一種移動作業機器人環境交互作用模型分析
2024-05-07 02:49:20丁曉軍
中國新技術新產品 2024年6期
丁曉軍 馬 琴
(1.北方民族大學電氣信息工程學院,寧夏 銀川 750021;2.北方民族大學土木工程學院,寧夏 銀川 750021)
由于勞動力短缺和人口紅利逐漸消失,因此“機器人換人戰略”迫在眉睫,移動作業機器人正是在這個背景下應運而生[1]。根據機器人與環境交互的特性,可將其分為2類。一類是機器人在自由空間中的非接觸(無約束)運動,沒有相關的環境影響施加在機器人上,例如抓取-放置、噴涂和電弧焊等簡單任務[2];另一類是一些復雜的高級任務,例如裝配和加工,需要考慮機械手與環境之間的耦合[3]。
本文分析了移動作業機器人與環境交互作用過程,并基于拉格朗日方程推導了接近、受限運動和沖擊3種情況下機器人-環境交互作用模型。然后,仿真驗證由4個麥克納姆(Mecanum)輪構成的全向移動平臺和由1個6自由度操作臂組成的移動作業機器人。
1 臂-環境交互作用模型
在機器人操作臂末端安裝執行器,在進行作業的過程中,機器人將與環境接觸。一般將接觸任務劃分為3個階段,即接近、沖擊和受限運動。在接近階段,末端執行器向約束移動,以低速接近目標物,以避免碰撞。但是,在實際工況中,機器人會受到擾動影響,進而與約束發生碰撞,導致速度發生突變,沖擊階段結束后,開始受限運動階段。為了便于描述,本文先分析接近(自由)階段和受限運動階段2個運動過程,然后分析沖擊階段。
1.1 接近階段
操作臂與環境交互如圖1所示。接近階段如圖1(a)所示,r為操作臂,e為動態環境。假設操作臂有nr個自由度,環境有ne個自由度,采用位置向量分別定義操作臂與環境的運動,則整個系統的位置可用一個統一的向量q表示,如公式(1)~公式(3)所示。
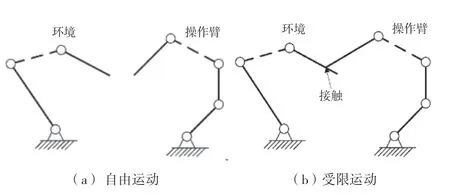
圖1 操作臂與環境交互
式中:q的維數為n=ne+nr。
這2條鏈的動力學模型分別如公式(2)、公式(3)所示。
式中:,為速度;,為加速度;τe和τr為關節轉矩矢量;He和Hr為慣性矩陣;he和hr為重力、科里奧利力(Coriolis force)以及其他與位置和速度相關的力。
1.2 受限運動階段
受限運動階段如圖1(b)所示。為便于描述,2個鏈分別引入1組新的坐標(外部坐標)se和sr,令se=(se1,...,sen),sr=(sr1,...,srn)。坐標q與坐標s之間的關系表征了運動學模型。將坐標se定義為絕對坐標,通常集合se與qe一一對應,并呈非線性關系,如公式(4)所示。
操作臂末端相對環境即固定在鏈條(e)最后一環的坐標的坐標變換如公式(5)所示。
則整個系統的外部坐標如公式(6)所示。
外部坐標sr是為了便于描述給定的任務而定義的,當發生接觸時,這些坐標中的一些值將減為0,當1個接觸約束限制了nc個自由度時,nc坐標從集合sr減至sr-nc。f為自由坐標,將sf定義為整個系統自由坐標的集合,c為受接觸約束,sc為包括受接觸約束的坐標的集合,因此sf的維數為ne+nr-nc=n-nc,sc的維數為nc,如公式(7)所示。
約束(接觸)如公式(8)所示。
從動力學的角度進行分析,由于接觸產生反作用力,因此力分量的數目等于受限制的自由度的數目,在這種情況下的動力學模型如公式(9)、公式(10)所示。
式中:為操作臂與環境接觸后受約束環境的雅可比矩陣;為操作臂與環境接觸后受約束操作臂的雅可比矩陣。在公式(8)的約束條件下,公式(9)、公式(10)中的坐標qe和qr并不是獨立的。因此,公式(8)、公式(9)以及公式(10)構成了整個系統的動力學模型,并表示ne+nr+nc個標量方程的集合,通過求解可得運動(qe,qr)和接觸力F。為了得到適合數值積分的形式,對公式(8)進行求導,得到其約束的微分形式。
sc的一階導數如公式(11)所示。
式中:為sc的一階導數,為系統的速度。
sc的二階導數如公式(12)所示。
式中:為sc的二階導數,為系統的加速度;雅可比矩陣、與公式(9)、公式(10)中的相同,向量Ac如公式(13)所示。
公式(8)的微分形式如公式(14)所示。
公式(9)、公式(10)和公式(14)構成了整個系統的動力學模型。該模型包括ne+nr+nc個標量的線性方程,可以求解相同數量的未知數,包括ne維加速度分量,nr維加速度分量和nc維接觸力F。
考慮摩擦因素,將集合sf分離為sf=(se,),包括nr-nc個坐標,摩擦力的方向與接觸點的相對速度方向相反,如公式(15)所示。
式中:Ff為nr-nc個分量的摩擦矢量;|Ff|為其絕對值;v0為nr-nc個分量的矢量,它定義了相對速度的方向,其大小取決于接觸力、表面質量和相對速度。選取|Ff|=μ|F|,其中,摩擦系數μ是常數。然而,精確的模型需要考慮相對速度矢量v0對μ的影響。矢量v0的方向由相對速度srf決定,如公式(16)所示。
式中:為操作臂與環境接觸后未受約束操作臂的雅可比矩陣;為操作臂與環境接觸后未受環境約束的雅可比矩陣。因此,v0與位置向量qe、qr和速度、均相關,摩擦力Ff如公式(17)所示。
公式(17)的具體形式視情況而定。
當接觸點有相對速度時,摩擦系數μ從零速度下的靜態摩擦變為動態摩擦,隨著接觸點相對速度增大,當摩擦系數克服發生運動的摩擦臨界值時,摩擦系數由負黏性摩擦變為黏性摩擦。摩擦力的存在會影響系統的動力學特性,因此,考慮摩擦后,公式(9)、公式(10)變為公式(18)、公式(19)。
當接觸物體間存在相對運動時,公式(14)、公式(18)和公式(19)構成了整個系統的動力學模型。雖然公式(17)中未知數的數量沒有增加,但是需要求解、和F。
假設在某一時刻相對運動完全停止(=0),那么公式(15)和公式(17)將不再適用,公式(18)、公式(19)中的摩擦力Ff變得不可解,這時需要增加一個條件,從相對運動不存在這一事實出發,如公式(20)所示。
公式(14)、公式(18)、公式(19)與公式(20)構成了系統的動力學模型,通過該模型,可以求解加速度、和反作用力F、Ff。將模型計算的Ff值與系統靜摩擦值進行比較,當其值大于靜摩擦值時,會再次產生相對運動,求解過程切換回公式(14)、公式(14)、公式(17)、公式(18)以及公式(19)。
1.3 沖擊階段
沖擊是接觸任務的第二個階段。面約束下的沖擊是最常見的,因此本文主要分析面約束下的沖擊問題。此時,sc(即坐標s6)變為0并且沖擊作用會沿著這個方向進行。如果考慮約束面的彈性,則可能出現跳躍。為了便于推導,這里僅考慮非彈性范圍內的沖擊問題。基于這種假設,操作臂末端執行器不會在第一次接觸后離開表面,而是沿著表面移動。
如果碰撞面是2個,則sc的維數是2,以此類推,當有nc個碰撞面作用時,sc的維數是nc。復雜的沖擊會導致表面發生一系列碰撞,為了方便分析,在接下來的交互分析中忽略這種影響。
求解沖擊動力學問題。在沖擊區間上對約束運動模型進行積分,令t1為碰撞發生的時刻,t2為沖擊結束的時刻,則發生碰撞的時間間隔為Δt=[t1,t2]。對幾何約束和非彈性沖擊來說,可以認為這個區間很短,即當Δt→0,t2→t1,在此區間內對公式(10)進行積分,如公式(21)所示。
公式(21)、公式(22)描述了沖擊的動態過程。它們是6+nc個標量方程的集合,可以求解和FΔt,為六分量關節速度變化量;FΔt為nc個分量的沖量,當Δt→0時,FΔt≠0,即F→∞。在無限短的撞擊時間內,位置不會改變,即q1=q2。
基于碰撞過程發生的3個階段,采用數值方法求解具體碰撞任務的一般過程。在接近階段,對公式(3)進行積分,并檢驗sc的坐標值;當sc坐標值變為0時,轉向沖擊公式(21)、公式(22)并計算速度變化量。利用這個新的初始狀態,對公式(10)和公式(14)積分來求解約束運動的動力學方程。綜上所述,當sc為0時,接近階段結束,在那個瞬間碰撞時間間隔非常短,隨后開始較規律的受限運動。
2 仿真分析
建立由4個Mecanum輪構成的全向移動平臺和1個由六自由度操作臂組成的MMR仿真模型來驗證本文采用的交互作用分析方法的有效性。機器人的設計參數[4]見表1。對臂-環境的交互作用進行仿真,時間間隔設為t∈[0,2] s,地面傾斜角θm、側傾角γm設為0°。

表1 機器人的設計參數
本文以典型的有摩擦接觸任務-寫字任務來分析臂-環境交互作用。為了簡化計算,將小車固定,控制操作臂寫漢字“一”,如圖2所示。寫字任務從A位置開始,在接近階段由PD調節器控制機器人。

圖2 六自由度操作臂執行有摩擦的接觸任務
機器人從A到B的運動結果如圖3所示,即坐標x、y和z隨時間的變化以及其速度隨時間的變化。通過分析,得到如下結論,預期的非零速接觸是合理的,當參考軌跡沒有碰撞時,機器人末端到達表面的速度不為0,如圖3(e)所示。
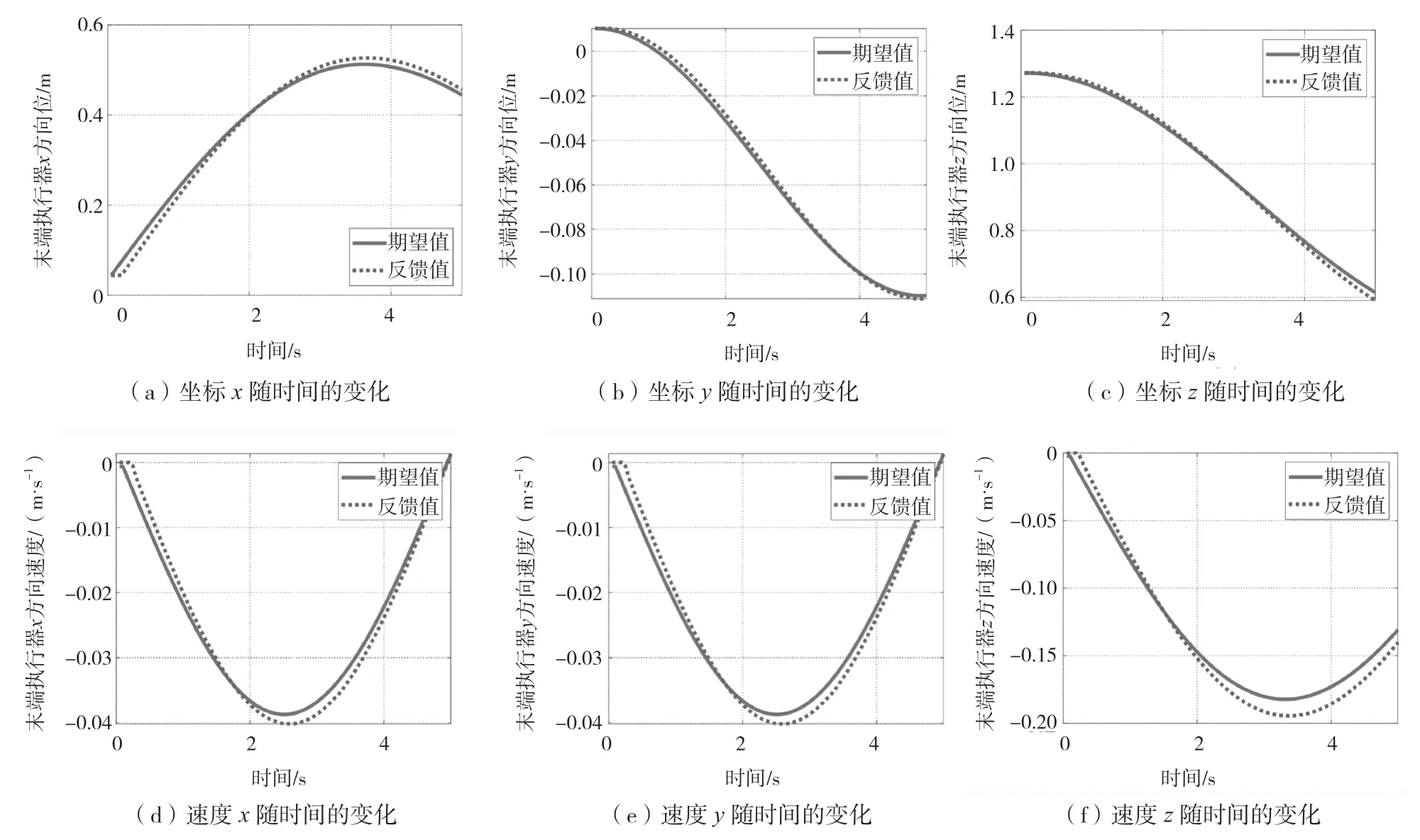
圖3 臂-環境交互:接近階段
沖擊階段各關節瞬時速度的變化曲線如圖4所示,沖擊時間為5 s。撞擊后會發生堵塞,速度降至0。
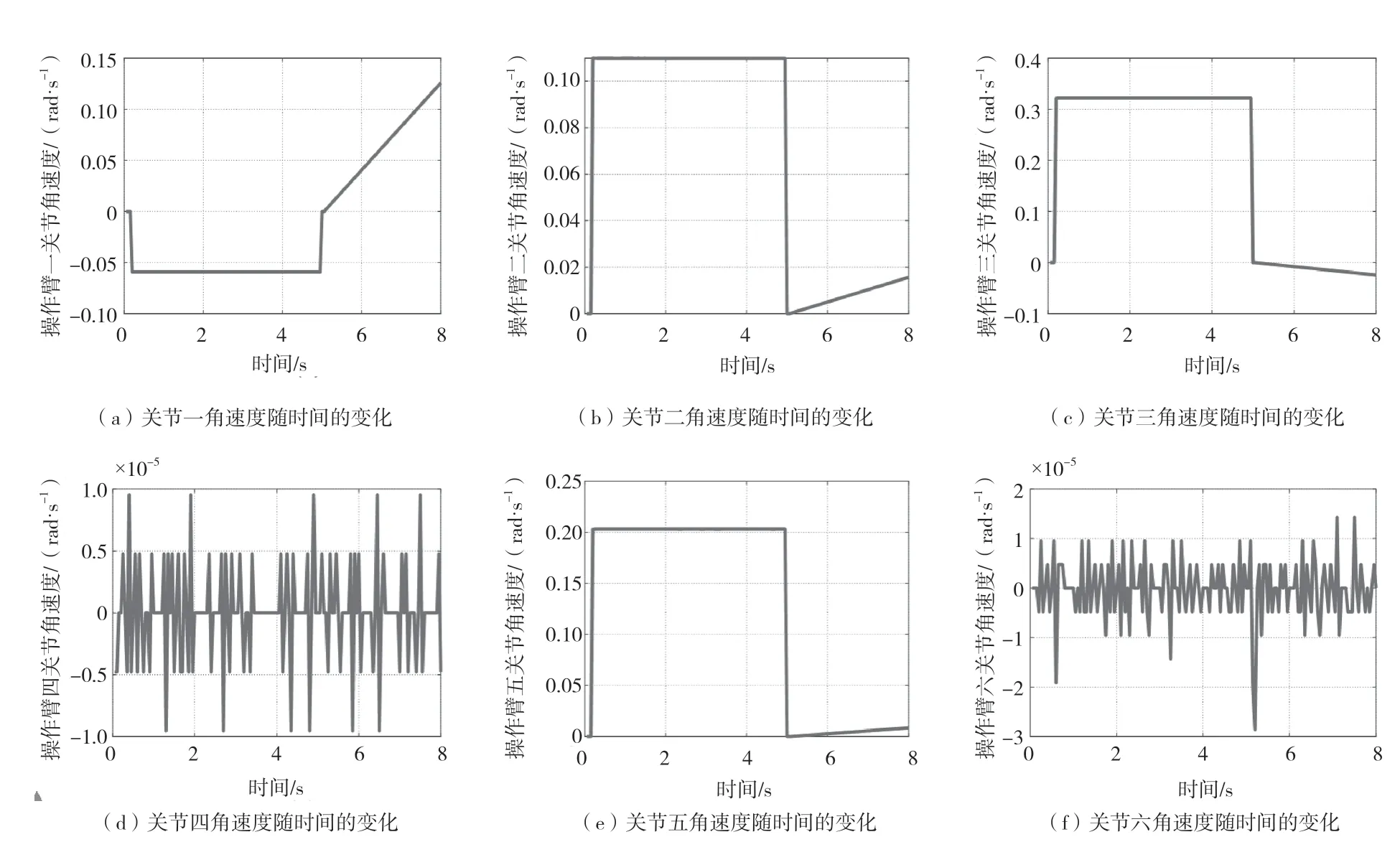
圖4 臂-環境交互:沖擊階段
采用經典的力/位混合控制實現約束運動。操作臂x向位置和速度曲線隨時間的變化如圖5所示。可能會看到機器人的尖端停止在C位置,但是不會立即開始往回移動,這是因為發生了“堵塞”(實則為接觸運動的黏著階段),所以堵塞周期約0.05 s。之后,機器人的末端運動指向B。
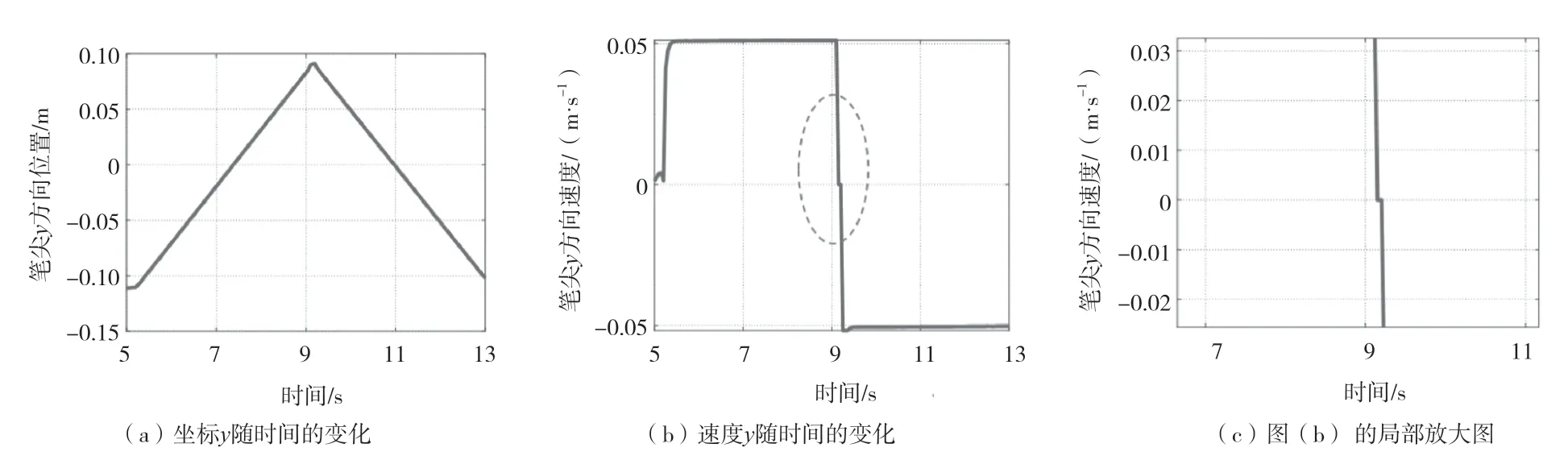
圖5 臂-環境交互:受限運動階段
反作用力F和摩擦力Ff的摩擦力方向在點C發生了變化,但是沒有立即變化,如圖6(c)所示。在阻塞過程中,摩擦力上升,當它達到μF值時,操作臂末端再次開始運動。反作用力F會有波動,這是因為實際機器人并不是純剛體。
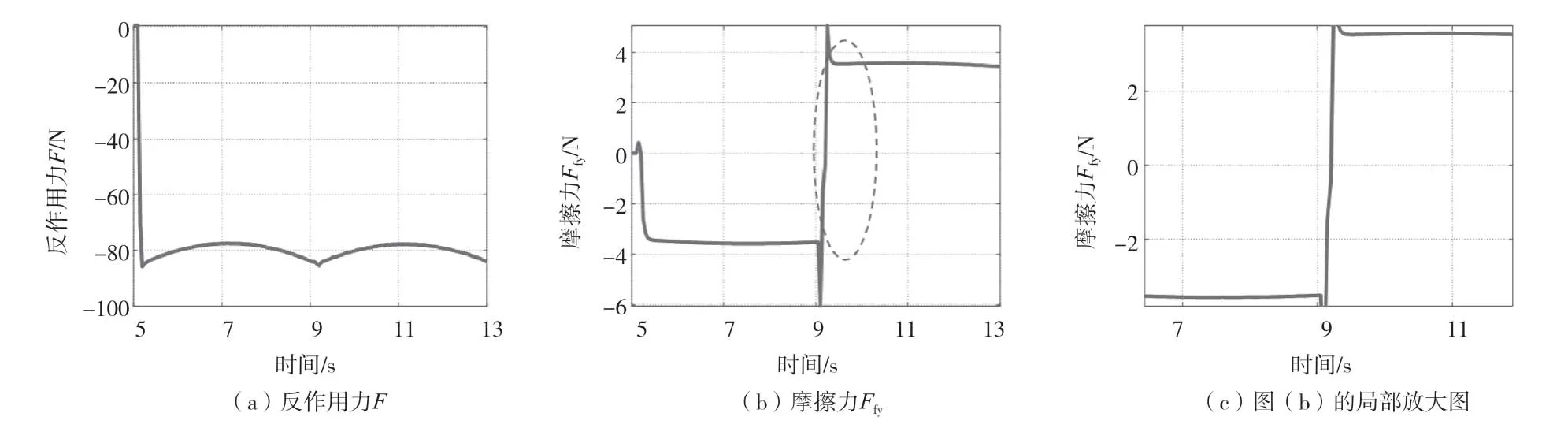
圖6 臂-環境交互:接觸點的力
3 結論
本文基于拉格朗日方程推導了在接近、沖擊和受限運動3個階段的機器人-環境交互作用模型,并對其進行了仿真分析。仿真結果驗證了交互作用模型的合理性和有效性,為建立完整的移動作業機器人動力學模型提供依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
光學精密工程(2016年6期)2016-11-07 09:07:19