機載航空相機前移像移補償技術?
2024-04-15 09:24:20趙育良李明珠
艦船電子工程 2024年1期
關鍵詞:飛機
趙育良 李明珠
(海軍航空大學青島校區 青島 266041)
1 引言
在機載航空相機成像過程中,由于飛機的運動、姿態變化、振動及氣流擾動等原因會造成感光介質與目標影像之間產生不同程度的相對運動,裝在飛機上的航空相機當飛機沿著坐標X 軸(縱軸)方向飛行時,產生像前移;飛機繞X 軸旋轉,產生由橫滾引起的像移;飛機繞Y 軸(橫軸)旋轉,產生由俯仰引起的像移;飛機繞Z 軸(立軸)旋轉,產生由偏航引起的像移。當影像移動達到一定程度足以超過分辨率要求時,就會影響到航空相機成像質量。隨著航空攝影技術的不斷發展,航空影像偵察裝備的分辨能力不斷提高,相機的像移補償系統與成為現代高分辨率航空偵察設備的必要組成部分[1~2]。本文重點討論前移像移對影像質量的影響及其補償技術。
2 前移像移的產生及影響
航空攝影產生前向影像位移的原因,主要是在快門曝光的瞬間,機載航空相機隨偵察平臺做前向運動而造成的。如圖1 所示,假設某鏡頭焦距為f的航空相機在H m 高空以地速W 的飛行速度對地進行偵照,在快門曝光時間t內,相機隨飛機平臺高速運動從O 點到O′ 點,但是地面上的目標A 的位置不動,在此過程中,相機與地面目標的相對位置發生了變化,其影像的位置也由a點移動到了a′點,即產生了影像位移。如圖2 所示,如果假設飛機不動,目標向飛機后方移動,像影即相應向前移動,其速度用V影表示。在曝光時間t內,目標移動的距離S=Wt。像影移動的距離Δl=V影t,由幾何關系:
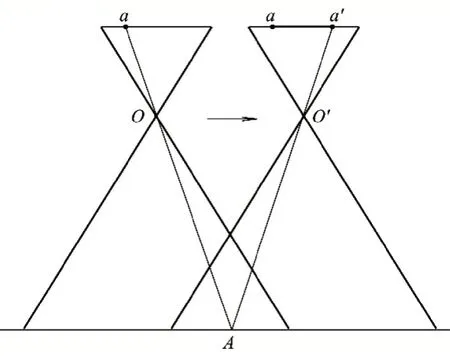
圖1 前移像移產生原理圖

圖2 前移像移產生原理等效圖

圖3 楔形鏡對光線的作用
于是等到像移速度的公式:
像移速度乘以曝光時間,就是在曝光時像影移動的距離Δl:
如果相機左傾斜或右傾斜照相,傾斜角為α,左為正、右為負,那么前向像移速度為
因為Δl很小,所以像移與焦距的比值就是在曝光時間中像點繞主點旋轉的角度φ的弧度值:
像影移動距離Δl(即像影模糊程度)與地速W、焦距f 和曝光時間t 成正比,與照相高度H 成反比。在低空高速飛行的情況下,為了使像影移動距離不超過允許的范圍內保證成像清晰,可以縮短曝光時間,但過多縮短曝光時間,就會影響曝光量,造成曝光不足,同樣會使航空影像質量下降。顯然不能僅通過縮短曝光時間來解決低空高速飛行照相時引起像影模糊的問題。為了在低空高速和弱光條件下進行照相偵察,需要采取了一些抵消像影移動的方式,這些方式稱為像移補償。
3 像移補償方法及實現途徑[3~4]
不同相機的結構有顯著的差異,其前移像移補償的方法也各不相同,比較常見的補償方式主要有四類:光學式補償、機械式補償、電子式補償及圖像式補償。
3.1 光學式補償
光學補償是采用光學方法,通過移動或旋轉相機光學系統光路中的光學器件(如楔形鏡、鏡頭及反射鏡等),從而使像點產生補償速度,保證成像介質和目標影像在快門開放過程中保持相對靜止,從而達到像移補償的目的。這一類補償方式在美國的KS-146、KA-112等航空相機上均得到了應用。
1)雙光楔像移補償[5]
該方法主要用于中長焦折射式航空相機,將兩個頂角為β和折射率都相同的楔形鏡片,安裝在鏡頭的前面,兩個鏡片以相同的速度繞相反的方向旋轉,從而獲得適當的像點補償速度。
同三棱鏡類似,楔形鏡也有對光線偏折的作用。假定兩面間夾角為β,透過的光線偏角α,則根據偏角公式有:α=β(n-1)。
這樣如果使楔形鏡沿主軸以每秒鐘N 轉的角速度旋轉,則對于焦距為f的航空相機,可得到影像補償速度:
而雙楔形片像移補償的原理,即在鏡頭前加裝了兩片楔形鏡,當快門開放過程中,兩片楔形鏡以相同的角速度反向旋轉,其補償速度的獲取可利用速度迭加的方法解釋。如圖4 所示,每個楔形鏡片使像點運動的軌跡,是一個圓,為了說明方便,圖上把兩個圓分開畫出。在各個瞬間的像點的速度,是該瞬間兩個分速度的和,即:

圖4 雙光楔光路原理圖
由于兩鏡片按相反方向旋轉時,使像點沿飛行側方向上移動的分速度大小相等,方向相反,所以合速度V補x為零,即像點不沿側方向移動,這樣就不會造成像影側方向模糊。
沿飛行方向移動的補償速度V補y的情況。由圖4可知:
如果將曝光時機選擇在鏡片厚部處于左、右位置,即一個鏡片φ=90°,另一個鏡片φ=-90°,此時,sinφ=1,則
選擇鏡片轉速N,使V補y=V影,就可以達到像移補償的目的。
此式即為確定雙楔鏡轉速的公式。當鏡片折射率n 及頂角β一定后,轉速即取決于照相時飛機的速高比。
雙楔鏡像移補償設備的曝光時機,通常選擇在φ=±90°,這是因為:第一,當兩楔鏡厚部分別正在飛行側方向時,兩鏡互相彌補,組成一塊平行的厚玻璃,它對像影質量的影響較小。第二,當φ約為±90°時,V補y的數值不但最大,而且隨時間的變化率比較小,即V補y比較平穩。
2)反光鏡補償
對于長焦距航空相機,經常采用帶有反光鏡的臥式設計,對于這類相機,可利用反光鏡可實現前移像移補償。帶有反光鏡的相機曝光時,地面目標以地速W移動,像點同樣會發生像移,如圖5所示。

圖5 反光鏡式臥式相機像移光路原理
對于主光軸上的像點,要使得成像時像不動,仍然在主光軸上,應使主光軸隨目標點移動,這個光路是實際系統的共軛像。要實現準確的跟隨,需嚴格控制反光鏡的擺動角速度。
主光軸的轉動角度:
反光鏡的擺動角度:
反光鏡的擺動角速度:
擺動是往復的,只有順時針擺動時才是補償階段。
3)移動鏡頭式補償
對于短焦航空相機,由于鏡頭重量小,故可采用移動鏡頭式補償,該方法是在快門開放瞬間,使鏡頭向后運動,使得像片與感光材料或器件相對靜止。
為此鏡頭的移動速度必須滿足:
而該式是在f?H的條件下取得的,因此,只有當f越小時才越精確。
3.2 機械式補償
該方法是在快門開放過程中,移動感光介質實現補償的一種方式。通過上述方法,得到相機影像的位移速度后,控制焦平面位置感光介質進行同步運動從而抵消由于飛機運動帶來的影像位移。在某型膠片航空相機中,通過移動展平板上的膠片(速度為像移速度),來對飛行方向上產生的像移進行補償。
其補償方法是:在曝光過程中使膠片以速度f·W/H與像移同向移動,即V補=V像。
這種補償方法在實際實現時,需要解決兩個問題。一是在每一個工作循環內膠片需要以兩種不同的速度運動。曝光時膠片慢速(V補)運動,用以補償像移;曝光結束后,膠片需以快速卷過一個幅面的長度,做好下一次曝光的準備。二是需要解決曝光時膠片運動和展平之間的矛盾。在用抽氣法展平時,采用活動展平板的結構,曝光時展平板和膠片同時作補償運動,曝光后展平板和膠片分離并反向移回初始位置。
3.3 電子式補償
以光電成像器件構成的數字圖像的電子穩定的通用方法是:直接從數字圖像中找到每一幀圖像相對于參考圖像的全局運動矢量,然后用解算出的運動參數去控制光電成像器件輸出像素各行列的起始讀取位置,從而達到圖像補償穩定的目的。電子穩像系統一般包括三個主要的功能模塊,即運動矢量的檢測模塊,圖像補償量運算模塊和補償圖像合成模塊,其中運動矢量的檢測技術最為關鍵,它直接關系到穩像精度及其可應用范圍。
3.4 圖像式補償
此方法將離散的點擴展函數結果用于數字航空相機影像處理,通過對相機成像分析,結合像移產生的規律。
對于某航空相機成像系統,如令H 為降質因子,用f(x,y)表示原始圖像為,經降質退化后得到圖像用g(x,y)表示,用n(x,y)表示造成圖像退化的各種隨機噪聲,這樣即可建立由于像移造成的圖像退化模型,如圖6所示。
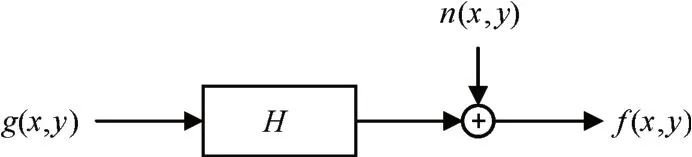
圖6 圖像退化模型
航空線相機在成像過程中,作為一個線性且位移不變的系統,并忽略隨機噪聲條件下:
式中的W(x-α,y-β)稱為沖激函數。
令h(x-α,y-β)=H?W(x-α,y-β)作為系統對目標沖激函數的響應,即點擴散函數,則有:
對上式兩邊求傅里葉變換,并通過卷積定理得:
因此,只要構建出點擴散函數的傅里葉變換H(u,v),結合上述公式,即可進行由于像移造成的退化圖像的恢復。
以下就是某CCD 相機的像移退化圖像點擴散函數的表達式:
式中,l為CCD 縱向長度,W 為飛機地速,f為相機焦距。
4 速高比的獲取
如上所述,無論是哪種像移補償方式,要想獲取像移補償的速度或通過軟件形式完成補償,都需要飛機平臺當前的速高比大小。傳統的速高比獲取方法有直接測量法和間接計算法。直接測量法是通過機載相機操縱系統直接裝定的。對于傳統的航空相機的速高比是飛行員或領航員通過相機操縱器手動裝定得到的。但隨著航空攝影技術的不斷發展,新型航空偵察裝備的分辨率水平越來越高,陸續加裝了穩像系統、自動調焦系統,這些系統都需要實時的高度、速度、姿態等飛機數據,因此,新的航空偵察裝備大都實現了與飛機大氣機、慣導等機載設備的交聯,通過ARINC429、ARINC407 等航空總線,實現相關總線數據的實時獲取,穩像系統的像移補償機構即是通過上述方法得到速高比數據的。通過實時速高比數據,實現對相應補償機構的控制,從而達到補償像移的目的,圖7 為某型航空相機速高比獲取的硬件原理圖。
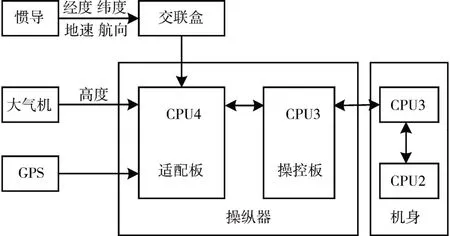
圖7 某型航空相機速高比獲取的硬件原理圖
間接計算法則是利用像移規律,反向計算得到的。該方法通過測量機載航空偵察設備的外接設備得到像移速度,從而反推得到速高比數值。主要有狹縫法、掃描相關法、光程差法及外差法等,文獻[6]提出了基于圖像匹配的速高比精確測量方法,既減小了環境對速高比測量精度的影響,又使測量設備實現了數字小型化。
5 像移補償的效果評價
像移的程度主要用像移量△l 的大小來表述,像移量越大,圖像退化就越嚴重,文獻[7~8]通過建立航空相機縱向像移量、像移速度模型、分析研究縱向像移補償機構對像移補償殘差的影響特征,提出了運用像移補償殘差作為縱向像移補償機構故障檢測的方法,并通過實驗分析驗證了其有效性。文獻[9~12]則通過構建包括光源“靶標”光學準直儀,動態目標發生器等在內的像移補償效果試驗測試系統,通過計算焦平面處的成像分辨率,來評估像移補償效果。除此之外,還可用像移調制傳遞函數MFTV這一指標來衡量:
式中的f 是航空圖像的空間頻率,是指圖像函數在單位長度上重復變化的次數,量綱為“lp/mm(線對/毫米)”。MFTV的值可表征像移對圖像質量的影響,其值越小,影響越大,圖像退化越嚴重,反之圖像則越清晰。當無像移時,△l= v影t=0,則MFTV有最大值1,一般航空相機系統的MFTV的值要求大于0.64,即,f < 2/△l。也就是說,如果允許像移量為0.05mm的話,空間頻率不高于40 lp/mm。
6 結語
目前長焦距航空相機系統一般采用光學像移補償方式,隨著航空相機系統數字化發展趨勢愈發明顯,將光學和電子方式有機地結合起來,已開始在國際上引起廣泛重視。另外亦可拓展至各個軸向及高頻等穩像應用。光學穩像與電子穩像的合成系統將既充分利用光學穩像系統的抗高頻振動、抗平動與轉動合成運動能力強等優勢,又能結合電子穩像質量輕、功耗低、處理手段靈活等特點,對實現高精度、高可靠性的數字相機的穩像系統具有重要意義。光學和電子的結合是未來像穩定技術發展的趨勢之一。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
