基于圖像處理的裂縫量化分析
2024-04-26 15:48:08許守春許向陽馮宇恒
化工自動(dòng)化及儀表 2024年2期
許守春 許向陽 馮宇恒

作者簡(jiǎn)介:許守春(1997-),碩士研究生,從事目標(biāo)檢測(cè)、語義分割等圖像處理方面的研究。
通訊作者:許向陽(1970-),高級(jí)工程師,從事工業(yè)自動(dòng)化、目標(biāo)檢測(cè)及分割方面的研究,xxy1970@126.com。
引用本文:許守春,許向陽,馮宇恒.基于圖像處理的裂縫量化分析[J].化工自動(dòng)化及儀表,2024,51(2):173-180;337.
DOI:10.20030/j.cnki.1000-3932.202402005
摘 要 對(duì)裂紋量化技術(shù)進(jìn)行了研究,從而獲取對(duì)應(yīng)裂縫的長(zhǎng)度、寬度信息。針對(duì)長(zhǎng)度特征的量化,分析現(xiàn)有細(xì)化算法提取裂縫骨架的不足,提出新的刪除模板與保留模板,通過模板匹配的方式消除裂紋骨架中的冗余像素,并設(shè)置合理的長(zhǎng)度閾值消除骨架中的冗余骨刺結(jié)構(gòu),優(yōu)化骨架的提取,進(jìn)而獲取精確的裂縫長(zhǎng)度信息。針對(duì)裂縫寬度特征的量化,根據(jù)裂紋走向,優(yōu)化最近距離法,減少計(jì)算裂縫寬度的迭代次數(shù),提高量化效率。同時(shí),為了獲取更精確的裂縫寬度信息,結(jié)合裂縫特征和提取的骨架,采用骨架法向法獲取像素級(jí)精度的裂縫寬度信息。
關(guān)鍵詞 裂縫量化 骨架提取 最近距離法 骨架法向法 安全評(píng)估
中圖分類號(hào) TP391.41?? 文獻(xiàn)標(biāo)志碼 A?? 文章編號(hào) 1000-3932(2024)02-0173-09
混凝土是各類工程建筑中使用最廣泛的材料之一,但是在各種內(nèi)外因素的影響下,建筑物表面會(huì)不可避免地出現(xiàn)裂縫[1,2]。裂縫是混凝土建筑物中最常見的結(jié)構(gòu)缺陷,量化分析可以為裂縫的風(fēng)險(xiǎn)等級(jí)評(píng)估提供重要依據(jù),為混凝土建筑的安全狀況提供精確的數(shù)字化分析和參考[3],以便工作人員能夠及時(shí)發(fā)現(xiàn)混凝土建筑物中存在的隱患,從而對(duì)裂縫進(jìn)行及時(shí)檢修和維護(hù),保障建筑物的整體安全。
裂縫量化是對(duì)裂縫面積、長(zhǎng)度、寬度等特征的獲取。傳統(tǒng)的裂縫特征量化主要通過人工使用檢測(cè)工具或測(cè)量?jī)x器完成,存在操作難度大、風(fēng)險(xiǎn)高、成本高、效率低下、對(duì)人員技術(shù)要求高等問題。隨著圖像處理技術(shù)的發(fā)展,目前的裂縫量化大多采用基于圖像處理的方式,可以利用深度學(xué)習(xí)技術(shù)對(duì)圖像中的裂縫區(qū)域進(jìn)行檢測(cè),然后通過像素計(jì)算的方式獲取裂縫的實(shí)際量化結(jié)果。
裂縫長(zhǎng)度的計(jì)算大多基于裂縫的細(xì)化骨架,通過統(tǒng)計(jì)裂縫骨架的像素個(gè)數(shù)即可得到對(duì)應(yīng)的裂縫長(zhǎng)度信息。最簡(jiǎn)單的裂縫骨架獲取方式就是取裂縫兩邊緣的中線作為骨架線,但是這種方式在裂縫交點(diǎn)處時(shí)獲取兩邊界中點(diǎn)比較復(fù)雜,容易出現(xiàn)骨架線斷裂、骨刺較多的情況。近年來的報(bào)道中,骨架的提取一般由細(xì)化操作得到,利用Pavlidis細(xì)化算法[4]、Hilditch細(xì)化算法[5]、基于索引表的細(xì)化算法[6]及Zhang-Suen細(xì)化算法[7~9]等刪除裂縫圖像的邊緣像素,從而提取對(duì)應(yīng)骨架。但是利用這些算法直接提取裂縫骨架時(shí),總會(huì)出現(xiàn)裂縫的拓?fù)浣Y(jié)構(gòu)改變、骨架斷裂、冗余像素及骨刺結(jié)構(gòu)過多等情況。裂縫寬度方向一般與裂縫兩邊界相切,針對(duì)裂縫寬度的測(cè)量主要有最大內(nèi)切圓法、最小外接矩形法[10]及最近距離法[11]等。其中,最大內(nèi)切圓法通過計(jì)算裂縫最大內(nèi)切圓的直徑來得到裂縫的最大寬度,但由于裂縫形態(tài)不規(guī)則,這種方式得到的寬度值會(huì)比實(shí)際偏小。最小外接矩形法通過求取裂縫最小外接矩形的寬度來獲取裂縫寬度,為了提高精確度可以將裂縫分為多個(gè)小段,并取各段結(jié)果的最大值作為裂縫寬度,但是該方式得到的寬度值通常會(huì)比實(shí)際偏大。最近距離法[12]一般選取裂縫左邊界上的點(diǎn),然后遍歷圖像中右邊界上的點(diǎn),通過計(jì)算兩點(diǎn)之間的距離,找到右邊界上與左邊界當(dāng)前點(diǎn)距離最近的點(diǎn),將兩點(diǎn)之間的連線作為該點(diǎn)處的寬度方向,兩點(diǎn)間的距離即為寬度值。
綜上所述,在利用細(xì)化算法提取裂縫骨架時(shí),還需要結(jié)合特定算法并對(duì)其進(jìn)行優(yōu)化,從而在保持裂縫原有拓?fù)滏溄咏Y(jié)構(gòu)的前提下,獲取單像素寬度的骨架,進(jìn)而求取精確的裂縫長(zhǎng)度。在計(jì)算裂縫寬度信息時(shí),上述方法并不能很好地表達(dá)裂縫各點(diǎn)處的寬度方向,得到的裂縫寬度值也不精確,因此需要尋找高效的方法進(jìn)行優(yōu)化改進(jìn)。
1 裂縫檢測(cè)
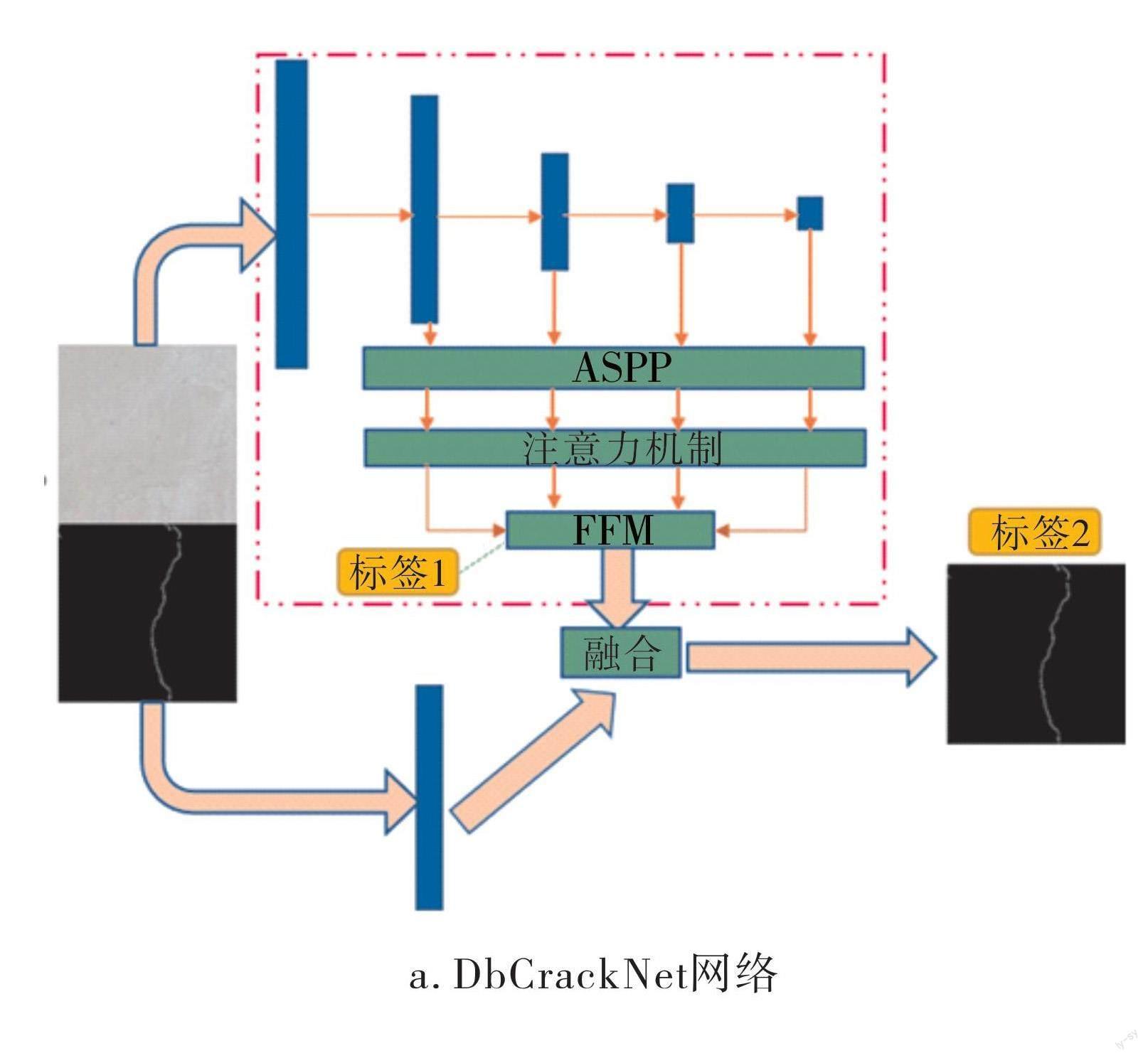
在前期的研究工作中,筆者提出了圖1a所示的用于檢測(cè)裂縫位置及形態(tài)的雙分支分割網(wǎng)絡(luò)DbCrackNet[13]。該網(wǎng)絡(luò)中引入了空間金字塔池化ASPP融合不同感受野的信息,并利用注意力機(jī)制對(duì)通道和空間特征進(jìn)行優(yōu)化,最后將兩分支的結(jié)果進(jìn)行融合得到圖1b所示的分割結(jié)果。
圖1 DbCrackNet網(wǎng)絡(luò)結(jié)構(gòu)及對(duì)應(yīng)的
裂縫分割結(jié)果
2 裂縫量化
利用分割網(wǎng)絡(luò)檢測(cè)出裂縫的位置及形態(tài)(圖1b)后,即可進(jìn)行裂縫量化,獲得裂縫的面積、長(zhǎng)度和寬度信息。裂縫量化示意圖如圖2所示。
2.1 裂縫面積
通過統(tǒng)計(jì)圖1b裂縫分割結(jié)果中的像素個(gè)數(shù)即可得到對(duì)應(yīng)裂縫的面積S。
2.2 裂縫長(zhǎng)度
Zhang-Suen細(xì)化算法在進(jìn)行骨架提取時(shí),能夠保持裂縫拐點(diǎn)、各分支交點(diǎn)處的細(xì)節(jié)連接結(jié)構(gòu),并且其計(jì)算效率較高,但是該方法提取的裂縫骨架中存在冗余像素和多余的骨刺結(jié)構(gòu)。為此,筆者針對(duì)其不足之處進(jìn)行優(yōu)化,獲取單像素寬度的骨架,通過統(tǒng)計(jì)骨架的像素?cái)?shù)即可得到對(duì)應(yīng)裂縫的長(zhǎng)度。
2.2.1 Zhang-Suen細(xì)化算法
Zhang-Suen細(xì)化算法是一個(gè)經(jīng)典的迭代式細(xì)化算法,其基本原理示意圖如圖3所示。在進(jìn)行細(xì)化操作時(shí),需要查看二值圖像中當(dāng)前前景像素點(diǎn)(P0)的8鄰域(P1~P8)狀態(tài),并通過模板匹配的方式標(biāo)記需要?jiǎng)h除的像素點(diǎn),當(dāng)遍歷完圖像中所有前景像素時(shí),統(tǒng)一刪除標(biāo)記的像素,從而獲取對(duì)應(yīng)的骨架結(jié)構(gòu)。
圖3 P0的8鄰域
假設(shè)二值圖像中前景即裂縫灰度值為1,背景為0。Zhang-Suen細(xì)化算法在提取骨架時(shí)反復(fù)迭代下述兩個(gè)子過程,直到?jīng)]有需要被刪除的像素。
子過程一。對(duì)檢測(cè)結(jié)果中的前景像素進(jìn)行遍歷,如果像素點(diǎn)P0同時(shí)滿足以下4個(gè)條件:
2≤N(P0)≤6
S(P0)=1
P2×P4×P6=0
P4×P6×P8=0
則將其標(biāo)記,并在遍歷結(jié)束后將其灰度變?yōu)?,即將當(dāng)前點(diǎn)從骨架結(jié)構(gòu)中刪除。
子過程二。對(duì)檢測(cè)結(jié)果中的前景像素進(jìn)行遍歷,如果像素點(diǎn)P0同時(shí)滿足以下4個(gè)條件:
2≤N(P0)≤6
S(P0)=1
P2×P6×P8=0
P2×P4×P8=0
則將其標(biāo)記,遍歷結(jié)束后將其灰度值變?yōu)?。
其中,前景像素點(diǎn)P0=1,N(P0)為8鄰域中前景像素的個(gè)數(shù),S(P0)為P1-P8-P1這一圈中灰度值從0變?yōu)?的次數(shù)。
當(dāng)像素點(diǎn)滿足兩個(gè)子過程的條件時(shí),P0只可能為需要被清除的邊緣像素點(diǎn)。
利用Zhang-Suen細(xì)化算法提取圖1b中最左側(cè)裂縫的骨架,結(jié)果如圖4所示。可以看出,骨架中存在較多的骨刺結(jié)構(gòu),并且在局部放大圖中可以清晰地看到其斜向區(qū)域存在很多的冗余像素,沒有嚴(yán)格滿足單像素寬度的條件。
圖4 Zhang-Suen細(xì)化算法提取的裂縫
骨架及局部放大圖
2.2.2 冗余像素的清除
由Zhang-Suen細(xì)化算法兩個(gè)子過程的條件可知,其只考慮了S(P0)=1的情況,并沒有考慮
S(P0)>1的情況,這會(huì)導(dǎo)致骨架斜向區(qū)域中留有冗余像素,為此提出了圖5所示的8鄰域模板,用于刪除斜向的冗余像素。
遍歷裂縫骨架上的像素點(diǎn),當(dāng)其8鄰域與圖5中的模板相同時(shí),將其標(biāo)記,并在遍歷結(jié)束后將被標(biāo)記的所有像素點(diǎn)刪除,經(jīng)過刪除模板處理后的骨架如圖6所示。
圖6 刪除模板處理后的骨架及局部放大圖
圖6中,經(jīng)過刪除模板處理后的裂縫骨架中斜向區(qū)域的冗余像素已經(jīng)清除,但是出現(xiàn)了骨架斷裂的情況,說明刪除模板存在誤刪骨架像素的問題。經(jīng)過分析,提出圖7所示的保留模板,其中P0、P0′都是骨架像素,且其8鄰域都與刪除模板相符,所以在刪除模板遍歷時(shí)都被清除,從而造成骨架斷裂。為此設(shè)置保留模板,使得遍歷時(shí)與刪除模板匹配的P0保留,P0′被清除,從而正確消除骨架中的冗余像素。
2.2.3 骨刺的清除
經(jīng)過刪除模板和保留模板處理后的裂縫骨架為單像素寬度,單像素寬度的特性一方面有助于得到更精確的裂縫長(zhǎng)度,另一方面有助于識(shí)別裂縫中的分支結(jié)構(gòu)。在利用模板優(yōu)化后的骨架中,N(P0)=1的為骨架端點(diǎn),N(P0)=2的為骨架中間的點(diǎn),N(P0)≥3的為骨架中的分支交點(diǎn)。
為了消除骨架中存在的多余骨刺結(jié)構(gòu),設(shè)置分支長(zhǎng)度閾值為l,計(jì)算各分支長(zhǎng)度lengthi,若lengthi<l,則將該分支中點(diǎn)的灰度置為0,即將對(duì)應(yīng)骨刺結(jié)構(gòu)從骨架結(jié)構(gòu)中刪除。骨刺刪除具體流程如下:
a. 根據(jù)N(P0)=1獲取骨架中的分支端點(diǎn),根據(jù)N(P0)≥3獲取骨架中的分支交點(diǎn);
b. 取出一個(gè)端點(diǎn)P,尋找其8鄰域內(nèi)灰度為1的點(diǎn)P′,并以從P到P′的方向?yàn)楣羌艿纳L(zhǎng)方向,此時(shí)P′為骨架中間的點(diǎn);
c. 觀察中間點(diǎn)P′點(diǎn)的8鄰域情況,找到灰度值為1的兩個(gè)點(diǎn),其中一個(gè)點(diǎn)為端點(diǎn)P,然后以P′到另一個(gè)點(diǎn)的方向作為骨架生長(zhǎng)方向;
d. 根據(jù)步驟c沿著骨架生長(zhǎng)方向不斷遍歷,直到遇到分支交點(diǎn)為止,此時(shí)即可得到當(dāng)前分支的長(zhǎng)度length;
e. 若length≥l,則當(dāng)前分支為裂縫真實(shí)分支,將其保留,若length<l,則該分支為骨刺結(jié)構(gòu),執(zhí)行刪除操作;
f. 重復(fù)執(zhí)行步驟b~e,直到骨架結(jié)構(gòu)中的分支均判斷完畢。
完成上述過程,就可以清除單像素寬度的裂縫骨架中多余的骨刺結(jié)構(gòu),得到精準(zhǔn)的裂縫骨架(圖8),然后統(tǒng)計(jì)當(dāng)前骨架中的像素點(diǎn)個(gè)數(shù),即可得到裂縫的長(zhǎng)度Length。
圖8 優(yōu)化后的單像素寬度骨架及局部放大圖
2.3 裂縫寬度
裂縫寬度特征包括最大寬度Width和平均寬度Width,其中Width可以根據(jù)裂縫面積S和骨架長(zhǎng)度Length的比值直接得到。裂縫寬度方向應(yīng)盡量與裂縫的兩邊界相切,從而較好地表達(dá)裂縫的寬度信息。
2.3.1 最近距離法
在裂縫的左邊界上取點(diǎn)(x,y),找到右邊界上與之最近的點(diǎn)(x,y),并以兩點(diǎn)間的連線作為當(dāng)前位置的寬度方向,利用最近距離法求取裂縫寬度:
Width=(1)
在判斷左右邊界點(diǎn)時(shí)有兩種方法:
a. 提取裂縫分割結(jié)果中的所有輪廓點(diǎn)(x,y),判斷點(diǎn)(x,y+1)的情況,若其值為1,則當(dāng)前點(diǎn)(x,y)為裂縫的左邊界點(diǎn),反之則為右邊界點(diǎn);
b. 取骨架上的點(diǎn)(x,y),向左遍歷裂縫區(qū)域,如果某一點(diǎn)左側(cè)像素點(diǎn)的值為0,則得到左邊界點(diǎn),同理,可以得到右邊界點(diǎn)。
2.3.2 最近距離法的優(yōu)化
最近距離法中,左邊界上的點(diǎn)需要與右邊界上所有點(diǎn)計(jì)算距離后才能找到對(duì)應(yīng)的寬度方向,但是右邊界上的點(diǎn)與左邊界當(dāng)前點(diǎn)在寬度方向上的距離不會(huì)太遠(yuǎn),計(jì)算距離時(shí)遍歷所有在右邊界上的點(diǎn)不僅耗時(shí)長(zhǎng)而且大部分為無效計(jì)算。為此,以裂縫骨架的走向設(shè)置距離迭代閾值N,即對(duì)左邊界上的每個(gè)點(diǎn)只需要計(jì)算N次即可找到右邊界上與之最近的點(diǎn),其示意圖如圖9所示。裂縫在小范圍內(nèi)只會(huì)呈現(xiàn)4種狀態(tài),分別為裂縫向左收縮、向左擴(kuò)張、向右收縮、向右擴(kuò)張。
圖9中,黑色實(shí)線為裂縫邊界,藍(lán)色虛線為裂縫骨架線。通過最小二乘法擬合可以得到當(dāng)前位置處的骨架斜率k,圖9a、b中的k>0,圖9c、d中的k<0。在圖9中做左邊界上的點(diǎn)O到右邊界的橫向連線(綠色虛線)和垂線(紅色虛線),其中橫向連線交點(diǎn)為Q,垂線交點(diǎn)為P,根據(jù)最小距離法的原理,此時(shí)垂線即表示當(dāng)前的寬度方向。
當(dāng)k<0時(shí),從右邊界沿Q到P(從下到上)迭代計(jì)算N次,當(dāng)k>0時(shí),從右邊界沿Q到P(從上到下)迭代計(jì)算N次,如此即可減少計(jì)算最近距離時(shí)的迭代次數(shù),達(dá)到優(yōu)化最近距離法的目的。
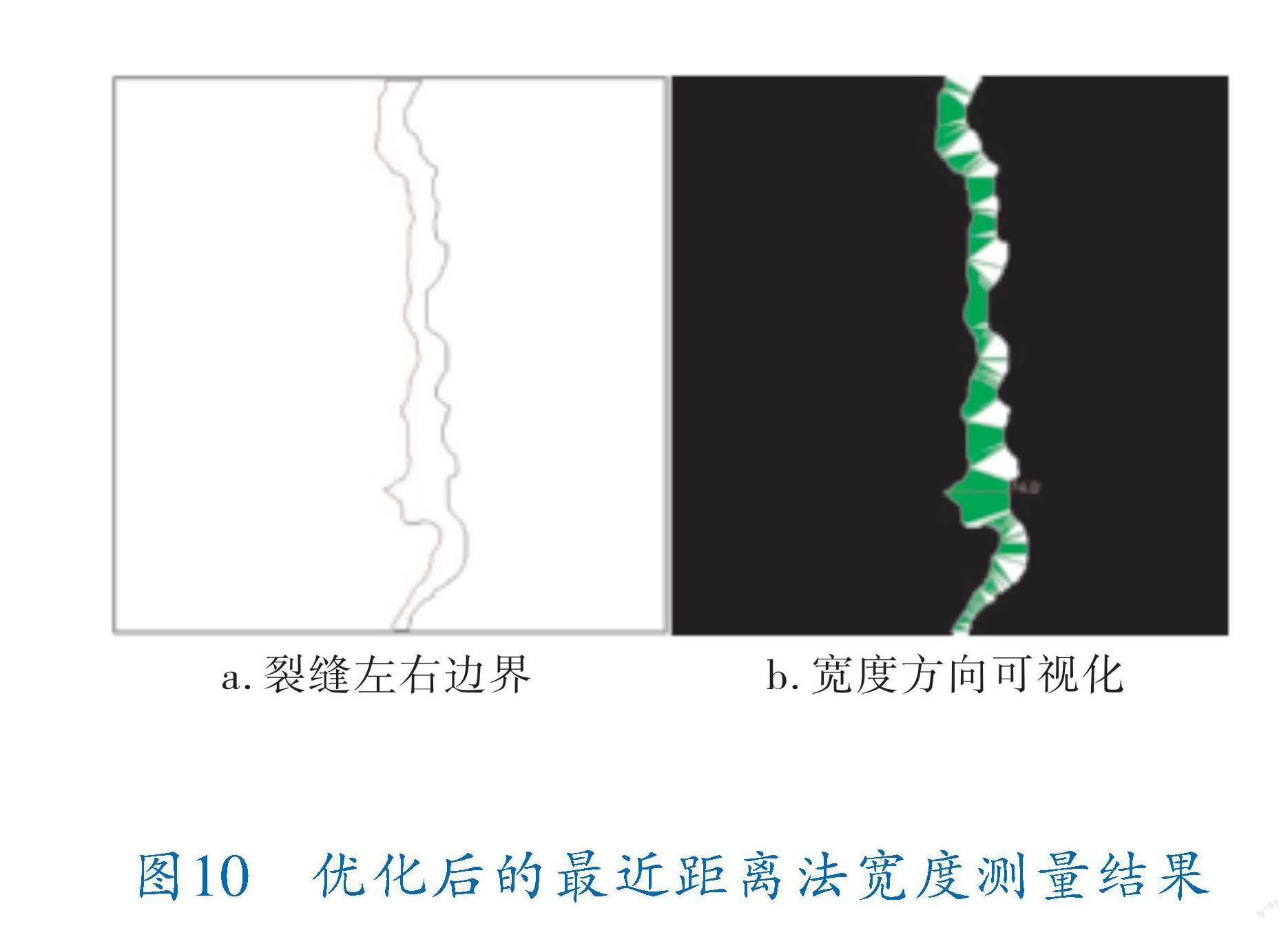
利用優(yōu)化后的最近距離法求取圖1b左側(cè)裂縫寬度的可視化結(jié)果如圖10所示。
2.3.3 骨架法向法
由圖10可知,使用最近距離法可以計(jì)算裂縫的寬度,但是最小距離的方向不一定與寬度方向
圖10 優(yōu)化后的最近距離法寬度測(cè)量結(jié)果
一致,而裂縫寬度方向一般與骨架線相切,所以采用骨架法向法求取對(duì)應(yīng)的裂縫寬度。如圖11所示,取骨架相鄰的5個(gè)像素(x,y)(i=1,2,…,5)作為一段短裂縫,并利用最小二乘法求取骨架線方程中的參數(shù)a、b。
圖11 骨架法向法示意圖
最小二乘法通過最小化真實(shí)值y與擬合值a+bx的平方和來估計(jì)參數(shù)a、b的最佳值,即:
min[y-(a+bx)](2)
要使式(2)的值最小,則參數(shù)a、b的偏導(dǎo)數(shù)應(yīng)為0,經(jīng)過整理可得:
aN+b∑x=∑y(3)
a∑y+b∑x=∑xy
通過解方程組(3)即可得到直線參數(shù)a、b的最佳估計(jì)值:
=
=
則經(jīng)過(x,y)的骨架法向表達(dá)式為:
y′=a′+b′x′(5)
b′=-
a′=y+x
通過最小二乘法得到裂縫骨架法線的表達(dá)式后,采用迭代式搜尋法獲得裂縫骨架法線與裂縫邊界的交點(diǎn),如圖12所示,圖中黑色區(qū)域?yàn)榱芽p前景,紅色實(shí)線為裂縫骨架,綠色實(shí)線為O點(diǎn)處的骨架法線,P、Q為法線與裂縫邊界交點(diǎn)。計(jì)算O點(diǎn)處的寬度時(shí),從O點(diǎn)出發(fā),分別沿當(dāng)前位置處的法向正向和反向迭代,并判斷當(dāng)前點(diǎn)是否為裂縫區(qū)域,從而找到O點(diǎn)處寬度方向上的兩個(gè)端點(diǎn)P點(diǎn)(x,y)和Q點(diǎn)(x,y),最后求取兩點(diǎn)間的歐氏距離即可得到O點(diǎn)處的寬度WidthO。
圖12 骨架法向法求取裂縫寬度示意圖
按照上述方法求取骨架上每個(gè)點(diǎn)處的裂縫寬度,對(duì)應(yīng)的可視化結(jié)果如圖13所示,圖中綠色線即為寬度方向,紅色線為最大寬度所在位置,從圖13中可以看出,骨架法向法可以更好地獲取裂縫的寬度方向。
圖13 骨架法向法求取裂縫寬度的可視化結(jié)果
2.4 裂縫量化結(jié)果
對(duì)分割結(jié)果(圖1b)進(jìn)行量化分析,結(jié)果見表1。其中Size為圖片尺寸,Lzs為Zhang-Suen細(xì)化算法得到的初始骨架長(zhǎng)度,Ltemplate為利用模板消除冗余像素后的骨架長(zhǎng)度,Length為繼續(xù)消除骨刺后的長(zhǎng)度,S為裂縫面積,Widthmax為裂縫最大寬度,Widthmean為裂縫平均寬度。由表1可以看出,在進(jìn)行裂縫量化時(shí),采用模板匹配和骨刺消除的方法可以對(duì)Zhang-Suen細(xì)化算法進(jìn)行合理優(yōu)化,有效清除不屬于骨架的像素和結(jié)構(gòu),從而得到精確的裂縫長(zhǎng)度信息,精確的骨架也為基于骨架法向法的寬度測(cè)量提供了基礎(chǔ),提高了寬度測(cè)量的合理性和精確度。
為了進(jìn)一步驗(yàn)證求取裂縫寬度特征結(jié)果的合理性,在圖1b左側(cè)裂縫的骨架上取9個(gè)點(diǎn),用骨架法向法求取其寬度值,然后取這9個(gè)寬度方向與裂縫左邊界的9個(gè)交點(diǎn)再用最近距離法與人工測(cè)量法在裂縫右邊界上分別尋找與之相匹配的點(diǎn),從而獲得對(duì)應(yīng)的寬度方向和寬度值,3種方式所得寬度值、寬度角(寬度方向與水平方向的夾角)列于表2、3,利用表2、3的數(shù)據(jù),可以得到最近距離法與骨架法向法在9個(gè)采樣點(diǎn)處的平均寬度值誤差分別為2.17像素、2.86像素,平均寬度角誤差分別為4.73、11.83°,說明與最近距離法相比,骨架法向法能夠更好地求取裂縫的寬度信息。
采用不同方法獲取9個(gè)采樣點(diǎn)的寬度測(cè)量結(jié)果可視化對(duì)比如圖14所示,其中,紅色線為骨架法向法測(cè)量結(jié)果,白色線為最近距離法結(jié)果,藍(lán)色線為人工測(cè)量結(jié)果。由圖14可以看出,利用骨架法向法求取的裂縫寬度方向與人工測(cè)量結(jié)果一致程度更高,說明利用骨架法向法求取裂縫寬度更加合理性,其能夠有效確定對(duì)應(yīng)裂縫的寬度方向和寬度值。
3 結(jié)束語
對(duì)裂縫的量化分析方案進(jìn)行了研究,并基于神經(jīng)網(wǎng)絡(luò)的裂縫分割結(jié)果獲取裂縫的量化信息。針對(duì)現(xiàn)有細(xì)化算法提取裂縫骨架的不足,筆者提出了新的8鄰域保留模板和刪除模板,通過模板匹配的方式刪除骨架中的冗余像素,并通過長(zhǎng)度閾值篩選清除骨架中的多余骨刺,從而優(yōu)化Zhang-Suen細(xì)化算法,獲得嚴(yán)格單像素寬度的裂縫骨架及精確的裂縫長(zhǎng)度信息。對(duì)于裂縫寬度特征的量化,筆者設(shè)計(jì)了最近距離法和骨架法向法求取的方案。結(jié)合裂縫的走向,對(duì)最近距離法進(jìn)行了優(yōu)化,減少了寬度的計(jì)算次數(shù),提高了寬度計(jì)算的效率。同時(shí),為了更好地表達(dá)裂縫方向,利用最小二乘法求取裂縫骨架及其法向的表達(dá)式,然后使用迭代式搜尋法確定法線與裂縫邊界的交點(diǎn),從而獲得對(duì)應(yīng)的寬度信息。
筆者提出的量化方案可以有效獲取對(duì)應(yīng)裂縫的長(zhǎng)度、寬度等特征,可以為裂縫的嚴(yán)重程度及發(fā)展?fàn)顩r提供數(shù)字化參考,輔助建筑物損害程度的評(píng)估。
參 考 文 獻(xiàn)
[1] 寧志軍.建筑工程施工中混凝土裂縫的成因與治理方法[J].陶瓷,2023(12):198-200.
[2] 張艷霞.建筑工程施工中混凝土裂縫的成因與應(yīng)對(duì)措施[J].城市建設(shè)理論研究(電子版),2023(33):112-114.
[3] 呂志金,陳雪芳.基于深度學(xué)習(xí)的橋梁裂縫檢測(cè)與量化分析[J].信息技術(shù)與信息化,2021(10):75-77.
[4] PAVLIDIS T.Algorithms for Graphics and Image Processing[J].ZAMM-Journal of Applied Mathematics and Mechanics,2010,63(8):395.
[5] NASERI M,HEIDARI S,GHEIBI R,et al.A novel quantum binary images thinning algorithm:A quantum version of the Hilditch′s algorithm[J].Optik,2017,
131:678-686.
[6] 白瑩.手寫漢字的細(xì)化算法研究[D].西安:西安電子科技大學(xué),2014.
[7] DONG J W,CHEN Y M,YANG Z J,et al.A parallel thinning algorithm based on stroke continuity detection[J].Signal,Image and Video Processing,2017,11(5):873-879.
[8] 張翠芳,楊國(guó)為,岳明明.Zhang并行細(xì)化算法的改進(jìn)[J].信息技術(shù)與信息化,2016(6):69-71.
[9] 陳樹,楊天.一種基于改進(jìn)ZS細(xì)化算法的指針儀表檢測(cè)[J].計(jì)算機(jī)工程,2017,43(12):216-221.
[10] 董大衛(wèi).基于最小外接矩形的汽車表面縫隙尺寸檢測(cè)方法研究[D].上海:上海工程技術(shù)大學(xué),2021.
[11] 房銘坤,付國(guó).基于數(shù)字圖像處理的混凝土裂縫寬度檢測(cè)方法研究[J].建筑結(jié)構(gòu),2019,49(S2):630-634.
[12] 沈藝.基于機(jī)器視覺的建筑物裂縫檢測(cè)研究及應(yīng)用[D].蘇州:蘇州科技大學(xué),2020.
[13] XU S C,XU X Y,WEI H R,et al.DbCrackNet:Dual-branch network for crack segmentation[C]//2022 China Automation Congress (CAC).2022:690-695.
(收稿日期:2023-04-15,修回日期:2024-01-30)
Quantitative Analysis of Cracks Based on Image Processing
XU Shouchun, XU Xiangyang, FENG Yuheng
(School of Automation, Beijing Institute of Technology)
Abstract? ?In this paper, the quantification technique of cracks was studied to obtain the information on both length and width of corresponding cracks. Aiming at the quantification of length features, the shortcomings of the existing refinement algorithm to extract the crack skeleton were analyzed and a new deletion template and a retention template were proposed, including making use of template matching to eliminate the redundant pixels in the crack skeleton, and setting a reasonable length threshold to eliminate the redundant bone spur structure in the skeleton so as to optimize the extraction of the skeleton and obtain accurate crack length information. Aiming at the quantification of crack width characteristics, having the crack trend and optimal nearest distance method based to reduce the number of iterations for calculating the crack width and improve the quantification efficiency. In addition, for purpose of obtaining more accurate information on the crack width, having crack characteristics and extracted skeleton considered and the skeleton normal method used to obtain pixellevel accuracy information on the crack width were implemented.
Key words? ?crack quantification, skeleton extraction, nearest distance method, skeleton normal method, safety assessment