基于RTDS的應急發電車模擬運行特性研究
2024-04-26 00:00:00郭強唐志鵬陸斌胡翔董晏秀
消費電子 2024年3期
【關鍵詞】RTDS;應急發電車;實時數字仿真器;仿真測試平
引言
隨著電力系統規模的不斷擴大及快速發展,作為研究仿真電力系統暫態過程而開發的實時數字仿真器(Real-TimeDigital Simulator, RTDS),已成為一種電力系統領域里研究復雜電力系統現象的有效手段[1-3],通過RTDS實現的電機數字仿真可有效運用于實際電機的設計和測驗中。
現有應急發電車[4]的數字仿真方法無法反映真實系統中的各種電磁耦合現象,存在精度誤差[5-8]。
本文提出一種基于RTDS的應急發電車模擬方法,通過對應急發電車建模,模擬應急發電車功率因數控制下的實際運行,得到了基于RTDS的應急發電車不同控制下的仿真特性。
一、基于RTDS的應急發電車建模分析
對于應急發電車的發電系統,其主要包括對應額定功率的發電機組和油箱。通常發電機組根據電力保障負荷需求進行選擇,油箱儲油量可保證發電機滿負荷工作不少于8小時。而不同品牌的發電機組調速器與勵磁器有一定差異,對多中壓發電車的并機并網有一定影響。
應急發電車配電系統主要提供10kV的交流配電,通過配置總開關,可輸出航空快速接插件、電纜及電纜絞盤。不同品牌應急發電車配電系統僅在開關及容量上存在差別,對多臺應急發電車的并網運行無明顯影響。
應急發電車的裝載系統一般采用中型或重型二類底盤。車輛需配置進排風系統、平衡支撐系統、照明系統、環境監控系統等。不同品牌應急發電車的裝載系統僅存在承重、散熱、速度等方面的差異,對多臺應急發電車的并機并網運行無明顯影響。

應急發電車由柴油發動機、同步發電機、調速器、勵磁控制器、升壓變、電氣和機械傳感器構成,進行電磁暫態仿真建模時,需要根據其內部控制特性建立狀態方程,并進行控制框圖的確認,以此搭建電磁暫態仿真模型。
基于RTDS的應急發電車模擬方法,包括通過RTDS編程的原動機仿真模塊、同步發電機仿真模塊,發電機勵磁系統仿真模塊和發電機組集成硬件控制器模塊。其整體模型如圖1所示,配置內部控制參數、外部負荷及線路參數,啟動控制器與RTDS,即可進行仿真。
(一)應急發電車原動機模塊
對基于RTDS的應急發電車整體模型中的原動機機動力學進行建模。其中,發電車原動機模塊的單位阻尼常數D可由式(1)所得:
其中,ωm為運動機的單位機械速度,tstop為停止時間,H為單位慣性常數。
如果原動機沒有以預期停止時間的150%停止,則控制器設置為警報狀態。
當發電機組控制器啟動器輸出設置為on時,機械轉矩設置為啟動轉矩Tstart。啟動轉矩的值是根據原動機的預期啟動時間tstart選擇的。使用與計算阻尼常數相同的程序,通過將電動轉矩設置為0.0p.u,可以使用(2)式來計算合適的啟動轉矩:
(二)發電機勵磁系統模型及控制器硬件集成
勵磁系統模型使用永磁先導勵磁機作為主勵磁電壓調節器電源。
兩個發電機組控制器使用千兆級RTDS收發器,IO卡連接到模擬發電機組模型,用于放大±10 V電壓,分別輸出到控制器的PT和CT輸入處,用于測量發電機電壓Vt,abc和電流Is,abc,以及母線電壓 Vb,abc。
數字輸出的頻率上限受模擬時間步長 tstep 的限制。 給定軸速度 fm 和飛輪齒數 Nteeth條件下, MPU 信號的平均脈沖寬度 tpulse可以用公式(4)計算:
本方法提出了一種基于RTDS的應急發電車模擬方法,可用來模擬應急發電車中核心的發電機部分。由于采用了RTDS半實物仿真的方法,能夠反映真實系統中的各種電磁耦合現象,降低仿真與實際間的誤差,指導應急發電車的運行控制研究。
二、單臺應急發電車運行特性仿真分析
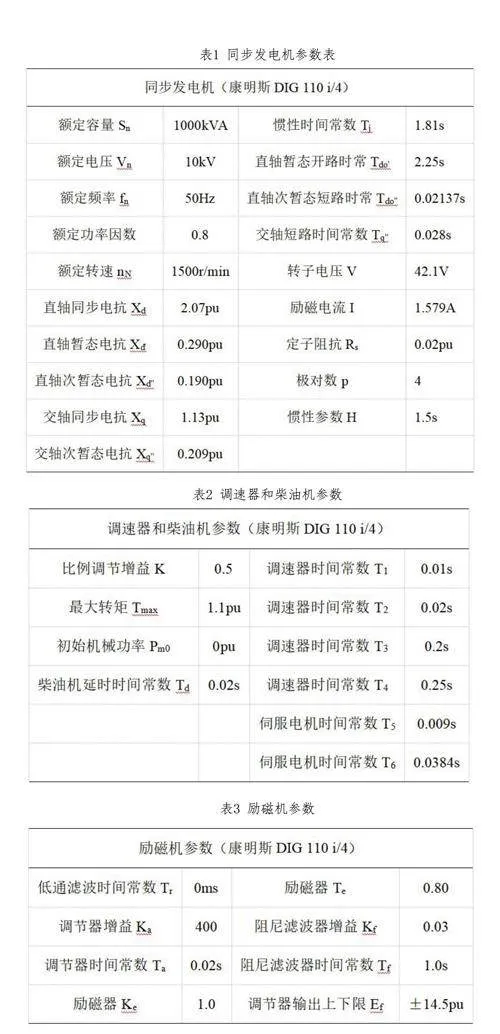
根據廠家資料收集,得到康明斯品牌10kV 柴油發電機組DIG 110 i/4的參數,如表1表2表3所示,根據改參數,搭建應急發電車內部柴油發電機組及控制模型,對單臺機組的恒功率因數和定電壓控制進行仿真分析。
(一)超前功率因數控制仿真
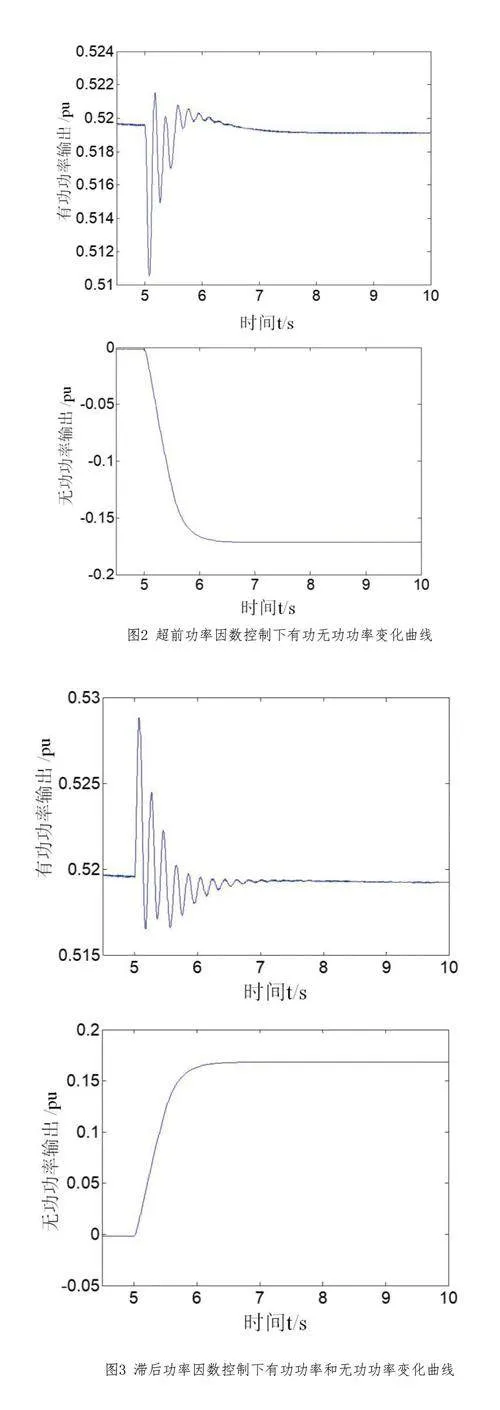
為驗證超前功率因數控制能力,設定勵磁器功率因數在t=5s時由初始值1變化到0.95,圖2為該種控制方式下柴油發電機的有功及無功功率標幺值輸出曲線,可以看出,模型可以實現很好的超前功率因數控制能力,有功功率輸出在經過很小的波動后,達到穩定,由于功率因數超前,所以無功功率由0降為負值。
圖2為超前功率因數控制下勵磁電壓輸出曲線,可以看出,在功率因數發生變化后,勵磁電壓開始下降,功率因數達到穩定后,勵磁電壓經過短暫的上升后達到一個穩定值。
(二)滯后功率因素控制仿真
為驗證滯后功率因數控制能力,與超前功率因數控制相同,給定勵磁器功率因數,通過改變勵磁器控制方式中的值來實現功率因數的滯后,圖3分別為滯后功率因數控制方式下有功功率和無功功率輸出曲線圖。由圖3可知,有功功率經過微小波動后達到穩定,其輸出值近似于超前功率因數控制方式下的輸出有功值,無功功率由0經短時間后開始上升,最后穩定在一個與超前功率因數控制方式下穩定輸出無功值相反的正值。
由滯后功率因數控制方式下的勵磁電壓輸出曲線圖可以看出,在勵磁器參考功率因數的變化過程中,勵磁電壓的變化過程與超前功率因數控制方式下的勵磁電壓變化相反,開始處于上升狀態,功率因數穩定后,經短暫時間下降并達到一個穩定值。
(三)定電壓控制仿真
為了驗證該柴油發電機模型勵磁器可以實現定電壓控制,設定參考電壓在t=5s時由1變化到1.01穩定至7s后下降至0.995達到穩定,圖4分別為定電壓控制方式下該柴油發電機的有功功率、無功功率輸出曲線,可以看出該模型可以實現定電壓控制,在參考電壓上升或下降達到穩態的過程中,有功功率均經過短暫波動后達到穩定值,由圖4可知,無功功率隨著參考電壓的變化趨勢變化,對于無功功率穩定輸出值,參考電壓為0.995時,無功功率為一個較小負值,參考電壓為1.01時,無功功率為一個較小的正值。即無功功率的臨界參考電壓為0.995與1.01之間。
在定電壓控制方式下,柴油發電機的勵磁電壓輸出曲線隨著參考電壓的變化趨勢變化,當參考電壓達到穩定值后,勵磁電壓較平緩的過渡達到穩定值。

(四)無功功率因素控制仿真
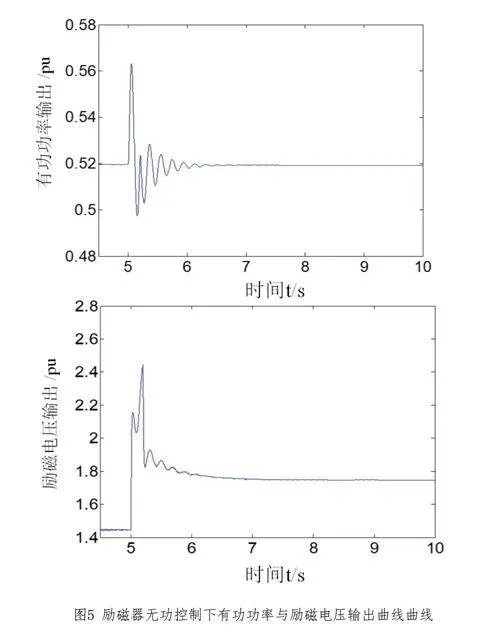
為了驗證該模型可以實現無功功率控制,設定無功功率控制量在t=5s時由0變化到0.2。其變化曲線如圖5所示。
由圖可知,在勵磁器在無功功率控制方式下,由柴油發電機的輸出有功功率曲線與勵磁電壓輸出曲線可知,所建勵磁模型可以實現無功功率控制,在無功功率調節過程中,有功功率及勵磁電壓經過短暫的波動后達到穩定。
結論
本文基于RTDS的應急發電車模擬方法,通過RTDS模擬應急發電車不同運行模塊,得到了不同控制下的應急發電車運行特性。本文通過仿真得到的結論如下:
(1)在超前功率因素控制下,應急發電車有功功率在經過很小的波動后,達到穩定,無功功率由0降為負值;勵磁電壓開始下降,功率因數達到穩定后,勵磁電壓經過短暫的上升后達到一個穩定值
(2)在滯后功率因素控制方式下,應急發電車有功功率經過微小波動后達到穩定,無功功率由0經短時間后開始上升,最后穩定在一個與超前功率因數控制方式下穩定輸出無功值相反的正值;勵磁電壓開始處于上升狀態,功率因數穩定后,經短暫時間下降并穩定在與超前功率因數控制方式下穩定輸出勵磁電壓近似的值
(3)在定電壓控制下,參考電壓上升或下降達到穩態的過程中,有功功率均經過短暫波動后達到穩定值,無功功率的臨界參考電壓為0.995與1.01之間;勵磁電壓隨著參考電壓的變化趨勢變化,當參考電壓達到穩定值后,勵磁電壓較平緩的過渡達到穩定值
(4)在無功功率因素控制下,中壓發電車有功功率及勵磁電壓經過短暫的波動后達到穩定。