基于 ZYNQ 的磁懸浮織針陣列控制系統設計
2024-05-24 11:30:50王意劉越彭益李明周向陽張成俊
紡織工程學報 2024年2期
王意 劉越 彭益 李明 周向陽 張成俊
摘要:為了滿足磁懸浮織針陣列系統在多路織針實時、高速控制方面的需求,基于單針磁懸浮織針控制的研究,利用PL(FPGA)和PS(ARM)等ZYNQ芯片內部資源的靈活邏輯可操作性,設計了硬件邏輯相關的各功能模塊。同時,通過AXI總線協議設計了驅動功能IP核,從而保證了PL端與PS端的高效協同工作,實現了對多路織針的實時、高速控制。還借助Vivado軟件進行了硬件邏輯的編程和仿真,并搭建了樣機試驗平臺對完整系統進行了測試。實驗結果表明:該系統能夠對多路磁懸浮織針進行同步、高速和穩定的控制,驗證了該系統的有效性和可行性。
關鍵詞:磁懸浮;織針陣列;運動控制;ZYNQ;硬件邏輯
中圖分類號:TS183.92 ???文獻標志碼:A ??文章編號:2097-2911-(2024)02-0073-11
Design of control system for magnetic levitation needle arraybased on ZYNQ
WANG Yia,LIU Yuea,PENG Yia,LIMinga,ZHOU Xiangyangab,ZHANG Chengjunab*
(a.School of Mechanical Engineering and Automation;b.Hubei Digital Textile Equipment Key Laboratory, Wuhan TextileUniversity, Wuhan 430073, China)
Abstract: In order to meet the demand for real-time, high-speed control of multiple knitting needles in the magnetic levitation needle array system, based on the study of single-needle magnetic levitation needle control, utilizes the flexible logic operability of the internal resources of the ZYNQ chips, such as the PL (FPGA) and the PS (ARM), and designs the functional modules related to the hardware logic. At the same time, the driver function IP core is designed through the AXI bus protocol, which ensures the efficient cooperative work between the PL side and the PS side, and realizes the real-time and high-speed control of multiple knitting needles. It is programmed and simulated the hardware logic with the help of Vivado software, and built a prototype test platform to test the complete system. The experimental results show that the system is capable of synchronized, high-speed and stable control of multi-way magnetic levitation knitting needles, which verifies the effectiveness and feasibility of the system.
Keywords: magnetic suspension; needle array; motion control; ZYNQ; hardware logic
傳統橫機控制系統通常采用PC機搭配單片機或多單片機的方式。然而,隨著橫機結構和編織工藝要求的不斷提高,系統所處理的數據量和任務量也大大增加,這使得傳統控制系統難以滿足實時傳輸和并行處理的需求。為了提高控制系統對復雜數據的處理性能和實時處理速度,業內專家們提出了各種不同的高性能處理器與下位機組合的方式。比如,呂建飛等[1]設計了基于 ARM 和單片機的全自動橫機控制系統,采用 ARM作為中央控制,通過并行總線將編織數據發送給單片機,由單片機控制各執行機構。汝吉東等[2]設計了ARM9和CPLD的高速橫機控制系統,利用ARM9作為主控模塊,通過GPIO模擬總線連接兩片 CPLD作為協處理器,由 CPLD負責各部件機構的控制。顧涵等[3]設計了基于ARM 和 FPGA 的電腦橫機織針控制系統,通過 ARM 和 FPGA 的組合,由ARM 將花型編譯數據通過并行總線傳輸給下位機FPGA[4],然后由FPGA控制織針的驅動。這些不同的系統相較于傳統橫機控制系統具有并行控制、可擴展性強、運算性能強等優點。然而,這種架構需要復雜的底層硬件,并且ARM與單片機、CPLD、FPGA之間的數據傳輸緩慢、不穩定,因此不適用于磁懸浮織針陣列控制這種對實時性要求較高的場景。
織針驅動技術作為針織設備的核心,其驅動性能直接關系到織物的質量。傳統的電腦橫機與電腦提花圓機是針織設備中比較具有代表性的設備,1971年,意大利 PROTTI 公司研制出世界上第一臺電腦橫機。隨著電子、計算機的高速發展,1990年邁耶西公司研發的電腦圓機在針織機械展會上進行展出,隨后各先進制造商相繼推出新型針織設備[5]。針織設備性能的改善也是國外學者的主要研究方向,如德國 Groz-Beckert公司為解決發熱、能量損耗問題,設計一種高性能圓機織針(Litespeed)[6],通過改變織針的結構,減少織針整體重量與摩擦的面積。德國 Mayer & Cie公司研發無舌織針,從織針的結構上進行改善,以此降低織針與構件的磨損,增加織針使用壽命[7]。
本文研究了一種基于ZYNQ的磁懸浮織針陣列控制系統,利用該產品將高性能ARM Cor- tex-A9系列處理器與 FPGA 緊密結合在芯片內[8],降低了硬件的開發難度,并實現了高帶寬、低延遲的ARM與FPGA片內總線通信[9],同時通過無接觸驅動的方法降低織針驅動系統的能耗,實現多工位編織工藝,解決傳統的織針針踵與三角凸輪接觸傳動來驅動織針軸向運動的方式會產生摩擦發熱和振動等問題。與現有研究相比,本文將測量裝置、磁懸浮織針結構和ZYNQ硬件邏輯系統三者相結合,構成閉環控制系統,能夠更好實現磁懸浮織針的精準控制。為實現高速、實時、并行的磁懸浮織針陣列控制,設計了一種基于ZYNQ的磁懸浮織針陣列控制系統,利用高性能的處理系統(PS)部分來靈活分配ZYNQ高速并行的FPGA部分(PL)的片內資源,以實現對磁懸浮織針陣列的線性控制。通過仿真軟件對系統功能進行了驗證,并基于 Xilinx 的開發板 XC7Z010進行了功能性驗證。
1磁懸浮織針陣列驅動結構
磁懸浮織針陣列驅動結構分為上下兩部分。上部由永磁織針(永磁體與織針一體化)、頂部端蓋、直線軸承、硅鋼、永磁鐵和底部端蓋構成;下部由鐵芯、電磁線圈和機頭等組成。其結構如圖1所示。根據編織需求,通過向線圈陣列通入方向和大小不同的電流,線圈中通入的電流以及磁懸浮織針的高度和速度會共同構成了一組相互耦合的數據信號[10],其電流使得線圈產生方向和大小不同的空間磁場。織針依靠線圈產生的空間磁場[11],與自身連接的永磁體相互作用,從而實現軸向高速往復運動,并通過不同的運動狀態完成相應的編織動作[12]。
2系統硬件電路總體設計
磁懸浮織針陣列控制系統主要包括控制模塊、磁懸浮織針陣列、電機模塊、電磁驅動模塊、位移傳感器模塊和編碼器模塊。整個控制系統的總體框圖如圖2所示。系統主要由 ZYNQ 芯片內部的 FPGA 與ARM 負責控制,電機模塊驅動機頭運動,編碼器模塊記錄機頭位置,電磁驅動模塊負責磁懸浮織針陣列的驅動,位移傳感器模塊負責織針運動高度反饋。控制模塊根據系統要求對電機模塊和電磁驅動模塊進行驅動控制,同時通過編碼器和位移傳感器模塊進行反饋,形成完整的閉環控制系統。
2.1電磁線圈驅動模塊設計
在磁懸浮織針陣列控制系統中,織針的驅動依賴于電磁線圈的磁場作用。系統主要通過控制器加電流型功率放大的方式控制線圈中的電流,從而實現對磁場的控制。鑒于ZYNQ控制芯片輸出信號的負載能力較弱,無法直接驅動電磁線圈[13]。因此,本文采用驅動電路與PWM開關型功率放大電路相結合的方式來實現對電磁線圈的電流控制。在該模塊中,ZYNQ 的 PL 端充當控制器,輸出功率驅動電路所需的信號[14]。具體地,本模塊利用PL端的BANK34/35部分引腳分別與5組 LIN_A、HIN_A、LIN_B、HIN_B 相連接,同時功率放大電路A、B的輸出端與電磁線圈相連,以輸出與控制信號對應的電流,從而實現對5個電磁線圈的電流控制[15],從而實現對磁懸浮織針的驅動。該驅動框圖如圖3所示。
根據功率驅動電路的驅動要求[16],PL端需要輸出5組PWM信號以分別控制5個電磁線圈,每一組PWM信號由4路PWM信號組成。因此,本文設計了 PWM 信號發生器,在 PL 端實現了20路PWM信號的輸出功能。研究中使用了頻率為20KHz的PWM信號對電磁線圈進行控制,根據 IR2103S 芯片的信號邏輯,每一組 PWM 信號發生器需要輸出兩對互補的PWM信號,通過同時改變這兩對互補PWM波的占空比,以實現對電磁驅動電路中電流大小和方向的控制[17]。
2.2電機驅動模塊設計
在磁懸浮織針陣列控制系統中,裝備有電磁線圈陣列的機頭由步進電機傳動,而電機則由步進驅動器驅動。ZYNQ芯片的PL端負責向步進驅動器發送脈沖與電平信號,以控制電機的轉動角度和轉動方向,而在電機高速啟動和停止時,可能會導致電機抖動和堵轉的現象[18]。因此,在電機啟動和停止時,需要控制脈沖信號頻率的均勻改變,以確保電機實現平穩的加減速過程。
電機驅動模塊的設計可分為定時計數模塊、加減速使能模塊、加減速變化模塊、脈沖輸出模塊及脈沖計數模塊。其中,定時計數模塊負責計算加減速的時間;加減速使能模塊用于比較當前脈沖數與加速階段脈沖數以及減速階段的脈沖數,并在滿足對應條件時發出加減速使能信號;加減速變化模塊在接收使能信號后開始逐級加速或減速;脈沖輸出模塊產生與當前速度對應的脈沖信號;脈沖計數模塊記錄已輸出的脈沖個數。經過上述模塊的硬件邏輯設計后,可以通過狀態機實現各狀態間的轉換,這一過程通常分為空閑、加速、勻速和減速四個階段,設計的有限狀態機如圖4所示。
2.3電機編碼器接口設計
根據系統設計方案,ZYNQ 芯片的 PL 端通過接收編碼器傳送數據來確定機頭的位置。本系統使用分辨率為2000 P/R的光電旋轉增量式編碼器進行機頭位移測量。在編碼器工作時,會輸出A相、B相、Z相三路差分方波信號[19]。控制芯片接收并處理這三路信號即可得到位移數據。利用A相與B相脈沖的相對位置可以判斷轉動方向,即當A相脈沖信號超前于B相90度相位時,編碼器為正轉;反之則為反轉。此外,當編碼器完成一圈轉動時,A相或B相將輸出10000個脈沖信號,而Z相則會輸出一個信號。
本文選取A 相和B 相的脈沖信號進行機頭位置計算,并通過PL端硬件邏輯設計實現對編碼器數據的接收。主要包括脈沖信號的去抖動處理[20]、根據設定條件判斷編碼器的正反轉以及使用計數器對輸入的脈沖信號進行計數處理。硬件邏輯設計原理圖如圖5所示。
2.4位移傳感器接口設計
為了確保織針的運動高度達到預定要求,本研究使用激光位移傳感器來測定織針的高度變化,激光位移傳感器通過計算激光反射時間來測量位移,然后以模擬電壓的形式輸出位移數據(范圍為-5 V至+5 V)[21]。主控模塊可以通過接收模擬信號讀取測量數據。由于ZYNQ芯片的 PL 端無法直接處理模擬信號,因此需要使用高速AD芯片將模擬信號轉換為數字信號[22]。在此過程中,PL 端首先需要為 AD 芯片提供時鐘信號。通過官方提供的IP核,可以將系統時鐘分頻或倍頻為AD芯片所需的時鐘頻率,然后將芯片接入時鐘信號以對模擬信號進行處理,最后,PL 端設置輸入接口以接收數字信號。該過程的頂層模塊原理圖如圖6所示。
2.5磁懸浮織針陣列控制狀態機設計
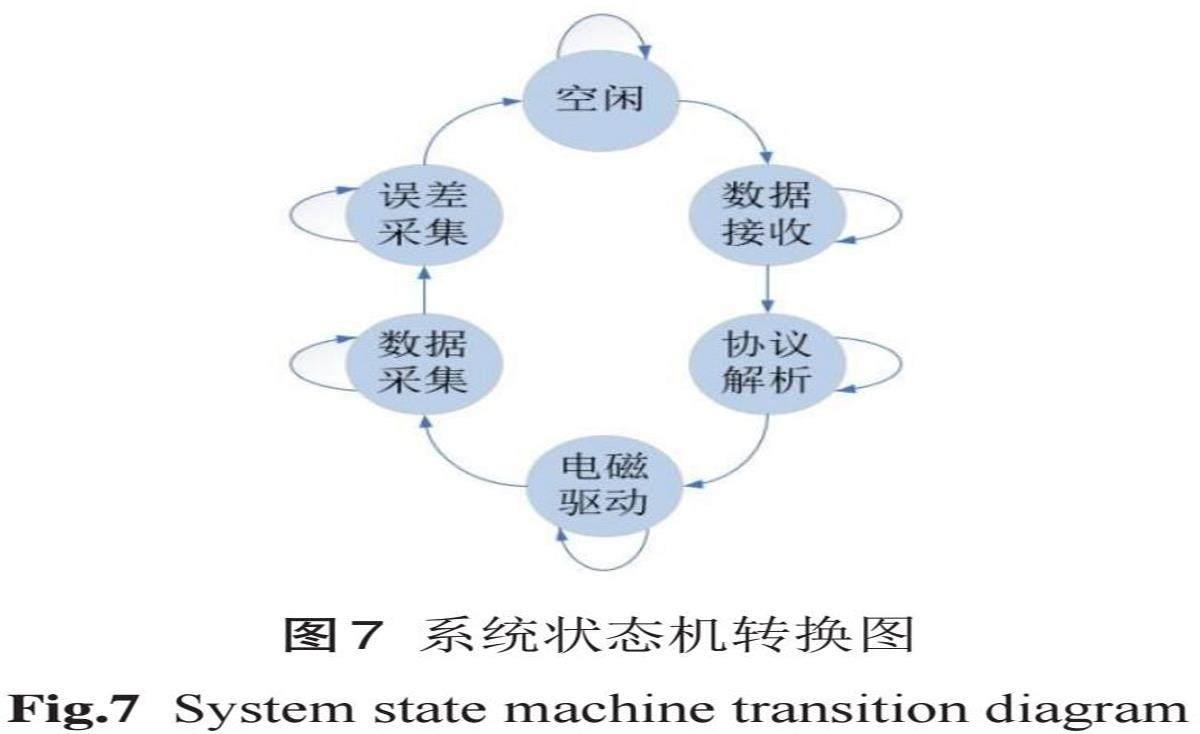
由于控制系統中的控制模塊較多,因此在串口模塊中引入了狀態機的設計,設計上采用了獨熱碼的編碼方式[23],該方式只需對寄存器中的單個位進行譯碼,可以在一定程度上簡化譯碼邏輯的過程,從而提高系統的運行速度。同時,采用了組合邏輯后增加一級寄存器的方式來有效地濾去組合邏輯輸出的毛刺[24]。控制狀態轉換圖如圖7所示,系統狀態機主要分為空閑、數據接收、協議解析、電磁驅動、數據采集、誤差修正這6個主要狀態。狀態轉換流程如下:a)狀態機首先處于空閑狀態,等待接收指令。一旦接收到指令,將跳轉到數據接收狀態;如果未接收到指令數據,狀態保持不變。b)接收到指令數據后,將數據送入相應緩存模塊,接收完畢后進入協議解析狀態。c)數據解析完畢后,根據對應數據發送電磁和電機驅動信號,進入電磁驅動狀態,對織針進行驅動。d)磁懸浮織針接收到驅動信號后,進入數據采集狀態,位移傳感模塊與編碼器模塊對織針和機頭的位移數據進行采集。e)位移數據采集完畢后,進入誤差修正狀態,將采集的位移數據與設定值對比,并進行相應補償,最后回到空閑狀態,等待下一次數據的接收。
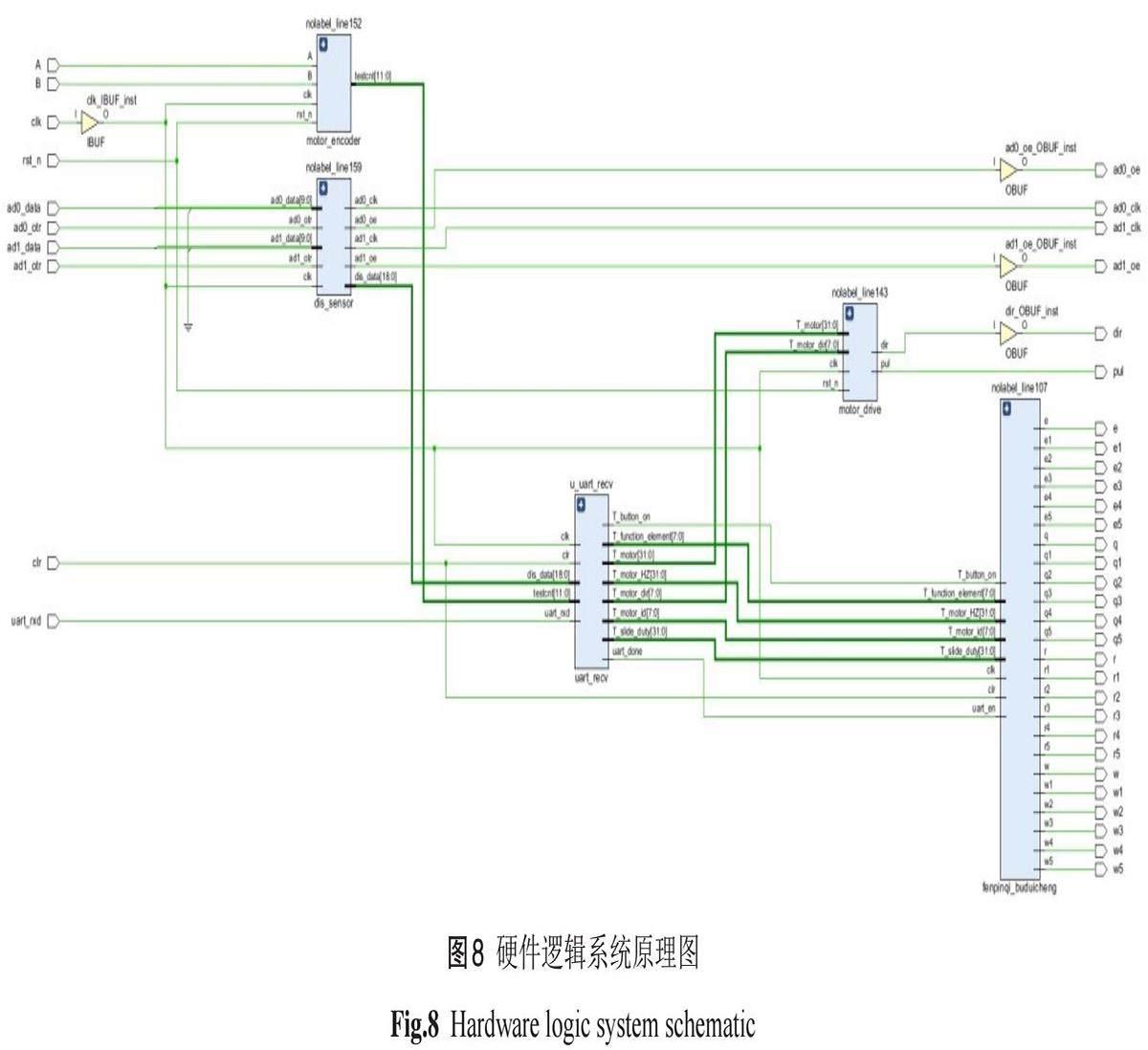
2.6磁懸浮織針陣列硬件系統設計
硬件系統的設計主要通過編寫頂層文件實現各模塊端口的互聯[25]。本硬件系統的頂層原理圖如圖8所示,系統輸入主要包括編碼器AB 相信號、時鐘信號、位移傳感器數字信號、上位機串口數據;輸出信號包括驅動時鐘信號、電機驅動器脈沖信號以及電磁線圈的PWM驅動信號。
3測試結果與分析
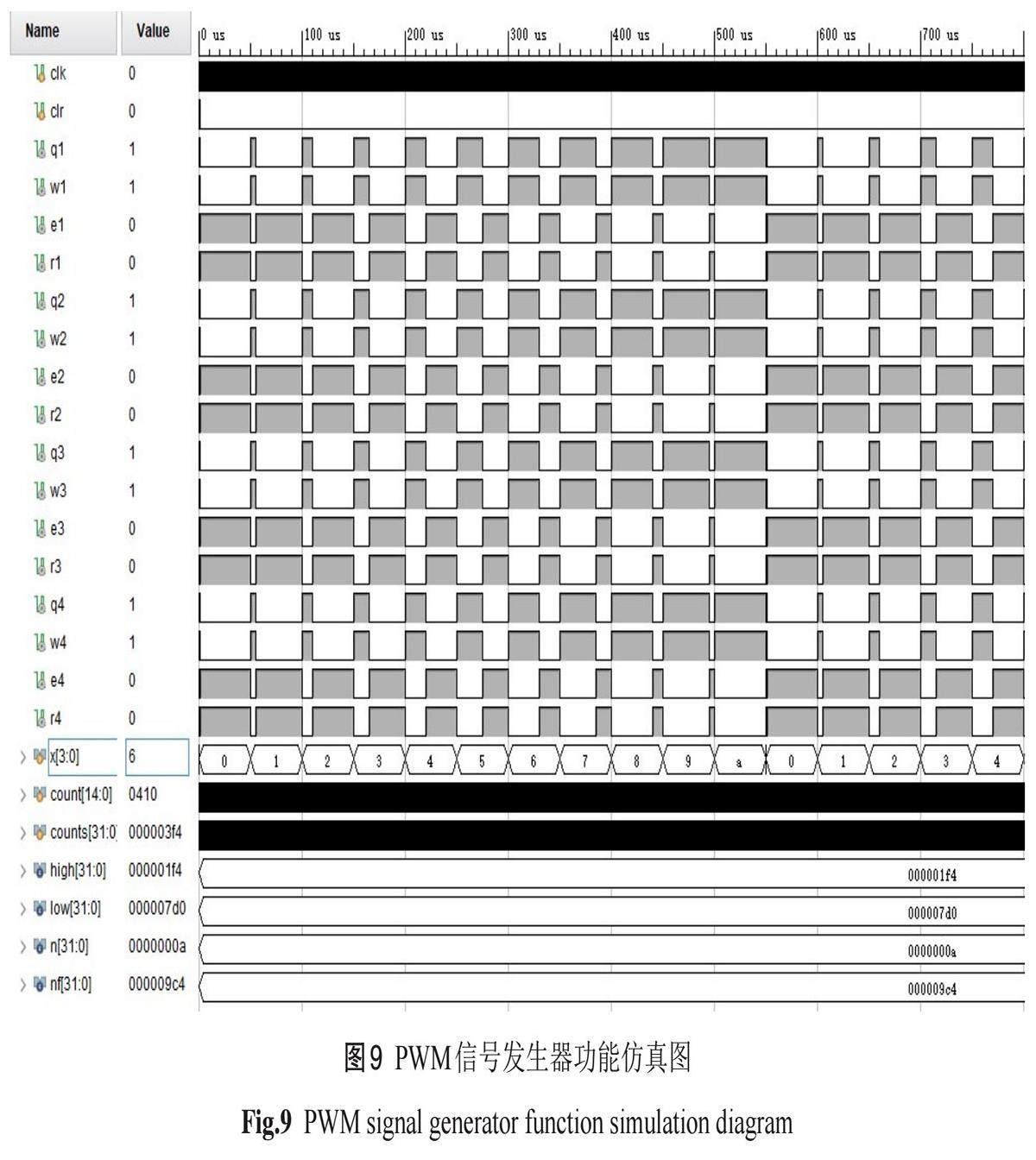
為驗證織針陣列控制系統是否達到預期結果,本研究使用Vivado內置的 Simulation工具對各模塊以及硬件邏輯系統進行仿真實驗。首先對電磁線圈驅動模塊進行仿真驗證,其仿真圖示如圖9所示。在仿真圖中,q1~q5、w 1~w5、 e1~e5、r 1~r5分別代表 PWM 輸出引腳,x 表示PWM信號的占空比數值,而count等信號則表示計數器時長等參數。需要指出的是,PWM信號的頻率為20 KHz,其占空比根據設置的數據依次進行變化,從而說明設計的PWM信號發生器輸出的信號滿足驅動電路的要求。
為驗證磁懸浮織針控制系統是否正常工作,本研究通過頂層模塊實現了ZYNQ芯片的PL端與PS端的互聯。為充分發揮ZYNQ芯片的片內通信優勢,本研究將PL端的硬件邏輯系統封裝到一個帶有AXI總線的IP核中。在整個設計過程中, PL端通過AXI總線傳輸位移數據至PS端。具體操作包括在Block Design圖形界面中將已封裝好的自定義IP核與PS端的官方IP核添加至指定頁面,并建立PL端與PS端的布局連線,綜合執行通過后生成 FPGA 的比特流文件,并將其導入到 SDK軟件中,最后將PS端程序一起下載進ZYNQ 芯片中。Block Design設計頁面如圖10所示。
ZYNQ芯片下載程序后系統開始工作,將運動織針的位移數據發送至上位機的對應軟件中,并繪制位移曲線。在圖11中展示了位移數據的波形圖,其中藍色直線代表目標值,紅色曲線則表示實際位移量。目標值與實際值存在誤差是因為織針與管壁之間的摩擦力較大,有一定幾率出現織針卡頓的情況,同時線圈可能存在漏磁等問題,且織針的運動高度越高,漏磁現象會越嚴重。本文將PID算法引入系統調節中,讀取位移數據后,將目標值與實際值進行差值計算,經過三次計算后,由差值推導出增量值,隨后將增量值輸出至PL端,PL端輸出對應的PWM信號,輸出之后再次讀取位移數據,重復上述步驟,所以在多次改變目標值的大小后,可以觀察到位移曲線與目標值基本符合,且響應速度滿足要求。這表明算法功能基本滿足預期需求。
在磁懸浮織針陣列實際編織時,為保證編織過程的正常進行,需要使機頭的運動速度與磁懸浮織針的響應速度相匹配。因此進行了磁懸浮織針運動頻率測算的實驗,實驗中使用了直流電源、磁懸浮織針陣列驅動結構、ZYNQ控制板以及串口觸摸屏等設備。在實驗過程中,控制板通過調節電磁線圈的電流信號來驅動織針進行軸向往返運動,而串口觸摸屏則可以調節電磁線圈中的電流大小和變化頻率。本實驗所使用的方波脈沖寬度為50μs,PWM 信號的頻率為20 KHz,PL端需輸出5組PWM信號,每組PWM信號由4路 PWM 信號組成,實現20路 PWM 信號的輸出功能。在本實驗中,向線圈中通入1.3 A 和0.75 A的電流,分別測試織針在不同頻率下的運動高度,實驗結果如表1所示,當電流大小為1.3 A且頻率高于8 Hz時,織針運動高度開始遞減,織針達到成圈高度20 mm 的最大頻率為12 Hz;而當電流大小為0.75 A時,頻率高于6 Hz時織針運動高度開始遞減,織針達到集圈高度12 mm的最大頻率為10 Hz。
本實驗中的針距設置為1.2 cm,為了滿足成圈和集圈過程中織針都達到高度要求,頻率選為10 Hz,則機頭上5個線圈完成一枚織針針動作所用的時間為0.1 s 。整個編織動作分5步完成,步進軌跡圖如圖12所示。當織針進行成圈動作時,由機頭上的前3個線圈依次將織針驅動到20 mm的高度,第4號線圈保持20mm的高度,第5號線圈產生吸引力將織針吸至原點。當織針進行集圈動作時,由機頭上的前2個線圈依次將織針驅動到12mm的高度,第3號和4號線圈保持12 mm的高度,最后一個線圈同樣將織針吸回至原點。
機頭的最大運動速度為0.6 m/s,計算公式如下:
式中:N 為機頭上的線圈數,d 為針距,T 為所有線圈完成一枚織針針動作所用的時間。
完成對磁懸浮織針陣列控制系統功能模塊的仿真實驗后,本研究搭建了實驗平臺對整個系統進行測試。該實驗平臺主要由ZYNQ控制板、電源、磁懸浮織針陣列驅動結構、紅外位移傳感器、機頭、編碼器、觸摸控制器和示波器組成。在實驗中,控制板發出主要控制信號后,步進電機驅動器和控制板上的電磁驅動模塊分別實現了機頭與織針的驅動。系統根據編碼器反饋的機頭位置對織針進行連續驅動,而位移傳感器則負責傳輸織針的位移高度。整個系統依次對所有磁懸浮織針進行逐一控制。
磁懸浮織針陣列試驗圖如圖13所示。在該試驗中,機頭以0.6 m/s的速度移動時,電磁線圈依次對每一枚織針進行驅動,使其依次運動到成圈、集圈高度再返回原點。示波器測得控制板輸出的PWM信號較穩定,織針運動高度符合預期結果。總體而言,控制系統的效果與預期基本一致,驗證了控制系統的可行性。
4結論
本研究設計了一種以ZYNQ開發板為核心的磁懸浮織針陣列控制系統。針對驅動磁懸浮織針陣列的多路控制,進行了系統硬件結構、 FPGA內部結構、軟件開發及仿真的設計。通過 Simulation仿真模擬,確定了控制系統的各項參數后,搭建了完整的系統試驗平臺,并對磁懸浮織針陣列進行了控制實驗。在10 Hz 的運動頻率下重復進行多次編織動作實驗,結果表明機頭均能夠按照預期要求的速度進行運動,且磁懸浮織針均可上升至指定高度后再被吸下。因此,本文中的機頭與磁懸浮織針在實驗過程中均表現穩定,驗證了本設計的控制系統具有較好的控制效果。
參考文獻:
[1]呂建飛, 傅建中.基于嵌入式ARM全自動橫機的控制系統[J].紡織學報, 2005, 26(6):101-103.
LV Jianfei, FU Jianzhong. Control system of auto- matic flat knitting machine based on embedded ARM [J]. Textile Journal, 2005, 26(6):101-103.
[2]汝吉東, 王穎, 孫振龍.采用ARM9和雙CPLD的高速橫機控制系統軟硬件設計[J].紡織學報, 2014, 35(11):146-150.
RU Jidong, WANG Ying, SUN Zhenlong. Hard- ware and software design of high-speed flat knit- ting machine control system using ARM9 and du- al CPLDs[J]. Textile Journal, 2014, 35(11):146-150.
[3]顧涵, 潘啟勇, 華強, 等.基于ARM和FPGA電腦橫機選針器控制系統設計[J].針織工業, 2021, (11):8-12.
GU Han, PAN Qiyong, HUA Qiang, et al. Design of needle selector control system for computerized flat knitting machine based on ARM and FPGA [J]. Knitting Industry, 2021, (11):8-12.
[4]蔡立挺, 傅建中, 姚鑫驊.嵌入式電腦橫機花型數據的編譯處理[J].紡織學報, 2008, 29(6):113-116.
CAI Liting, FU Jianzhong, YAO Xinhua. Compila- tion and processing of pattern data of embedded computer flat machine [J]. Textile Journal, 2008, 29(6):113-116.
[5]MANSHAHIA M, ?DAS A.Thermophysiological comfort characteristics of plated knitted fabrics [J]. Journal of the Textile Institute Proceedings & Abstracts, 2014, 105(5):509-519.
[6]錢程, 格羅茨.新一代織針[J].國際紡織導報, 2006, 34(3):54.
QIAN Cheng, GROTZ. A new generation of knit- ting needles [J]. International ?Textile ?Review, 2006, 34(3):54.
[7]龍海如.國內外針織機械新的技術發展[J].江蘇紡織, 2004(5):16-19.
LONG Hairu. New technology development of knitting machinery at home and abroad [J]. Jiang- su Textiles, 2004(5):16-19.
[8]聶陽, 王博文, 王宇鵬, 等. Zynq SOC嵌入式圖像邊緣檢測系統設計[J].科技創新與應用, 2020(23):54-56.
NIE Yang, WANG Bowen, WANG Yupeng, et al. Design of Zynq SOC embedded image edge detec- tion system[J]. Science and Technology Innova- tion and Application, 2020(23):54-56.
[9]ALIA, DJELOUAT H, AMIRAA, et al. Electron- ic nose system on the Zynq SOC platform [J]. Mi- croprocessors and Microsystems, 2017, 53(1):45-56.
[10]許章汛, 張弛,李紅軍,等.基于數字孿生的磁懸浮織針監控研究與應用[J].紡織工程學報, 2024, 2(1):80-89.
XU Zhangxun, ZHANG Chi, LI Hongjun, et al. Research and application of magnetic levitation needle monitoring based on digital twin[J]. Jour- nal of Textile Engineering, 2024, 2(1):80-89.
[11]戴健雄.混合式磁懸浮織針驅動控制研究[D].武漢:武漢紡織大學, 2022.
DAI Jianxiong. Research on hybrid magnetic lev- itation needle drive control[D]. Wuhan: WuhanTextile University, 2022.
[12]李冬冬, 張成俊, 左小艷, 等.混合磁懸浮織針驅動的永磁織針磁場分布規律[J].2020, 41(1):36-42.
LI Dongdong, ZHANG Chengjun, ZUO Xiaoy- an, et al. Magnetic field distribution of perma- nent magnet needle driven by Hybrid magnetic suspension needle [J].2020, 41(1):36-42.
[13]崔一鳴.基于ZYNQ的掌上超聲成像系統前端設計與實現[D].哈爾濱:哈爾濱工業大學, 2017.
CUI Yiming. Front-end design and implementa- tion of palm ultrasound imaging system based on ZYNQ[D]. Harbin : Harbin Institute of Technolo-gy, 2017.
[14]XU Y, ZHANG W, HUANG Y, et al. Reduction method of high- frequency audible PWM noise for three- phase permanent magnet synchronous motors [J]. Energy Reports, 2020, 6(112):3-9.
[15]張成俊.一種高速磁懸浮織針陣列控制系統及其控制方法:中國, CN202210865609.X[P].2022-11-01.
ZHANG Chengjun. A high-speed magnetic levi- tation needle array control system and its control method: China, CNCN202210865609.X[P].2022-11-01.
[16]KASHIF S, SAQIB M A, ZIA S.Implementing the induction-motor drive with four-switch invert- er: An application of neural networks [J]. Expert Systems with Applications, 2011, 38(9):37-48.
[17]Zhang Z, Xie S, Wu Z, et al. Soft-switching and low conduction loss current-fed isolated bidirec- tional DC- DC converter with PWM plus dual phase-shift control[J]. Journal of Power Electron- ics, 2020, 20(3):664-674.
[18]石屾, 董春.直流無刷高速電機驅動電路設計及改進[J].機械與電子, 2011(6):35-38.
SHI Shen, DONG Chun. Design and improve- ment of DC brushless high-speed motor drive cir- cuit[J]. Machinery and Electronics, 2011(6):35-38.
[19]汪偉, 王炳友, 楊月月.基于FPGA 的增量式編碼器信號采集系統設計[J].云南化工, 2021, 48(3):133-135.
WANG Wei, WANG Bingyou, YANG Yueyue. Design of FPGA-based incremental encoder sig- nal acquisition system[J]. Yunnan Chemical In- dustry, 2021, 48(3):133-135.
[20]王慶.基于ZYNQ的智能裁切機裁切速度控制方法的研究[D].鹽城:鹽城工學院, 2023.
WANG Qing. Research on cutting speed control method of intelligent cutting machine based on ZYNQ[D]. Yancheng : Yancheng Institute ?of Technology, 2023.
[21]曹紅超, 陳磊, 王波, 等.一種改進型高精度激光三角位移傳感器的結構設計研究[J].激光雜志, 2007, 28(6):14-15.
CAO Hongchao, CHEN Lei, WANG Bo, et al. Structural design of an improved high-precision laser triangular displacement sensor [J]. Laser Journal, 2007, 28(6):14-15.
[22]王樹青.基于Zynq平臺的無人機信號處理嵌入式系統設計與實現[D].成都:電子科技大學,2019.
WANG Shuqing. Design and implementation of UAV signal processing embedded system based on Zynq platform[D]. Chengdu: University ofElectronic Science and Technology, 2019.
[23]趙晨光, 周次明, 龐彥東, 等.基于獨熱碼有限狀態機的斐索干涉解調相位補償方法[J].光子學報, 2020, 49(5):7-15.
ZHAO Chenguang, ZHOU Ciming, PANG Yan- dong, ?et ?al. Phase compensation method ?for Fischer interferometric demodulation based onsolo thermal code finite state machine[J]. Journal of Photonics, 2020, 49(5):7-15.
[24]羅翔, 李嬌龍, 田正凱.基于Verilog HDL的有限狀態機的優化設計[J].電子質量, 2012(3):36-38+42.
LUO Xiang, LI Jiaolong, TIAN Zhengkai. Opti- mal design of finite state machine based on Veril- og HDL [J]. Electronic Quality, 2012(3):36-38+42.
[25]張成俊.基于FPGA的磁懸浮織針陣列系統與 PC機的通信方法:中國, CN202210528586.3[P].2022-12-20.
ZHANG Chengjun. Communication method be- tween magnetic levitation needle array system and PC based on FPGA: China, CN 202210528586.3[P].2022-12-20.
(責任編輯:周莉)
