盾構(gòu)機(jī)減速器多級(jí)行星齒輪磨損狀態(tài)檢測
2024-04-24 10:11:29馬帥
工程機(jī)械與維修 2024年1期
馬帥

摘要:齒輪運(yùn)行狀況直接關(guān)系到盾構(gòu)機(jī)減速器工作質(zhì)量,為了保證其正常工作,需針對(duì)盾構(gòu)機(jī)制減速器多級(jí)行星齒輪磨損狀態(tài)進(jìn)行定期檢測。針對(duì)齒輪進(jìn)行檢測方法的設(shè)計(jì),首先通過平移不變量小波降噪方法對(duì)減速器多級(jí)行星齒輪振動(dòng)信號(hào)進(jìn)行降噪處理,設(shè)置自適應(yīng)局部閾值,分割出齒輪圖像嚙合區(qū),最后檢測點(diǎn)蝕區(qū)域。
關(guān)鍵詞:盾構(gòu)機(jī)減速器;盾構(gòu)機(jī);齒輪磨損;多級(jí)行星齒輪
0? ?引言
盾構(gòu)機(jī)在地下工程建設(shè)中發(fā)揮著越來越重要的作用,減速器作為盾構(gòu)機(jī)的核心部件,其運(yùn)行狀態(tài)直接影響到盾構(gòu)機(jī)的性能和安全性。多級(jí)行星齒輪作為減速器的重要組成部分之一,其磨損狀態(tài)對(duì)減速器的性能和壽命具有重要影響。而對(duì)盾構(gòu)機(jī)減速器多級(jí)行星齒輪磨損狀態(tài)進(jìn)行檢測,則對(duì)于保障盾構(gòu)機(jī)的正常運(yùn)行,提高地下工程建設(shè)的安全性和效率具有重要意義。
傳統(tǒng)的行星齒輪磨損狀態(tài)檢測有2種:一是通過監(jiān)測風(fēng)機(jī)齒輪油指標(biāo)評(píng)價(jià)設(shè)備運(yùn)行狀態(tài)的檢測方法[1],二是基于改進(jìn)譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)的檢測方法[2]。上述方式費(fèi)時(shí)費(fèi)力,難以實(shí)現(xiàn)實(shí)時(shí)檢測。為解決上述問題,本文提出一種盾構(gòu)機(jī)減速器多級(jí)行星齒輪磨損狀態(tài)檢測方法,可對(duì)行星齒輪磨損狀態(tài)的實(shí)時(shí)檢測,提高盾構(gòu)機(jī)的運(yùn)行安全性和效率。
1? ?減速器多級(jí)行星齒輪磨損狀態(tài)檢測設(shè)計(jì)
1.1? ?減速器多級(jí)行星齒輪振動(dòng)信號(hào)降噪
1.1.1? ?采取降噪措施的必要性
在行星齒輪中,振動(dòng)信號(hào)的采集和處理是至關(guān)重要的,因?yàn)檫@些信號(hào)包含了關(guān)于設(shè)備運(yùn)行狀態(tài)的重要信息。然而,這些信號(hào)常常受到環(huán)境噪聲、設(shè)備內(nèi)部的電磁的干擾,導(dǎo)致信號(hào)中存在大量的噪聲[3]。這些噪聲的存在使得信號(hào)的整體平穩(wěn)性受到影響,進(jìn)一步影響了磨損狀態(tài)檢測的準(zhǔn)確性。
為了解決這一問題,需要采取有效的降噪措施,對(duì)采集到的振動(dòng)信號(hào)進(jìn)行處理。其中,平移不變量小波降噪方法是一種被廣泛應(yīng)用的降噪技術(shù)。
1.1.2? ?平移不變量小波降噪原理
該方法利用小波變換的特性,對(duì)信號(hào)進(jìn)行多尺度分析,從而將噪聲和有用信號(hào)分離。通過這種方式可以有效地去除信號(hào)中的噪聲,提高信號(hào)的平穩(wěn)性,進(jìn)一步提高了磨損狀態(tài)檢測的準(zhǔn)確性。
假設(shè)采樣離散數(shù)據(jù)為XH,獲取與之對(duì)應(yīng)的正交小波變換方法,得到行星齒輪箱振動(dòng)信號(hào)的正交小波變換分解公式:
(1)
式中:dj表示尺度系數(shù);FA表示小波系數(shù);n表示濾波處理次數(shù);k表示常數(shù)。
從信號(hào)濾波的角度來看,正交小波分解是一種有效的信號(hào)處理方法[4]。在正交小波分解過程中,離散信號(hào)通過一系列的高通濾波器和低通濾波器進(jìn)行處理,從而提取出信號(hào)中的高頻信息和低頻信息。
這種處理方式能夠有效地濾除信號(hào)中的噪聲和其他干擾成分,保留信號(hào)中的有用信息,為后續(xù)的信號(hào)分析和處理提供重要基礎(chǔ)。正交小波分解在信號(hào)濾波中扮演著重要的角色,能夠提高信號(hào)的清晰度和可理解性,為各種應(yīng)用領(lǐng)域提供強(qiáng)大的技術(shù)支持。
信號(hào)重構(gòu)過程DFG可以表示為公式(2)的形式:
DFG=x(t)×λ? ? ? ? ? ? ? ? ? (2)
式中:λ表示小波分解的層數(shù)。
1.1.3? ?降噪步驟
將被噪聲污染的信號(hào)恢復(fù)原始信號(hào),對(duì)應(yīng)的減速器多級(jí)行星齒輪振動(dòng)信號(hào)降噪步驟如下所示。
步驟一:將采集到的行星齒輪振動(dòng)信號(hào)作為輸入。
步驟二:采用正交小波變換技術(shù),對(duì)含噪聲的信號(hào)進(jìn)行處理,通過小波分解,將噪聲信號(hào)分解為多個(gè)子信號(hào),每個(gè)子信號(hào)都對(duì)應(yīng)一組小波系數(shù)。這些系數(shù)中包含噪聲成分和重要的信號(hào)特征。
步驟三:對(duì)行星齒輪振動(dòng)信號(hào)實(shí)行多次循環(huán)平移處理。對(duì)應(yīng)的計(jì)算式為:
WG=Av×Sn×σO×DFG? ? ? ? ? ?(3)
式中:WG表示多次循環(huán)平移處理結(jié)果;Av表示平移循環(huán)算子;Sn表示方值差根;σO表示軟閾值。
步驟四:通過平移不變量降噪方法中的軟閾值降噪方法,對(duì)信號(hào)降噪處理。對(duì)應(yīng)的軟閾值函數(shù)可以表示為公式(4)的形式:
(4)
式中:Tμ表示時(shí)間維度特征。
步驟五:再次對(duì)振動(dòng)信號(hào)反方向平移處理,同時(shí)求解處理結(jié)果的平均值。
步驟六:輸出減速器多級(jí)行星齒輪振動(dòng)信號(hào)降噪。
1.2? ?分割齒輪圖像嚙合區(qū)
1.2.1? ?網(wǎng)格區(qū)域分割方法選取
當(dāng)齒輪區(qū)域位于網(wǎng)格區(qū)域的邊緣時(shí),應(yīng)用閾值方法可將導(dǎo)致網(wǎng)格區(qū)域不完全分割。齒輪的區(qū)域位置擁有不一樣的高度,且不同高度的齒輪磨損區(qū)域在圖像中呈現(xiàn)不同的數(shù)值。本文采用一種將區(qū)域分割、區(qū)域聚合和邊緣校正相結(jié)合的網(wǎng)格區(qū)域分割方法。
使用區(qū)域分割方法能夠避免檢測到低灰度網(wǎng)格區(qū)域。大區(qū)域聚合算法識(shí)別候選網(wǎng)格區(qū)域中的網(wǎng)格區(qū)域,可將其作為一個(gè)整體進(jìn)行組合,以得到網(wǎng)格區(qū)域。再根據(jù)原網(wǎng)格區(qū)域的地形特點(diǎn),對(duì)原網(wǎng)格區(qū)域的邊界加以調(diào)整。其克服了因位于原網(wǎng)格區(qū)域邊界上點(diǎn)蝕所引起的不完整劃分問題,從而得到了原網(wǎng)格區(qū)域的最后劃分結(jié)果。
1.2.2? ?自適應(yīng)局部閾值計(jì)算
各個(gè)小齒輪磨損部位的灰度特征都不相同,為此不適宜采用全局切割技術(shù)。經(jīng)過修改后的網(wǎng)格區(qū)的邊界,通常包括一些具有較低灰度值的背景區(qū)域,這部分背景區(qū)域具有相似的點(diǎn)蝕灰度特征。
本文使用自適應(yīng)局部閾值分割來獲得候選區(qū)域,并根據(jù)形狀特征從候選區(qū)域中去除假陽性區(qū)域。自適應(yīng)局部閾值的表達(dá)式如下所示:
Q? =(A1×A2)×SF×σO? ? ? ? ? ?(5)
式中:A1、A2分別表示源域與目標(biāo)域的期望;SF表示張量積在盾構(gòu)機(jī)減速器多級(jí)行星齒輪空間中的特征映射。
1.2.3? ?獲取網(wǎng)格區(qū)域候選項(xiàng)
為了減少網(wǎng)格區(qū)域的分割誤差,基于類網(wǎng)格區(qū)域的劃分結(jié)果,進(jìn)行此部分分段,以獲取網(wǎng)格區(qū)域的候選項(xiàng),確定上下部區(qū)域的分割結(jié)果是否正確。如果區(qū)域分割結(jié)果不正確則需要改進(jìn)。
1.2.4? ?確定類網(wǎng)格劃分區(qū)域分割是否正確
在相似的齒輪類型中,不同的齒面具有相同的高度。不一樣齒輪表面上網(wǎng)格區(qū)域的高度基本上一致。假設(shè)系數(shù)閾值是Thi,則可以使用Hei網(wǎng)格劃分區(qū)域的分割結(jié)果的高度,來確定類網(wǎng)格劃分區(qū)域分割是否正確,具體公式為:
Hei =Thi×O?? ? ? ? ? ? ? ? (6)
當(dāng)公式(6)成立時(shí),即可判斷出區(qū)域分割是不正確的。
1.2.5? ?獲取齒輪圖像嚙合區(qū)
系數(shù)閾值Thi是由齒輪嚙合區(qū)的高度來確定的,考慮到可能會(huì)有一部分齒輪表面圖像當(dāng)中,Thi的取值可能小于嚙合區(qū)寬度。對(duì)此通過公式(7)獲取齒輪圖像嚙合區(qū):
H(ω,t)=Hei×η×γ? ? ? ? ? ? ? ?(7)
式中:η代表信號(hào)的時(shí)頻譜;γ表示調(diào)頻信號(hào)。
根據(jù)上述公式計(jì)算,將源域與目標(biāo)域中振動(dòng)信號(hào)深度特征,映射至盾構(gòu)機(jī)減速器多級(jí)行星齒輪空間中。在新的特征空間中,確定振動(dòng)信號(hào)實(shí)際分類識(shí)別結(jié)果與預(yù)期結(jié)果之間的誤差,并以最小化誤差對(duì)目標(biāo)對(duì)網(wǎng)絡(luò)參數(shù)進(jìn)行微調(diào)。最后通過微調(diào)后的參數(shù),對(duì)輸入盾構(gòu)機(jī)減速器多級(jí)行星齒輪振動(dòng)信號(hào)樣本進(jìn)行分類識(shí)別,從而分割出齒輪圖像嚙合區(qū)結(jié)果。
1.3? ?檢測點(diǎn)蝕區(qū)域
具有不同深度的閾值具有不同的調(diào)用比例值。首先,使用自適應(yīng)局部分支分割來獲得候選分支區(qū)域,然后候選區(qū)域中的偽候選區(qū)域采用形式函數(shù)。
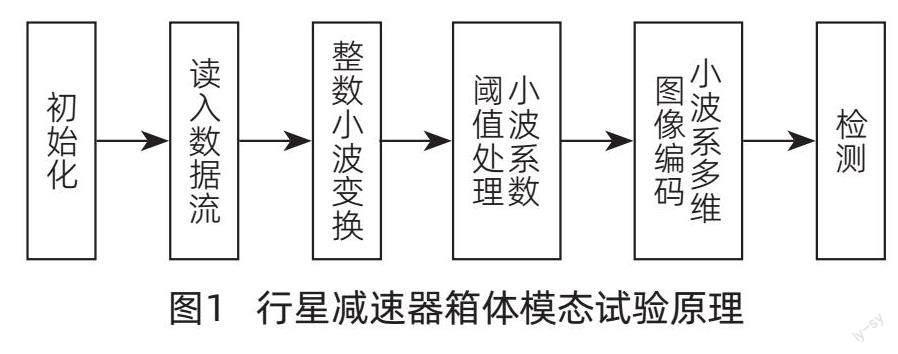
脈沖激勵(lì)是一種過渡激勵(lì)方法,理論上脈沖函數(shù)在無限頻率范圍內(nèi)是連續(xù)和恒定的,能量主要集中在基于頻率的區(qū)間內(nèi)。行星減速器箱體模態(tài)試驗(yàn)原理圖如圖1所示。
由圖1可知,先讀入數(shù)據(jù)流,再對(duì)閾值進(jìn)行處理,最后進(jìn)行檢測。檢測所需要的主要儀器設(shè)備如表1所示。為了確定減速器箱體的主要性質(zhì),試驗(yàn)采用的是自由支撐的邊界要求,進(jìn)而完成檢測[5]。
2? ?對(duì)比試驗(yàn)
2.1? ?實(shí)驗(yàn)說明
將文中盾構(gòu)機(jī)減速器多級(jí)行星齒輪磨損狀態(tài)檢測方法作為實(shí)驗(yàn)組,通過監(jiān)測風(fēng)機(jī)齒輪油指標(biāo)評(píng)價(jià)設(shè)備運(yùn)行狀態(tài)檢測方法,基于改進(jìn)譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)檢測方法,分別作為對(duì)照組A和對(duì)照組B,將3種方法進(jìn)行對(duì)比。
2.2? ?實(shí)驗(yàn)準(zhǔn)備
試驗(yàn)選擇多個(gè)點(diǎn)激振單點(diǎn)拾振脈沖激勵(lì)法來進(jìn)行信號(hào)采集,從而得到數(shù)據(jù)。行星齒輪箱相關(guān)參數(shù)如表2所示。
設(shè)定實(shí)驗(yàn)采集信號(hào)的頻率為11500Hz,采樣的時(shí)間設(shè)為15s,齒輪箱主軸轉(zhuǎn)速為19r/min。
2.3? ?檢測結(jié)果
原始齒輪磨損圖像如圖2所示。文中方法磨損圖像檢測結(jié)果如圖3所示。對(duì)照組A方法檢測結(jié)果如圖4所示。對(duì)照組B方法檢測結(jié)果如圖5所示。
從圖2、圖3、圖4和圖5可以看出,本文方法檢測齒輪磨損的結(jié)果和齒輪原始磨損位置一樣,但是對(duì)照組A方法和對(duì)照組B方法無法檢測出齒輪磨損的所有位置。由此可知,本文方法能夠準(zhǔn)確檢測出齒輪磨損狀態(tài),齒輪磨損狀態(tài)檢測效果良好。
將迭代次數(shù)設(shè)置為500次,并采用對(duì)照組A方法、對(duì)照組B方法和本文方法進(jìn)行對(duì)比,得到不同方法的檢測正確率測試結(jié)果如圖6所示。
通過圖6可以看出,在500次迭代的過程中,本文方法的齒輪磨損狀態(tài)檢測正確率平均能夠達(dá)到90%左右,而對(duì)照組A方法、對(duì)照組B方法的齒輪嚙合磨損狀態(tài)檢測正確率均值平均大概在70%左右,均低于本文方法。由此可知,采用本文方法檢測的齒輪磨損狀態(tài)正確率高于對(duì)照組A方法、對(duì)照組B方法。
3? ?結(jié)束語
齒輪運(yùn)行狀況直接關(guān)系到盾構(gòu)機(jī)減速器工作質(zhì)量,為了保證其正常工作,需針對(duì)盾構(gòu)機(jī)減速器多級(jí)行星齒輪磨損狀態(tài)進(jìn)行定期檢測。本文介紹盾構(gòu)機(jī)減速器中多級(jí)行星齒輪磨損狀況的分析方法,應(yīng)用這種測定方法可以大大提高對(duì)多級(jí)行星齒輪磨損狀況測定的準(zhǔn)確性,遠(yuǎn)超對(duì)照組A方法、對(duì)照組B方法。經(jīng)過比較分析表明,結(jié)果和試驗(yàn)資料存在良好的一致性,兩者的時(shí)間偏差較小。振型設(shè)計(jì)相似,共同證明了基礎(chǔ)研究和試驗(yàn)技術(shù)的有效性。
參考文獻(xiàn)
[1] 賈敏.通過監(jiān)測風(fēng)機(jī)齒輪油指標(biāo)評(píng)價(jià)設(shè)備運(yùn)行狀態(tài)[J].化工
時(shí)刊,2021,35(3):25-27+46.
[2] 蔡聰藝.基于改進(jìn)譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)檢測
方法[J].沈陽工程學(xué)院學(xué)報(bào)(自然科學(xué)版),2022,18(1):86-90.
[3] 高云端,田野,朱永波,等.基于稀疏注意力機(jī)制的齒輪早期
磨損故障診斷研究[J].機(jī)械傳動(dòng),2023,47(3):105-112.
[4] 畢浩程,蔣章雷,吳國新,等.基于SSA-VMD和2.5維譜的
齒輪箱磨損故障診斷[J].機(jī)床與液壓,2023,51(6):181-187.
[5] 張建偉,桂敏,王洪全,等.某型發(fā)動(dòng)機(jī)上垂直錐齒輪軸承異
常磨損故障分析[J].航空維修與工程,2023,382(4):45-47.