一種提高穩定平臺抗低頻擾動能力的控制算法?
2024-04-15 09:24:58馬俊安李星洲吳建剛高玉文楊紅霞
艦船電子工程 2024年1期
馬俊安 李星洲 吳建剛 高玉文 楊紅霞
(四川航天燎原科技有限公司 成都 610100)
1 引言
導引頭是精確制導武器系統的重要組成,用來完成對目標的探測和跟蹤,并給出制導需要的運動參數[1],作為導引頭重要設備的穩定平臺,可以有效隔離導彈的擾動,并保持波束指向的慣性空間穩定,其抗低頻擾動能力的優劣影響著穩定平臺的性能。所以對穩定平臺抗低頻擾動能力進行研究很有必要。
穩定平臺多數采用直接驅動方式,所以負載上的擾動直接對系統的產生影響,該擾動主要是作用于平臺速度回路[2]。導彈的姿態變化通過軸系間的摩擦力逐漸耦合至波束指向軸[3]。當穩定平臺框架轉動時,軸系間的摩擦力矩可以導致穩定平臺在低速工作時出現震蕩等現象[4~5]。本文設計了針對導彈低頻姿態擾動情況下的一種控制算法方法。
2 系統組成及原理
導引頭穩定平臺主要由穩定回路和角跟蹤回路構成[6],示意框圖見圖1。其中,天線、發射接收機、信號處理機組成測角系統,測量電軸與目標的誤差角,陀螺、電機驅動器、電機組成伺服機構,驅動天線朝減小誤差角的方向轉動。
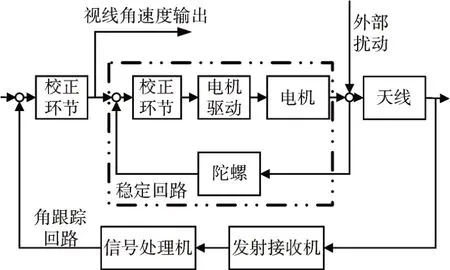
圖1 穩定平臺組成框圖
導引頭角跟蹤系統的簡化原理框圖由穩定回路和跟蹤回路組成。速率陀螺儀用于測量導彈的姿態擾動角速度,使平臺朝導彈的姿態擾動相反的方向移動,從而隔離導彈的擾動。跟蹤回路中的接收機實時測量導彈瞄準線與目標之間的誤差角,穩定回路處理誤差角并控制載荷向減小誤差角的方向移動,從而完成閉環控制并實現角度跟蹤,在跟蹤過程中輸出視線角速度。
圖2中,qz為目標角;qs為穩定平臺框架角;θ為導彈擾動角速度;G1(s)為位置回路傳遞函數;G2(s)為速度回路傳遞函數,Kg為陀螺反饋通道比例系數。uf為速度環反饋速度,uc為控制速度,un為穩定平臺運動速度。
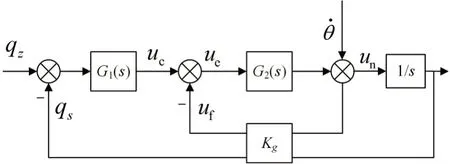
圖2 穩定平臺簡化原理框圖
根據圖2,當qz=0時,從導彈姿態擾動角速度到視線角速度輸出的傳遞函數為
由式(1)可知,導彈擾動對視線角速度的影響與穩定回路前向通道的倒數成正比例。
uc穩態值輸出與視線角速度成正比例,是實現比例導引需要測量的導彈與目標間的相對信息,其性能受穩定回路前向通道放大倍數影響。
3 穩定回路設計
穩定平臺穩定回路G2(s)由的穩定回路控制器Gc(s)和控制對象P(s)組成,控制對象P(s)傳遞函數為
3.1 普通PI控制器
控制器采用PI控制,傳遞函數為
圖3 為校正后系統開環Bode 曲線。其相位裕量為45deg,完全滿足工程中相位裕量在之間的要求,同樣其幅值裕量19dB,系統是穩定的。同時在頻率1Hz 處,系統開環Bode 曲線的幅頻特性59.6dB,可知,在普通PI 控制器作用下擾動對系統的影響在降低了59.6dB。
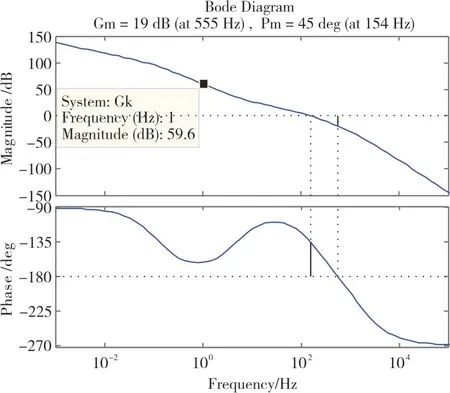
圖3 PI控制器作用下系統的開環Bode 曲線
3.2 平方PI控制器
控制器采用平方PI控制[7],傳遞函數為
圖4 為校正后系統開環Bode 曲線。其相位裕量為41.3deg,完全滿足工程中相位裕量在之間的要求,同樣其幅值裕量18.5dB,系統是穩定的。同時在頻率1.01Hz 處,系統開環Bode 曲線的幅頻特性80.1dB,可知,在平方PI 控制器作用下擾動對系統的影響在降低了80.1dB。
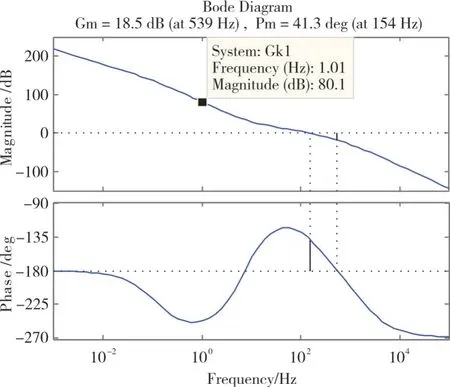
圖4 平方PI控制器作用下系統的開環Bode 曲線
3.3 不同控制器對比
不同頻率擾動對系統的最終影響在PI 控制器和平方PI控制器的作用下衰減對比情況見表1所示。

表1 不同頻率擾動在不同控制器下衰減情況表

表2 濾波前后統計表
平方PI 控制器對擾動隨頻率減小隔離效果逐漸增強。
4 角跟蹤回路設計
為降低視線角速度噪聲對低頻隔離度測試影響,提高視線角速度信噪比,對角跟蹤回路經PI 校正后,增加跟蹤微分器進行濾波處理,框圖如圖5所示。

圖5 角跟蹤回路跟蹤微分器框圖
4.1 跟蹤微分器原理
韓京清等通過離散系統最速控制的綜合函數給出非線性跟蹤微分器的離散形式,即[8]
式中:h 為積分步長;r為速度因子;h0為濾波因子;e(k)為跟蹤信號x1(k)與輸入位置信號r(k)的誤差,即e(k)= x1(k)-r(k);fhan 為離散系統的最速控制綜合函數,即
跟蹤微分器給系統會帶來一定的延時,可以進行補償[9],具體方法是將濾波的跟蹤信號加上預估步長乘以微分信號后作為輸入信號的近似信號,即
式中,n·h為預估時間,取值比濾波因子h0稍大。
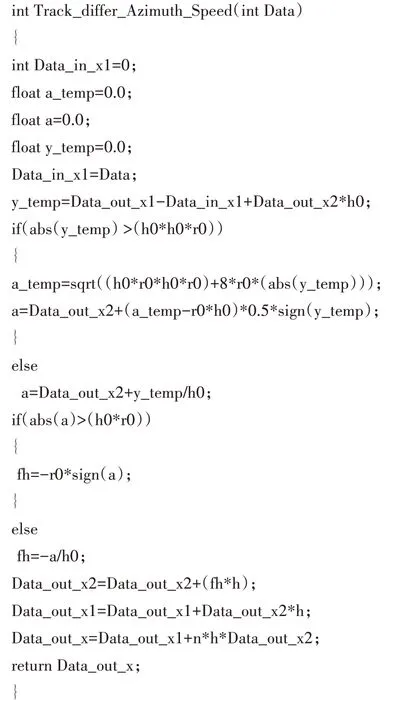
4.2 跟蹤微分器程序設計
跟蹤微分器C語言實現如下:
4.3 跟蹤微分器參數仿真
參數設置為h=0.01,r=15200,h0=0.05,n=1,其余初始狀態均為零。輸入r(k)=0.01*rand(1)時濾波前后對比結果如圖6所示,正弦信號(135Hz@1°)輸入時濾波后幅度為0.7216,相位延時60°,結果如圖7 所示。圖6 和圖7 中橫坐標為采樣點數,縱坐標為角度,單位為度(°)。
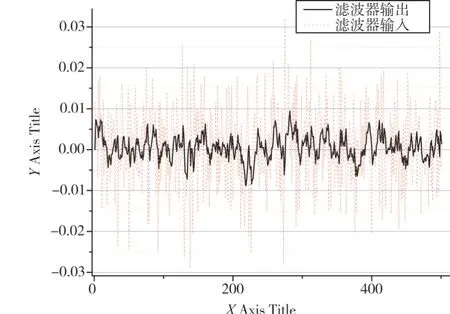
圖6 0.01噪聲濾波前后對比圖

圖7 跟蹤微分器濾波帶寬測試圖
5 試驗測試
5.1 試驗場地
在符合要求的微波暗室內進行,空間尺寸不小于8m×4m×4m。在目標模擬器和導引頭天線周圍2m內不應放置其他物體。
場地應無影響正常調試的電磁環境。導引頭試驗場地布局示意圖如圖8所示。
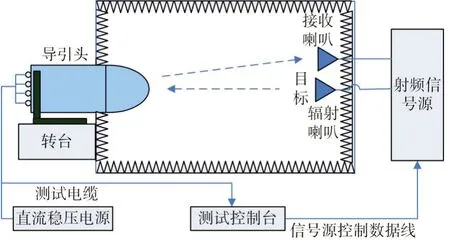
圖8 試驗場地布局及連接示意圖
5.2 隔離度測試
對普通PID 控制器和平方PI+跟蹤微分器控制進行隔離度對比測試,帶穩定平臺的導引頭安裝在轉臺上,穩定跟蹤目標后,控制轉臺分別以3Hz@1.5°、1Hz@1.5°、0.5Hz@1.5°進行正弦運動的擾動試驗,試驗測試數據如表3 所示。其中0.5Hz 的隔離度曲線如圖9和圖10所示。
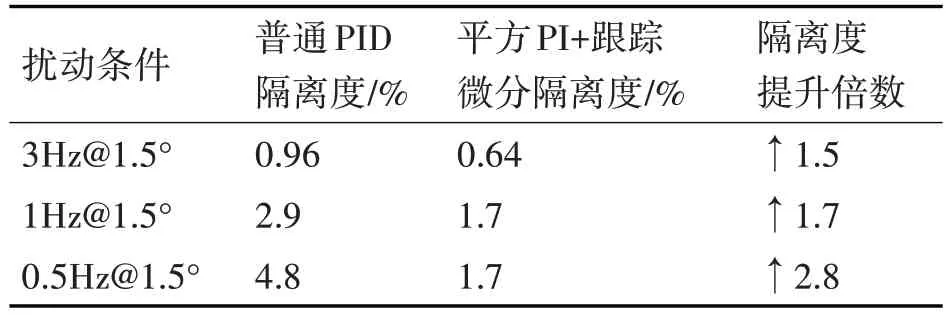
表3 兩種控制器隔離度測試對比表
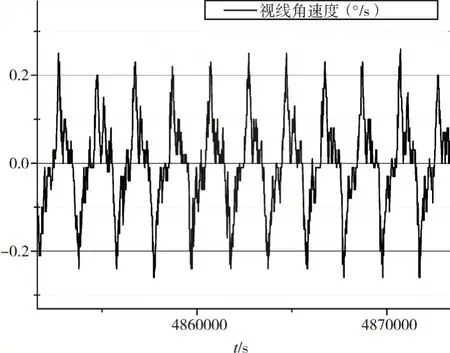
圖9 普通PID隔離度測試曲線
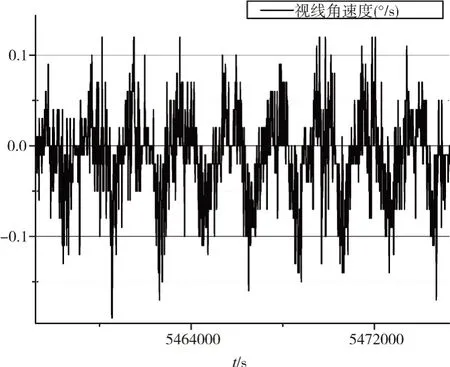
圖10 平方PI+跟蹤濾波器隔離度測試曲線
跟蹤濾波器和平方PI 控制器結合的控制方法對擾動隨頻率減小隔離效果逐漸增強。
6 結語
為了進一步提高穩定平臺的抗擾動能力,提出了一種跟蹤濾波器和平方PI 控制器結合的控制方法。通過試驗測試,驗證平臺的低頻擾動隔離度提升明顯,為工程實現提供了技術支撐。
