耳石癥治療系統模型設計與制作
2024-04-16 03:25:12熊威喻亞云孟令權武泱光何浩洋胡安正
電子制作 2024年6期
關鍵詞:系統
熊威,喻亞云,孟令權,武泱光,何浩洋,胡安正
(湖北文理學院 物理與電子工程學院,湖北襄陽,441053)
0 引言
如今隨著科學技術的迅速發展,智能化器械已經進入了醫療領域之中,各種技術在治療關于眩暈癥狀的疾病得到了廣泛地應用。良性陣發性位置性眩暈(BPPV)也叫耳石癥,它是一種眩暈性疾病[1]。耳石癥是因患者頭部迅速轉動進而激發短暫陣發性眩暈、眼震等癥狀,該種疾病是臨床常見眩暈疾病,其主要表現為短暫眩暈、眼震等,同時易引發耳部疾病的發生,出現內耳供血不足、老年性退行 性改變等并發癥,致使患者正常社會生活受到極大影響[2]。
耳石癥最根本、最有效的療法是,讓自動脫落的耳石“復位”。一般治療耳石癥的復位方法有兩種,一種是醫生使用診斷手法復位,另一種是使用儀器輸入指令進行自動復位。人工手法復位作為傳統的復位方法,雖然對一些簡單的耳石癥患者可以獲得較好的復位效果,但也存在諸多弊端。手法復位治療更多地依靠復位醫生的經驗和判斷,復位效果與經驗有很大關系;人工手法復位在治療過程中對患者眼球震顫的觀察主要依賴醫生肉眼觀察。相比之下,耳石復位儀可帶動人進行旋轉,進而使耳石位置角度的控制更加準確,并且也提高了復位的效率;無需過度耗費醫生體力。
對此,本文擬設計出一款高智能、功能全、易操作的智能化眩暈診療一體機,該機設置有多功能可選擇式的操控面板和友好交互的可視顯示屏,可以實現一鍵自動診療任務。該儀器一旦推廣應用必然會惠及一些鄉鎮級醫院和廣大的耳石癥患者,繼而也會帶來巨大的經濟和社會效益。
1 智能化眩暈診療一體機總體設計思路
本文實施方案的內容主要是治療儀變位方案。用戶在主控制器的控制界面可以手動選擇診斷模式、治療模式和傻瓜式一鍵操作自動選擇模式。在治療儀的變位裝置之中設計角度采集裝置,并將角度信息發送給主控制器。系統治療儀變位方案框圖如圖1 所示。
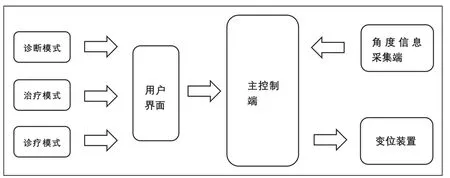
圖1 系統治療儀變位方案框圖
2 總體系統的器件選用及結構搭建
■2.1 主控端MCU 芯片
智能眩暈診療系統的主控MCU 采用了語法較為簡單、開發難度低的STM32 芯片,該芯片不僅降低了開發成本,還具有查詢速度快、容量大等優點,解決了大多數生產者兩者不能兼顧的問題。STM32 系列微控制器還提供了豐富的外設資源,包括模擬輸入輸出、數字輸入輸出、通信接口、定時器、中斷控制器等,可以滿足各種應用的需求。
■2.2 角度采集端MCU 芯片
該系統的角度采集端主控選用的是由宏晶公司(STC)推出的STC8A,該芯片擁有豐富的外設,包括多個定時器/計數器、多通道的ADC(模數轉換器)、UART(串行通信接口)、SPI(串行外設接口)等。考慮到角度采集端的數據處理量沒有主控的大,這些外設足以完成該系統對于姿態信息的采集與解算,并且可以與主控端進行數據的傳輸與通訊。故而使用該款芯片作為角度采集端的主控芯片。
■2.3 驅動模塊
本次項目使用A4988 驅動模塊來控制該系統的電機,如圖2 所示。本系統變位裝置中的電機選用步進電機,其角位移量(或直線位移量)與電脈沖數成正比,步進電機所承受的負載能力,不會根據電機的電壓擾動及環境條件所影響[3],選用A4988 模塊用于步進電機的驅動,主要考慮到了以下幾個優點:它采用直流電動機驅動技術,在精密步進電機驅動方面得到了大量的應用,具有多種控制方式,全橋式恒流電路和智能步進控制,可以滿足不同精度要求的電機控制需求。芯片具有低功耗,高功率,低噪音,高精度等特點,可以在體積小的條件下實現高精度的控制和穩定的輸出。

圖2 A4988模塊
■2.4 無線模塊
本次項目使用NRF24L01無線模塊用于本系統主控制端與角度信息采集端電路之間的信息傳輸。NRF24L01 是一種在2.4GHz~2.5GHz 頻帶中具有良好傳輸性能的無線發射或接收設備。它配備了頻率合成器、功率放大器、晶體振蕩器、調制器等功能模塊。輸出功率和通信信道可以通過程序進行配置,無線模塊如圖3 所示。

圖3 無線模塊
■2.5 主控制端電路
主控制端采用STM32 進行系統控制,該電路外設主要有下載電路、電源電路、電機驅動模塊、LCD 屏、無線模塊組成。主控制端電路實物圖如圖4 所示,電路圖如圖5 所示。STM32 系列微控制器采用了ARM Cortex-M 內核,提供了高速處理能力和豐富的外設資源,可以滿足各種應用的需求。對于下載電路來講,是通過STM32 芯片固有的下載引腳使用ST-LINK 下載程序。當BOOT0 為1,而BOOT1為0 時STM32 進入下載模式,該電路在程序下載時,會使BOOT0 拉高并進入下載模式,程序下載完成后,BOOT0 拉低進入程序運行模式。對于電源電路的設計,診療系統的電源芯片選用LM2596-5V 芯片和LMS1117-3V3 芯片,它們分別是5V 開關電源穩壓芯片和3V3 線性穩壓芯片。

圖4 主控制端電路實物圖

圖5 主控制端電路圖
■2.6 角度信息采集端電路
角度信息采集端電路采用STC8A 芯片進行角度信號采集。角度信息采集電路實物圖如圖6 所示,電路圖如圖7 所示。該電路主要包括MPU6050 模塊、無線模塊等。MPU6050 模塊可以將機械旋轉或傾斜轉化為電信號輸出。信號放大器用于放大傳感器輸出的微弱信號,增強信號的穩定性和可靠性。數據處理器則用于對放大后的信號進行數字化處理,將角度信息轉化為數字信號輸出[4]。將該模塊放置在變位裝置的中心角度,即可監測變位裝置的旋轉角度。

圖6 角度信息采集電路實物圖

圖7 角度信息采集電路圖
3 系統的軟件部分設計
■3.1 本章概述
智能眩暈診療系統軟件設計的介紹:首先從界面設計分析了三種模式對應的功能。其次,需要根據角度信息的反饋從而控制步進電機的轉動。軟件設計結構圖如圖8 所示。

圖8 整體軟件設計圖
■3.2 控制系統的界面顯示
控制系統的界面顯示是使用LCD液晶顯示屏進行顯示。本系統在液晶屏中設置三個選項“診斷”“復位”和“診療”。這三種模式避免過多的文字和圖標,方便用戶快速定位和使用。對于“診斷”和“復位”選項可由專業醫生依據患者癥狀初步判斷耳石癥類型,并進行耳石癥復位。而“診療”選項為“一鍵傻瓜式”自動診療,無需專業醫生進行操作。系統界面顯示如圖9 示。

圖9 系統界面顯
■3.3 步進電機旋轉控制算法
本系統使用的是PID 算法來控制步進電機的旋轉。步進電機是一種將電能轉化為機械能的電機,其轉動角度由輸入的電脈沖數量決定。由于步進電機本身的慣性及其承載的負載,電機在運行過程中無法立即啟動和停止,而是在啟動過程中會出現階躍損失,在關閉過程中會發生階躍[5]。因此,為了準確控制電機的旋轉角度,需要一個角度信息的反饋,從而實現閉環控制的效果。PID 算法是控制類最廣泛的算法之一。在涉及閉環系統的控制中,它可以對輸出的結果進行自動準確的校正[6],所以本系統使用PID 控制算法來控制步進電機的旋轉。
■3.4 角度姿態解算
本文采用卡爾曼濾波算法,卡爾曼姿態解算結構圖如圖10 所示。使用RT-Thread 國產操作系統,利用env 工具進行串口、模擬I2C 環境配置,使用10ms 的線程進行卡爾曼濾波解算。因為MPU6050 沒有包含磁力計,故無法對yaw軸運用卡爾曼濾波算法。利用MPU6050 中加速度傳感器采集到的xyz 軸的加速度和陀螺儀采集到的xyz 軸的角速度,進行進一步處理,得到pitch 軸和roll 軸的原始角度,利用原始角度和角速度進行卡爾曼濾波處理,最終得到濾波后的角度數據。
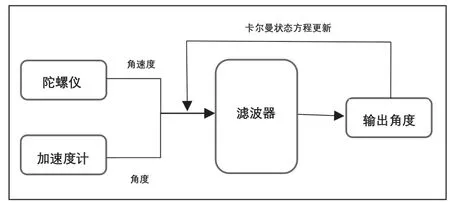
圖10 卡爾曼姿態解算結構圖
4 結束語
智能化眩暈診療一體機是一種集診斷、治療和康復于一體的醫療設備。它可以通過多種傳感器和算法對患者的眩暈癥狀進行評估和診斷,并提供個性化的治療和康復方案。本文采用了步進電機、無線模塊、MPU6050 模塊、微處理器等模塊設計出一款低成本、高智能、功能全、標準化、易操作的智能化眩暈診療一體機。但是由于時間和目前能力的有限,針對1:1 實物模型制造難度較大,只能制作小模型進行演示。智能眩暈診療系統的研究和應用已經逐漸復現在人們的眼前,這些醫療系統的設計需要具備足夠的應變能力。相信隨著醫療技術和電子控制技術的不斷發展,智能眩暈診療系統在未來能發揮更大的作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
