基于旋轉翼無人機的海洋區域航測研究
2024-05-28 00:00:00楊勵軍
企業科技與發展 2024年2期

摘要:無人駕駛飛行器(無人機)是非常靈活的測量平臺,可以從研究地點上方的固定位置收集接近連續的中等空間分辨率和高解析度的圖像。文章探討旋轉翼無人機在監測海面區域方向的潛力,提出利用旋轉翼無人機在中等高度空間獲取高分辨率和高解析度圖像的航測方案,確定海洋劃定區和海灘的特征,獲取日常海灘的安全信息。利用航測獲取的信息可評估污染物擴散和海洋平流層變化的趨勢,有助于更全面地了解海洋環境,為海洋資源開發和海洋環境保護提供數據支撐。
關鍵詞:旋轉翼無人機;海洋區域;航空監測; 圖像解析
中圖分類號:P231" " " 文獻標識碼:A" " " 文章編號:1674-0688(2024)02-0118-04
0 引言
無人駕駛飛行器(無人機)是一種較小的遠程操作飛機,與其他需要高空間環境的機載光學測量平臺相比,無人機較易獲得中等空間分辨率和高解析度的圖像。較低的運營成本使無人機作為環境調查平臺的應用越來越廣泛,新的應用包括農業、考古、氣象和海洋等領域的繪圖和監測。無人機分為2類,一類是固定翼飛行器,類似于小型飛機;另一類是旋轉翼飛行器,類似于直升機,有多個螺旋槳在水平面上旋轉[1]。無人機可應用于長期監測工作,如大氣監測、海岸侵蝕調查、海灘垃圾監測、野生動物監測等。王千秋等[2]研發一套基于無人機的模塊化大氣污染監測系統對大氣情況進行監測,不足之處在于系統的可靠性和穩定性無法保證,數據的處理和分析算法也需要優化和改進,無法用于海洋環境監測。劉勐等[3]主要研究無人機傾斜攝影在滑坡區域的監測,不足之處在于無人機在飛行過程中受到天氣條件的限制,對飛行的高度和角度要求較高,并且無人機傾斜攝影的成本較高,不適用于海洋區域航測。盛希寧[4]基于四旋翼無人機的飛行優勢,設計針對三維空間進行環境監測的系統,可實時采集不同高度的環境監測數據,該系統雖然具有巨大的應用潛力和優勢,但是無人機的飛行時間有限,對使用環境的要求較高,無法滿足海洋區域長期監測的要求。
無人機在數據采集和數據處理方面具有優勢,通過使用無人機進行空中勘測,使海洋監測不再局限于監測區的當地條件。此外,航空成像非常適合與機器學習工具集成,這些工具已經被用于解決一系列海洋環境研究中的復雜目標認知和分類問題。無人機可以攜帶高清相機、多光譜相機、紅外相機等多種傳感器,對海洋中的水質、植被、海洋生物等進行高精度、大范圍的測量,為海洋生態環境保護和管理提供數據支持。旋翼無人機在航測過程中相機的傾斜角度會導致不等距的像素分辨率,該分辨率隨著相機與目標距離的縮小而逐漸增大。旋翼無人機可以直接在測量劃定區上方運行,以很低的成本連續拍攝高分辨率的圖像。本文討論了2種旋翼無人機的操作用途和監測誤差,并提出一種海洋劃定區監測工作方式。
1 航測方案
1.1 選擇無人機
本文選擇了2種類型的商用旋轉翼無人機,型號分別為Y6及AT6,用于航測固定的海洋區域。這2個型號的無人機都是六旋翼機,與AT6相比,Y6的三支柱配置更具優勢,其螺旋槳布局穩定,只有5個旋轉葉片,可提供更廣闊的無障礙視野。但是,當無人機在水上運行時,AT6所載電機比Y6的穩定性更好。無人機的導航通過計劃任務和航路點自主執行,或通過無線電控制遠程執行。機載飛行控制器能通過內部傳感器穩定和保持無人機的位置和高度。無人機數據存儲于機身的儲存器,分別以2 400 MHz和915 MHz的頻率實時傳輸給操作員;來自機載攝像頭的實時饋送以5.8 GHz的頻率傳輸給操控系統。
1.2 相機和鏡頭校正
在航測期間,2架無人機都配備了黑色版攝像機以及能由操作員精確控制俯仰的陀螺平衡環。這種相機與無人機組合具有2個突出的優點:一是相機屬于輕量級,可使無人機獲得更長的飛行時間;二是魚眼鏡頭具備大的視野,這也是從有限的高度捕捉大面積畫面的必要條件。攝像機視角為傾斜角度,可以實現沿岸地面覆蓋和跨岸地面覆蓋[4-5]。
當飛行高度在5 m時,目前常用的無人機能拍攝像素密度為5~9 pt/cm的照片,允許其集成用于基于機器學習的目標檢測算法,并為人眼的劃定區檢測和分類提供良好的條件。高度 H3根據安裝在無人機上的照相機的規格進行設置,劃定寬度 B 和一個額外的寬度B1計算海岸兩側的寬度。假設攝像機處于最低點,H3可用以下公式計算:
其中:[Sw35]為一個35 mm全幀照相機的傳感器寬度;[f35]為照相機焦距為35 mm的等效格式;B為劃定區域的寬度,B1為估計的劃定寬度。
沿著劃定海洋區域樣帶橫斷面布設的測量位置(N)的數量可以通過以下方式計算:將劃定區域寬度B 除以在高度 H1處的相機的水平視野(HFOV),取四舍五入后的整數。根據在最低點拍攝像機的角度,并且假設其他方向節軸線等于0°,所用相機水平視野的計算公式為
測量位置(N)的數量可以用以下公式計算:
將計算結果四舍五入為整數即可得到測量位置的數量,本實踐應用案例的計算結果為12個測量位置,該數量可實現94%的劃定區域寬度被視野覆蓋。
1.3 航測規劃
海洋劃定區航測主要過程的時間尺度通常為秒到分鐘,需要每隔幾秒鐘獲取一次圖像,以正確解析劃定區的圖像學。本文使用相機的延時功能,采樣率為0.5 Hz,照片分辨率為1 200萬像素。為了獲得一個近乎連續的數據集,本實驗周期性部署飛行2架無人機。當第一架無人機的電池達到下限時,第二架無人機起飛并開始監測。2架無人機被自動編程在同一位置徘徊,保持觀察位置不變,這種循環方案可確保無人機連續不斷地待命。為了延長使用時間,無人機電池可利用便攜式汽油發電機就地充電。
2 航測應用過程
2.1 地理校正
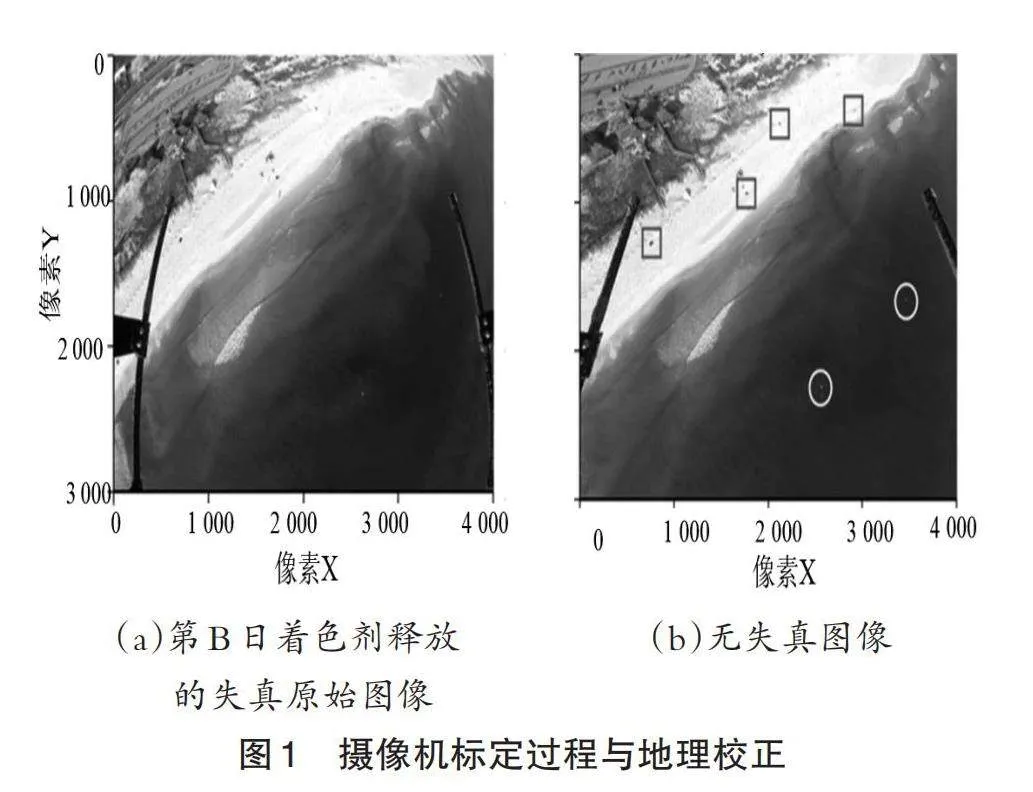
為了使用航空圖像補充可用的現場數據,可將二維(2D)圖像平面投影到三維(3D)地理平面上。相機校準定義了2D圖像和3D地理平面之間的關系。通常,相機校準包括2個步驟:首先從圖像中去除透鏡失真,其次以透視變換的方式將2D圖像平面投影到3D地理平面上(見圖1)。為了找到必要的變換矩陣,需將地面控制點的像素位置與它們在現實世界中已知的 GPS(全球定位系統) 位置聯系起來。在實驗期間,需要設置陸基控制點,即海灘上的藍色長方形防水布[圖1(b)中的方塊處],以及水基地面控制點,即固定在劃定區外底部的布吉板[圖1(b)中的圓圈處]。每個實驗日,使用精確到1 cm的RTK(實時動態載波相位差分技術),通過GPS測量防水布的輪廓。布吉板配備了GT31 GPS定位器,精確到2~3 m。使用變換矩陣,將圖像投影到地理平面上,結果被稱為正射影像。圖1的像素分辨率在0.035~0.7 m范圍內,具體取決于飛行高度、相機傾斜度以及正射影像覆蓋的區域等。最大和平均重投影誤差(即地面控制點的GPS測量位置與從正射照片獲得的地面控制點位置之間的差)分別為1.22 m和0.71 m。誤差主要受到以下因素的影響:①用于測量地面控制點的GPS設備的精度;②透鏡校正;③在無失真圖像中定位地面控制點的精度。
2.2 游蕩持續時間和游蕩精度
使用無人機監測海洋劃定區時,需要重點考慮游蕩持續時間和游蕩精度。更長的游蕩持續時間可保證更長時間的連續數據采集。無人機的高游蕩精度獲得了穩定的視野,使其更容易查看用于校正程序的所有地面控制點。關于游蕩時間,分析實驗任務的日志數據可知,Y6在游蕩時平均消耗的功率低于AT6,因此Y6的游蕩持續時間比AT6更長。Y6的平均游蕩時間和最大游蕩時間分別為9.63 min 、11.61 min;AT6的平均游蕩時間和最大游蕩時間分別為5.72 min、8.97 min。以上時間主要取決于電池的類型和使用年限、飛行風格及環境條件。
為了分析2款無人機的游蕩精度,本文的研究主要集中在第A日和第B日的任務。在這些任務中,設定部署無人機飛往相同的預定義航路點,以獲得具有類似視野的近乎連續的數據集。定義一個觀察圈,無人機90%的時間都在觀察圈內徘徊(見圖2),結合圖3的無人機游蕩精度與平均風強的函數關系可知,AT6的徘徊半徑比Y6的更大。另一方面,與Y6相比,AT6的平均位置變化較小(除了第B日AT6的異常值)。這些結果表明,AT6中的GPS定位比Y6更準確,但Y6的位置保持校正增益比AT6更好。此外,通過將收集的風力數據與第A日和第B日的每一次無人機任務聯系起來,可以看出平均風力顯著影響無人機平均游蕩誤差的可變性(見圖3)。然而,根據以往的經驗,在高度為100 m左右、風速為10 m/s的情況下,保持所有必要的地面控制點相對容易。
3 航測試驗
旋翼無人機是一種靈活的海洋劃定區監測平臺,用于航測時需要大約1 h進行設置,包括地面控制點(GCP)的布設。旋翼無人機能在劃定區正上方或向海的固定位置徘徊數小時,并且能以良好的精度對獲得的中等空間分辨率和高解析度的圖像進行地理校正,非常適用于提取海洋劃定區的特征,以及在關鍵的空間和時間尺度上研究劃定區的具體用途。
單張正射照片能提供海洋劃定區的許多有價值的信息,一些示例分析則有助于試驗研究。對某一時期內的連續正射照片進行平均誤差分析,返回的“時間曝光圖像”通常用于沙洲形態和激流的研究。因此,無人機可以通過單張正射照片快速識別和測量風暴前和風暴后或颶風中重要的形態變化,也可以通過使用時間曝光圖像作為日常海灘安全工具,定位可能發生強撕裂流的危險區域。無人機獲得相似視野連續正射照片的能力為在不同空間和時間尺度上追求科學劃定區的運動學提供了新的應用。例如,在1 m和1 s的最小尺度上跟蹤單個波峰,提供一個波速和消散的定量空間模式。
單張正射照片提供的海洋劃定區域信息可以用來估算劃定區域的深度,該算法被用于固定翼無人機的航空圖像,與旋轉翼無人機的數據相比,可顯示估計的水深和實際數據之間的落差。該算法還可以評估波浪消散的空間模式,例如空間尺度為10 m、時間尺度為10 min時,可觀察沖浪區渦流的形成,該模式會影響激流運動學,從而影響海上航行的安全。在相同的規模上,著色劑的釋放產生了示蹤劑分散度和濃度以及渦流擴散率的估計值。在最大空間尺度為100~1 000 m、時間尺度為30~60 min的范圍內,著色劑的演變可用于研究物質在表層區的停留時間以及表層區和內陸架之間的物質交換。
4 結語
本文研究了旋轉翼無人機監測海洋劃定區的具體應用。無人機是一種靈活的測量平臺,可以從研究場地上方的固定位置收集高解析度的圖像。旋翼無人機獲得的連續正射照片滿足了在不同的空間尺度和時間尺度對劃定區運動學的精確追求,實現了對污染物擴散趨勢和海洋平流層變化趨勢的正確估計。
5 參考文獻
[1]鄭偉.基于視覺的微小型四旋翼飛行機器人位姿估計與導航研究[D].合肥:中國科學技術大學,2014.
[2]王千秋,李俊杰,駱毅. 基于無人機的模塊化環境監測系統[J].信息記錄材料,2022,23(10):106-109.
[3]劉勐,蘇俊武,薛洪文.無人機傾斜攝影在滑坡區域監測中的應用研究[J].自動化儀表,2023,44(9):87-91,96.
[4]盛希寧.基于四旋翼無人機的區域環境監測系統[J].物聯網技術,2021,11(4):25-26,30.
