某船電動升降式雷達桅開發設計
2024-05-26 05:45:54陳壯張夢婷陳鵬
廣東造船 2024年2期
陳壯 張夢婷 陳鵬

摘? ? 要:船舶因雷達桅高度往往導致其無法通過航道上有高度限制的建筑物,傳統的解決方案通常是把雷達桅做成局部可倒式。但可倒式桅桿存在諸多缺點,如布置受限于船舶長度方向的限制;可倒部分可能進入磁羅經的磁化范圍內,影響磁羅經使用;可倒桅桿長時間在磁羅經范圍內,可能被磁化,需要采用不銹鋼或鋁制等不受磁羅經影響材料,成本高等。本文以某PCTC汽車滾裝船雷達桅為改進目標對象,設計開發一種電動升降式雷達桅,使用Solidworks對其機械執行系統進行強度分析,使用AMESim對其驅動系統進行功能性驗證及可行性分析,以提高電動升降式雷達桅設計質量。
關鍵詞:電動升降式雷達桅;Solidworks;AMESim
中圖分類號:U667.1? ??? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A
Development Design of Marine Electric Lifting Radar Mast
Based on Solidworks and AMESim
CHEN Zhuang 1,? ZHANG Mengting2,? CHEN Peng3
( 1. Shanghai Merchant Ship Design and Research Institute, Shanghai 201203; 2.CSSC-WaiGaoQiao Cruise Supply Chain Co., Ltd.,? Shanghai 200137;
3. CSSC Starry Energy Conservation Technology (Shanghai) Co., Ltd.,? Shanghai 201203 )
Abstract: The highest point of a ship is usually its radar mast, which always leads to the fact that the ship can not pass through special canal or special port which has a limit on ships height. The current design is generally to make the radar mast to partial reversible mast, but the reversible mast? ?has many disadvantages, such as: the arrangement is limited by the length direction of the ship; the reversible part may enter into the influence range of magnetic compass and affect the use of magnetic compass; the reversible part may be magnetized for entering long time into the influence range of magnetic compass, and need to use stainless steel or aluminum and other material not affected by magnetic compass, which cost expensive. Based on a PCTC Ro/Ro ships radar mast as an improving target object, this paper developed and designed an electrical lifting radar mast, by using Solidworks to analyze the strength of its mechanical executive system, and by using AMESim to verify the function and feasibility of its drive system, so as to optimize the design of electrical lifting radar mast.
Key words: electrical lifting radar mast;? Solidworks;? AMESim
1? ? ?前言
船舶逐漸大型化,船舶的高度越來越高。但目前很多航道、港口、運河對船舶的通行高度有限制,船舶的最高點一般是其桅桿,往往是導致船舶無法通過航道建筑物的直接因素。例如,某20 000箱級別的集裝箱,船的桅桿最大高度約為79 m,其尾部輕載吃水10 m,首部輕載吃水5.7 m,桅桿頂部距離其輕載吃水約71 m,而世界上一些著名的大橋,其通航凈高均小于70 m。如巴拿馬運河57.91/62.5 m、蘇伊士運河70 m、紐約港附近的Verrazano Bridge 69 m、舊金山港附近的Golden Gate 67 m、紐約港附近的Bayonne Bridge 66 m、丹麥島嶼間從北海至波羅的海的Great Belt Bridge 65 m。
江海直達航運的船舶需要進入內河航道,而內河基建、橋梁建造時間久遠,當時并未考慮到后來航運業的發展,其通航凈高較小,使現有船舶因為受限于橋梁高度,而無法通過。以長江為例,部分主要橋樑的通航高度大致如下:蘇通大橋62 m;江陰、潤揚50 m;南京長江大橋24 m;武漢長江大橋18 m;1968年建成的南京大橋通行限高24 m;1957年建成的武漢大橋通行限高18 m;南京至武漢的橋的通行限高24 m;武漢上游的通行限高18 m。
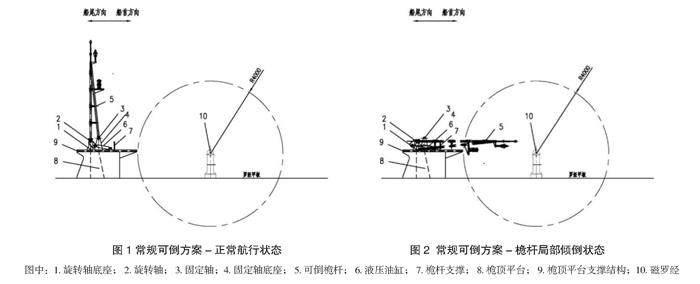
為滿足通行要求,傳統解決方案一般是把雷達桅設計成局部可倒式。其通常由旋轉軸底座、旋轉軸、固定軸、固定軸底座;可倒桅桿、液壓油缸、桅桿支撐、桅頂平臺、桅頂平臺支撐結構等組成,如圖1、圖2所示。通常可倒桅桿為桁架式結構,上面配備航行燈、信號燈、天線等航行信號設備。局部可倒式雷達桅底部設有銷軸孔,其通過旋轉軸安裝在旋轉軸底座上,并由固定軸安裝在固定軸底座上;底部設有液壓油缸連接孔,與液壓油缸連接。正常航行時,使用固定軸將可倒桅桿固定在垂直狀態。需要傾倒時,拆除固定軸后,可倒部分桅桿依靠液壓油缸的動作繞旋轉軸旋轉。旋轉至傾倒狀態時,可倒桅桿支撐在桅桿支撐上。該狀態下,可倒部分桅桿往往處于磁羅經的影響范圍內。其中的液壓油缸也可以被卷揚機驅動的鋼絲繩、氣動缸、電動缸等代替。
該型式可倒桅桿通常會有如下缺點:由于桅桿一般布置在羅經甲板上,向船尾方向通常會布置煙囪,桅桿無法向船尾傾倒;在船首方向一般會有磁羅經,而可倒部分傾倒時又會進入磁羅經的磁化范圍內(一般為4 m直徑的范圍內);可倒桅桿可能會長時間處于磁羅經磁化范圍內而被磁化,則需要采用不銹鋼或鋁制等不受磁羅經磁化的材料,價格昂貴。因此,有必要設計一種新型雷達桅以替代目前局部可倒雷達桅方案,以解決目前可倒雷達桅的不足,并保證船舶能安全通過對高度有限制的港口及航道。
AMESim(Advanced Modeling Environment for performing Simulation of engineering systems)是一種工程系統高級建模的仿真平臺[1]。AMESim采用標準的ISO圖標和簡單直觀的端口框圖,具有豐富的可用模型。例如,其涵蓋液壓、液壓管路、液壓元件設計、液壓阻力、機械、熱流體、電氣、控制等領域,上述領域均可在此開發平臺上統一實現系統工程的建模和仿真,而成為多科學、多領域系統分析的標準環境,可為用戶建立復雜系統提供極大便利,為此,其廣泛地應用于工控領域。考慮到AMESim在控制及多領域一體仿真等方面的優勢,本文在使用軟件Solidworks[2]完成電動升降式雷達桅模型搭建及機械執行系統強度分析的基礎上,使用工業軟件AMESim完成電動升降式雷達桅驅動系統的模型搭建及仿真分析,以對其驅動系統進行功能性驗證及可行性分析,進而優化電動升降式雷達桅設計。
2? ? 電動升降式雷達桅概況
本電動升降式雷達桅設計以某型PCTC汽車滾裝船局部可倒雷達桅為目標對象,設定其目標功能:升降平臺起升重量3 000 kg,升降行程2 500 mm。電動升降式雷達桅系統功能設計為:以電動機為驅動力,通過蝸輪蝸桿機構及齒輪齒條驅動二級剪叉機構裝置,控制雷達桅活動平臺上下移動,實現對雷達桅高度的控制。圖3分別為本電動升降式雷達桅正常航行狀態及通過限高建筑物狀態的示意。
3? ? 機械系統設計分析
本電動升降式雷達桅機械系統由機械驅動系統和機械執行系統組成,包括電動機、蝸輪蝸桿、齒輪齒條、傳動軸、聯軸器、二級剪叉機構,如圖4所示。
機械系統功能實現方式為電動機驅動蝸輪蝸桿,與蝸輪共軸齒輪驅動齒條,齒條推動二級剪叉機構下活動支點水平前后移動,進而通過二級剪叉機構帶動雷達桅升降平臺上下移動。
基于本升降式雷達桅運動部件主要由二級剪叉機構及驅動系統組成,因此機械系統設計的重點應在于二級剪叉機構強度分析及驅動系統的功能性驗證及可行性分析。
3.1? ?二級剪叉機構強度仿真分析
根據初步設計參數,在三維軟件Solidworks中搭建升降式雷達桅三維模型,其中二級剪叉機構正常航行及通過限高建筑物的狀態,如圖5和圖6所示。
考慮到二級剪叉機構在下降/收起狀態時受力較大,因此對此工況下的二級剪叉機構進行有限元分析。在Solidworks中搭建仿真分析模型并進行網格劃分,如圖7所示。
設定仿真參數,固定二級剪叉機構活動支點,添加重力及載重力,設定零部件材料屬性,運行仿真模型,二級剪叉機構應力仿真結果,如圖8和圖9所示。
由有限元分析結果可知,剪叉桿及鉸鏈強度滿足要求,應力集中主要出現在活動鉸鏈處,最大應力約為243 MPa,為保證二級剪叉機構可靠性,活動鉸鏈可進一步優化設計。
3.2? ?驅動系統功能驗證分析
在工業仿真軟件AMESim中搭建驅動系統模型,包括電動機、蝸輪蝸桿、齒輪齒條、傳動軸及計算模塊等,如圖10和圖11所示。
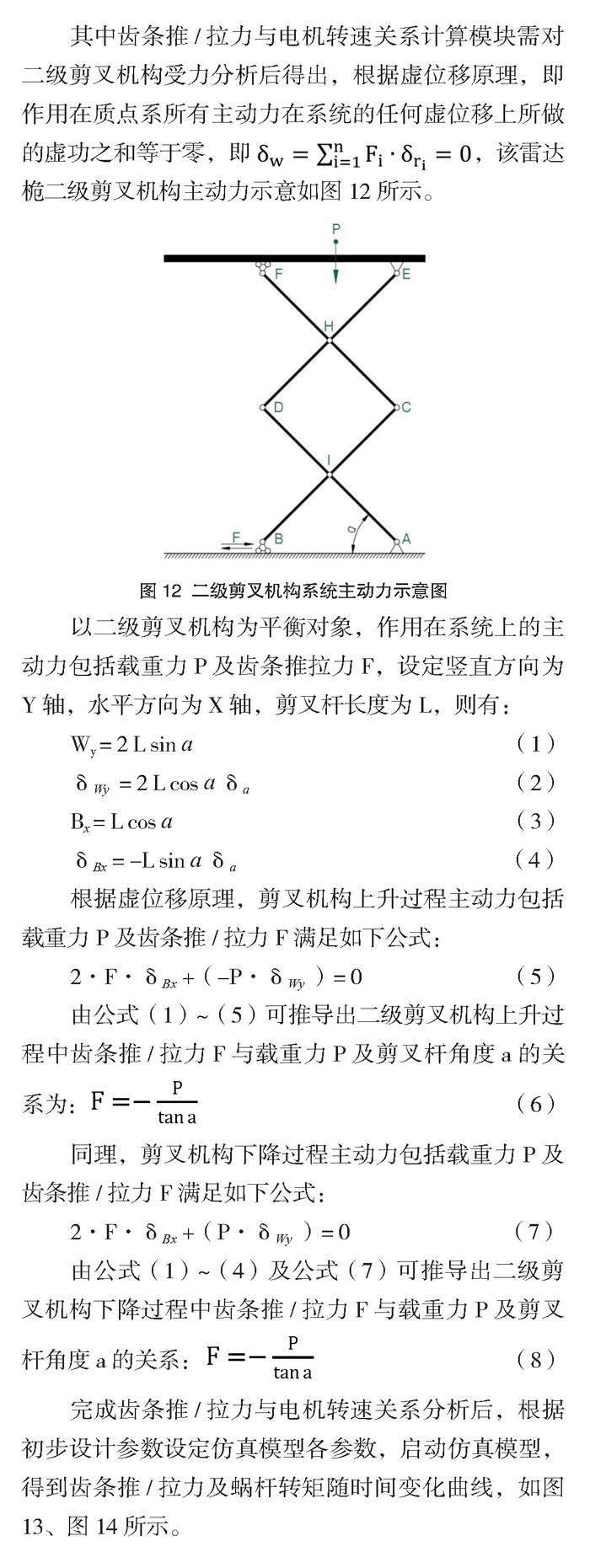
其中齒條推/拉力與電機轉速關系計算模塊需對二級剪叉機構受力分析后得出,根據虛位移原理,即作用在質點系所有主動力在系統的任何虛位移上所做的虛功之和等于零,即 ,該雷達桅二級剪叉機構主動力示意如圖12所示。
以二級剪叉機構為平衡對象,作用在系統上的主動力包括載重力P及齒條推拉力F,設定豎直方向為Y軸,水平方向為X軸,剪叉桿長度為L,則有:
Wy = 2 L sin a? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
δWy? = 2 L cos a δa? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
Bx = L cos a? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(3)
δBx = -L sin a δa? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (4)
根據虛位移原理,剪叉機構上升過程主動力包括載重力P及齒條推/拉力F滿足如下公式:
2·F·δBx +(-P·δWy )= 0? ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
由公式(1)~(5)可推導出二級剪叉機構上升過程中齒條推/拉力F與載重力P及剪叉桿角度a的關系為:? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(6)
同理,剪叉機構下降過程主動力包括載重力P及齒條推/拉力F滿足如下公式:
2·F·δBx +(P·δWy )= 0? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (7)
由公式(1)~(4)及公式(7)可推導出二級剪叉機構下降過程中齒條推/拉力F與載重力P及剪叉桿角度a的關系:? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(8)
完成齒條推/拉力與電機轉速關系分析后,根據初步設計參數設定仿真模型各參數,啟動仿真模型,得到齒條推/拉力及蝸桿轉矩隨時間變化曲線,如圖13、圖14所示。
最終仿真結果,齒條初始推拉力約為109 742 N,與理論計算值105 844 N基本相符;蝸桿所需最大轉矩約為434 N·m,計算可得電動機功率約為28 kW,與理論計算值27.3 kW基本相符。仿真結果表明本驅動系統功能符合設計要求。
4? ? 結束語
本文提出了一種電動升降式雷達桅方案來替代傳統的雷達桅局部可倒桅方案,解決了目前可倒桅影響磁羅經正常使用等問題,并保證船舶能通過有通行高度限制的建筑物。使用三維軟件Solidworks完成電動升降式雷達桅主要模型搭建及關鍵零部件強度分析,使用工業軟件AMESim完成電動升降式樣雷達桅驅動系統的仿真分析,驗證電動升降式雷達桅驅動系統設計的可行性,可提高其設計質量。為進一步深化設計工作,以利投入到實船應用,建議后步對二級剪叉機構鉸鏈進行優化及雷達桅振動分析。
參考文獻
[1] 梁全,謝基晨,聶利衛. Amesim機電一體化仿真教程[M].北京: 機械工業出版社, 2021.
[2] 魏崢,趙功,宋曉明. Solid Works 設計與應用教程[M].北京: 清華大學出版社, 2009.
作者簡介:陳? 壯 (1991- ),男,高級工程師。從事船舶舾裝設計工作。
張夢婷 (1989- ),女,高級工程師。從事船舶結構、舾裝設計工作。
收稿日期:2022-06-27
