改進Alexnet網絡的滾動軸承故障診斷方法
2024-05-07 02:48:44王超群趙雅婷
中國新技術新產品 2024年6期
韓 龍 王超群 姜 楠 趙雅婷
(黑龍江科技大學電氣與控制工程學院,黑龍江 哈爾濱 150022)
滾動軸承是旋轉機械最常見的組成部分之一,也是最容易發生機械故障的零件。根據統計數據,約30%的旋轉機械故障是由軸承引起的[1]。由于復雜的工作環境和交替荷載,軸承很容易受到損壞,因此,診斷滾動軸承的故障對提高電機的可靠性和安全性來說至關重要。
振動信號能夠很好地反映軸承的運行狀態[2]。劉洋等[3]采用α分布提取信號特征,應用I-ELM網絡診斷軸承故障模式;趙見龍等[4]使用共振稀疏分解提取滾動軸承故障特征,再使用粒子群優化算法進行故障診斷。張玉芝[5]使用邁耶小波(Meyer Wavelet)提取振動信號特征,使用深度森林算法進行分類識別,識別正確率大于70% 。張文風等[6]在CNN網絡上增加Droupout層,自適應提取滾動軸承故障類型的特征。
與CNN網絡相比,結構更復雜的Alexnet網絡具有更強的學習能力,因此在滾動軸承故障診斷中成為重要的工具。然而,Alexnet網絡本身的識別精度存在一定限制。為了解決Alexnet網絡的問題,本文提出了一種改進Alexnet網絡的方法,并將這個方法應用于滾動軸承故障診斷,以提高診斷精度。
1 Alexnet網絡結構
Alexnet網絡卷積層結構如下。第一層48個卷積核,尺寸為3 ppi×11 ppi×11 ppi;第二層128個卷積核,尺寸為5 ppi×5 ppi×48 ppi;第三層192個卷積核,尺寸為3 ppi×3 ppi×256 ppi;第四層192個卷積核,尺寸為3 ppi×3 ppi×192 ppi;第五層256個卷積核,尺寸為3 ppi×3 ppi×192 ppi。除了卷積層外,Alexnet網絡還包括降維傳遞圖像特征的池化層和用來輸出圖像特征去分類器的全連接層。Alexnet網絡結構如圖1所示。
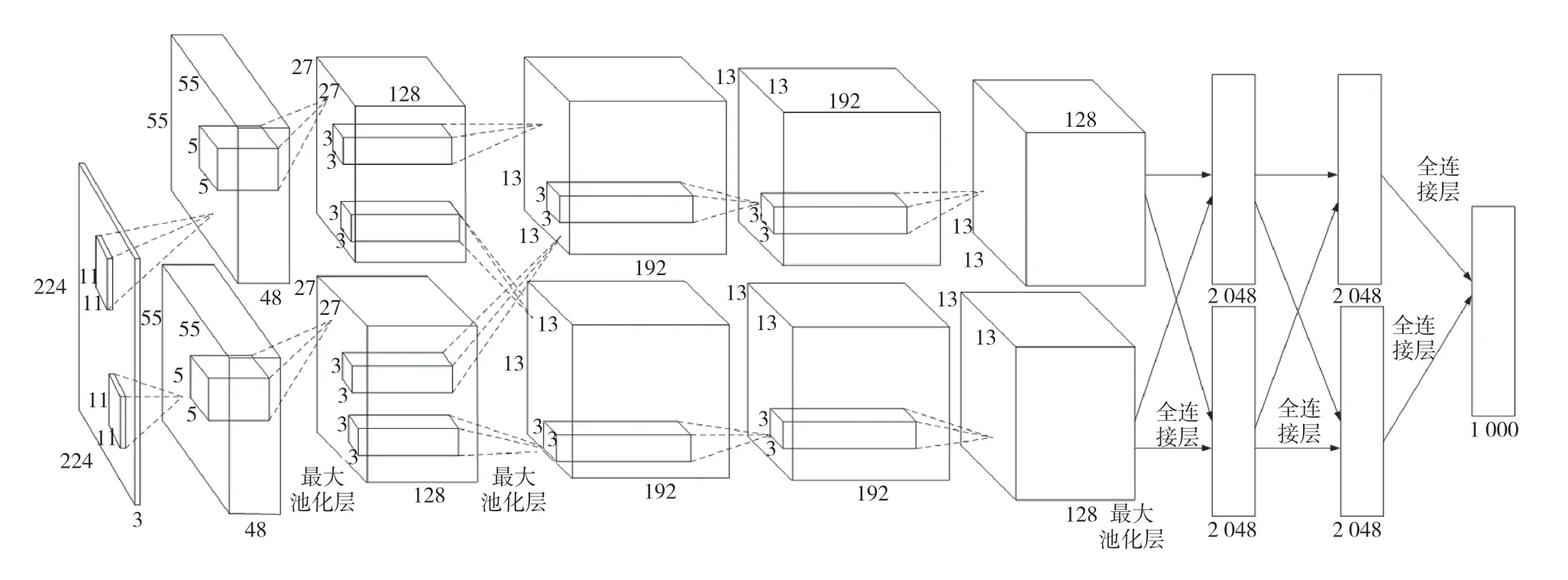
圖1 Alexnet網絡結構示意圖(單位:ppi)
2 改進Alexnet網絡
2.1 激活函數
激活函數在神經網絡中的關鍵作用是引入非線性,使網絡能夠更好地學習和適應數據中的復雜模式。與標準的修正線性單元(Rectified Linear Unit,ReLU)激活函數相比,高斯誤差線性單元(Gaussian Error Linear Unit,GELU)激活函數經過專門改進,旨在優化神經網絡的訓練過程,提高識別精度。GELU激活函數和ReLU激活函數如公式(1)、公式(2)所示。
式中:x為輸入激活函數的值。
兩者函數圖像對比如圖2所示。
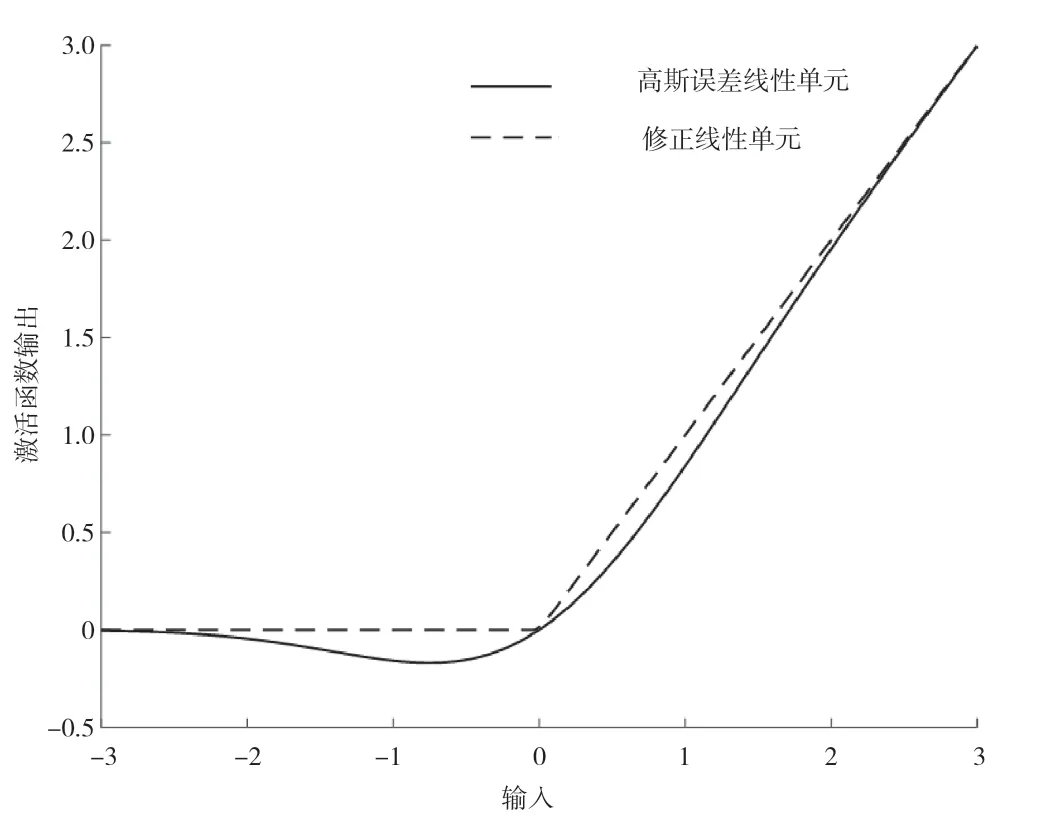
圖2 GELU激活函數圖像與ReLU激活函數圖像對比
將公式(1)、公式(2)以及圖2進行對比可知,公式(2) 激活函數在零點附近有更平滑的曲線,與ReLU激活函數相比,它能夠更緩慢地接近0,這說明在訓練過程中,梯度的變化更平滑。當輸入接近0時,GeLU激活函數表現對稱性。因為圖像結構通常是對稱的,所以當處理圖像等二維數據時,這種對稱性尤為重要,GeLU激活函數在提高識別精度方面效果明顯。
2.2 批量歸一化
批量歸一化(Batch Normalization,BN)是深度學習中的一種預處理方法,旨在提高訓練效率和網絡穩定性。采用BN計算均值和方差,將數據進行歸一化處理,并引入可學習參數來修正數據。它的主要優勢有加快訓練速度、提高網絡穩定性以及抑制過擬合。BN已成為深度學習中的常用技術之一,廣泛應用于各種神經網絡架構。其計算過程如下。
設一個數量為n的批量A:A={x1,x2,x3,x4......xn},在網絡訓練的過程中,μ、σ分別為各批量的均值和方差,計算數據集的均值和方差,如公式(3)、公式(4)所示。
式中:μA為批量A的均值;xn為批量A中的第n個量;為整個數據集合的方差。
對數據進行歸一化處理,如公式(5)所示。
式中:為歸一化后的特征;ε為常系數,其作用是增加數據的穩定性;為數據集的均值。
在數據進行歸一化處理的基礎上,引入可拉伸參數γ和偏移參數β,進行修正處理,如公式(6)所示。
式中:BNγ·β(xn)為批量歸一化操作;γ與β2個參數會隨著訓練中的權重一起更新,最后輸出歸一化的值yi。
本文在Alexnet網絡中的卷積層和線性層后添加BN層來歸一化處理激活后的特征,減少輸出的數據在層間傳播中的影響,加速網絡訓練和收斂,防止在梯度彌散和抑制訓練過程中出現過擬合現象。改進后的Alexnet網絡如圖3所示。
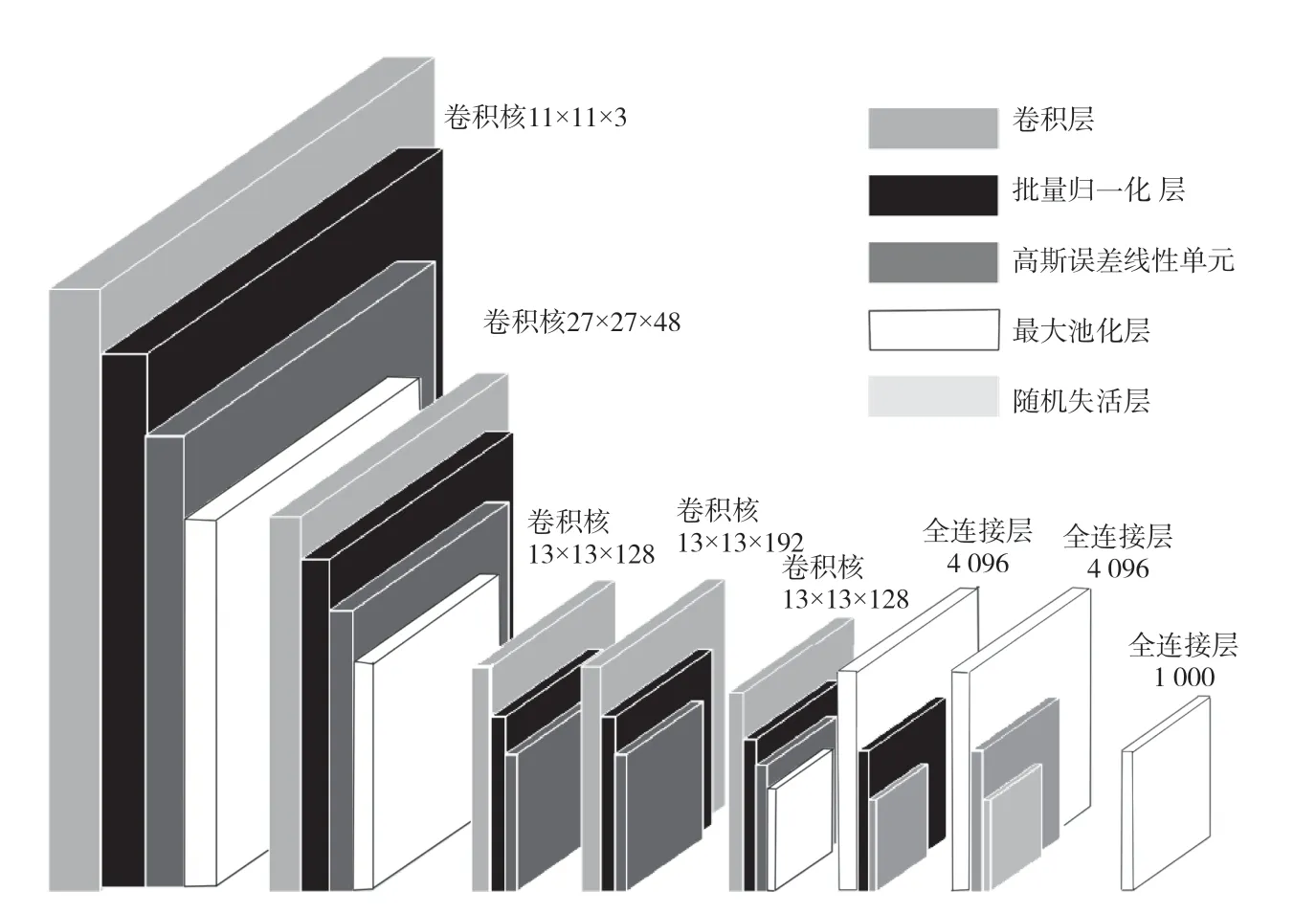
圖3 改進后的Alexnet網絡結構(單位:ppi)
3 試驗與分析
3.1 數據集介紹
以凱斯西儲大學(Case Western Reserve University,CWRU)的滾動軸承振動加速度數據集作為試驗的數據集,這次試驗使用1ps,轉速為1 772 r/min,標簽、滾動軸承的損傷情況以及訓練集、測試集和驗證集的劃分見表1。
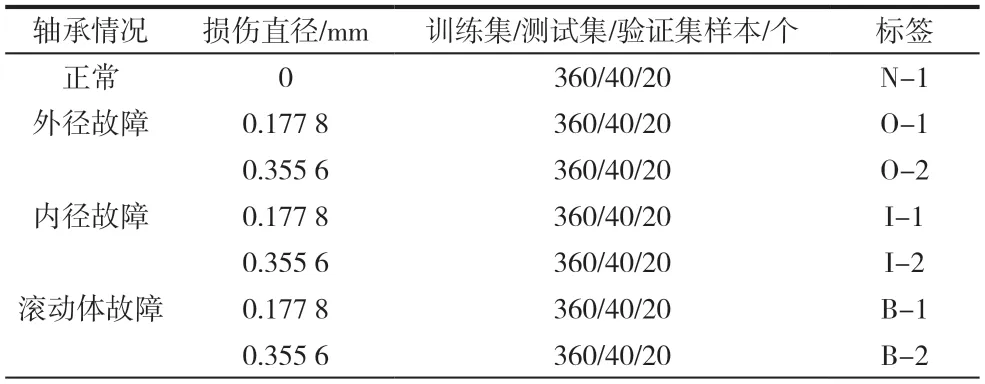
表1 CWRU試驗數據
3.2 試驗過程
本試驗使用的編譯器和解釋器為PyCharm,深度學習框架為PyTorch 1.11.1,操作系統為Windows 10,系統處理器為Intel(R) Core(TM)i5-7300HQ CPU,圖形處理器為 NVIDIA GTX 1050。訓練參數batch_sie設為16,訓練輪數為50個epoch,每次epoch的迭代次數為100,訓練的學習率優化器為Adam,初始學習率為0.000 01。每個epoch的loss值保存在loss.txt文件中,用來分析在訓練過程中的loss變化。
筆者采用短時傅里葉變換(Short Time Fourier Transform,STFT)構建訓練網絡使用的二維時頻圖像數據集。4種不同運行情況下的STFT圖像如圖4所示。從圖4中可以看出,在4種不同運行狀態下,STFT圖像的白色部分分布均有差異。內徑故障頻率主要集中在高頻區域,滾動體故障的頻率波動分布比較均勻。
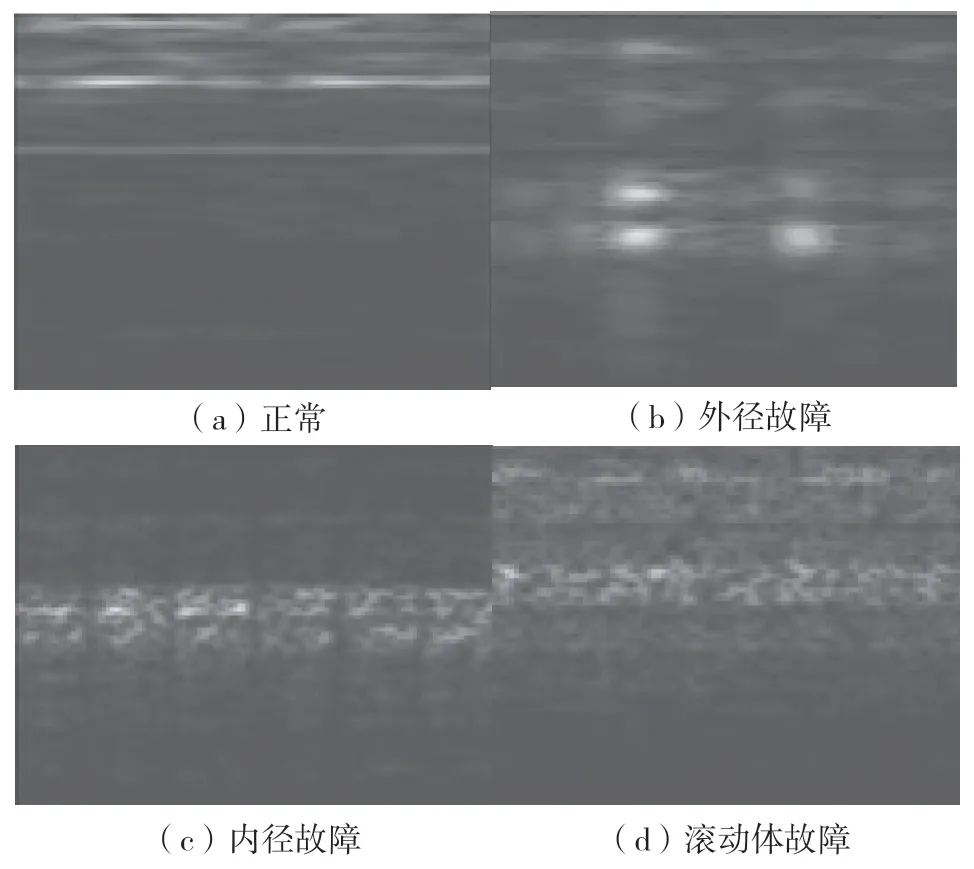
圖4 4種不同運行情況的STFT圖像
3.3 結果分析
在訓練過程中的loss隨迭代周期變化的曲線如圖5所示。當迭代周期次數為約25時,改進后的Alexnet網絡的loss曲線趨于平穩;當迭代周期次數為約30時,Alexnet模型趨于平穩。從圖5中可以看出,試驗結果證明改進Alexnet網絡的loss的收斂速度明顯快于原網絡且在迭代周期中的loss值也低于Alexnet網絡。
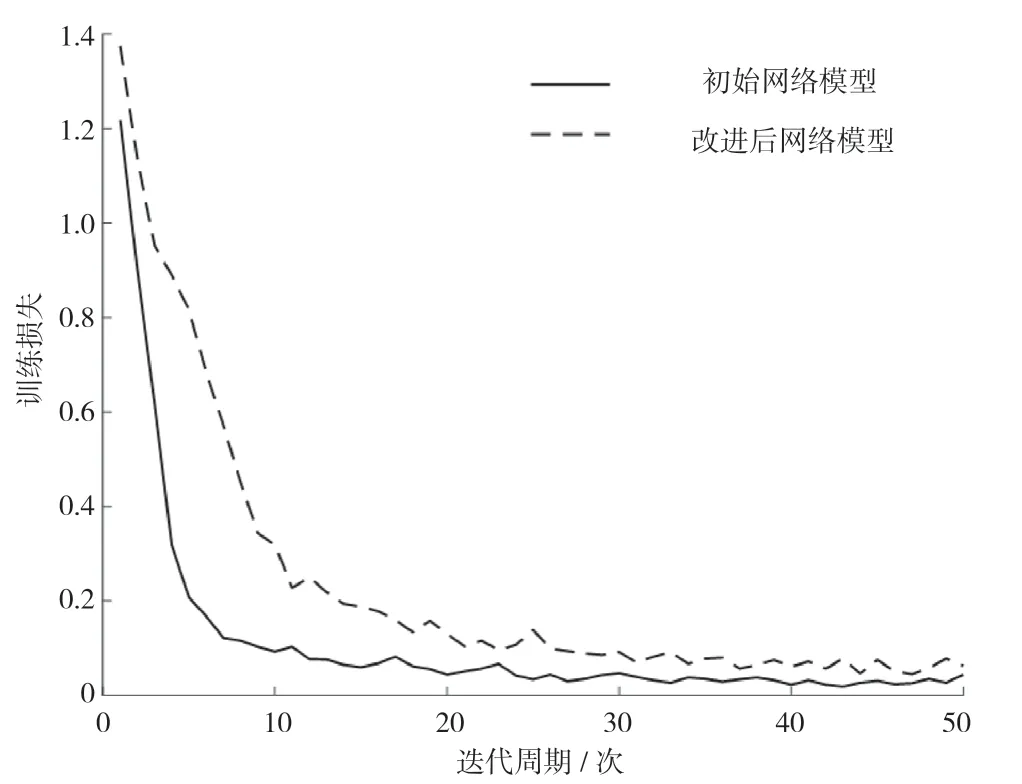
圖5 loss隨迭代周期變化的曲線
為了驗證改進后的Alexnet網絡識別準確率以及防止偶然性誤差,本次試驗取10次預測結果的平均值作為預測結果(見表2)。對比改進前和改進后的Alexnet網絡在不同損傷情況下的性能表現,改進后的網絡在正常狀態下具有更高的準確性(99.55%)。在滾動體、外徑和內徑不同損傷的故障情況下,改進后的Alexnet網絡分別提高至99.72%(B-1)和99.77%(B-2),99.62%(O-1)和99.88%(O-2),99.49%(I-1)和99.99%(I-2),明顯優于Alexnet網絡。綜上所述,改進后的Alexnet在各種損傷情況下都展現顯著提高的性能,體現出該改進方案的可靠性和準確性。
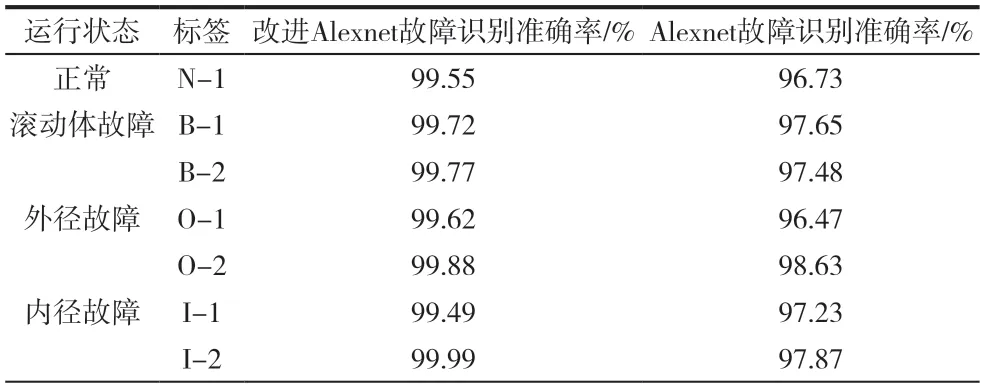
表2 2種網絡的故障識別準確率
3.4 模擬滾動軸承故障試驗
實驗平臺采用滾動軸承的型號為HRB NU2206EM,其具體參數見表3。

表3 故障軸承的主要技術參數
采用電火花線切割機加工工藝模擬軸承故障,內徑故障和滾動體故障線切直徑均為1 mm,驅動電機轉速為1 700 r/min,信號采樣率為500 ksps。
3.5 試驗結果與分析
在滾動軸承故障試驗平臺上采集的軸承振動信號采用與CWRU數據集相同的處理方法制作二維圖像數據集,其試驗數據見表4。

表4 模擬試驗臺試驗數據
改進Alexnet網絡、Alexnet網絡、SVM和CNN網絡進行訓練后,故障識別準確率見表5。表5中數據顯示,改進Alexnet網絡的識別準確率為97.22%,高于Alexnet網絡、SVM和CNN網絡的識別準確率。

表5 不同網絡的故障識別準確率
4 結論
本文提出了一種基于改進后的Alexnet網絡的滾動軸承故障識別方法,采用STFT將一維振動信號轉換為二維圖像并應用改進Alexnet網絡進行故障診斷,經過試驗,得出以下結論。1)通過引入GeLU激活函數和BN層,Alexnet網絡在訓練穩定性、特征學習、收斂速度和識別精度方面均有顯著優勢,訓練過程加快,模型在圖像分類任務中的準確性提高。2)改進的Alexnet網絡應用在模擬滾動軸承故障實驗平臺,通過對比Alexnet網絡、SVM和CNN網絡,改進的Alexnet網絡的故障診斷準確率最高,達到97.25%,驗證了該方法的有效性。
猜你喜歡
裝備制造技術(2020年3期)2020-12-25 05:22:30
汽車維修與保養(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21