某型艦載機目標的ISAR 成像算法研究
2024-04-02 03:42:36彭關(guān)弘燁任新成王玉清楊鵬舉
現(xiàn)代電子技術(shù) 2024年7期
彭關(guān)弘燁,任新成,王玉清,趙 曄,楊鵬舉
(延安大學(xué)物理與電子信息學(xué)院,陜西延安 716000)
0 引 言
逆合成孔徑雷達(ISAR)是一種利用目標的微動或雷達本身的運動,以實現(xiàn)目標的高分辨率成像的雷達。其通過反向地模擬合成孔徑雷達的運動,利用目標本身的旋轉(zhuǎn)或平動產(chǎn)生的多普勒頻率差,從而獲取目標的二維圖像。相較于傳統(tǒng)雷達技術(shù),ISAR 提供的是動態(tài)、實時、具有較高分辨率的目標圖像,而非單一的點目標信息。ISAR 的優(yōu)勢在于,它可以在很遠的距離上對目標進行高分辨率成像,這使得ISAR 成為軍事偵察、地球觀測和災(zāi)害監(jiān)測等領(lǐng)域的重要工具[1-5]。在軍事偵察領(lǐng)域,ISAR 可以被用來識別和分類飛行中的目標[6],例如飛機和導(dǎo)彈,由于ISAR 可以提供關(guān)于目標的詳細圖像[7-9],因此可以更準確地識別目標類型,甚至可以識別出目標具體的型號。在地球觀測領(lǐng)域,ISAR 可以被用于地形和環(huán)境監(jiān)測,例如,可以使用ISAR 來探測和監(jiān)測地球表面的變化,包括地震后的地形變化、洪水過后的水位變化等。此外,ISAR 也可以用于監(jiān)測海洋表面的情況,如海洋浪涌、海冰變化等[10]。
盡管ISAR 在上述各個領(lǐng)域發(fā)揮著重要的作用,但ISAR 技術(shù)的研究和發(fā)展仍然面臨一些挑戰(zhàn),例如如何提高圖像的質(zhì)量和分辨率,如何處理復(fù)雜背景下的目標識別等問題,其中成像方法是ISAR 技術(shù)面臨的挑戰(zhàn)之一。
傳統(tǒng)的ISAR 成像方法在處理目標的復(fù)雜運動時[11],常常會導(dǎo)致圖像模糊和失真,這一問題在實際應(yīng)用中嚴重限制了其性能。為了克服這些挑戰(zhàn),研究者們開始探索新的成像方法。特別是,基于距離多普勒(RD)算法的ISAR 成像方法,因其簡單且有效,引起了廣泛的研究興趣。RD 算法通過對雷達回波數(shù)據(jù)進行二維傅里葉變換,能有效抑制目標復(fù)雜運動對ISAR 圖像的影響,從而獲得更清晰、更精確的圖像。
文獻[12]提出一種基于穩(wěn)相譜二維原理的改進雙基地距離-多普勒算法,文獻[13]提出一種新的運動補償(MoCo)算法來提高機載SAR MoCo 的效率和魯棒性,文獻[14]提出的局部線性RD(L-RD)模型建立了局部高程的線性約束,迭代算法收斂速度較快。文獻[15]利用RD成像的步驟構(gòu)建了基于深度展開網(wǎng)絡(luò)的RD 學(xué)習(xí)成像網(wǎng)絡(luò)結(jié)構(gòu),將回波數(shù)據(jù)作為網(wǎng)絡(luò)輸入來學(xué)習(xí)回波數(shù)據(jù)到大斜視SAR 圖像的成像過程。文獻[16]構(gòu)建距離向FrFT 域成像算法(RFrFT-RD),最后利用星載SAR 實測數(shù)據(jù)進行地物目標成像。文獻[17]提出了一種新的基于相鄰包絡(luò)差序列NS 的包絡(luò)對齊準則。
盡管RD 算法在ISAR 成像中的應(yīng)用取得了一定的成功,但仍然存在一些問題和挑戰(zhàn)。例如,由于RD 算法假設(shè)目標的運動是均勻的,因此,當(dāng)目標的運動存在加速度時,RD 算法的成像效果會大大降低,這會導(dǎo)致ISAR 圖像模糊和失真。
本文首先說明了ISAR 的成像原理,介紹了運動補償中的包絡(luò)對齊方法,在此基礎(chǔ)上,提出了一種改進的包絡(luò)對齊方法,通過某衛(wèi)星成像對該方法進行驗證,證明了該算法的適用性和靈活性,運用改進的包絡(luò)對齊方法對某型艦載機進行成像,發(fā)現(xiàn)該方法可以有效地提高ISAR 圖像的質(zhì)量和分辨率。
1 ISAR 成像基本原理
1.1 幾何模型
在逆合成孔徑雷達成像中,雷達靜止而目標勻速運動,如圖1 所示,其運動包括從位置1 到位置3 的平動、位置3 的轉(zhuǎn)動,以及位置3 到位置2 的圓周運動,而圓周運動在成像中無作用,可忽略。
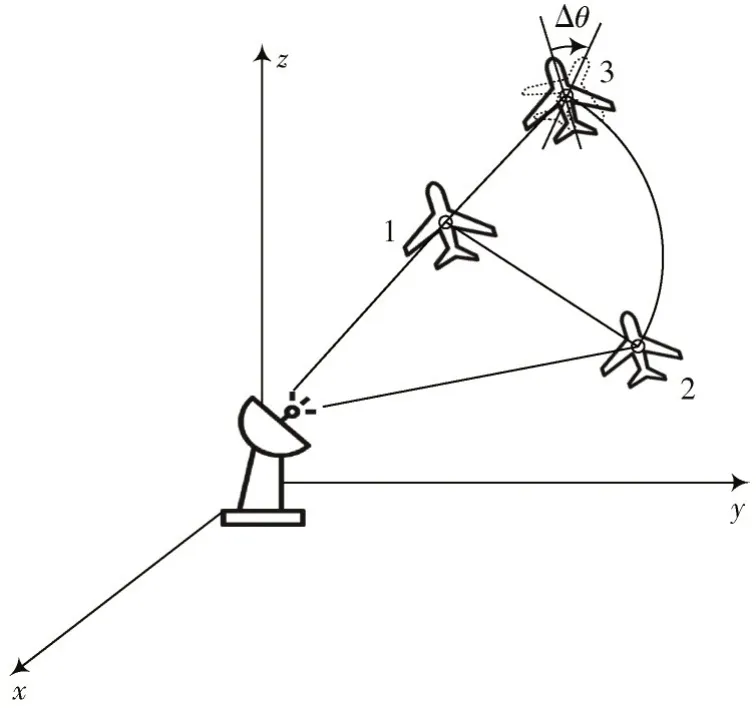
圖1 ISAR 成像中的平動與轉(zhuǎn)動
目標和雷達的相對運動可視為目標的自轉(zhuǎn)和其對雷達的平動。從位置1 到位置3 的平動中,各散射點產(chǎn)生的多普勒頻率相同,對成像無效,需補償。只有在位置2 的旋轉(zhuǎn)運動才導(dǎo)致不同多普勒頻率,有利于成像。平動補償后即可視為雷達對轉(zhuǎn)臺目標的成像。
1.2 轉(zhuǎn)臺成像原理
ISAR 成像所必需的是目標繞其上的某一個參考點在一段時間內(nèi)有一個旋轉(zhuǎn)角,以此來獲得高的橫向分辨率。
如圖2 所示,雷達不動,假定目標放置在一個旋轉(zhuǎn)的平臺上,以目標上的某個參考點為中心轉(zhuǎn)動。若轉(zhuǎn)臺作逆時針方向旋轉(zhuǎn),那么位于轉(zhuǎn)軸上的散射點子回波的多普勒頻率為零,左側(cè)為正,右側(cè)為負,并且散射點偏離中心軸的距離越遠,多普勒頻率值就越大。圖2 中所示的是將空間目標向二維平面xOy上進行的投影,轉(zhuǎn)臺模型就是目標繞z軸以均勻的角速度ω作旋轉(zhuǎn)運動。
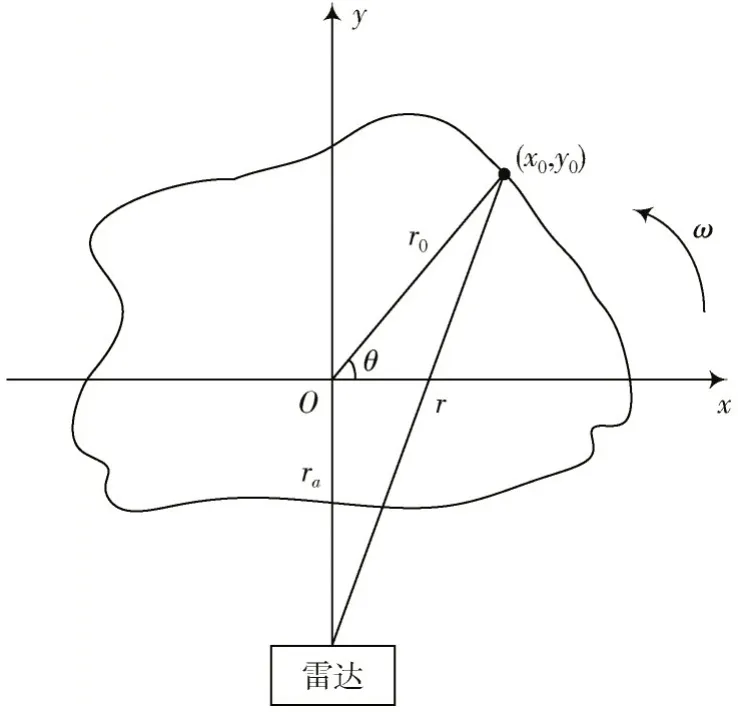
圖2 ISAR 轉(zhuǎn)臺成像模型
假定雷達到目標旋轉(zhuǎn)軸的距離為ra,雷達信號的波長為λ,那么在t= 0 時刻,目標上的某個散射點(r0,θ0,z0)到雷達的距離可以表示為:
如果目標旋轉(zhuǎn)軸到雷達的距離ra遠遠大于目標的尺寸r0,則可以將式(1)近似表達為:
其中:
由此可以計算得到回波的多普勒頻率為:
式中:x0和y0是目標的初始位置;ω是目標的角速度;t是時間;cosωt和sinωt是目標在時間t的位置。
取t=0 時刻周圍極短的時間來處理接收信號,可以得到:
因此,由回波信號的距離延時及多普勒頻率可以求出該散射點的位置(xa,ya)。距離向分辨率取決于脈沖信號的帶寬,與脈沖信號的帶寬B成反比,即:
由式(7)可知,目標的方位向分辨率取決于多普勒分辨率,對于所需的方位向分辨率ρa= Δx,則多普勒分辨率必須為Δfd= 2ω λΔx。實際上多普勒分辨率取決于相干積累時間T,即fd= 1T,換句話說,方位分辨率由下列公式得到:
通過以上分析可知,雷達發(fā)射信號的帶寬越大,則距離向分辨率越高;雷達發(fā)射信號的波長越短,目標在成像積累時間內(nèi)轉(zhuǎn)過的總轉(zhuǎn)角越大,則雷達在方位向上對目標的分類識別能力越強,分辨率越高。
1.3 距離-多普勒成像算法
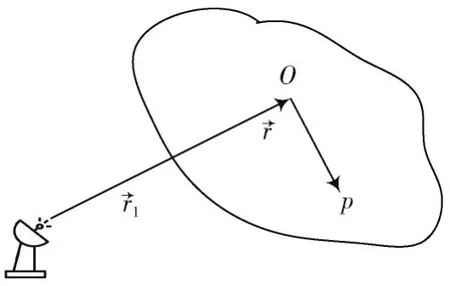
圖3 ISAR 成像原理圖
用向量r→1與向量r→之和的絕對值來表示經(jīng)過運動后雷達與目標上的任一散射點p之間的距離,其中向量r→1表示雷達到目標參考點的位置向量,向量表示目標參考點到目標上點p的位置向量。
雷達與目標上的任一散射點p之間的距離可以表示為:
式中:r、r1分別表示的模;定義向量的單位向量為=,由于r?r1,那么式(9)可以簡化為:
式中“·”表示向量點乘。
設(shè)雷達發(fā)射的信號為線性調(diào)頻信號,表達式為:
式中:T為脈沖重復(fù)周期;f0表示信號的中心頻率;τ表示脈沖寬度;γ=B τ表示信號的調(diào)頻頻率,B表示信號帶寬;n代表發(fā)射的是第n個脈沖;a(t)表示信號的幅值,表示為:
值得一提的是,名物化的最終形式是名詞,認知語言學(xué)的范疇原型和突顯理論對名詞這個語法范疇的研究有助于對名物化的理解。比如,Mihatsch(2009)結(jié)合Langacker對名詞的概念基礎(chǔ)的探討,即通過隱喻的方式從物品(PHYSICAL OBJECT)的概念得到事物(THING)的圖式,說明經(jīng)過名物化過程后,從其他詞類變形而來的名詞可以獲得名詞的詞匯語法和概念特征。
ISAR 的回波信號可以表示為:
式中:t′=t-表示目標的散射強度;V表示目標占據(jù)的空間容量;c 表示光速。
點O處的目標回波表達式為:
運動補償在ISAR 成像中是關(guān)鍵,主要涉及包絡(luò)對齊和相位補償。包絡(luò)對齊調(diào)整雷達回波信號的幅度,消除目標相對運動的影響,需要估算目標的距離和速度;相位補償?shù)窒夭ㄐ盘柕南辔黄疲烙嬆繕说男D(zhuǎn)并調(diào)整雷達相位。這兩步可以減少圖像模糊,實現(xiàn)高清ISAR 成像,是雷達技術(shù)的核心挑戰(zhàn),也增強了目標觀察的準確性。
2 包絡(luò)對齊方法
包絡(luò)對齊在ISAR 成像中起到了關(guān)鍵作用,同時為后續(xù)的相位補償?shù)於藞詫嵉幕A(chǔ)。C.C.Chen 在1980 年首次提出了傳統(tǒng)的包絡(luò)對齊方法,即所謂的相關(guān)法,這一方法充分利用了雷達發(fā)射信號脈沖重復(fù)頻率的高速性質(zhì)。具體而言,在兩個相鄰脈沖的時間間隔內(nèi),目標的運動幅度較小,角度變化量通常不會超過0.01°。因此,兩次回波信號的包絡(luò)之間呈現(xiàn)出強烈的相關(guān)性。相關(guān)法利用這一特性,采用了直接且高效的快速傅里葉變換進行包絡(luò)對齊,從而使得其實現(xiàn)相當(dāng)便捷,運行效率也頗高。但是該方法依然存在誤差,即使處理每次回波信號產(chǎn)生的誤差很小,但是在進行ISAR成像處理時,通常會處理幾百乃至上千個回波信號,因累積而形成的大誤差不容小覷。
包絡(luò)對齊也被稱為粗補償,是對回波信號進行平移,將各次信號平移到一個距離單元內(nèi),包絡(luò)對齊前后如圖4 所示。分布在不同距離單元的回波信號經(jīng)過包絡(luò)對齊之后,實現(xiàn)了在距離方向上的對齊。
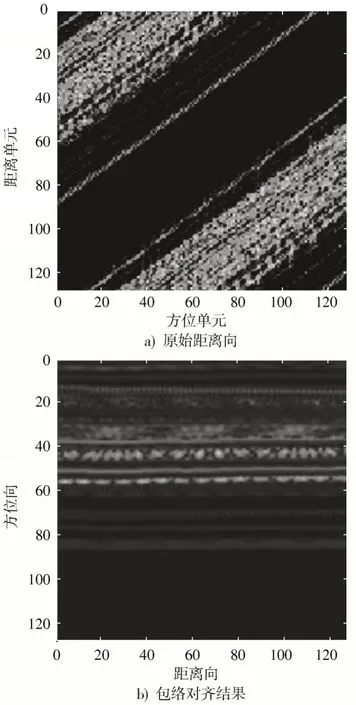
圖4 包絡(luò)對齊
3 改進的包絡(luò)對齊方法及仿真驗證
3.1 改進的包絡(luò)對齊方法
在圖像、信號處理領(lǐng)域,數(shù)據(jù)復(fù)雜性常用熵H來量化,定義為:
式中:R代表一個局部區(qū)域;ri是區(qū)域R中的像素或數(shù)據(jù)點值;p(ri)是ri在R中的概率。
本文提出的改進包絡(luò)對齊方法主要關(guān)注每個像素位置x及其相鄰像素構(gòu)成的局部區(qū)域R(x),核心目標是通過適當(dāng)?shù)乃惴ㄕ{(diào)整R(x)中的數(shù)據(jù)值,從而最小化該區(qū)域的熵,即
本文進一步采用梯度下降等優(yōu)化算法,通過調(diào)整數(shù)據(jù)的屬性(例如像素的強度、顏色或位置),以最小化每個局部區(qū)域的熵。值得注意的是,該方法不僅關(guān)注單個局部區(qū)域的優(yōu)化,還綜合考慮了圖像或信號的全局特性,確保整體數(shù)據(jù)質(zhì)量的提升。這種局部與全局的綜合考慮使得該方法在應(yīng)用于雷達圖像處理時,能夠有效地調(diào)整像素值,從而提高圖像的整體質(zhì)量。
圖5 展示了算法流程圖。首先在淺色框中獲取原始圖像或信號數(shù)據(jù)。接著,在網(wǎng)格框中計算每個像素的熵值,這在橢圓框中用于衡量數(shù)據(jù)復(fù)雜性。根據(jù)熵值與預(yù)設(shè)標準的對比,決定繼續(xù)調(diào)整像素值(左側(cè)豎框)還是使用如梯度下降的優(yōu)化算法(左側(cè)橫框)。最后,深色框輸出優(yōu)化后的圖像或信號數(shù)據(jù),質(zhì)量相比原始數(shù)據(jù)有所提高。
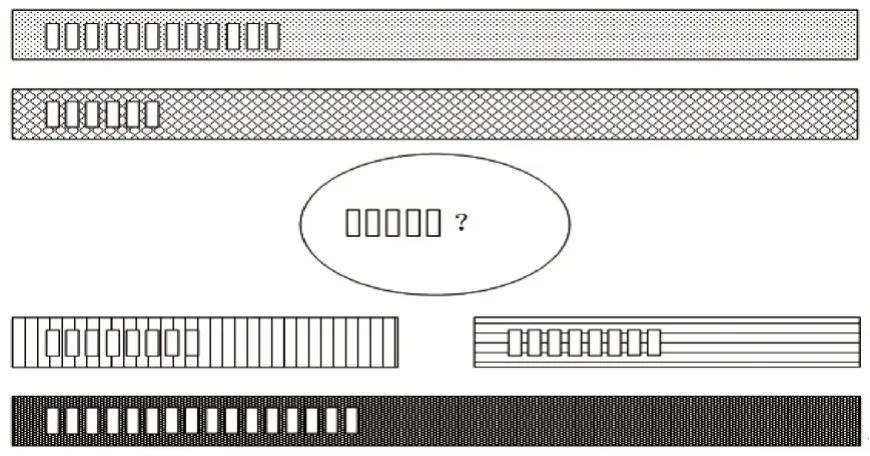
圖5 算法流程圖
3.2 仿真驗證
圖6 是使用Matlab 創(chuàng)建的某衛(wèi)星散點圖,這幅圖像顯示了衛(wèi)星在空間中的位置即姿態(tài)。
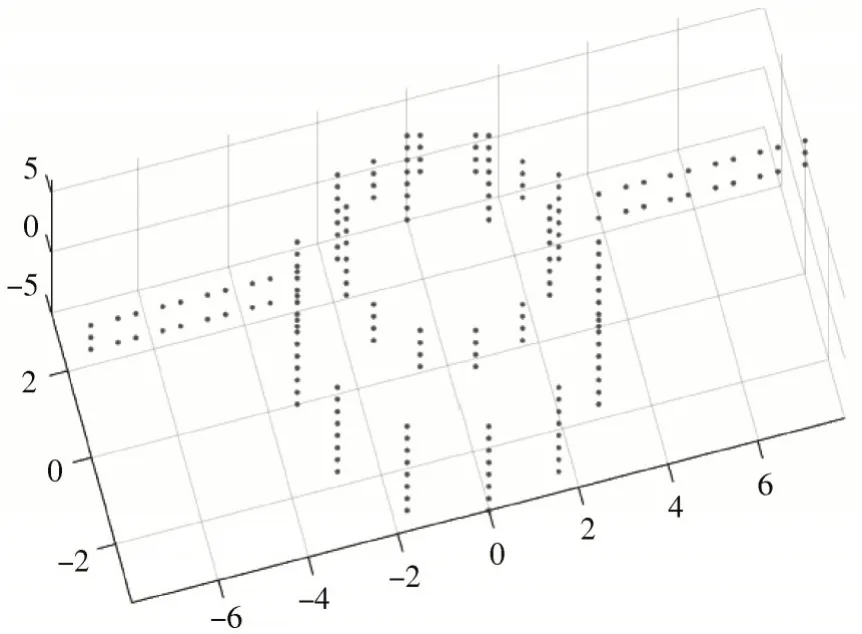
圖6 某衛(wèi)星散點圖
圖7a)為采用傳統(tǒng)的包絡(luò)對齊方法所成的像。該圖像中,目標的平均反射強度為-10 dB,而背景噪聲的平均強度仍為-25 dB,得到的信噪比約為15 dB。圖7b)為采用改進的包絡(luò)對齊方法所成的像。經(jīng)過優(yōu)化處理,目標的平均反射強度提高到了-8 dB,背景噪聲得到了進一步的抑制,降低到了-28 dB,從而信噪比提高到了20 dB。不難看出,這種改進的方法使得圖像的對比度和清晰度有了顯著的提高,能夠看到衛(wèi)星的更多細節(jié),包括其表面的紋理和結(jié)構(gòu)。
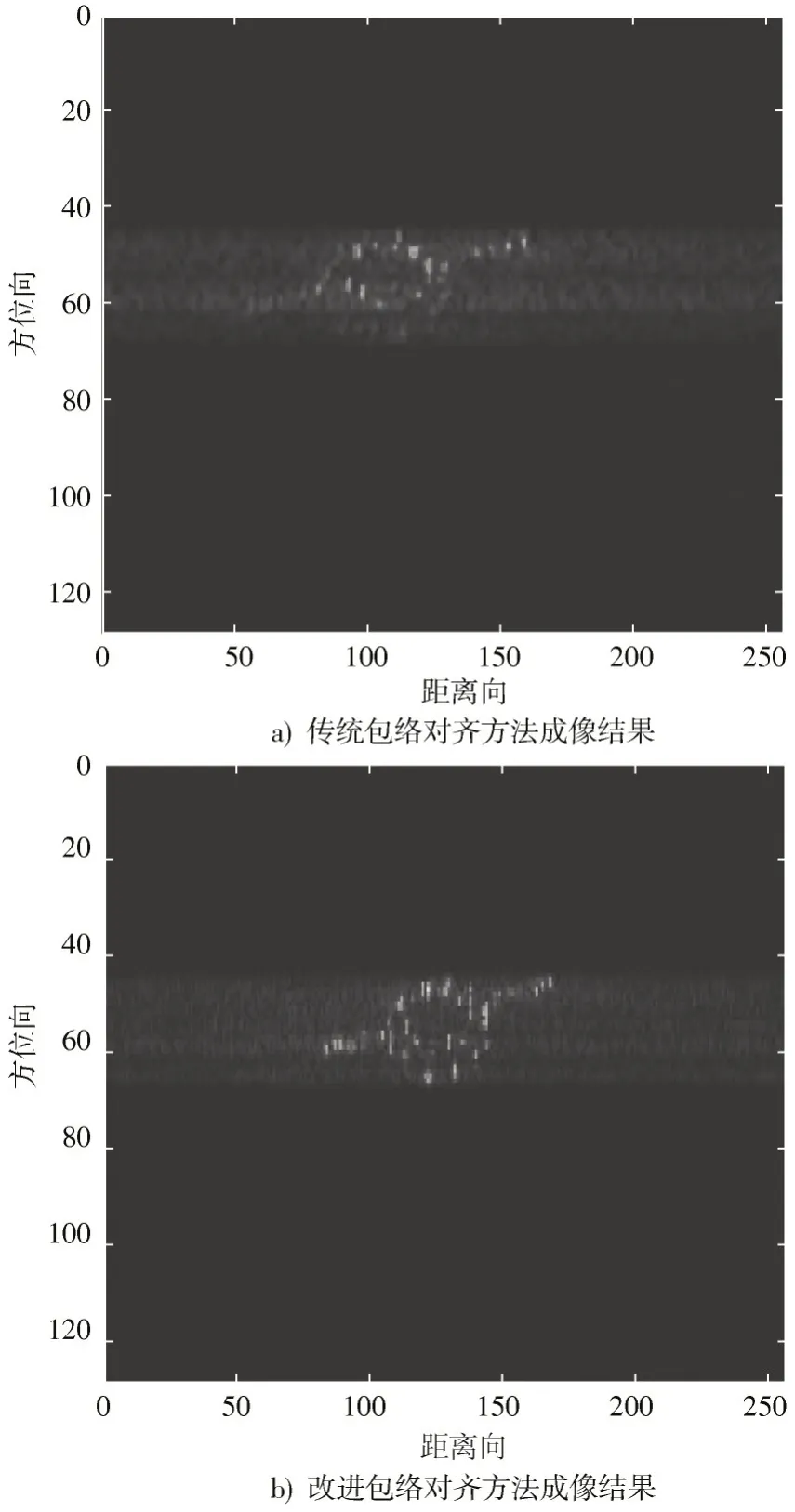
圖7 ISAR 成像
這就驗證了本文提出的改進成像算法的有效性、可行性。
4 實驗仿真
以下仿真過程中,雷達帶寬為400 MHz,載頻為9.0 GHz,目標運動速度為100 m/s,x、y、z三個方向的加速度均為0.05 m/s2,仿真參數(shù)如表1 所示。
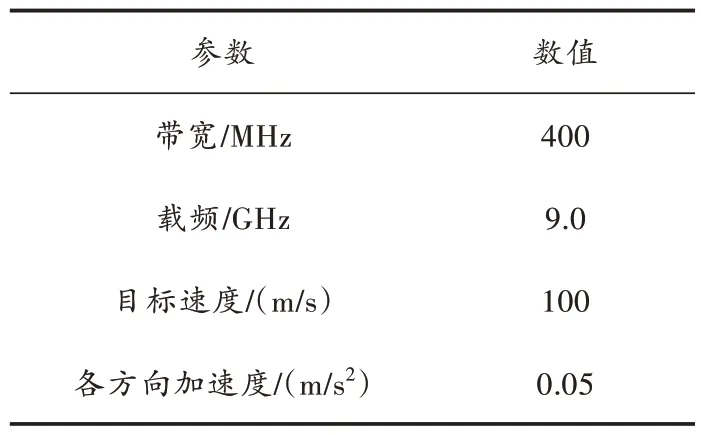
表1 仿真參數(shù)
如圖8 所示為某型艦載機的實物圖及其RCS 散點圖,散點圖上的反射點數(shù)量達到了5 000 個,平均散射點間距為0.2 m。與常規(guī)的三維模型不同,這個散點模型提供了一種獨特的視角,能夠從各個方向觀察飛行目標,經(jīng)過詳細的數(shù)據(jù)分析,發(fā)現(xiàn)目標的平均反射強度為-10 dB,而背景噪聲的平均強度約為-25 dB。
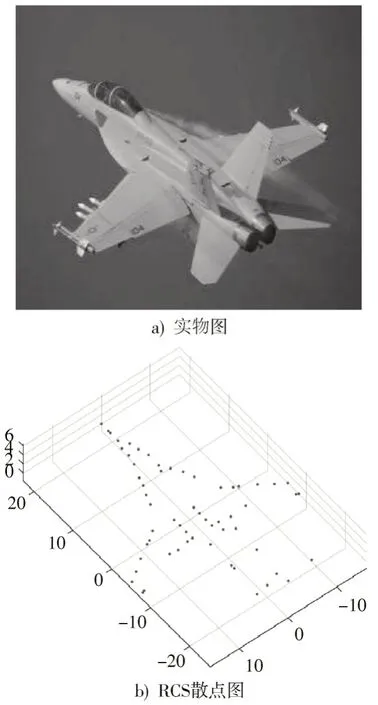
圖8 某型艦載機的實物圖及其RCS 散點圖
以下將仿真驗證中所述方法應(yīng)用到更復(fù)雜的某型艦載機進行實驗仿真,分辨率設(shè)置為0.1 m,對應(yīng)于實際距離的1 10。通過調(diào)整距離向和方位向的分辨率,獲得艦載機的ISAR 仿真成像。
本文對同一型號的艦載機從不同的方位角(125°、175°、225°、275°)進行了雷達成像,雷達的照射功率為2 kW,脈沖重復(fù)頻率為1 kHz。如圖9 所示,從圖中可以看出,隨著觀察方位角的改變,飛機在雷達成像中的表現(xiàn)也發(fā)生了顯著的變化,特別是飛機機身的位置和形狀,這些變化實際上反映了飛機飛行姿態(tài)的變化,提供了理解和分析飛機飛行狀態(tài)的重要信息。
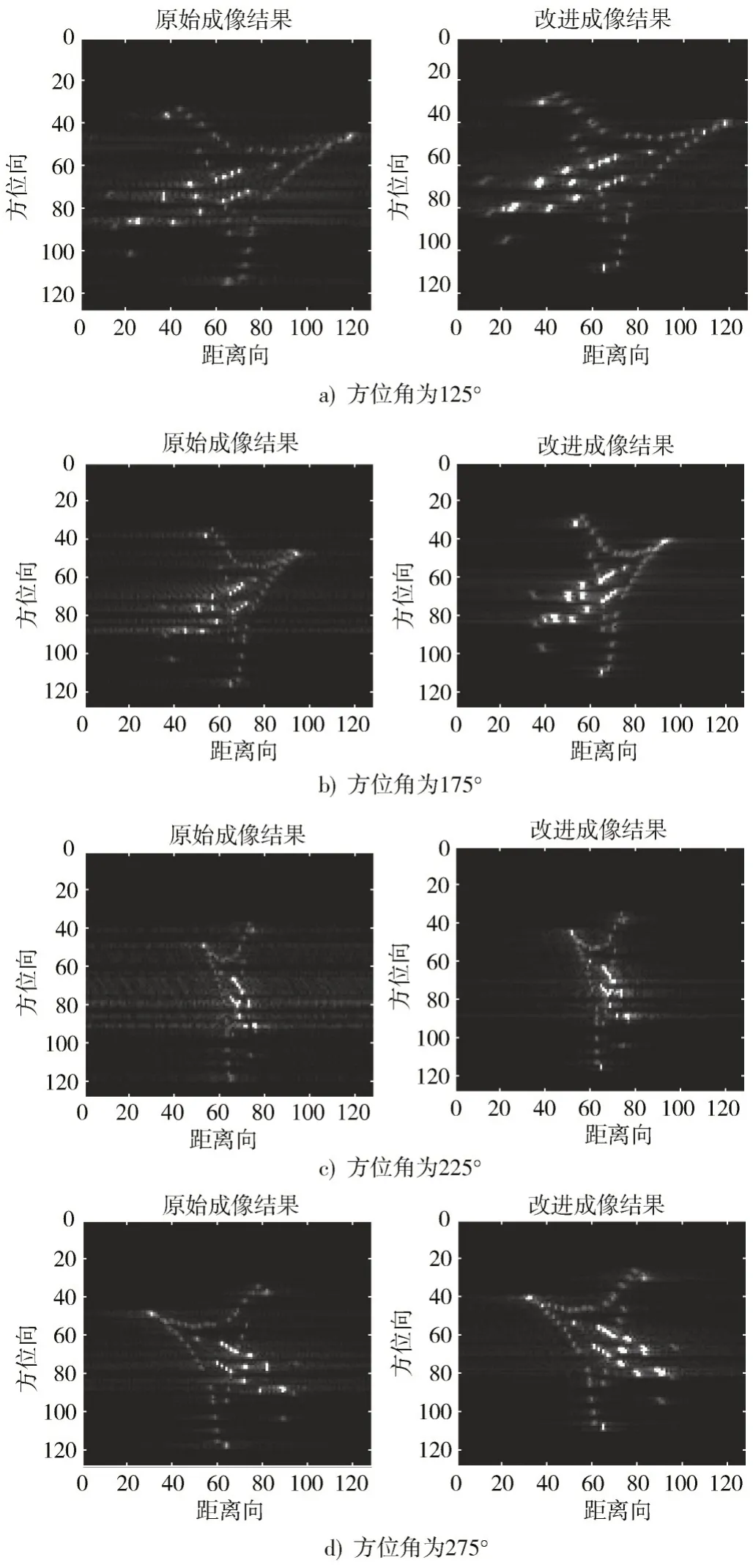
圖9 四種情況成像結(jié)果對比圖
飛行姿態(tài)通常由三個角度來描述:俯仰角(pitch)、滾轉(zhuǎn)角(roll)和偏航角(yaw),在仿真中模擬了目標的旋轉(zhuǎn),這會影響到散射點的位置,從而影響到雷達成像的結(jié)果。
當(dāng)觀察方位角從125°改變到175°時,注意到飛機在雷達成像中的機身位置和形狀發(fā)生了明顯的變化,這是由于飛機從一種飛行姿態(tài)轉(zhuǎn)向到另一種飛行姿態(tài),這種轉(zhuǎn)向在雷達成像中表現(xiàn)為飛機機身的位置和形狀的變化。
當(dāng)觀察方位角從225°改變到275°時,可以觀察到除了散射點有些許變化外,飛機機身有很大程度的翻轉(zhuǎn),這是因為飛機進行了一個較大角度的轉(zhuǎn)向或翻滾,這在雷達成像中表現(xiàn)為飛機機身的顯著變化。為了提高雷達成像的質(zhì)量,采用改進的包絡(luò)對齊可以有效地提高雷達成像的清晰度和準確性,以便能夠更準確地觀察和理解飛機的飛行姿態(tài)變化。
總之,仿真實驗表明,通過對比不同方位角下的雷達成像結(jié)果,可以觀察到飛機機身的變化,這對于理解飛機的飛行狀態(tài)和行為非常有幫助。
5 結(jié) 論
本文研究了改進的包絡(luò)對齊方法在逆合成孔徑雷達(ISAR)圖像處理中的應(yīng)用。研究證明,這種改進的方法不僅顯著提升了圖像質(zhì)量,同時也增強了從各個方向獲取圖像的能力。本文研究成果不僅在軍事領(lǐng)域有應(yīng)用價值,同時也具備潛在的民用價值。當(dāng)然,本文只是就改進包絡(luò)對齊方法提升圖像質(zhì)量進行了研究,更多的提升圖像質(zhì)量的算法還有待于今后進一步研究。
注:本文通訊作者為任新成。
猜你喜歡
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34