
公路施工安全預警系統設計
2024-05-29 03:42:29楊遠洪賈曉坤
交通科技與管理 2024年9期
關鍵詞:物聯網
楊遠洪 賈曉坤
收稿日期:2024-03-14
作者簡介:楊遠洪(1987—),男,本科,高級工程師,研究方向:公路工程附屬設施施工及設計。
摘要 針對涉路施工中因來往車輛給施工人員造成的安全隱患,現有預警裝置多以警示燈、警戒牌、警戒線等形式出現,這些設施僅對來往車輛起到警示作用,施工工人卻無法即時感知。為此,文章提出了一種能使施工工人主動感知危險信號的預警系統。基于主動探測的設計原則,通過在施工道路養護區域前設置三級路障,并在路障上安裝測速裝置,利用ZigBee無線傳輸協議將速度信號傳遞給施工工人的馬甲,馬甲上的震動反饋模塊會根據速度值的大小決定是否震動報警以提醒工人;進一步,震動模塊采用PWM控制原理,會根據超速信號的大小調整震動強度。此外,文章結合實際情況中車輛剎車的狀況,以及駕駛員的反應時間,通過計算得出各級路障之間設置的距離以及每一級路障設置的最小速度閾值,建立了主動預警系統模型。該模型對降低涉路預警領域的施工工人危險系數和完善該領域的預警方法具有重要意義。
關鍵詞 涉路預警;主動探測;ZigBee;物聯網
中圖分類號 U231.3文獻標識碼 A文章編號 2096-8949(2024)09-0009-03
0 引言
隨著我國的綜合國力增強,各項基礎工程建設逐漸納入日程,交通工程施工建設是重要建設工程之一[1],而日常的養護和修補作業是其中的一大重要內容。涉路施工工程往往伴隨著道路的半運行化,來往的車輛可能會給施工人員造成極大的安全隱患。因此,涉路建筑工地的安全管理非常重要,需要采取一系列的安全保護措施。目前,工地上大多采取一些傳統的保護措施,比如施工工人戴安全帽,穿施工馬甲,施工工地附近拉警戒線,立警示路障等,但是這些措施只能被動地保護工人安全,當險情真正來臨時,對于正在進行施工養護作業的工人來說,其警示措施是很容易被忽視的。為了更好地保障工人安全,如何及時發現風險、預防風險是城市軌道交通項目施工安全風險管理研究的一個重要課題[2]。采用一種更加主動的預防措施,即基于施工工地主動預防的防護系統十分重要。該系統可以對來往車輛進行實時監測和預警,還可以將報警信號傳達到施工工人,從而最大限度地提高施工工人的安全保障水平。
1 主動預防系統的方案設計
施工工地主動預防系統主要由三級智慧路障防護區、智慧馬甲和無線傳輸系統組成。接近施工區域的汽車在抵達防護區時,智慧路障上的測速傳感器會測量到車速,并將此數值與預先設置的最小速度閾值進行比較并判斷,決定是否發出報警信號,以及是否將該信號通過無線傳輸系統傳輸給智慧馬甲,由智慧馬甲做出對應的響應,進而實現對施工工人做出警示,提高了施工工地的安全性。
1.1 智慧路障
智慧路障由測速傳感器、無線信號發射器和上面的警報燈組成。智慧路障設計為三級的防護區域,實現梯度預警,對車輛的不同車速和不同的制動效果做出不同等級的報警效果。具體來說,第一級防護區域設置在距離施工工地100 m處,最小速度閾值為100 km/h;第二級防護區域設置在距離施工工地50 m處,最小速度閾值為60 km/h;第三級防護區域設置在距離施工工地30 m處,最小速度閾值為40 km/h。
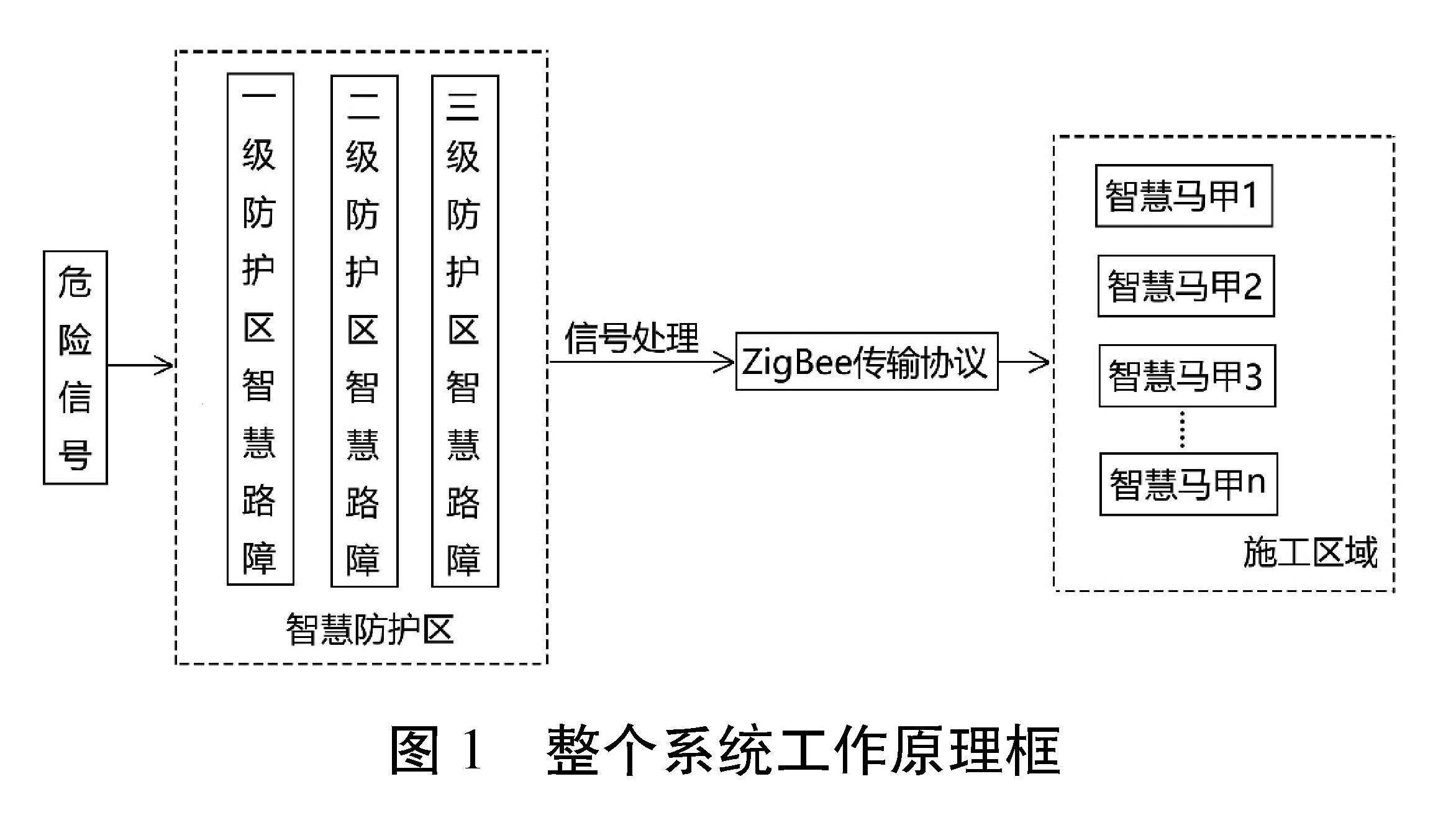
這樣設置的依據是:首先不計駕駛者的反應時間,設車輛的制動力為F,且有F 上述分析僅基于剎車過程,經統計數據顯示,普通人遇到險情的反應時間約為0.2 s。該文將遇到驚嚇后做出反應的時間考慮在內,即將反應時間延長至1 s,則制動距離為:,得到考慮駕駛員反應時間時不同車速下的制動距離。取剎車起始速度為40 km/h、60 km/h和100 km/h三種情況,可以得到制動距離的理論數值。在實際系統設置時,每級防護區路障距離施工工地的距離應大于該理論值,并留有一定的余量。因此,可以得到防護區距離工地的距離和最小速度閾值。 每一級防護區的路障對抵達該防護區的車輛速度進行捕獲,將捕獲后的車速與該級防護區所設置的最小速度閾值進行比較,如果大于該防護區的最小速度閾值,那么就會啟動該路障上面設置的警報燈,警報燈閃爍對該超速車輛進行提示。同時,智慧馬甲通過無線接收方式接收到報警信號,并做出響應。 下面對三級防護區是否執行動作并且發送信號進行討論: (1)當超過第一級防護區設置的最小速度閾值時,該級防護區執行動作,路障警報燈閃爍并發送信號給智慧馬甲,使智慧馬甲做出報警動作。反之,該級防護區不執行動作。 (2)當車輛的車速滿足第一級動作的條件后,如果滿足第二級防護區的動作條件,第二級防護區的路障警報燈閃爍并發送信號給智慧馬甲。反之,此級路障報警燈不閃爍,但仍發送信號給智慧馬甲,使智慧馬甲取消報警動作。 (3)當車速滿足第一、二級防護區設置的最小速度閾值后,將來到第三級防護區,若滿足第二級防護區的動作條件,則第三級防護區的路障警報燈閃爍并發送信號給智慧馬甲。反之,此級路障報警燈不閃爍,但仍發送信號給智慧馬甲,使智慧馬甲取消報警動作。 1.2 智慧馬甲 智慧馬甲由震動反饋模塊、報警指示燈和報警蜂鳴器組成。震動反饋模塊設置在肩部、肩胛骨處,報警蜂鳴器設置在肩部,報警指示燈設置在腹部以及對應后背的位置。智慧馬甲具體工作原理對應于智慧路障發送信號的三種狀態[3]: (1)第一種狀態,只有智慧馬甲上的震動反饋模塊執行動作。 (2)第二種狀態,智慧馬甲上的震動反饋模塊和報警指示燈同時作用。 (3)第三種狀態,智慧馬甲上的震動反饋模塊、報警指示燈以及報警蜂鳴器同時作用。 需要特別說明的是,在智慧馬甲上的三種報警狀態中都有震動反饋模塊,此模塊的報警邏輯非簡單的數字量報警,報警的控制邏輯是基于PWM原理進行工作。簡單來說,車速越高,震動反饋的強度越大。 PWM即脈沖寬度調制原理,是一種用于控制調節電子設備輸出的技術,通過改變占空比不同的矩形脈沖寬度控制輸出值。該智慧馬甲上所用的震動反饋模塊支持通過該原理對震動強度的調節。具體來說,通過改變單片機IO口輸出脈沖的寬度調節電壓輸出,對應不同的震動強度。控制邏輯為:當智慧路障反饋速度信號給智慧馬甲時,智慧馬甲上的處理器會區分此信號,判斷該信號來自哪一級防護區,該區分方式是通過發送數據的從機地址進行實現;其次處理器會將該速度值與預先設定好的最小速度閾值作比較,并進行數字運算,具體為,將實時速度值同最小速度閾值做差,并將此差值與最小速度閾值的一半作商,得到的結果即為震動模塊的占空比,即占空比。同最小速度閾值的一半作商的目的是為了放大超速信號,使系統面對超速的反應更加靈敏。 1.3 無線傳輸系統 該系統的無線通信技術使用了ZigBee協議,該技術是最近發展起來的一種短距離無線通信技術,功耗低,被業界認為是最有可能應用在工控場合的無線方式[4]。該協議相比其他無線傳輸協議的優點是功耗低、抗干擾力強、傳輸速度快、實時性強、自組網能力強。雖然相較于藍牙和WiFi,該協議傳輸數據的速率較低,但是在本系統的應用場景下,傳輸的數據量很小,在傳輸速率上體現不出較大的差異性。 具體的通信過程為:ZigBee模塊協調器將智慧路障的ZigBee模塊和智慧馬甲上的ZigBee模塊進行組網,智慧路障上的測速傳感器首先通過中央處理器對檢測到的速度數據進行處理,再決定是否發送給智慧馬甲;若智慧馬甲收到數據,再經過中央處理器對數據做處理,最后作出對應的動作。 2 軟硬件設計 2.1 硬件部分 考慮應用場景在戶外,所以該系統的供電采用光儲聯合供電。在白天太陽輻射充裕時,由于光生伏打效應在光伏電池產生電壓,通過DC/DC進行降壓轉換,一部分電壓加載在一定的負載上產生輸出電流給系統供電,另一部分電能則輸入到電池形成充電電壓。在夜晚沒有太陽輻射時,電池作為主要供電來源,產生放電電流[5]。該設計降低了功耗與后期維護成本。 該系統的硬件部分分為兩大部分,第一部分是智慧路障,第二部分是智慧馬甲,兩者均采用單片機作為控制中心,都由光儲聯合供電。此外,智慧路障由ZigBee無線傳輸模塊、報警燈和速度傳感器組成。智慧馬甲由ZigBee無線傳輸模塊、震動模塊、蜂鳴器和報警燈組成。 整個主動預防系統的工作原理大致為:超速信號被設置在離施工工地具有一定距離的智慧防護區進行提前識別,通過ZigBee協議將處理后的信號發送給正在施工工地作業的工人身上的智慧馬甲,對不同程序的危險信號能夠做出不同的報警提示,實現讓施工工人預先得知危險、提前撤離危險區域、提高施工安全性的目的。整個系統工作原理如圖1所示。 2.2 軟件部分 施工工地主動預防系統主程序的流程圖如圖2所示,該系統上電后首先進行裝置初始化,智慧路障上的速度傳感器采集速度數據,并在中央處理器里逐級決定是否產生報警信號,并將此信號傳輸給智慧馬甲。若決定發送報警信號,那么再對通信是否故障進行判斷,若通信沒有故障,則速度值寫入發送緩存區,然后由ZigBee模塊發送緩存區的數據,同時智慧路障上的報警燈閃爍。若低于最小速度閾值,在檢查沒有通信故障后,再由單片機逐級決定是不發送信號還是發送震動減弱信號。 施工工地主動預防系統的子程序流程圖如圖3所示。在智慧馬甲接收數據前,首先要判斷是否存在通信故障,如果通信存在故障那么智慧馬甲產生故障報警,需要進行設備調試。相反,智慧馬甲可以接收來自智慧路障的報警信號,再進行相應的報警任務。 3 結語 該文設計了一種基于施工工地主動預防的保護系統,由分布在智慧路障和智慧馬甲上的中央處理器和無線通信模塊組成。系統通過測量接近施工工地的車輛速度,由ZigBee無線傳輸模塊發送和接收車速,最后通過中央處理器對不同的車輛做出多樣化的報警提示信號,進而實現對施工工人在面對車禍險情時的警示。此外,系統還具有通信自檢、故障報警等功能,是一套低成本、智能化、可有效提高施工工人安全性的主動預防系統。 參考文獻 [1]代華北. 軌道交通工程施工安全監控管理信息系統設計與應用研究[J]. 居業, 2019(2): 25+29. [2]商兆濤, 尹志凱, 張紅彬, 等. 城市軌道交通施工安全風險預警體系研究[J]. 河南科學, 2020(5): 740-748. [3]王軍雷, 應世杰, 李百川. 高速公路汽車追尾預警系統的開發研究[J]. 安全與環境學報, 2006(4): 122-125. [4]周怡颋, 凌志浩, 吳勤勤. ZigBee無線通信技術及其應用探討[J]. 自動化儀表, 2005(6): 5-9. [5]張純杰, 趙志剛, 高溥. 光儲聯合供電數據采集系統的設計及數據預處理[J]. 電子設計工程, 2014(20): 131-134+138.
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
