基于艦載雷達的海雜波特性分析與仿真
2024-04-26 08:15:46王雨辰
環境技術 2024年3期
王雨辰
(西安導航技術研究所,西安 710068)
引言
利用雷達探測目標時,由于受到環境、設備等各種方式的干擾,往往會接收到一些干擾雷達正常工作的雷達回波信號,該種信號被稱作雜波。根據進入路徑的不同,可分為主瓣回波和旁瓣回波。而根據產生雜波載體的不同,可分為面雜波和體雜波。面雜波通常包括一定面積內的自然環境,包括植被、樹木、人造建筑及海表面等散射的回波,又稱為區域雜波,主要包含地雜波和海雜波。體雜波通常包括更大面積或具有一定活動屬性的雜波,主要包括較大尺寸的云雨、箔條、鳥及昆蟲等的散熱回波[1]。
對于探測不同目標的雷達而言,會有不同的雜波對雷達進行干擾。而對于探測海面目標的雷達來說,由于鏡面反射和漫反射,常常會產生后向散射效應,影響到雷達的探測識別能力,這種干擾信號就是海雜波。海雜波會受到多種環境因素的干擾,包括海浪大小,風速大小,溫濕度等,相對地雜波更為復雜。因此,為了探測海面目標的雷達具備更好的性能,下文將對雷達將接收到的海雜波進行分析說明。
1 海雜波的后向散射特性
雷達回波是指雷達在工作過程中,通過空間散射體接收到的散射回波。需要對雷達回波的強度進行描述,從而確定雷達回波的特性。此處使用雷達截面積(RCS)對回波強度進行描述。根據雷達原理,雷達截面積往往與多個因素相關,包括雷達發射參數,如極化方式、電磁波的頻率、入射角等,也與探測目標的特性相關,包括探測目標的外形、體積、組成結構和使用材料等,因此,通過雷達截面積的描述,能夠對目標的特性(如大小、形狀和指向)[3]進行較為準確的描述。
雜波產生的原理與雷達回波類似,只因探測的不是目標而是干擾因素而產生,因此,通過雜波散射截面積能夠較好地對雜波功率進行分析。此處的等效散射截面積為雜波區(面積為Ac)反射產生。雜波的平均RCS 由式(1)給出:
式中:
σ0—單位面積的雷達反射率;
Ac—被照射的地面或海面區域面積,m2;
σ—被照射的區域的雷達散射截面積,m2[4]。
σ0是一個無量綱的系數,單位為分貝:σ0=10log10(σ/A)。
1.1 雜波散射系數
以上定義了雷達雜波單位面積的雷達反射率為,該參數也被稱為雜波散射系數。通過雜波散射系數,可以對雜波特性進行描述,從而通過衡量散射體反射電磁波的能力評估雷達性能。對雜波散射系數及散射體的雷達截面積進行空間范圍(面積或體積)的歸一化或平均[5]可得到雜波后向散射系數。
使用雜波散射系數時,對散射體的均勻程度有要求。“均勻”的描述一個相對概念,散射體的均勻程度與多個因素相關,包括散射體本身的結構特性,用于探測該散射體雷達的分辨率特性等。當散射體自身越均勻,用于探測目標的雷達其分辨率越低,使用式(1)計算出來的后向散射系數就越精準[6]。
而海雜波恰好符合散射體均勻這個特性。海雜波往往是一個較大的平面,遮蔽效應較弱,可使用雜波散射系數進行較準確的計算。通過以上討論,我們了解到由于雜波散射系數可由雜波散射截面積計算得來,因此海雜波散射系數也同樣受到多個因素的影響,包括雷達發射參數,如極化方式、電磁波的頻率、入射角等,同時還受到雷達分辨率的影響。此外,也與探測的雜波其特性相關,包括探測目標的外形、體積、組成結構和使用材料等,在此處就可以解讀為可由海浪、風速、海浪相對于雷達波束的方向、持續時間所決定,同時還要受到浪峰的出現、退潮、漲潮以及影響表面張力的污染的影響[7]。
基于當前豐富的海雜波實測數據,不同學者使用不同思路提出了提出了多個海雜波雜波散射系數的經驗模型。如Nathanson 統計了近60 組實測海雜波的雜波散射系數的數據,當時他使用較簡單的數學模型GIT 模型進行了擬合,該模型與實際情況差別較大。
根據以上現有的60 組實測的海雜波數據,Gregers提出了改進的海雜波模型[8]。這個模型將雷達的多個參數考慮進行,建立了海雜波雜波散射系數σH,V與雷達工作頻率f、極化方式、海態SS 和掠射角之間的關系,其具體表達式如下:
式中:
c1、c2、c3、c4、c5— 一種固定參數,根據天線極化的方式不同,具有不同的取值,水平極化和垂直極化條件下這五個參數的取值如表1 所示。
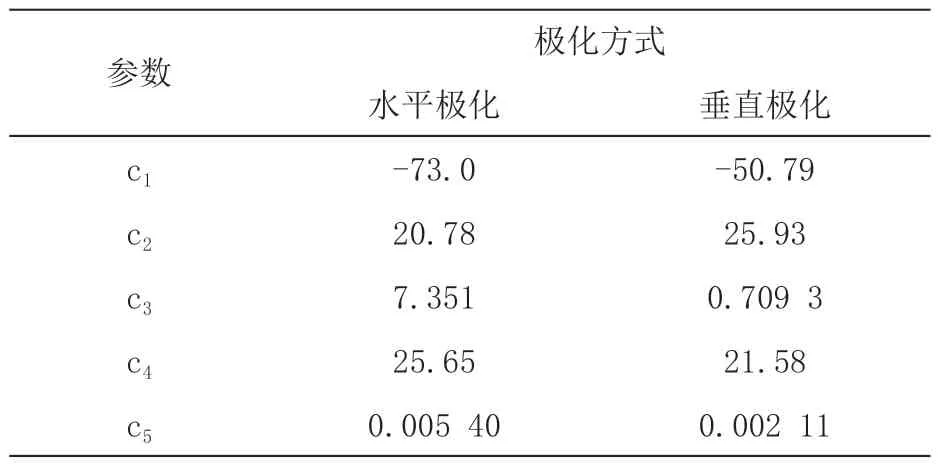
表1 海雜波經驗模型中的參數
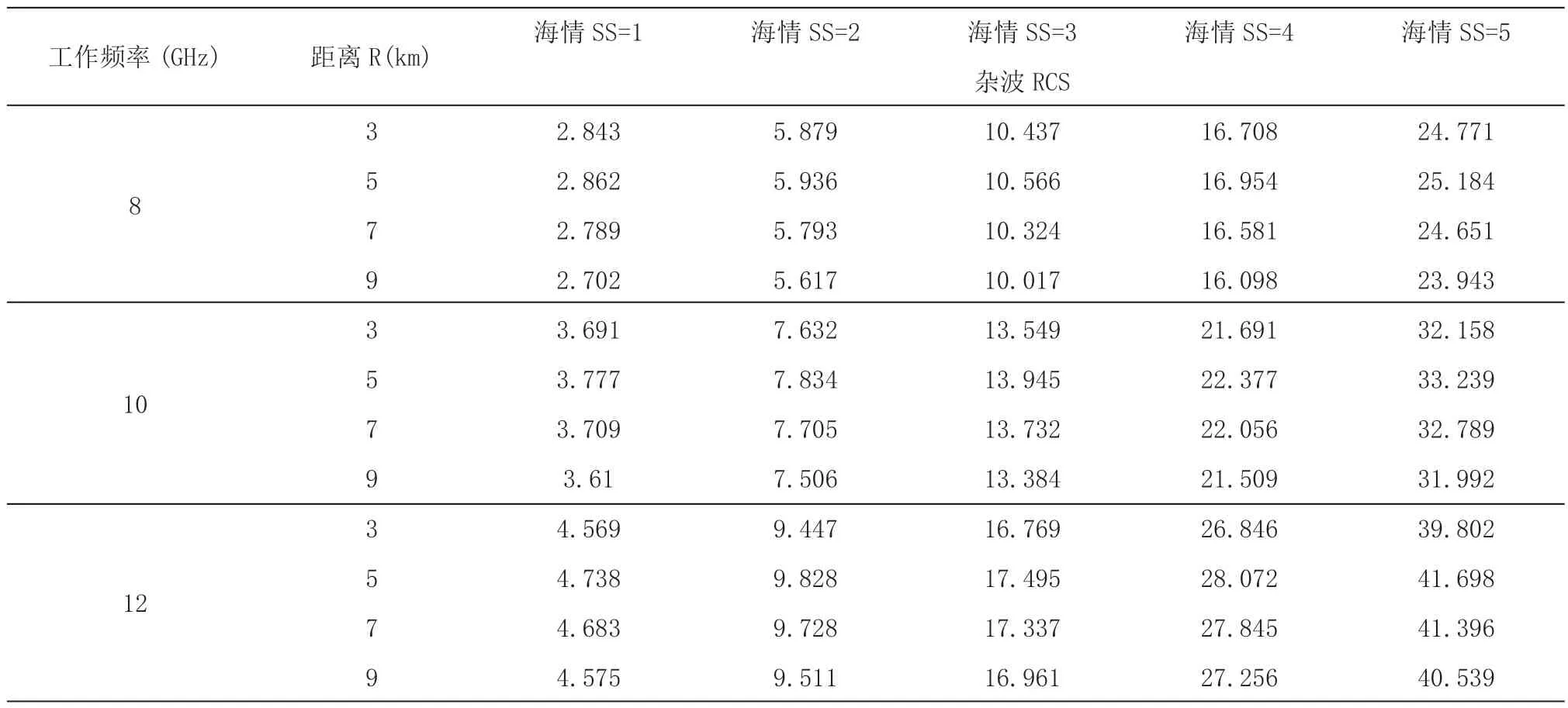
表2 仿真結果
1.2 雜波區域面積
此處,主要討論的雜波區域的面積是指進入天線主瓣的雜波。建立如圖1 所示的雜波幾何圖。角度和分別表示方位和垂直維的3 dB 波束寬度;表示擦地角即掠射角;雷達高度(從地面到天線相位中心)由表示,目標高度由表示;目標斜距是,其在地面上的投影為;距離分辨率是,其在地面的投影為;主瓣雜波區的面積由表示[9]。

圖2 f=8 GHz 時,不同海情下雜波RCS 隨距離的變化

圖3 f=10 GHz 時,不同海情下雜波RCS 隨距離的變化
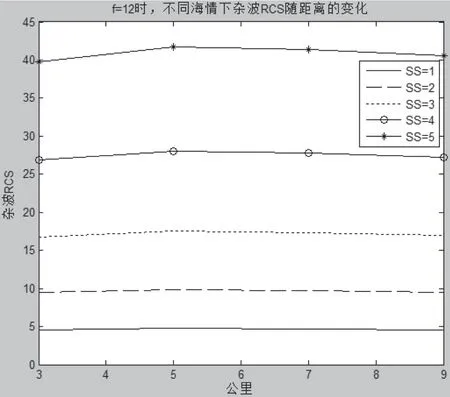
圖4 f=12 GHz 時,不同海情下雜波RCS 隨距離的變化
將主瓣雜波區的面積近似為矩形,由上圖可得雜波區域的面積為:
2 基于艦載雷達的海雜波RCS 仿真
為了驗證海雜波的后向散射特性,對不同工作頻率,不同海情,距離條件下的雜波RCS 進行仿真。仿真具體參數設置分別是:工作頻段為X 波段,距離分辨率27.5 m,方位角3 °,垂直極化。
繪制出同一頻率下,不同海情條件下雜波RCS 隨距離的變化情況。
觀察仿真結果,可以了解到在艦載雷達所處的環境下,海情越大,其所受到的海雜波散射截面積越大,對艦載雷達的干擾性越強。在信號處理算法中,我們可以針對海雜波的這種后向散射特性進行特別的抑制處理,從而降低海雜波對艦載雷達的影響[10]。
可通過設計雜波抑制軟件,實時接收實際雷達系統采集的回波數據;同時也可實現離線數據讀取與回放。在軟件獲取數據后,經過數據接收、數據預處理、信號處理和智能環境感知等四大模塊,最終輸出目標檢測結果。首先,通過數據接收模塊將來自雷達的實時數據或者讀入的保存數據進行接收與存儲;之后通過預處理模塊對數據進行分離并讀取有效數據;之后,通過信號處理模塊對獲取的有效數據進行信號處理,此處會選用專門的雜波抑制濾波器對數據進行處理;最后將信號處理模塊處理后的脈壓結果發給智能環境感知模塊進行當前環境參數估計,并反饋雜波抑制的相關參數用于雷達去海雜波處理,最終輸出目標檢測結果等相關信息。
通過以上處理方式,可對不同海情下的海雜波進行抑制處理,最終使雷達獲得更高的目標探測性能。
4 結語
本文在艦載雷達所受海雜波的基礎上,分析了海雜波的后向散射特性,提出了雜波散射系數和雜波區域面積,基于海雜波的后向散射特性對于海雜波的散射截面積進行了建模與仿真。利用這種方法,可以對艦載雷達的海雜波后向散射特性進行分析,有針對性的在艦載雷達中進行雜波抑制處理。