模型驅動的裝備數字化試驗方法研究
2024-04-26 08:17:02陳小鳳商堯軍初琛肖偉
環(huán)境技術 2024年3期
關鍵詞:模型
陳小鳳,商堯軍,初琛,肖偉
(中國電子科技集團公司第五十二研究所,杭州 311121)
引言
數字化驅動裝備轉型升級,智能化引領裝備創(chuàng)新發(fā)展。隨著數字化設計、虛擬仿真和數字孿生等技術的發(fā)展和應用過程,產生了數字樣機、數字裝備、數字仿真平臺等。數字裝備是物理裝備的數字化表達,涉及“幾何-物理-行為-規(guī)則”多維度數字化模型構建和“機-電-液-熱-力-磁”等多學科模型融合,應與物理實體裝備同步交付,滿足試驗訓練、體系運用推演、保障行動規(guī)劃等應用要求[1]。
裝備數字化試驗是在數字空間構建裝備測試環(huán)境,采用虛實結合的試驗測試方法,綜合利用數字仿真平臺、數字模型、實錄數據,通過設計實戰(zhàn)化、體系化試驗場景,對裝備性能進行全面檢驗,從而解決當前實裝試驗驗證手段存在的效率低、成本高等問題,破解現實開展大規(guī)模、體系化、實戰(zhàn)化試驗的局限。
1 裝備數字化試驗發(fā)展
2018 年 6 月,美軍發(fā)布數字工程戰(zhàn)略,旨在將美軍采辦流程由以文檔為中心轉變?yōu)橐詳底帜P蜑橹行模瓿梢阅P秃蛿祿楹诵闹\事做事的范式轉移。2019 年3 月,美海軍利用“虛擬宙斯盾”系統(tǒng)控制真實的艦載AN/SPY-1 雷達,成功進行“標準-2”導彈目標攔截試驗,驗證了“虛擬宙斯盾”系統(tǒng)作為真實“宙斯盾”系統(tǒng)的數字孿生,可以替代實物裝備參與實戰(zhàn)測試;美海軍信息戰(zhàn)司令部完成了首個數字孿生模型“數字林肯”開發(fā),在系統(tǒng)交付前通過數字空間對解決方案進行仿真評估,提前發(fā)現問題,縮短研制周期,節(jié)約研制成本。2021 年9 月,受美國國防部作戰(zhàn)試驗鑒定局委托,美國國家學院(NASEM)發(fā)布了《確保美防務系統(tǒng)作戰(zhàn)優(yōu)勢的國防部靶場能力:未來戰(zhàn)斗的測試(2021)》評估報告,提到借助數字工程戰(zhàn)略推動試驗鑒定由實裝向數字化轉型,在一體化試驗鑒定工作中引入基于模型的系統(tǒng)工程、動態(tài)數據驅動應用系統(tǒng)等新概念,從而在實現武器系統(tǒng)快速部署的同時保證風險可控[2]。
我國在 《“十四五”數字經濟發(fā)展規(guī)劃》中提出,要深入實施智能制造工程,大力推動裝備數字化。裝備數字化試驗作為裝備數字化建設中不可或缺的一環(huán),可以推動裝備數字化設計、數字化裝配和數字化制造,實現國防工業(yè)降低成本、加快試驗進程、縮短周期,推動全面實現武器裝備數字化建設轉型。裝備數字化試驗也是信息化背景下提升裝備質量、完善裝備試驗流程的重要手段,對裝備整體建設具有重要意義[3]。
2 裝備數字試驗仿真系統(tǒng)架構
裝備數字化試驗仿真系統(tǒng)架構如圖1 所示,由數字仿真平臺和仿真應用兩部分構成,支持單裝數字化試驗和裝備體系試驗。面對裝備數字化建設這一新的挑戰(zhàn),裝備數字化試驗還存在著仿真基礎軟件國產化率不高、數字模型全流程貫通傳遞困難、數字化試驗方法和規(guī)程缺乏等問題。
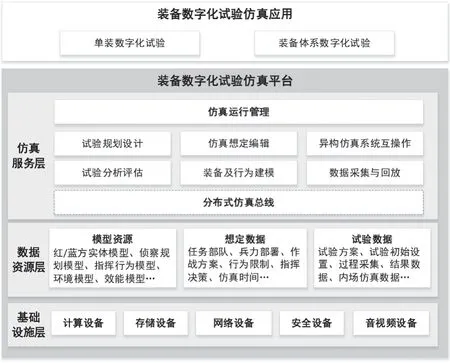
圖1 裝備數字化試驗仿真系統(tǒng)架構
3 數字化試驗仿真平臺
裝備數字化試驗仿真平臺是依托計算、存儲、網絡和仿真服務等基礎環(huán)境,支撐裝備試驗數字仿真應用運行的通用平臺,具備試驗規(guī)劃設計、仿真想定編輯、裝備及行為建模、試驗分析評估、仿真運行管理、數據采集與回放等能力,實現對試驗數據資源的集中管控、按需配置、動態(tài)調用和共享使用,支持分布式部署和異構仿真系統(tǒng)接入。
目前,數字仿真平臺軟件研發(fā)主要基于COMMAND、VBS、Xsim、Maxsim 和AFsim 等通用仿真平臺進行拓展和定制,下面從適用范圍、模型開發(fā)調試和人在回路支持等方面對幾種通用仿真平臺進行了對比分析,詳見表1。
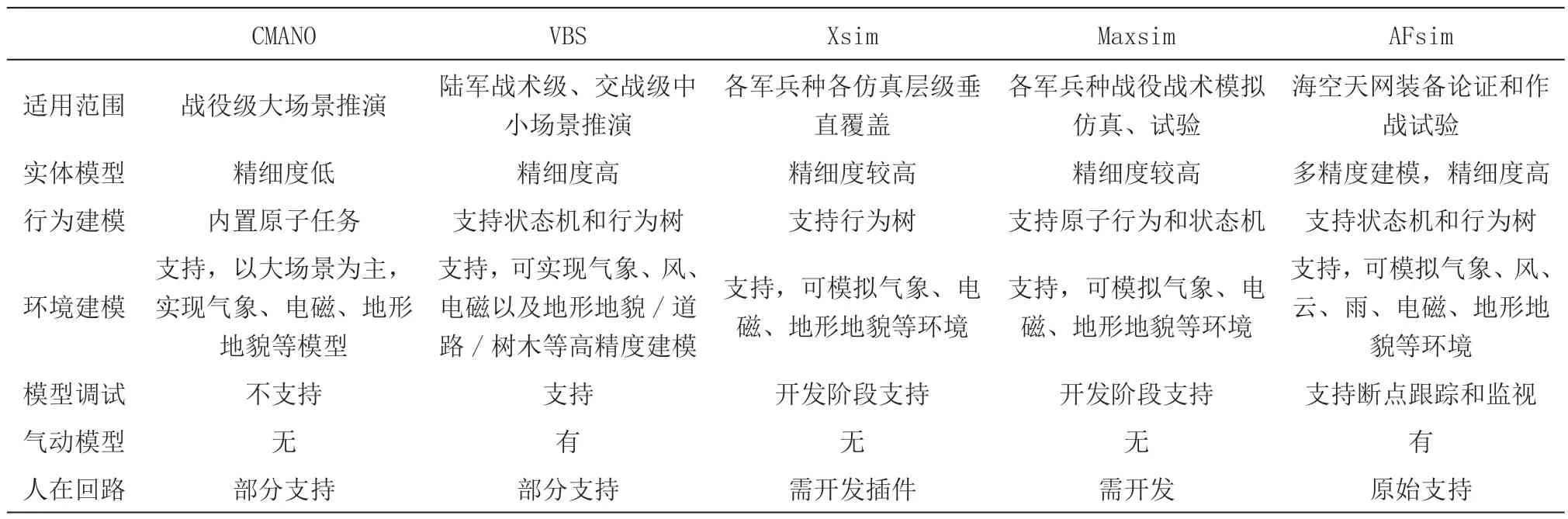
表1 通用仿真平臺軟件對比分析
CMANO:該平臺是美國Matrix 公司開發(fā)的Command Modern Air/Naval Operation Pro(指揮:現代海空行動專業(yè)版,簡稱CMANO),2016 年被美國空中機動司令部、海軍戰(zhàn)爭學院以及其他多個國家軍事學院采納作為模擬推演訓練工具[4]。北京華戍防務開發(fā)的墨子聯合作戰(zhàn)推演系統(tǒng),涵蓋了平臺的大部分模型和內容,針對陸海空天電多軍種聯合作戰(zhàn)行動,仿真顆粒度達到戰(zhàn)役級和任務級。
VBS:該平臺是每個BISim 公司開發(fā)的沉浸式虛擬作戰(zhàn)系統(tǒng)(Virtual Battle System,簡稱VBS)。在美國陸軍合成訓練環(huán)境(STE)中提供核心功能,支持進行現實的、多軍種多領域的聯合武器機動和任務指揮、集體訓練;新西蘭陸軍也已選擇VBS4 進行戰(zhàn)術指揮和控制訓練。
Xsim:該平臺由北京華如科技自主研發(fā),采用基于智能體的建模仿真方法,融合了面向對象、組件化、參數化等建模手段,提供仿真運行引擎和多種建模工具,基于統(tǒng)一的框架+插件的軟件架構可自由拓展模型體系與仿真服務[5]。滿足裝備論證、模擬訓練和試驗鑒定領域仿真應用需求。
Maxsim:該平臺由北京神舟智匯自主研發(fā),采用先進黑板(GBB)技術進行交互,基于多Agent 建模思想實現一個具有開放性的分布式仿真系統(tǒng)。可應用于陸海空天電等各軍兵種的戰(zhàn)術模擬訓練仿真、作戰(zhàn)實驗和裝備論證,支持各種二次開發(fā)和定制服務[6]。
AFsim:該平臺由美國空軍研究實驗室(AFRL)開發(fā)和維護,基于 C++的模塊化、面向對象方法實現多領域、多分辨率的建模和仿真框架,通過插件可以對框架進行擴展并集成新開發(fā)的平臺組件模型、新擴展的平臺功能,以及新擴展的仿真服務。
4 裝備模型構建
裝備試驗模型按試驗要素維度,可分為被試裝備模型、陪試裝備模型、試驗環(huán)境模型、試驗設備設施模型、藍軍模型、作戰(zhàn)規(guī)則/行為模型等,這些要素形態(tài)上通常表現為實物、半實物和數字模型。本文以“基于AFsim 的空中平臺紅藍對抗仿真”為例,探討數字化實體模型設計、行為仿真建模和數字化試驗環(huán)境構設。
4.1 裝備實體參數建模
裝備實體模型以平臺、武器、傳感器等進行組件化建模,提高模型復用率。以某虛擬無人戰(zhàn)斗機(Uninhabited Combat Aerial Vehicle,簡稱UCAV)為例,該平臺設計上配備左右各1 套SAR 雷達裝備、1 套ESM 電子偵察裝備,并攜帶美制GBU-38 導彈。基于AFsim 的裝備實體模型設計如圖2 所示。
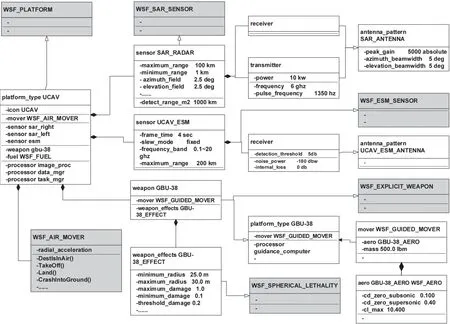
圖2 某虛擬無人戰(zhàn)斗機(UCAV)實體裝備模型設計示例

圖3 AFsim 平臺行為樹結構定義示意
圖中:WSF_AIR_MOVER 空中機動平臺模型、WSF_SAR_SENSOR 雷達裝備模型、WSF_ESM_SENSOR 電子偵察裝備模型、WSF_EXPLICIT_WEAPON 顯性武器裝備模型、WSF_GUIDED_MOVER 導彈機動平臺模型、WSF_AERO 空氣動力特性模型等為AFsim 平臺的基礎通用實體模型;從這些基礎模型可拓展出具體型號無人戰(zhàn)斗機(UCAV)裝備的實體模型,根據型號作戰(zhàn)需求對實體模型組成、性能參數以及基本行為進行建模設計。實體模型性能參數如SAR 雷達傳感器實體模型的探測范圍、雷達和ESM 的收/發(fā)天線模式、彈的威力特性以及彈平臺的空氣動力特性等。Afsim 仿真建模腳本示意如下:
platform_type UCAV WSF_PLATFORM # 定義名為UCAV 類型的虛擬無人戰(zhàn)斗機
icon UCAV
mover WSF_AIR_MOVER #定義裝備空中機動平臺屬性
default_radial_acceleration 1.5 g
at_end_of_path remove
end_mover
sensor esm UCAV_ESM #裝備掛載一個UCAV_ESM類型的傳感器
……
end_sensor
sensor sar_left SAR_RADAR #裝備左邊掛載一個SAR_RADAR 類型的雷達
……
end_sensor
sensor sar_right SAR_RADAR #裝備右邊掛載一個SAR_RADAR 類型的雷達
……
end_sensor
weapon gbu-38 GBU-38 #裝備掛載一個GBU-38 類型的導彈
……
quantity 2 end_weapon
processor task_mgr WSF_TASK_PROCESSOR # 定義裝備行為
……
end_processor
end_platform_type
4.2 行為仿真建模
行為仿真建模包括裝備行為仿真建模和作戰(zhàn)行為仿真建模。
“裝備行為仿真建模”是基于裝備的戰(zhàn)技術指標性,分解出偵察、打擊、機動、通信等行為,可構建不同環(huán)境下的裝備行為模型。空中飛行平臺橫滾行為建模是典型的“裝備行為仿真建模”,用于測試驗證裝備的機動性能。橫滾是飛機以機頭和機尾所形成的軸線做陀螺運動,過程中飛行運動方向不發(fā)生改變。在戰(zhàn)機格斗中如果本機航速比敵機快導致即將錯過敵機,可采用橫滾行為來減慢速度從而保持良好的攻擊位置;或當敵機處于本機6 點位置且距離很近時,采用橫滾使敵機錯過本機從而進行防御。
“作戰(zhàn)行為仿真建模”聚焦動態(tài)因素,面向不同實體和環(huán)境,以試驗/作戰(zhàn)目標為驅動,構建在戰(zhàn)場環(huán)境約束下的編組協同、戰(zhàn)場感知、聯合火力打擊、搶救搶修等戰(zhàn)術行為模型,通常采用聯合作戰(zhàn)仿真模式。以無人戰(zhàn)機雙邊截擊行為建模為例,我方兩架飛機沿著敵方航向角方向的兩個垂直方向飛行,當到達敵方雷達探測區(qū)域外時,或者超過友方最遠救援距離時,或敵方首先發(fā)起進攻時,停止切向飛行,轉為防守策略進行攻擊。
AFsim 采用了基于行為樹的行為建模方法。行為樹由根節(jié)點和邏輯節(jié)點構成,如3圖所示。根節(jié)點(advanced_behavior_tree)以一定頻率向其子節(jié)點發(fā)送使能信號,通過邏輯節(jié)點逐層傳遞給動作節(jié)點或條件節(jié)點,并接收節(jié)點的返回結果;邏輯節(jié)點包括選擇節(jié)點、序列節(jié)點、并行節(jié)點、隨機節(jié)點和行為節(jié)點等。
行為樹上幾類邏輯節(jié)點執(zhí)行說明如下:
1)序列節(jié)點(sequence):依次執(zhí)行所有子節(jié)點,任何子節(jié)點的前置條件執(zhí)行失敗,則序列執(zhí)行失敗;
2)并行節(jié)點(parallel):所有子節(jié)點不分先后同時執(zhí)行;
3)選擇節(jié)點(selector):選擇執(zhí)行某一個子節(jié)點,任何子節(jié)點執(zhí)行成功,其它所有子節(jié)點將被跳過;
4) 優(yōu)先級選擇節(jié)點(priority_selector): 選擇執(zhí)行分值最高的子節(jié)點,子節(jié)點分值由其先決條件(precondition)決定;
5)隨機節(jié)點(weighted_random):加權隨機方式選擇執(zhí)行某一個子節(jié)點;
6)行為節(jié)點(behavior_node):通常是行為樹的葉節(jié)點,用于定義某動作或任務的功能節(jié)點,由平臺模型(platform_type)定義的處理器(processor)解析并執(zhí)行。
以飛機橫滾機動行為為例,Afsim 仿真建模腳本如下:
advanced_behavior horizontal_roll # 定義裝備的橫滾機動行為
script_variables #定義行為函數使用的變量
……
end_script_variables
precondition #定義執(zhí)行該行為的條件
…… #如本機航速過快,與敵機距離近,即將錯過敵機
end_precondition
execute #定義橫滾行為具體實現方式
……#如按一定的節(jié)拍轉變
end_execute
end_advanced_behavior
以雙邊截擊作戰(zhàn)行為樹為例,Afsim 仿真建模腳本如下:
processor DOUBLE_SIDE_BEHAVIOR_TREE WSF_QUANTUM_TASKER_PROCESSOR
advanced_behavior_tree #定義雙邊截擊作戰(zhàn)行為樹
……
selector # 雙邊策略
selector
……
selector
selector
behavior_node evade_of_double_side # 置尾
behavior_node cut_of_double_side # 切向機動
behavior_node horizontal_roll # 橫滾機動
end_selector
behavior_node attack_target_of_double_side # 發(fā)射
behavior_node go_home # 返航
end_selector
end_selector
end_selector
end_advanced_behavior_tree
end_processor
4.3 試驗環(huán)境構設
為提高裝備數字化試驗真實性,并對裝備潛在的和客觀存在的性能進行動態(tài)研究,試驗環(huán)境構設以分布式邏輯靶場為基礎,統(tǒng)籌數字模擬器、半實物仿真系統(tǒng)、環(huán)境模擬系統(tǒng)等試驗資源,基于L(真實)-V(虛擬)-C(構造)仿真體系架構,打造貼近實戰(zhàn)、逼真的一體化聯合仿真試驗[7]。試驗環(huán)境模型體系主要包括以試驗想定目標區(qū)域為主構建場景模型(山地/河谷/海岸/機場/港口/建筑物等)、場模型(氣象/海洋/云霧/電磁等)、流模型(水流/風沙等)、設施模型(地面設施/核生化地帶/障礙物等)等。
基于AFsim 的試驗想定中環(huán)境作為全局參數(global_environment)進行設定。地貌(land_cover)設置支持城市環(huán)境、牧場草原、灌木草地、落葉林、針葉林、濕地森林、無林濕地、荒野沙漠、水環(huán)境等;地形(land_formation)設置支持起伏、傾斜、丘陵、陡峭、山脊等;海面狀態(tài)(sea_state)設置參照國際海洋波高等級劃分標準,支持無浪、微浪、小浪、輕浪、中浪、大浪、巨浪等;并支持設置風速、風向、云水密度、降雨強度、沙城暴能見度等環(huán)境變量。裝備模型構建過程中需結合裝備自身特性開展環(huán)境相關影響分析和設計,才能確保數字化試驗中充分開展裝備性能驗證。
5 模型驅動的裝備數字化試驗
5.1 模型驅動的單裝數字化試驗
數字裝備的交付物包括面向裝備運用仿真應用的功能清單、不同環(huán)境和使用條件下的使用性能、不同環(huán)境條件下的目標特性、圖紙圖樣、技術手冊、使用手冊等,以及能夠在數字平行戰(zhàn)場環(huán)境開展仿真推演的裝備數字仿真模型。交付物表現形式主要為結構化文本文件、算法/參數集、IETM 和仿真程序。單裝數字化試驗是圍繞特定使命任務目標,結合試驗環(huán)境和試驗條件,基于裝備數字仿真模型開展的試驗測試工作,主要對數字裝備的功能性能、作戰(zhàn)效能和適用性進行考核評估。
以UCAV 裝備試驗為例,在試驗仿真想定中設定海面環(huán)境和風速風向,增加一個UCAV 類型的對象100_ucav,該對象在預設時間按照指定航線和途徑點飛行,并在指定條件下進行橫滾飛行試驗。Afsim想定腳本如下。
global_environment #試驗環(huán)境
sea_state 2 #海面輕微小浪
wind_speed 10 m/s #風速
wind_direction 270 deg #風向
end_global_environment
platform 100_ucav UCAV #對象名稱100_ucav
side blue #陣營--藍方
commander SELF #單裝試驗
creation_time 10.0 min #
position 38:16:36n 116:19:48w altitude 35000 ft msl #起始位置#
route #定義航線
navigation #定義航線途徑點
position 38:16:36n 116:19:48w altitude 35000 ft msl #途經點1
speed 460 kts #速度
……
end_navigation
end_route
heading 259.6 deg #航向
end_platform
想定腳本執(zhí)行仿真效果如圖4。
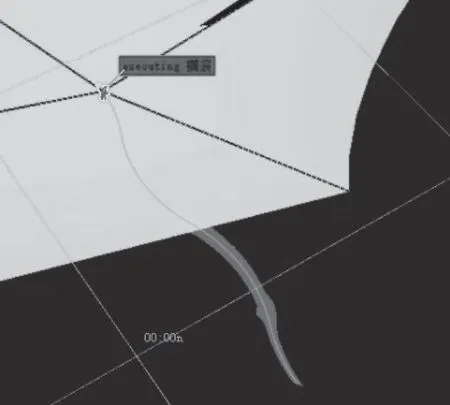
圖4 UCAV 裝備橫滾機動行為仿真效果示意
5.2 裝備體系數字化試驗
裝備體系數字化試驗是在數字平行戰(zhàn)場環(huán)境中,按照特定任務典型作戰(zhàn)流程,考核裝備體系效能和適用性,檢驗評估裝備體系完成特定任務能力的試驗活動。開展裝備體系數字化試驗正逐步成為裝備體系試驗工作中必不可少的一個重要環(huán)節(jié),可以緩解實際情況中裝備體系試驗時間周期長、不易展開的現實壓力。以2V2 紅方防守進攻、藍方交叉進攻的交戰(zhàn)仿真為例,Afsim 部分紅方想定腳本如下:
platform red_ground_leader FLIGHT_LEAD #紅方虛擬地面指揮所
side red
commander SELF
position 00:00:00n 05:00:00w altitude 0 ft agl #指揮所位置
end_platform
platform Red_1 FJ_Z_ZD_J #紅方虛擬戰(zhàn)機1
side red
heading 90 deg
commander red_ground_leader #指定上級指揮所
route #指定航線和途經點
position 00:00:00n 02:00:00w altitude 30000 ft speed 450 kts
……
end_route
end_platform
platform Red_2 FJ_Z_ZD_J #紅方虛擬戰(zhàn)機2
……
end_platform
腳本執(zhí)行仿真效果如圖5。
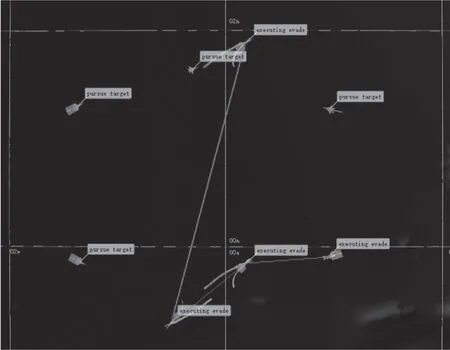
圖5 無人戰(zhàn)機執(zhí)行雙邊截擊任務行為建模仿真示意
6 結束語
裝備試驗貫穿與裝備建設全壽命周期,目前國家正處于裝備數字化轉型的重要階段。裝備數字化試驗作為裝備試驗發(fā)展進展中的重要形式和必要環(huán)節(jié),設置裝備數字化試驗標準規(guī)范的業(yè)務流程、構建統(tǒng)一的模型數據標準和模型置信度檢驗標準,是促進裝備數字化試驗建設的重要途徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19