基于ABB工業(yè)機器人的物料搬運控制系統(tǒng)
2024-04-14 09:28:37沈燦鋼
信息系統(tǒng)工程 2024年1期
關(guān)鍵詞:變頻器


摘要:工業(yè)機器人大規(guī)模代替?zhèn)鹘y(tǒng)勞動力是大勢所趨,本設(shè)計為PLC與工業(yè)機器人結(jié)合的一種物料搬運控制系統(tǒng)。充分利用機電技術(shù)、機器人應(yīng)用技術(shù)、PLC控制技術(shù)、組態(tài)網(wǎng)絡(luò)技術(shù)、氣動控制。采用ABB機器人、三菱FR-D720S變頻器、西門子PLC、物料檢測傳感器、夾取位置傳感器、氣動元件和觸摸屏等構(gòu)成全自動碼垛搬運系統(tǒng),這個系統(tǒng)可以對不同材質(zhì)工件進行自動分揀和碼垛。實驗結(jié)果表明系統(tǒng)能精準(zhǔn)分揀金屬工件和白色塑料工件,并在連續(xù)工作10個小時后,系統(tǒng)重復(fù)定位精度良好。
關(guān)鍵詞:ABB機器人;PLC;物料分揀;傳感器;變頻器
一、前言
工業(yè)機器人在獲得了接近半個世紀(jì)的發(fā)展后,在弧焊、點焊、碼垛、拆卸、搬運、注塑、沖壓、噴漆等越來越多的工業(yè)領(lǐng)域得到普遍運用[1]。工業(yè)機器人大規(guī)模代替?zhèn)鹘y(tǒng)勞動力也是大勢所趨,使用機器人控制系統(tǒng)、PLC控制系統(tǒng)構(gòu)成的全自動控制的碼垛搬運系統(tǒng)替代傳統(tǒng)的人工工作,可以有效地提高企業(yè)自動化程度,從而提高市場的競爭力。
本設(shè)計采用的ABB機器人、三菱FR-D720S變頻器、金屬物料檢測傳感器、夾取位置傳感器、西門子PLC、氣動元件和觸摸屏等多個模塊,可以對不同物料識別,分類夾取至相應(yīng)的物料槽[1]。
二、物料搬運控制系統(tǒng)方案
(一)系統(tǒng)功能原理
系統(tǒng)分成分揀部分和碼垛部分,分揀部分主要完成對工件的分揀,通過夾取位置處的工件檢測傳感器檢測出工件類型[2]。其工作過程為當(dāng)入料口光電傳感器檢測到有工件放置后,反饋給PLC控制變頻器啟動,變頻器驅(qū)動電機帶動傳送帶把工件送入夾取位置,夾取位置處的工件檢測傳感器對金屬、塑料工件進行檢測,在檢測完成后,PLC對機器人發(fā)送工件類型反饋,然后機器人把檢測的工件根據(jù)相應(yīng)對的類型進行分料入庫[2]。機器人把工件夾取到校準(zhǔn)夾取物料位置的平臺上,兩個平臺中待抓取工件位置需要機器人事先進行示教標(biāo)定運動軌跡物料位置的校準(zhǔn),再把物料搬運至旁邊的物料槽,且搬運完成后發(fā)送反饋信號給PLC[3]。
本設(shè)計主要由示教器、氣動夾具、傳感器、氣動元件、變頻器、觸摸屏、電機與傳送帶等構(gòu)成,系統(tǒng)總體框圖如圖1所示[3]。
(二)系統(tǒng)功能描述
系統(tǒng)就緒后,機器人電機會先上電,然后等PLC收到機器人反饋的電機已上電信號DO1時,機器人會根據(jù)有無暫停記憶執(zhí)行程序,然后PLC也會啟動程序,使供料機構(gòu)把物料放下,變頻器驅(qū)使傳送帶把物料傳送到夾取位置,在傳送帶上面[4],還有一個金屬物料檢測傳感器和一個白色物料檢測傳感器,PLC可以把工件類型反饋給機器人。
當(dāng)工件到了夾取位置后,機器人收到信號,便會來夾取工件。同時機器人還會根據(jù)反饋來的物料類型信號把工件夾取到相應(yīng)的物料校準(zhǔn)位置進行校準(zhǔn),然后再夾取到入料槽里面,最后回到初始工作原點。這樣的流程會一直循環(huán)至供料機構(gòu)沒有物料,才會停止[5]。系統(tǒng)功能如圖2所示。
三、系統(tǒng)硬軟件設(shè)計
(一)工業(yè)機器人系統(tǒng)
采用ABB的IRB 120型號機器人,物料通過傳送帶到達末端時,夾取位置檢測傳感器會發(fā)出信號,然后機器人在夾取物料的同時分揀金屬物料和白色塑料物料,并根據(jù)不同物料夾取到相應(yīng)的倉儲區(qū)域[6]。IRB 120機器人各軸的范圍如表1所示。
(二)變頻器驅(qū)動系統(tǒng)
采用了三菱FR-D720S-0.4K-CHT變頻器,變頻器需要進行設(shè)定頻率,來控制電機驅(qū)動傳送帶把物料運到傳送帶的末端(機器人夾取位置)。變頻器頻率設(shè)置為30Hz,加減速時間改為2.0S[6]。
打開變頻器上端蓋,把接線端STF接到對應(yīng)的PLC輸出端Y2,變頻器STF為電機正轉(zhuǎn)啟動信號。同時把變頻器公共端SD接入PLC輸出公共端COM1。當(dāng)PLC輸出端Y2得電時,三相直流異步電機以30.0HZ的頻率正轉(zhuǎn)運行[7]。
(三)PLC和工業(yè)機器人I/O配置
三相編碼器A、B相為脈沖信號:通過A、B兩相正交計數(shù)器實現(xiàn)計數(shù)和方向判定。Z相為零點位置信號:編碼器每轉(zhuǎn)一圈,Z相輸出一個零點脈沖[7]。
頂料氣缸前限位、頂料氣缸后限位、推料氣缸前限位、推料氣缸后限位、落料檢測屬于供料機構(gòu),由PLC控制。金屬檢測傳感器、白色物料傳感器、夾取位置傳感器屬于傳送機構(gòu),也由PLC控制[8]。光幕常閉是指當(dāng)檢測區(qū)域有物體擋住光線后,會輸出信號,設(shè)備能進行報警或者停止,也受PLC控制[8]。
ABB機器人DO1、DO2、DO3、DO4、DO5等信號都是機器人當(dāng)前處于什么狀態(tài)的信號。DI1是給機器人電機上電,DI2、DI3是根據(jù)判斷機器人有無暫停記憶時,來決定啟動DI2或者DI3[9]。DI6是物料到了夾取位置的時候,由PLC把物料是DI7金屬還是DI8白色塑料的物料類型反饋給機器人,使機器人來抓取物料。
(四)機器人程序設(shè)計
機器人在空間的運動主要有關(guān)節(jié)運動(MoveJ)、線性運動(MoveL)、圓弧運動(MoveC)和絕對位置運動(MoveAbsJ)四種方式。本系統(tǒng)主程序主要運用了關(guān)節(jié)運動指令MoveJ和I/O指令中的WaitTime等,對一些關(guān)鍵點進行示教,使機器人運動到夾取位置夾取物料[10]。
當(dāng)PLC向機器人發(fā)送物料判別信號DI8時,機器人夾取物料的程序如下:
IFTestDI(D652_10_DI8) = TRUE THEN
//如果發(fā)送的信號DI8為真,那么(后面為機器人動作)。
MoveJ p40,v1000, z50,tool0;//TCP從當(dāng)前位置向p40移動,速度是1000mm/s,轉(zhuǎn)彎區(qū)數(shù)據(jù)是50mm,距離P40點還有50mm的時候開始轉(zhuǎn)彎使用的是工具坐標(biāo)too10。
MoveJ p50, v1000, z50, tool0;
MoveJ p60, v1000, fine, tool0;
WaitTime 1; //在此處等待1秒,再執(zhí)行后續(xù)的程序。
Reset D652_10_DO6;//松開夾具。
WaitTime 1;
MoveJ p70, v1000, fine, tool0;
WaitTime 1;
Set D652_10_DO6;//夾緊夾具。
WaitTime 1;
MoveJ p80, v1000, z50, tool0;
MoveJ p90, v1000, z50, tool0;
MoveJ p100, v1000, fine, tool0;
WaitTime 1;
Reset D652_10_DO6;
WaitTime 1;
MoveJ p110, v1000, z50, tool0;
MoveJ p240, v1000, z50, tool0;
MoveJ p250, v1000, z50, tool0;
PulseDO\PLength:=2, D652_10_DO4;//數(shù)字量輸出信號D652_10_DO4輸出一個脈寬為2S的脈沖。
(五)機器人運動設(shè)計
機器人運行速率設(shè)定為35%,最大速度為5000mm/s。然后機器人松開夾具,從初始工作原點向p10移動,速度是1000mm/s,轉(zhuǎn)彎區(qū)數(shù)據(jù)是50mm,距離p10點還有50mm的時候開始轉(zhuǎn)彎使用的是工具坐標(biāo)too10。等待直到夾取位置信號D652_10_D16為1。從p10向p20移動,速度是1000mm/s,轉(zhuǎn)彎區(qū)數(shù)據(jù)是50mm,距離p10點還有50mm的時候開始轉(zhuǎn)彎使用的是工具坐標(biāo)too10;再從p20向p230移動,p230向p320移動,等待一秒,抓緊夾具,等待一秒,移至p30點。
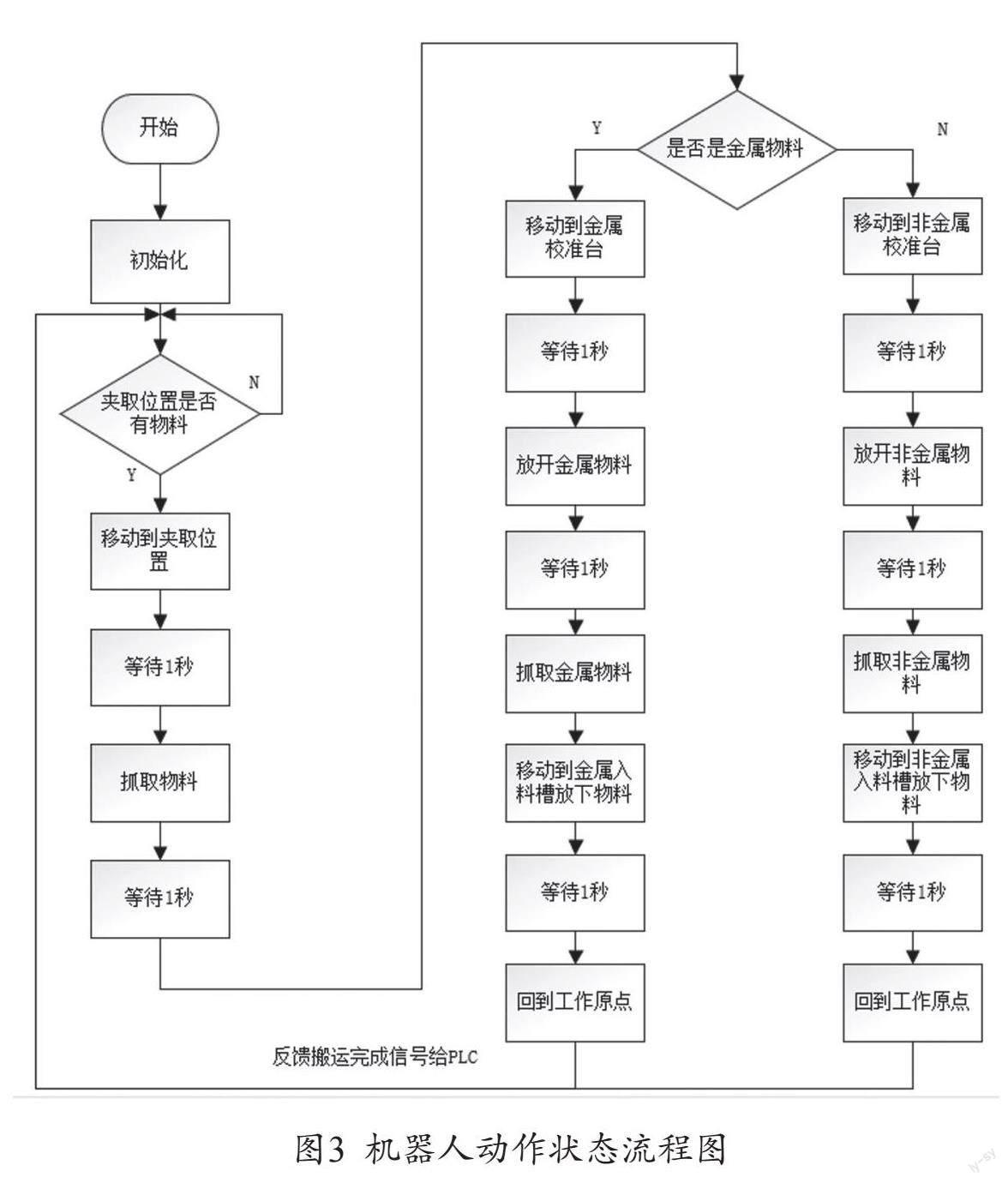
然后機器人需要判斷PLC反饋的物料類型,對物料進行分揀入庫。如果白色塑料物料信號DI8為真(置一),移動至p40點,然后到p50點,再到p60點[9]。等待一秒后,松開夾具,等待一秒,對物料位置進行校準(zhǔn),移動至p70點。等待一秒,夾緊夾具,移動到p80點,然后到p90點,再到p100點。等待一秒后,松開夾具,把夾具放進入料槽中,等待一秒后,移動到p110點,然后到p240點,再到p250點。然后數(shù)字量輸出信號D652_10_DO4輸出一個脈寬為2S的脈沖,代表機器人搬運完成。而金屬物料信號置一,機器人運動流程除了不同入料槽外,別的一模一樣。當(dāng)供料機構(gòu)中沒有物料后,機器人調(diào)用DB模塊,機器人移動到工作原點。機器人動作狀態(tài)流程如圖3所示。
四、系統(tǒng)調(diào)試運行
機器人會判斷夾取位置有無工件,當(dāng)物料抵達夾取位置的時候,PLC會向機器人發(fā)送夾料信號,機器人就會移動至夾取位置,等待一秒后,抓取物料;再等待一秒,判斷物料信號,如果物料是金屬物料,機器人會移動至金屬校準(zhǔn)臺;等待一秒后,放開金屬物料,校準(zhǔn)位置;等待一秒后,再抓取金屬物料;等待一秒后,再把物料夾取進金屬放料槽;等待一秒后,機器人回歸至初始工作原點,同時會反饋搬運完成信號給PLC。如果供料機構(gòu)里面還有物料,系統(tǒng)會和之前的運動流程一樣循環(huán)動作,當(dāng)供料機構(gòu)里沒有物料時系統(tǒng)停止[11]。系統(tǒng)試驗調(diào)試如圖4所示。
五、結(jié)語
本項目為PLC與工業(yè)機器人結(jié)合的控制系統(tǒng),充分利用機電技術(shù)、機器人應(yīng)用技術(shù)、PLC控制技術(shù)、組態(tài)網(wǎng)絡(luò)技術(shù)、氣動控制、工業(yè)機器人搬運系統(tǒng),采用主流ABB小型機器人作為示教編程對象,選用常見的西門子S7-200 PLC和MCGS觸摸屏[11]。物料分揀搬運系統(tǒng)主要從工業(yè)機器人運動控制、PLC變頻調(diào)速這兩個方面重點進行設(shè)計,這個系統(tǒng)可以對白色塑料工件和金屬工件兩種工件進行自動化分揀和碼垛。實驗結(jié)果表明:系統(tǒng)能精準(zhǔn)分揀金屬工件和白色塑料工件,可以使用觸摸屏實現(xiàn)系統(tǒng)的操縱和監(jiān)控;在系統(tǒng)連續(xù)工作10個小時后,重復(fù)定位精度良好。
參考文獻
[1]沈燦鋼.基于ABB機器人的搬運分揀教學(xué)實驗臺的開發(fā)與設(shè)計[J].物聯(lián)網(wǎng)技術(shù),2022,12(12): 36-138.
[2]唐云鵬,崔媛媛.機械制造中智能機器人數(shù)控技術(shù)的應(yīng)用[J].現(xiàn)代制造技術(shù)與裝備.2023,59(04):197-199.
[3]湯曉華,呂景泉.全國職業(yè)院校技能大賽賽項設(shè)計及其立體化教學(xué)資源開發(fā)[J].中國職業(yè)技術(shù)教育,2012(35): 81-84+88.
[4]沈燦鋼,孫曉明.西門子全集成工業(yè)網(wǎng)絡(luò)實訓(xùn)室設(shè)計與實現(xiàn)[J].實驗技術(shù)與管理,2015(02):170-172.
[5]趙升噸,賈先.智能制造及其核心信息設(shè)備的研究進展及趨勢[J].機械科學(xué)與技術(shù),2017,36(01):1-16.
[6]黨媚,劉愛云.基于MCGS觸摸屏與S7-200的以太網(wǎng)小型自動化系統(tǒng)[J].自動化技術(shù)與應(yīng)用,2018,37(03):76-79.
[7]沈燦鋼.利用S7-1200PLC和HMI設(shè)計智能混凝土攪拌站控制系統(tǒng)[J].公路,2020(05):11-15.
[8]沈燦鋼.一種SMART PLC控制的氣動爬桿機器人的設(shè)計[J].機電工程技術(shù),2019(10):13-16.
[9]李漢超,高燕,黃昕.基于工業(yè)機器人控制系統(tǒng)的軟PLC設(shè)計[J].機床與液壓,2021,49(05):60-63.
[10]趙禎祥,呂文博,安海寧,等.智能自動繪圖寫字機器人[J].物聯(lián)網(wǎng)技術(shù),2020,10(03):7-8.
[11]張寧菊,俞張勇.基于ABB機器人的I/O模塊與信號配置[J].機電工程技術(shù),2020,49(01): 13-15+91.
基金項目:1.2021年江蘇省高校“青藍工程”優(yōu)秀教學(xué)團隊項目(智能制造自動化技術(shù)教學(xué)團隊);2.2022年江陰職業(yè)技術(shù)學(xué)院教改研究課題“以崗課賽證融合育人課程教學(xué)改革促進工業(yè)機器人專業(yè)技術(shù)技能人才培養(yǎng)”;3.2022年江陰職業(yè)技術(shù)學(xué)院高水平專業(yè)“工業(yè)機器人技術(shù)”
作者單位:江陰職業(yè)技術(shù)學(xué)院
責(zé)任編輯:張津平
猜你喜歡
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(shù)(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年11期)2014-02-27 14:09:59
