嵌入式實(shí)時(shí)控制三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)的構(gòu)建
2024-04-18 03:50:20藺鳳琴賈瑞哲李香泉車偉杰
實(shí)驗(yàn)室研究與探索 2024年1期
關(guān)鍵詞:嵌入式實(shí)驗(yàn)
藺鳳琴, 賈瑞哲, 李 擎, 郭 金, 李香泉, 車偉杰
(1.北京科技大學(xué)自動(dòng)化學(xué)院,北京 100083;2.景德鎮(zhèn)學(xué)院信息工程學(xué)院,江西景德鎮(zhèn) 333000)
0 引 言
嵌入式技術(shù)以應(yīng)用為核心,基于計(jì)算機(jī)技術(shù),適用于軟硬件共存的設(shè)備或系統(tǒng),也是自動(dòng)化類專業(yè)的重要技術(shù)課程。但它易于上手,卻難以精通[1-3]。數(shù)控滑臺(tái)是數(shù)控機(jī)床中的常見設(shè)備,通過編程,鏈接電機(jī)、感應(yīng)裝置等,控制滑臺(tái)模組按照軟件設(shè)定程序執(zhí)行運(yùn)動(dòng)作業(yè)、任務(wù),大大提升了加工精度和生產(chǎn)效率。三軸數(shù)控滑臺(tái)則構(gòu)建了三維空間的工件加工,適用于工業(yè)中多數(shù)的加工場(chǎng)景。隨著機(jī)電一體化的推進(jìn),嵌入式技術(shù)也被廣泛用于數(shù)控滑臺(tái)上。特別是在組合機(jī)床生產(chǎn)控制中,嵌入式技術(shù)通用性高、可靠性高、支持復(fù)雜指令的優(yōu)點(diǎn)更為顯著[4-5]。目前,基于二維空間設(shè)計(jì)的兩軸嵌入式滑臺(tái)實(shí)驗(yàn)平臺(tái)對(duì)于飛速發(fā)展的嵌入式技術(shù)深層次應(yīng)用開發(fā)顯得力不從心;并且傳統(tǒng)嵌入式數(shù)控滑臺(tái)的控制系統(tǒng)是針對(duì)特定任務(wù)而定制、固化的軟件,運(yùn)行過程中無法實(shí)時(shí)進(jìn)行參數(shù)優(yōu)化,難以適應(yīng)實(shí)際設(shè)備的快速響應(yīng)需求;此外,傳統(tǒng)嵌入式系統(tǒng)實(shí)驗(yàn)教學(xué)平臺(tái)比較單一,一般采用實(shí)驗(yàn)箱、PC終端上位機(jī),授課空間有限、教學(xué)效率不高。
鑒于以上原因,本文以三軸數(shù)控滑臺(tái)為載體,構(gòu)建了集成實(shí)時(shí)控制的嵌入式三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)。旨在讓學(xué)生對(duì)實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)和運(yùn)行有深入的理解和認(rèn)識(shí)[6-7],同時(shí)基于平臺(tái)開展嵌入式編程、電機(jī)運(yùn)動(dòng)控制、視覺伺服及圖像識(shí)別等相關(guān)課題的研究。此外,平臺(tái)設(shè)計(jì)與產(chǎn)線實(shí)際應(yīng)用相結(jié)合,可實(shí)時(shí)修改參數(shù)進(jìn)行在線控制,學(xué)生除了學(xué)習(xí)硬件的嵌入式編程,還可以通過軟件對(duì)數(shù)控滑臺(tái)進(jìn)行在線監(jiān)控與實(shí)時(shí)控制[8-10]。
1 實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
1.1 平臺(tái)技術(shù)目標(biāo)
實(shí)驗(yàn)平臺(tái)主要包含如下技術(shù)目標(biāo):
(1)C語言嵌入式編程。采用C語言完成滑臺(tái)主控器(Advanced RISC Machine,ARM)核芯片的程序,讓學(xué)生了解嵌入式編程的特點(diǎn),體會(huì)高級(jí)編程語言——C語言對(duì)硬件的直接操作能力。
(2)三軸電動(dòng)機(jī)協(xié)同運(yùn)動(dòng)。采用定時(shí)器輸出脈沖頻率來控制電動(dòng)機(jī)運(yùn)行速度,電動(dòng)機(jī)的加速控制則選用次平滑型S型加速,實(shí)現(xiàn)三軸協(xié)同運(yùn)動(dòng)。此外,三軸圓弧、直線的插補(bǔ)運(yùn)動(dòng)設(shè)計(jì)以完成復(fù)雜的滴膠運(yùn)動(dòng),定位精度達(dá)(0.01 mm)。
(3)三軸運(yùn)行時(shí)參數(shù)實(shí)時(shí)優(yōu)化。通過PC 端人機(jī)界面(Human Machine Interface,HMI)和移動(dòng)端APP,在線監(jiān)控三軸的運(yùn)行時(shí)參數(shù),可實(shí)時(shí)對(duì)各軸的運(yùn)動(dòng)方向、是否歸零、步進(jìn)速度以及步進(jìn)距離等進(jìn)行調(diào)整,以實(shí)現(xiàn)最佳目標(biāo)運(yùn)動(dòng)軌跡。
1.2 總體架構(gòu)
嵌入式三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)構(gòu)建了集軟硬件及數(shù)據(jù)存儲(chǔ)于一體的三維運(yùn)動(dòng)滴膠平臺(tái),通過三軸的協(xié)同運(yùn)動(dòng)完成滴膠,形成既定圖形的產(chǎn)品。滴膠工藝主要用于包裝、商標(biāo)、冰箱貼和汽車裝飾等工藝品的制作。該平臺(tái)由5 部分組成:①三軸的步進(jìn)電動(dòng)機(jī)及驅(qū)動(dòng)套件,實(shí)現(xiàn)各軸獨(dú)立運(yùn)動(dòng)、插補(bǔ)運(yùn)動(dòng);②控制器為STM32F4(STMicroelectronics)系列的ARM 核芯片,采用C語言嵌入式編程;③配備高清攝像頭以及相應(yīng)的圖像識(shí)別功能,方便學(xué)生進(jìn)行二次開發(fā),如用于實(shí)現(xiàn)完善的運(yùn)動(dòng)物體目標(biāo)識(shí)別及運(yùn)動(dòng)控制;④上位機(jī)軟件提供PC終端及手機(jī)終端2 種模式的部署,并支持WiFi和藍(lán)牙的連接;⑤數(shù)據(jù)存儲(chǔ)分為兩大類,均部署在PC終端,設(shè)備參數(shù)及實(shí)驗(yàn)案例歷史數(shù)據(jù)采用oracle 數(shù)據(jù)庫,運(yùn)動(dòng)中的過程數(shù)據(jù)以txt文本文件形式存儲(chǔ)。總體架構(gòu)如圖1 所示。

圖1 嵌入式實(shí)時(shí)控制三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)總體架構(gòu)
1.3 軟硬件配置
平臺(tái)軟硬件的選取充分考慮了工程實(shí)踐的需求,配置見表1 所示。

表1 實(shí)驗(yàn)平臺(tái)軟硬件配置
1.4 實(shí)驗(yàn)平臺(tái)實(shí)物
三軸數(shù)控滑臺(tái)包含多種結(jié)構(gòu),3 個(gè)移動(dòng)軸由電動(dòng)機(jī)進(jìn)行控制,高清攝像頭與滴膠管放置在Z方向的移動(dòng)軸上,用于捕捉視覺信息并進(jìn)行滴膠。滑臺(tái)具備串口、USB等多種接口,學(xué)生可編寫工程文件并通過接口控制滑臺(tái)的運(yùn)行過程。嵌入式實(shí)時(shí)控制三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)實(shí)物如圖2 所示。

圖2 嵌入式實(shí)時(shí)控制三軸數(shù)控滑臺(tái)實(shí)驗(yàn)平臺(tái)實(shí)物
2 實(shí)驗(yàn)平臺(tái)功能設(shè)計(jì)
2.1 三軸移動(dòng)設(shè)計(jì)
三軸數(shù)控滑臺(tái)的Z軸裝有滴膠管,Y軸可以帶動(dòng)待滴膠的物體移動(dòng),因此滑臺(tái)工作時(shí)需要3 個(gè)軸進(jìn)行協(xié)同運(yùn)動(dòng)使得滴膠管和物體達(dá)到指定位置。為確保三軸運(yùn)動(dòng)的位置足夠精確,本平臺(tái)采用定時(shí)器模塊來實(shí)現(xiàn)該要求,通過輸出脈沖頻率調(diào)制波形,控制定時(shí)器的輸出頻率,進(jìn)而控制電動(dòng)機(jī)的運(yùn)行速度,最后保證電動(dòng)機(jī)的S型加速控制,即將加速度以S 型加速的形式表現(xiàn)。
完全平滑型S型加速雖然維護(hù)了變加速到勻加速階段過程的平滑性,但由于加加速度的計(jì)算過程復(fù)雜,并不適用于速度需要更換的場(chǎng)合,因此在電動(dòng)機(jī)加速上選擇次平滑型S型加速,這種方式雖然犧牲了變加速到勻加速階段的平滑性,但加加速度的計(jì)算過程方便[11]。其加速過程如圖3 所示。

圖3 S型加速示意圖
S型加速的具體過程較為復(fù)雜,共分為如下4 個(gè)步驟:
步驟1 將所有關(guān)于速度的單位轉(zhuǎn)換為頻率的單位,即
式中:f為脈沖頻率,Hz;S為電動(dòng)機(jī)的線速度,m/s;vf為速度頻率轉(zhuǎn)換系數(shù)。
步驟2 電動(dòng)機(jī)加速和減速過程按比例3∶4∶3分為3 部分,同時(shí)確認(rèn)S型加速的加加速度頻率
式中:faa為加加速度頻率,Hz;C為加加速度,m/s3;a為加速度,m/s2;t0.3為加加速的持續(xù)時(shí)間,s,其中,t0.3=0.3 ×[(S-Sstart)/a],S表示最高速度(m/s),Sstart表示初始速度(m/s)。
步驟3 將加速過程分為3 部分,其中加加速部分taa,勻加速部分tua和減加速部分tra的比例為30∶60∶45。同樣,減速過程也分為3 部分,加減速部分tar,勻減速部分tur和減減速部分trr的比例為45∶60∶30。
步驟4 根據(jù)速度設(shè)置每步的頻率表和脈沖數(shù)目表。
2.2 三軸插補(bǔ)設(shè)計(jì)
在滴膠運(yùn)行過程中,滴膠管需要進(jìn)行一些復(fù)雜的非直線運(yùn)動(dòng),如圓弧運(yùn)動(dòng)。三軸需依據(jù)已有參數(shù)進(jìn)行插補(bǔ),運(yùn)動(dòng)插補(bǔ)是一個(gè)實(shí)時(shí)的數(shù)據(jù)密化過程,基本原理是根據(jù)給定的信息進(jìn)行數(shù)值計(jì)算,實(shí)時(shí)輸出參與插補(bǔ)運(yùn)動(dòng)各軸的控制參數(shù),如加速度、位移等,繼而驅(qū)動(dòng)各軸電動(dòng)機(jī)進(jìn)行協(xié)同運(yùn)動(dòng),使3 個(gè)運(yùn)動(dòng)軸按照理想的路線和速度運(yùn)行[12-13]。平臺(tái)采用了直線插補(bǔ)和圓弧插補(bǔ)2 種方式,定位精度為±0.01 mm,達(dá)同類產(chǎn)品先進(jìn)水平。本文僅用XY軸插補(bǔ)進(jìn)行分析,YZ軸與XZ軸插補(bǔ)同理。
(1)圓弧插補(bǔ)運(yùn)動(dòng)。該運(yùn)動(dòng)依靠步進(jìn)電動(dòng)機(jī)逐漸走出一個(gè)帶鋸齒的近似圓。其工作原理借助了圓的代數(shù)方程X2+Y2=R2,由于圓弧插補(bǔ)從實(shí)際執(zhí)行效果上表現(xiàn)為橫向和縱向的累加算法,因此,路徑內(nèi)/路徑外將代替圓內(nèi)/圓外。
其中,三點(diǎn)法確認(rèn)圓心和半徑位置是關(guān)鍵,設(shè)X、Y軸當(dāng)前位置為(X0,Y0),目標(biāo)點(diǎn)位置為(Xθ,Yθ),輔助點(diǎn)位置為(XAssist,YAssist),則圓心與半徑位置計(jì)算式為
式中:corex=(ε×B-K×ω)/(λ ×B-A×ω);corey=(A×ε-K×λ)/(A×f-B×λ)。其中:
(corex,corey)為圓心坐標(biāo),R為半徑(m)。1/4 圓弧的插補(bǔ)運(yùn)動(dòng)程序流程和路徑如圖4 所示。
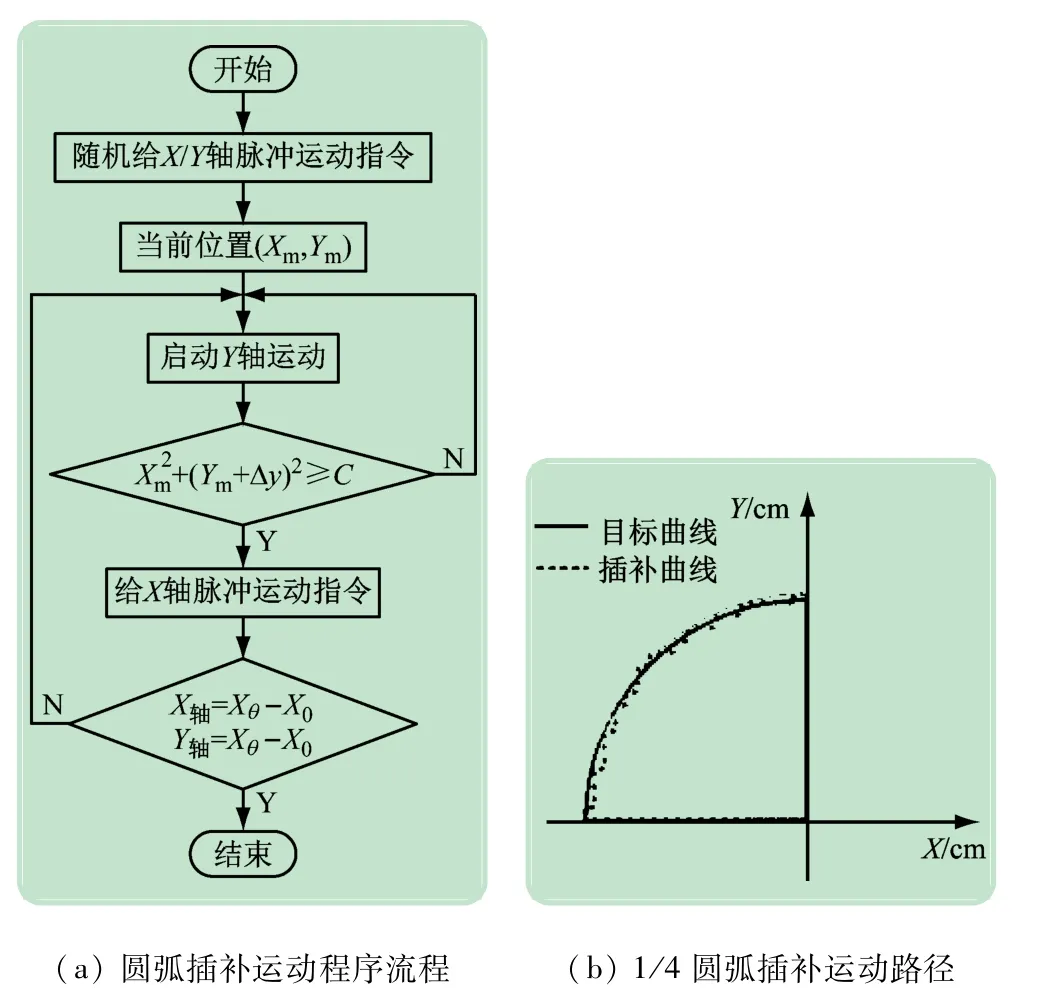
圖4 1/4圓弧插補(bǔ)運(yùn)動(dòng)程序流程和插補(bǔ)路徑
(2)直線插補(bǔ)運(yùn)動(dòng)。數(shù)控滑臺(tái)依據(jù)軟件下發(fā)的“目標(biāo)點(diǎn)位(Xθ,Yθ)”“直線插補(bǔ)命令項(xiàng)(XY,YZ,XZ)”和“速度”參數(shù),進(jìn)行直線插補(bǔ)運(yùn)動(dòng)。運(yùn)動(dòng)過程流程同圓弧插補(bǔ)運(yùn)動(dòng)。程序流程和第一象限直線插補(bǔ)路徑如圖5 所示。

圖5 直線插補(bǔ)運(yùn)動(dòng)程序流程和直線插補(bǔ)運(yùn)動(dòng)路徑
2.3 平臺(tái)HMI設(shè)計(jì)
作為教學(xué)實(shí)驗(yàn)平臺(tái)HMI的設(shè)計(jì),既要覆蓋課程知識(shí)點(diǎn),又要采用先進(jìn)的現(xiàn)代工具和流行的應(yīng)用模式,使平臺(tái)升級(jí)具備可持續(xù)性。因此,HMI 設(shè)計(jì)除基于傳統(tǒng)的PC端部署模式外,還提供了移動(dòng)端的APP。
(1)PC 端HMI 設(shè)計(jì)。采用模塊式設(shè)計(jì),主要包括控制器連接模塊、參數(shù)設(shè)置模塊、程序編輯模塊和直線圓弧插補(bǔ)模塊等。HMI 軟件基于Anaconda、PyCharm平臺(tái),采用Python 語言,PC 終端部署環(huán)境最低要求:Windows 7 64 bit 操作系統(tǒng),Intel i5 處理器,4 GB及以上內(nèi)存。
(2)移動(dòng)端APP 設(shè)計(jì)。移動(dòng)端APP 的設(shè)計(jì)源于智能手機(jī)應(yīng)用的不斷深入,模塊設(shè)計(jì)與PC 端一致,APP選用Android Studio 開發(fā)平臺(tái),平臺(tái)的配置為Windows 7 64 bit操作系統(tǒng),Intel i5 處理器CPU,8 GB內(nèi)存,50 GB硬盤,推薦使用固態(tài)硬盤及無線網(wǎng)卡、攝像頭、USB、麥克風(fēng)等。移動(dòng)端運(yùn)行環(huán)境為安卓系統(tǒng)5.0 以上,下載軟件所需內(nèi)存10 MB。APP 主界面顯示藍(lán)牙連接設(shè)置及菜單欄,其中菜單欄如圖6 所示。
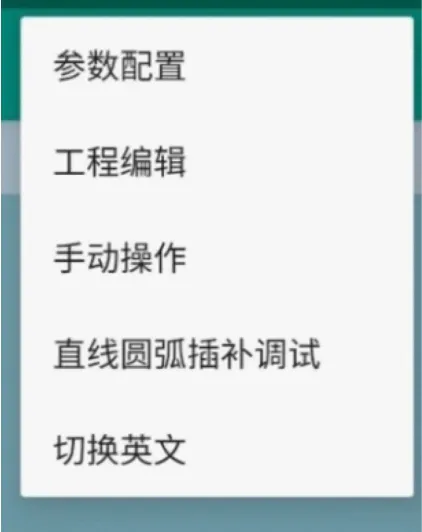
圖6 APP系統(tǒng)主界面的菜單欄
用移動(dòng)端開展實(shí)驗(yàn)時(shí),首先獲取手機(jī)的藍(lán)牙權(quán)限,搜索本機(jī)以前配對(duì)和未配對(duì)的設(shè)備,顯示在相應(yīng)列表。選擇目標(biāo)設(shè)備進(jìn)行配對(duì)后,進(jìn)入菜單欄。依據(jù)實(shí)驗(yàn)需求,進(jìn)入相應(yīng)模塊,其中參數(shù)設(shè)置模塊主要進(jìn)行各軸行程、原點(diǎn)及速度等參數(shù)的編輯,程序編輯模塊可在線讀取、修改和下載程序,如圖7 所示。

圖7 移動(dòng)端APP程序編輯界面
移動(dòng)端APP 的開發(fā)和應(yīng)用突破了傳統(tǒng)教學(xué)實(shí)驗(yàn)平臺(tái)的互動(dòng)模式,開放的源代碼為學(xué)生提供了二次開發(fā)和升級(jí)的基礎(chǔ),基于興趣對(duì)相關(guān)知識(shí)點(diǎn)及實(shí)踐進(jìn)行深度探索[14-15]。
3 實(shí)時(shí)控制
滑臺(tái)主控器ARM核芯片的程序主要通過C 語言來實(shí)現(xiàn),讓學(xué)生嵌入式編程中體會(huì)C 語言對(duì)硬件的直接操作能力。除了具備下載特定程序以完成定制運(yùn)動(dòng)軌跡外,平臺(tái)提供了PC 終端和移動(dòng)終端2 種上位機(jī)模式,對(duì)三軸的運(yùn)行時(shí)參數(shù)進(jìn)行實(shí)時(shí)監(jiān)控并在線修改。
3.1 與下位機(jī)實(shí)時(shí)通信
通信是數(shù)控系統(tǒng)穩(wěn)定運(yùn)行的基礎(chǔ),它將平臺(tái)各個(gè)部分有機(jī)地結(jié)合起來,通過信息和數(shù)據(jù)的傳遞,協(xié)同運(yùn)轉(zhuǎn)。為使平臺(tái)的實(shí)驗(yàn)教學(xué)具有普適性,該平臺(tái)支持以太網(wǎng)、WiFi和藍(lán)牙3 種通信方式。其中藍(lán)牙連接采用MODBUS-RTU 協(xié)議,其余采用MODBUS-TCP/IP協(xié)議[16]。
(1)MODBUS-TCP/IP 協(xié)議。在TCP/IP 協(xié)議中,一條完整的報(bào)文由MBAP 報(bào)文頭和幀結(jié)構(gòu)PDU 兩部分構(gòu)成,如圖8 所示。

圖8 移動(dòng)端APP采用以太網(wǎng)、WiFi通信的MODBUSTCP/IP報(bào)文結(jié)構(gòu)
上位機(jī)組件發(fā)送報(bào)文時(shí),將要發(fā)送的數(shù)據(jù)整合為幀結(jié)構(gòu)PDU,隨后動(dòng)態(tài)形成MBAP 報(bào)文頭,將兩者拼接為一條完整的報(bào)文并通過以太網(wǎng)或WIFI 發(fā)送至下位機(jī)。下位機(jī)依據(jù)報(bào)文頭進(jìn)行解析核對(duì),讀取幀結(jié)構(gòu)中的數(shù)據(jù)并執(zhí)行相應(yīng)的功能,最后向上位機(jī)返回響應(yīng)報(bào)文。
(2)MODBUS-RTU 協(xié)議。基于藍(lán)牙連接的MODBUS-RTU報(bào)文結(jié)構(gòu)如圖9 所示。

圖9 移動(dòng)端APP采用藍(lán)牙通信的MODBUS-RTU報(bào)文結(jié)構(gòu)
RTU 的連接速度快,但安全性較低,因此需要校驗(yàn)碼來保證傳輸數(shù)據(jù)的準(zhǔn)確性。當(dāng)上位機(jī)組件發(fā)送報(bào)文時(shí),將數(shù)據(jù)信息與通過CRC算法得到的校驗(yàn)碼組件為完整的報(bào)文。當(dāng)下位機(jī)收到后,首先會(huì)自行計(jì)算校驗(yàn)碼并對(duì)收到的校驗(yàn)碼進(jìn)行核對(duì),確認(rèn)無誤后再執(zhí)行命令。
3.2 三軸移動(dòng)在線控制
三軸協(xié)同運(yùn)動(dòng)是滑臺(tái)的基本運(yùn)動(dòng),控制電動(dòng)機(jī)使各軸快速而準(zhǔn)確地到達(dá)相應(yīng)位置是關(guān)鍵。通過參數(shù)設(shè)置界面確定各軸的脈沖當(dāng)量和加速度,上位機(jī)與控制器連接后,該界面以在線參數(shù)進(jìn)行初始化,可以對(duì)各參數(shù)進(jìn)行修改并寫入控制器,實(shí)時(shí)觀察參數(shù)對(duì)各軸運(yùn)動(dòng)控制的影響。此外,為使學(xué)生能夠更深入地參與三軸協(xié)同運(yùn)動(dòng)調(diào)試過程,獲得最佳運(yùn)動(dòng)軌跡,加強(qiáng)對(duì)電動(dòng)機(jī)運(yùn)動(dòng)原理的理解,HMI 提供了手動(dòng)操作界面,用于實(shí)時(shí)調(diào)整各軸運(yùn)行參數(shù),如各軸的運(yùn)動(dòng)方向、是否歸零、手動(dòng)速度以及步進(jìn)距離等,三軸電動(dòng)機(jī)控制界面如圖10 所示。

圖10 三軸電動(dòng)機(jī)控制界面
3.3 三軸插補(bǔ)在線控制
滴膠過程中,為實(shí)現(xiàn)復(fù)雜非直線運(yùn)動(dòng)軌跡,需通過三軸插補(bǔ)來完成。在直線圓弧插補(bǔ)界面,修改各軸位置、插補(bǔ)速度以及各軸段點(diǎn)和終點(diǎn)位置,來完成某2 軸的直線或圓弧插補(bǔ)運(yùn)動(dòng)。電動(dòng)機(jī)運(yùn)動(dòng)軌跡的過程數(shù)據(jù)以文本形式輸出并保存,便于后期比對(duì)分析。X、Y軸圓弧插補(bǔ)參數(shù)及運(yùn)動(dòng)軌跡數(shù)據(jù)如圖11 所示。

圖11 三軸插補(bǔ)界面
4 應(yīng)用效果
某實(shí)驗(yàn)案例要求、步驟及結(jié)果如下:
(1)實(shí)驗(yàn)要求。通過HMI 配置串口參數(shù)并連接控制器,根據(jù)指定的起始、終點(diǎn)坐標(biāo),實(shí)時(shí)修改各軸運(yùn)行時(shí)參數(shù),三軸協(xié)同快速、準(zhǔn)確到達(dá)終點(diǎn)位置進(jìn)行滴膠。其起始坐標(biāo):X、Y、Z(0.000,0.000,0.000),終點(diǎn)坐標(biāo):X、Y、Z(100.000,0.000,50.000)。
(2)實(shí)驗(yàn)步驟。具體的實(shí)驗(yàn)步驟如下:
步驟1 配置串口參數(shù)并連接控制器。配置文件保存末次連接成功的串口及其參數(shù),如圖12 所示,根據(jù)需要修改參數(shù)并連接控制器。
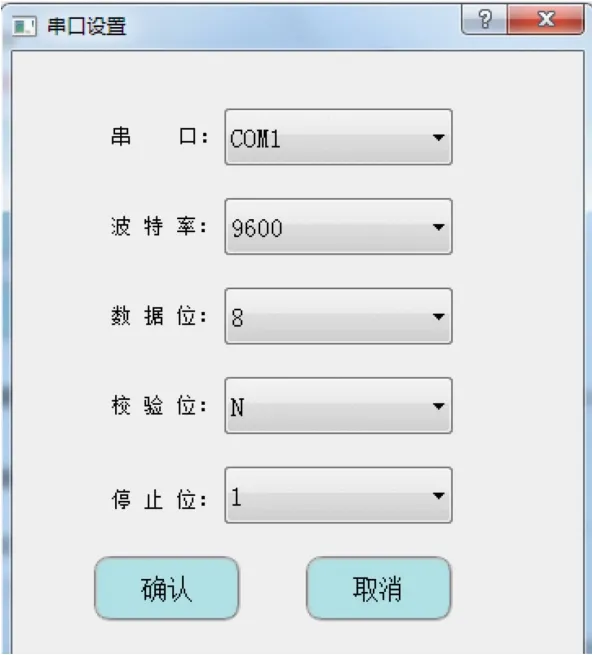
圖12 串口及其參數(shù)配置圖
步驟2 各軸復(fù)位。設(shè)置各軸回原點(diǎn)的速度為100 mm/s,設(shè)置各軸回原點(diǎn)的方向,并啟動(dòng)回原點(diǎn)。
步驟3X軸獨(dú)立運(yùn)動(dòng)。確認(rèn)各軸復(fù)位后,設(shè)置X軸運(yùn)動(dòng)參數(shù):獨(dú)立運(yùn)動(dòng)速度為10 mm/s,加速度為50 mm/s,運(yùn)動(dòng)距離為100 mm,參數(shù)寫入控制器。耗時(shí)2 ~3 s 后,X軸停止運(yùn)動(dòng),此時(shí)X、Y、Z的坐標(biāo)為(100.008,0.005,-0.007)。X、Y、Z各軸定位精度分別為+0.008 mm、+0.005 mm、-0.007 mm。
步驟4Y、Z軸圓弧插補(bǔ)運(yùn)動(dòng)。起點(diǎn)坐標(biāo)為(0.000,0.000),終點(diǎn)坐標(biāo)為(0.000,50.000),圓弧某中點(diǎn)坐標(biāo)為(25.000,25.000),速度為25 mm/s,參數(shù)寫入控制器。耗時(shí)2 ~3 s 后,Y、Z的坐標(biāo)為(0.009,50.006)。Y、Z各軸定位精度分別為+0.009、+0.006 mm。
至此,X、Y、Z終點(diǎn)坐標(biāo)為(100.008,0.009,50.006),耗時(shí)4 ~5 s,各軸定位精度分別為+0.006、+0.009 和+0.006 mm。平臺(tái)的實(shí)時(shí)性滿足三軸快速定位的需求,各軸的定位精度均在(0.01 mm,滿足三軸協(xié)同運(yùn)動(dòng)的精準(zhǔn)要求。
5 結(jié) 語
本文構(gòu)建了以三軸數(shù)控滑臺(tái)為載體,采用C 語言嵌入式編程完成主控器ARM 核芯片程序,并集成在線控制學(xué)習(xí)系統(tǒng)的實(shí)驗(yàn)平臺(tái)。通過教學(xué)實(shí)踐表明:控制對(duì)象具有普適性,即三軸數(shù)控滑臺(tái)構(gòu)建了三維運(yùn)動(dòng)空間工件的加工,適用于工業(yè)數(shù)控加工領(lǐng)域普遍的應(yīng)用場(chǎng)景;控制過程具有實(shí)時(shí)性,即集成在線控制學(xué)習(xí)系統(tǒng),實(shí)時(shí)監(jiān)控三軸運(yùn)行時(shí)參數(shù),并進(jìn)行在線修改,實(shí)現(xiàn)過程的精準(zhǔn)控制;開發(fā)工具具有先進(jìn)性,即基于C 語言嵌入式編程、Anaconda3 、PyCharm(2017.3.2)、Android Studio(3.4.1,內(nèi)置1.8 版本JDK)開發(fā)平臺(tái),采用Python 語言(3.6)、IntelliJ IDEA 的Java 語言,結(jié)合Oracle(12Cc 標(biāo)準(zhǔn)版)數(shù)據(jù)庫完成平臺(tái)構(gòu)建。
該平臺(tái)已在本校自動(dòng)化專業(yè)的實(shí)驗(yàn)教學(xué)中應(yīng)用,提升了學(xué)生在硬件、嵌入式編程方面能力;還促進(jìn)學(xué)生轉(zhuǎn)變思維,從用戶的角色出發(fā),設(shè)計(jì)在線控制軟件、激發(fā)其學(xué)習(xí)興趣,以實(shí)際產(chǎn)線需求來促進(jìn)相關(guān)課程的教學(xué)效果。同時(shí),提高學(xué)生畢業(yè)后角色轉(zhuǎn)變的效率,滿足培養(yǎng)社會(huì)緊缺技能型人才的需求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:23
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
單片機(jī)與嵌入式系統(tǒng)應(yīng)用(2014年9期)2014-03-11 15:35:13

- 實(shí)驗(yàn)室研究與探索的其它文章
- 高校實(shí)驗(yàn)隊(duì)伍崗前培訓(xùn)共同體建設(shè)的一體化探究
- 中性鹽霧試驗(yàn)標(biāo)準(zhǔn)研究進(jìn)展
- 干式空心電抗器匝間過電壓絕緣檢測(cè)實(shí)驗(yàn)虛擬仿真教學(xué)系統(tǒng)設(shè)計(jì)與開發(fā)
- 結(jié)構(gòu)實(shí)驗(yàn)綜合實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
- 體感交互式智能型機(jī)械臂實(shí)驗(yàn)教學(xué)平臺(tái)開發(fā)
- 西藏傳統(tǒng)塑繪顏料耐受性影響的實(shí)驗(yàn)研究