外模式則通過NB-IoT 模塊將數據直接發送到云端服務器。手表硬件設計如圖2 所示。
2 系統硬件設計
2.1 機器人主體硬件設計
機器人主體通過搭載電機驅動模塊、攝像頭模塊、聲紋識別模塊、語音播報模塊、WiFi 模塊與藍牙模塊來實現移動、語音控制與對話、遠程視頻與實時跟蹤等功能。
電機驅動電路:采用FD6288芯片和搭建三線橋設計的STM32電機驅動擴展板,支持4 路編碼器直流電機,板載兩路5 V 電源,最大電流5 A,具有豐富的板載資源和擴展接口,非常適合和樹莓派這樣的ROS 主控組成ROS機器人。
攝像頭電路:OV2640 是一款CMOS 類型的數字圖像傳感器,具有高靈敏度、低電壓與小體積等優點,支持色度飽和度、色相、伽馬、銳度等設置,支持圖片壓縮,支持輸出JPEG 和RGB565 等格式的圖像數據。其中,SIO_C 與SIO_D 通信協議跟I2C 十分相似,且OV2640 的SCCB 特性與I2C 無差別,可以與STM32很好地兼容。采用OV2640 數字圖像傳感器與STM32結合,設計一個圖像采集系統,實現視頻捕捉、圖像識別、對象跟蹤等功能。因此,該攝像頭十分適合應用于嵌入式設備中[11-13]。
聲紋識別電路:采用Wolfson 推出的WM8978 全功能音頻處理器[14-15],其具有高級的片上數字信號處理功能,包含一個5 路均衡功能,同時在ADC 的線路上提供數字濾波功能,每個輸出都有一個單獨的音量控制 PGA,一個輸出推動或電平轉換位,一個消聲使能,能夠驅動一個8 Ω 的BTL 揚聲器,還提供許多麥克風配置,如包含差分和單端輸入等,能夠很好地接收語音指令。
語音播報模塊:YF017 是一款用于聲音提示、聲音識別等功能的語音芯片,能夠直接驅動喇叭,無需再通過音頻放大電路,外圍只用一個0.1 μF 電容就可以穩定工作,而且還能夠通過外部按鍵或串口進行控制,連接簡便,方便地實現語音提示、語音識別等功能,被廣泛應用于各種電子設備[16]。使用機器人主控的樹莓派驅動,通過配合聲紋識別電路進行程序設計,可以實現陪伴老人聊天的功能。
WiFi 模塊:ESP-01S 是基于ESP8266 芯片的低成本、超低功耗的UART(Universal Asynchronous Receiver/Transmitter)-WiFi 模塊,其采用32 bit/80 MHz 精簡指令處理器,具有完備的傳輸控制協議/網際協議(Transmission Control Protocol/Internet Protocol,TCP/IP)棧,可通過AT(Attention)指令快捷地進行TCP/IP 連接[17]。該模塊可以通過WiFi 或局域網與其他設備通信,確保不在老人身邊時可以實時通信得到數據反饋,在面對無網絡的情況下也能做出相對的調整。
2.2 智能手表硬件設計
智能手表搭載陀螺儀模塊、血氧心率檢測傳感器模塊、藍牙模塊與NB-IoT 等模塊,實現老人摔倒監測、步數計算、定位、血氧心率檢測與數據傳輸的功能。
陀螺儀模塊:LSM6DSM 是由3 軸加速度和3 軸陀螺儀組成的6 軸傳感器,采用創新型電源管理技術,增強型陀螺儀設計,具有高效的數據批處理能力。同時集成加速度驅動的步伐政策、步數計算,以及傾斜度和大幅度運動檢測。與多個獨立傳感器解決方案相比,LSM6DSM 不僅節省元器件數目和電路板空間,而且功耗較低。結合該傳感器的特性,在手表上添加了實現抬腕中斷、計步器、解算姿態獲得傾角等功能。
藍牙通信模塊:采用Nordic nRF52840 模塊,向下兼容4.2、4.0 協議,支持串口數據透傳。這是一款低功耗、高性能的片上系統(System on a Chip,SoC),內置ARM Cortex-M4 處理器和2.4 GHz 射頻收發器,支持藍牙低能耗(Bluetooth Low Energy,BLE)和無線ANT 協議技術,同時具備多種外設接口,也是目前業界最低功耗藍牙模塊,為手表提供更長的續航時間。
NB-IoT 模塊:NB-IoT 是一種專門為物聯網設計的蜂窩技術,所占用的帶寬很窄,只需約180 kHz,適用于信號覆蓋范圍大與低功耗的應用場景[18]。采用M5310A 芯片,支持多種通信協議,包括NB-IoT,并且可在多個頻段(包括L1、L3、L5 等)上運行。此外,該芯片還支持多種安全特性,包括數據加密、身份認證和防篡改等,以確保通信的機密性、完整性和可用性。智能手表通過搭載該模塊可以實現定位和上傳體征信息,收集信息到云服務器。
血氧心率電路:MAX30102 為MAXIM 公司推出的專為可穿戴設備設計開發的血氧飽和度和心率監測傳感器,集光源、接收、濾波和數字化為一體,采用一個1.8 V 電源和一個獨立的3.3 V 用于內部LED 的電源,標準的I2C 兼容的通信接口[19]。智能手表搭載該模塊用來檢測老人的血氧心率,并通過I2C 通信協議與藍牙模塊進行數據的傳輸與同步。
3 軟件設計
3.1 機器人主體
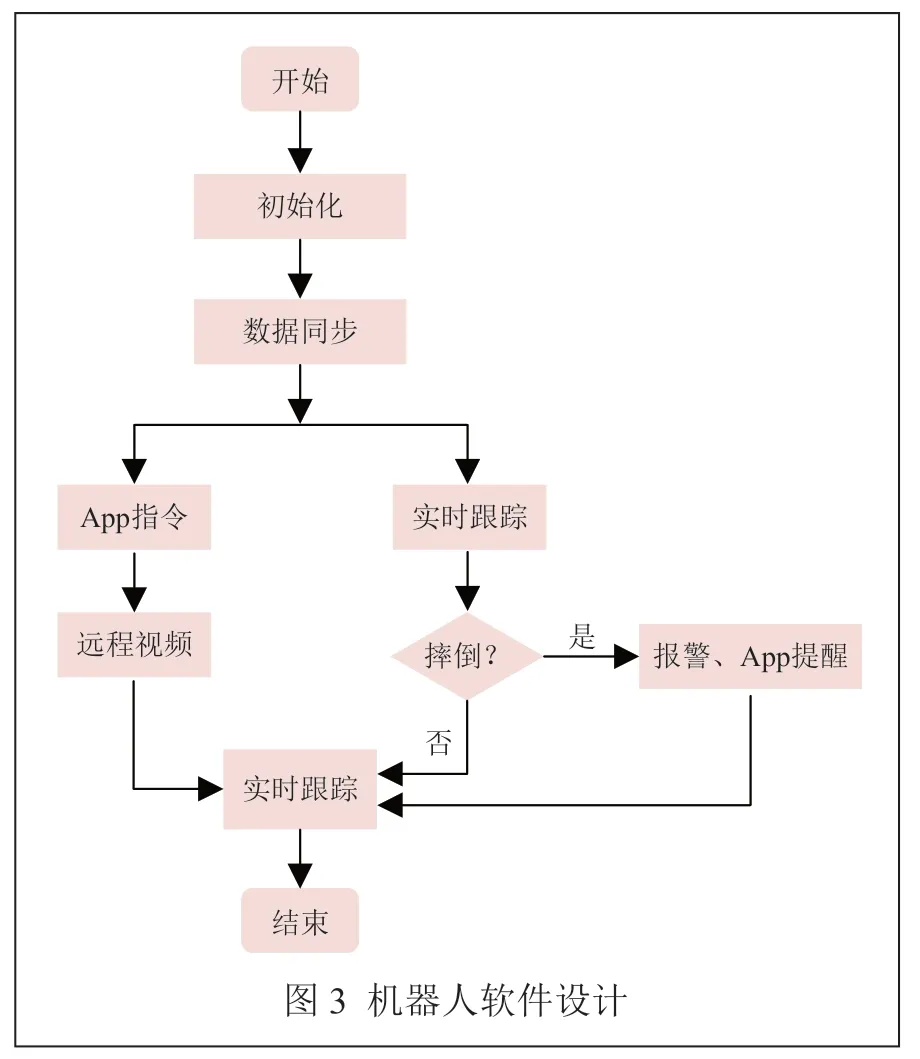
機器人主體基于圖像處理技術,實現對老人實時跟蹤、摔倒報警,與App 通信來實現數據傳輸與指令下達,同時,根據老人的信息調節機器人的日程安排,如提醒老人按時按量吃藥、就寢等。子女可以通過App 遠程視頻功能來調用機器人主體的攝像頭模塊與音頻模塊,實時與老人對話,關注老人動態。機器人還配備語音助手,能夠接收老人下達的語音指令并執行,如報告天氣情況、自動播放音樂等基本的語音指令,省去老人不會操作智能設備的麻煩。語音聊天功能則能夠與老人進行一些簡單的互動,可根據老人喜好完善程序的設計,使語音聊天內容更加豐富。機器人主體設計如圖3 所示。
3.2 智能手表
智能手表使用傳感器檢測技術、無線通信等方式,能夠讀取老人定位、血氧心率與步數的數據信息,實時采集多個重要生命體征數據,并且也配備了防摔倒的功能,防止因機器人移動故障、攝像頭模塊監測異常或機器人不在老人身旁的特殊場景而疏忽了對老人摔倒的監測。手表會將采集到的數據信息通過無線傳輸傳送至機器人,監護人則可通過移動端App 中的體征數據功能查詢老人的實時體征情況。智能手表軟件設計如圖4 所示。

3.3 移動端
為了方便監護人對老人的照料,根據應用需求,開發出了移動端App。App 有語音控制、特征數據、遠程視頻以及實時跟蹤等對機器人進行遠程控制的功能,配合機器人與智能手表,能夠對老人實時、遠程地監護,并對體征數據設定了一個報警閾值,當采集到的體征數據超出設定的報警閾值時,App 將給予警示。移動端App 如圖5 所示。

4 功能測試
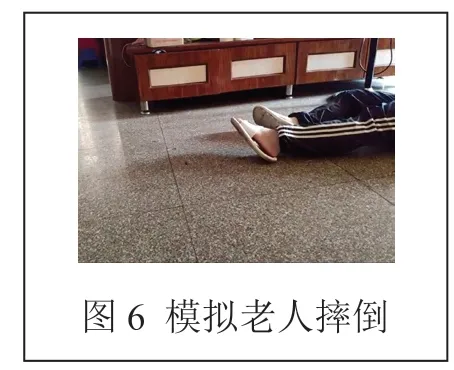
在設計過程中,基于應用場景對機器人與智能手表較為重要的防摔倒功能進行測試。在對防摔倒功能測試中,模擬老人摔倒如圖6 所示。首先,手表會遠程發送信號至機器人端,機器人快速移動至老人周圍,在摔倒老人周圍反復移動并發出警報,如圖7 所示;然后,將情況通過App 告知監護端,如圖8 所示;監護人能夠通過App 遠程視頻功能控制攝像頭獲取當前老人摔倒實時場景,如圖9 所示。經過多次模擬應用場景測試,判斷該系統能夠滿足設計要求。
5 結束語
根據應用需求,提出了針對老人的居家監護系統的設計,并對設計系統進行功能開發,實現了整套系統。通過對系統的現實場景應用測試證明,以樹莓派高性能處理器為核心,結合攝像頭模塊、音頻處理模塊與無線通信模塊等設計的機器人主體,配合內嵌多種傳感器的智能手表與移動端App 構成的居家老人監護系統,能夠解決現如今隨著獨居老人群體不斷擴大而難以照料的問題。該系統比較適用于家庭場景或養老院等室內場景,系統樣機如圖10、11 所示。期待物聯網技術與人工智能能夠在更多領域輔佐人類,代替人類完成更多、更艱難的工作。

猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
