面向水下目標探測的海洋機器人追蹤控制策略
2024-05-07 02:48:44耿成園馮強強張會寅趙振強吳澤彬
中國新技術(shù)新產(chǎn)品 2024年6期
關(guān)鍵詞:控制策略
耿成園 馮強強 張會寅 趙振強 吳澤彬
(中國地質(zhì)調(diào)查局廣州海洋地質(zhì)調(diào)查局,廣東 廣州 511458)
自主水下機器人(Autonomous Underwater Vehicle,AUV)具有較高的智能化水平,能夠利用自身集成化的功能模組進行自主運動控制以及智能化決策,其中導航系統(tǒng)是水下機器人的重要組成部分,通過融合多傳感器的硬件精準探測水下目標。本文針對多傳感器的水下機器人的追蹤控制系統(tǒng)進行設計,并對系統(tǒng)性能進行模擬分析。
1 水下機器人追蹤控制系統(tǒng)設計
追蹤控制系統(tǒng)主要由2個可獨立操控的模組構(gòu)成,第一模組為履帶式行進機器人,并配置動力驅(qū)動裝置,能夠在水中進行上下移動以及水平面平移;第二模組為水下操縱檢測裝置,進行實時參數(shù)最優(yōu)化控制,2個模組都可以在水面上方通過操作人員直接進行操作控制。由于2個模組是由模塊化的功能單元進行封裝,因此其可以根據(jù)需求參數(shù)自定義配置功能,并可以同履帶式機人共同進行耦合操作。所有機器人模組共同連接至控制面板中,通過控制面板來提供圖像流集成,集成全過程信息參數(shù)。
2 水下機器人追蹤控制系統(tǒng)的設計
2.1 水下機器人追蹤控制系統(tǒng)的框架
2.2 傳感器采集模塊設計
傳感器的數(shù)據(jù)參數(shù)采集是實現(xiàn)機器人運動以及姿態(tài)調(diào)整的重要控制依據(jù),為了更好地適應水下的運行環(huán)境并提升采集效率,在參數(shù)配置上,使用傳感器對機器運行姿態(tài)、室外溫度、密封艙溫度以及實時GPS數(shù)據(jù)進行采集[2]。傳感器采集模塊功能如圖1所示。
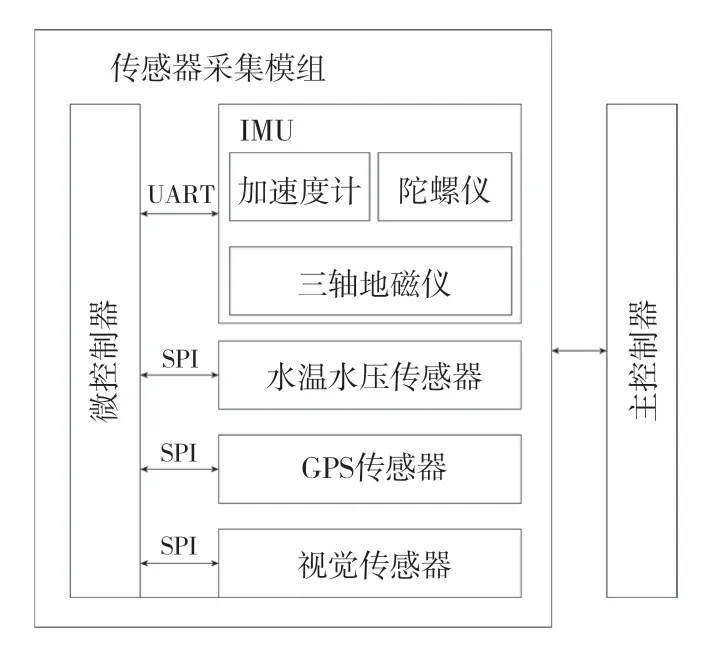
圖1 傳感器采集模塊功能示意圖
2.3 主控制器設計
水下機器人系統(tǒng)有5個模塊,包括微控制單元、直流電機(無刷)、電壓測試和通信裝置等。主要控制MCU為STM32F4芯片,其核心為ARM Cortex-M4,峰值頻率為168 MHz,在通信傳輸?shù)倪^程中,支持UATR、SPI等多種數(shù)據(jù)輸出端口,同時配置外部定時裝置以及模擬數(shù)字轉(zhuǎn)換器(Analogtodigital converter,ADC)等。主MCU通過可編程邏輯控制器(Programmable Logic Controller,PLC)來實時獲取外部參照命令,穩(wěn)定傳輸運動狀態(tài)的信息,其主控制器模塊功能如圖2所示。
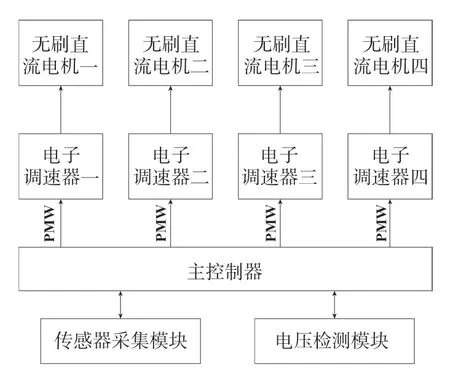
圖2 主控制器模塊功能示意圖
3 模型建立與描述
水下機器人在海洋環(huán)境中的運行規(guī)律十分復雜,因此需要將機器人的整體運動分為垂直運動和水平運動2個方向,以便進行研究[3]。本文基于機器人的水平和垂直運動需求來建立三維坐標系。在水平面的運行中,受到慣性作用以及控制飽和度的影響,實際的系統(tǒng)輸出參數(shù)τc往往達不到理論的控制要求,因此τ的具體表達原理如公式(1)所示。
式中:為能夠輸出的最大輸出量;為能夠輸出的最小輸出量。但是水下環(huán)境較為復雜,其動力參數(shù)的變化往往是無序的,這會對機器人的實際控制效果產(chǎn)生影響,因此需要重點降低控制器的魯棒性。其原理的變化形式如公式(2)所示。
式中:M為系統(tǒng)整體的慣性矩陣;ΔM為機器人在慣性矩陣變化的過程中產(chǎn)生的誤差,ΔM∈R3×3;v為v的導數(shù);C(v)為向心力矩陣;ΔC為機器人在向心力矩陣中產(chǎn)生的誤差,ΔC∈R3×3;v為橫向方向的偏移速度;ΔD為機器人在前進動力時所產(chǎn)生的誤差,ΔD∈R3×3。D(v,v)為阻尼矩陣;G(P) 為恢復力矩陣;τ為自由度矩陣;f為參數(shù)設計中的自由度干擾項。
4 追蹤控制策略與實現(xiàn)步驟
4.1 追蹤控制策略
追蹤控制的前提是對水下結(jié)構(gòu)及其周邊的障礙物進行全面掃描,為了更精確地記錄障礙物的尺寸,需要實時識別設備到表面的距離以及機器人的實際運行狀態(tài),使機器人能夠在垂直方向上移動。其移動的激光光點實時展示在相機的傳感器中,4束激光圍繞著相機構(gòu)建a×b的矩形。控制光束直接平行于光軸并且以對稱的形式按照矩形矩陣進行排列,而為了保證控制策略的精確度,同時引入冗余的第四激光束作為異常點的檢測光束,進而保證控制的穩(wěn)定性和有效性。
4.2 實現(xiàn)步驟
4.2.1 基陣結(jié)構(gòu)
追蹤控制需要準確評估目標的方位角和仰角,在追蹤識別中,十字陣具有陣列冗余度小的特點[4],因此采用十字陣作為接收基陣。在每個器陣中,間距為半個波長。
紙漿洗滌過程,其操作優(yōu)化的核心思想是:在不增加額外生產(chǎn)設備和不改變現(xiàn)有工藝流程的前提下,優(yōu)化紙漿洗滌質(zhì)量,提高洗后出漿量,降低洗滌水用量;以提高綜合經(jīng)濟效益為目標,通過實時監(jiān)測紙漿洗滌過程的狀態(tài)信息,當條件參數(shù)和狀態(tài)參數(shù)發(fā)生改變時,對關(guān)鍵操作參數(shù)進行及時、合理的調(diào)節(jié),從而使整個紙漿洗滌過程處在優(yōu)化的運行狀態(tài)。
4.2.2 信號接收
需要對每個換能器采集的數(shù)據(jù)進行數(shù)模轉(zhuǎn)換,其采樣率控制在20 kHz~50 kHz,還要約束增益控制,并以基于A/D數(shù)據(jù)轉(zhuǎn)換的形式讀取數(shù)據(jù)[5]。本文采用RISC 微處理器(Advanced RISC Machine,ARM)處理數(shù)據(jù),讀取后的數(shù)據(jù)直接存入端口數(shù)據(jù)庫中。
4.2.3 信號處理
在接收信號后,需要迅速處理信號。其主要針對數(shù)字濾波、FFT以及距離估計進行模型識別,在這個過程中,波束運算量最大,因此在保證計算精度的基礎上,其運算量會顯著增加[6]。
4.2.4 主動測距
完成信號處理后,還需要通過脈沖法測量脈沖被目標反射后的時間周期,進而判斷距離。在測距過程中,通過估計方位判斷準確方向,進而沿著計算方向發(fā)出射聲脈沖,主動測量距離。
4.2.5 結(jié)果顯示與輸出
測距計算結(jié)果通過顯示裝置進行可視化展示,還需要建立對應的數(shù)據(jù)輸出端口,可以采用RS232或485傳輸端口數(shù)據(jù)。
5 仿真試驗與結(jié)果分析
5.1 測距定位誤差源分析
本文通過MATLAB軟件求解水下機器人的追蹤控制策略,并使用軟件中自帶的優(yōu)化工具解算測定距離。為了提升距離測定的計算精度,需要分析影響測距結(jié)果的誤差要素,本文以國家《海道測量規(guī)范》中的參數(shù)要求作為測量要求。在模擬測量的過程中,海水分層會對求解的平均速度產(chǎn)生誤差影響,由于速度主要是由壓力引起的,因此可以加大深海中的分層層級。平均聲速水層分割參數(shù)見表1。
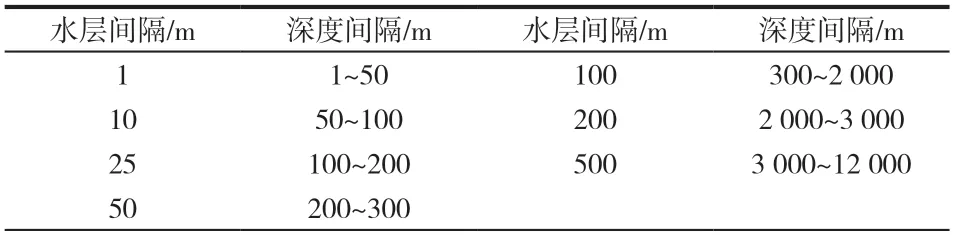
表1 平均聲速水層分割參數(shù)表
在初始模型設定中,縱向的初始速度為1 m/s,橫向的初始速度為0.02 m/s,朝向角度為任意設置,縱向的速度偏差為±0.015 m/s,橫向的速度偏差為±0.005 m/s,速度噪聲類型為白噪聲,其參數(shù)分布符合高斯分布。
5.2 測距定位誤差源分析
采用“平均聲速法”求解聲學距離,假設測距誤差為2‰,當設備下潛至水下5 000 m時,其測距誤差為10 m,下潛后導航仿真誤差值分布如圖3所示。在定深運動的過程中,其初始艏向角為30°,總航程為860.32 m,最大導航誤差為25.41 m。整個過程的運動仿真符合閉合式矩形運動航位算法的誤差分布要求。
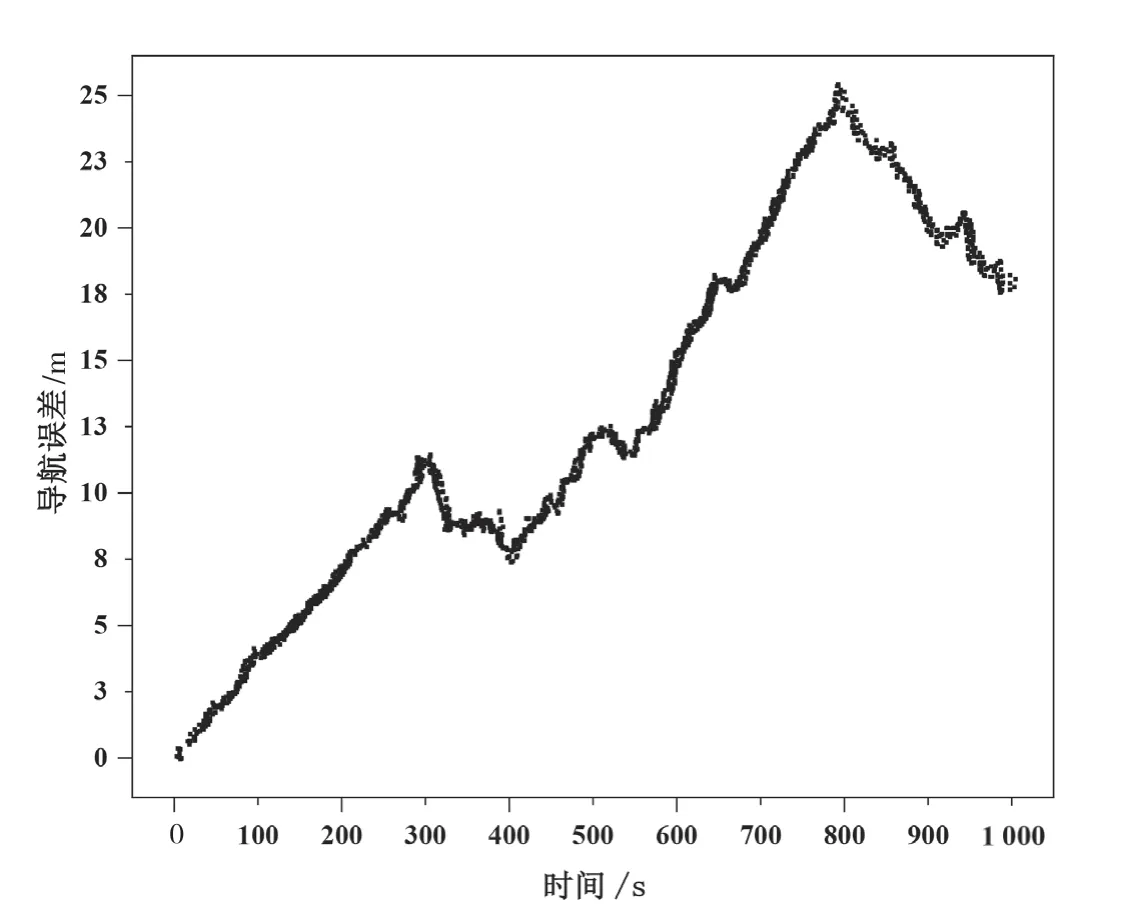
圖3 導航誤差仿真結(jié)果
5.3 入射角度水平誤差值分析
不同入射角度的水平誤差分析也是判斷機器人穩(wěn)定性的關(guān)鍵性參數(shù),其中聲速初始值設為1 200 m /s,水深為5 000 m,在不同初設入射角度下,聲線折射引起的水平誤差偏移分布如圖4所示。
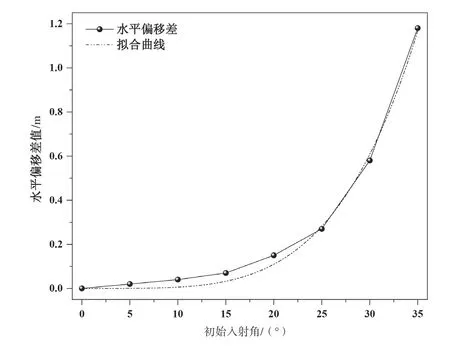
圖4 不同入射角度的水平誤差偏移分布值
從圖4能夠看出,隨著初始角度數(shù)值不斷增大,其水平偏移量也逐漸增加。在進行水下模擬試驗的過程中,多數(shù)采用“閉合路徑”運動方式并且其入射角與水平偏移量之間存在顯著的曲線關(guān)系。通過自身的對稱性來降低導航的誤差,進而提升導航的精度。其中AUV的直線航程距離為836.92 m,最大程度降低了導航誤差,穩(wěn)定控制AUV。
6 結(jié)論
本文結(jié)合水下環(huán)境的要求,提出了一種AUV的模塊化功能實現(xiàn)方法,并在MATLAB軟件中搭建了仿真模型。結(jié)果表明,通過融合多傳感器的硬件導航精準識別水下目標,其追蹤控制策略保證機器人穩(wěn)定運行,根據(jù)參數(shù)化仿真實現(xiàn)了機器人的自主運動控制和智能化決策。
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36