對智能無人船自動采樣系統的探索之旅
2024-05-29 00:00:00周澄宇
發明與創新·中學生 2024年6期
在學習無人船原理、傳感器類型等知識后,我了解到根據不同的功能,市面上的無人船可分為水質監測船、水情巡航船等。然而,它們在提高無人船巡航監測效率、排查復雜水污染情況等方面存在局限性。
因此,我有了一個想法:設計一個智能無人船自動采樣系統,搭載多個傳感器,讓其同時實現水質監測、異常報警、污染物采樣留樣等功能。為此,我開啟了智能無人船自動采樣系統的探索之旅。
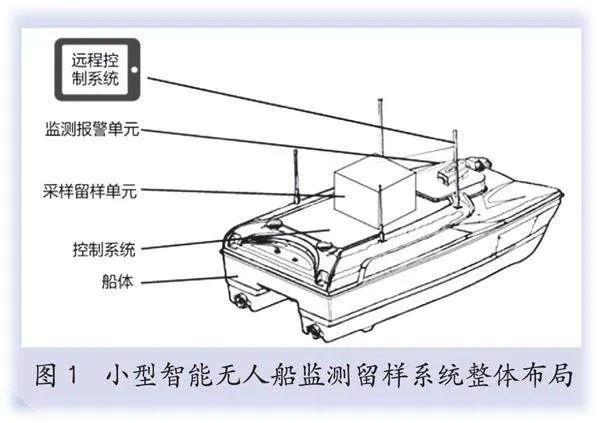
設計初期,我上網查找了大量資料,還聽取了一些專題講座,了解到無人船面臨的首要問題是如何實現自主巡航和精準定位。結合資料調研,我第一個設計思路是采用融合GPS、北斗衛星導航和慣性測量單元組合的導航方式,耦合遠程控制端,集成小型智能無人船監測留樣系統。
只需將小型智能無人船放在河岸或湖岸邊,通過移動終端設置巡航軌跡,無人船按照指定線路到達監測點監測水質,同時將數據傳回控制端,與空間經緯度結合展示形成水質空間分布熱力圖,對水質超標或突變的點位發出自動采樣留樣指令,便于進一步分析取證。
在該系統的測試階段,我發現了以下問題:無人船在水中航行時,針對某一處水域的停留時間較短,船底的傳感器反應不及時,在水質較差的位置不能將信號傳輸給中控系統開啟水泵抽水;無人船在運行過程中會出現擱淺的現象,不能快速、自主避讓水域內的石塊等障礙物;開啟水泵時,水泵抽水時間較短,采集的水樣易濺出,與系統設定的采樣量出入較大;傳感器安裝在船底,線路浸沒在水中,易出現短路等故障。
為解決以上問題,我調整了無人船自動巡航中的航行速度,更換了靈敏度更高的水質傳感器,僅將傳感器的感應頭浸沒在水中,采用Python編制障礙物識別算法和動態避障算法,實現對障礙物的繞行。又將抽水泵換成蠕動泵,更改蠕動泵的轉數,確保水樣在采集過程中不會濺出采樣瓶。
重新組裝完成后,我將無人船置于柘皋河河岸,打開開關,在平板電腦上設定無人船巡航的軌跡、巡航時間后,無人船開始運行。無人船按既定路線巡航,在無人工干預的情況下實時監測水質,形成水質空間分布熱力圖,在水質異常點位自動開啟采樣泵,并存于留樣中。經過橋墩時,無人船也能自動繞過橋墩駛向前方的待監測地點。測試成功了!
在這次的設計實踐中,我不僅主動學習了無人船技術原理、導航和定位技術以及Python程序語言,還學會了如何理性面對困難,如何在實踐中不斷創新——創新不僅是解決問題的關鍵,更是推動科技進步的動力。在不斷嘗試新的思路和方法后,我最終實現了智能無人船自動采樣系統的優化。
在未來的學習中,我將繼續秉持這種創新精神,不斷探索,突破自我。我相信,隨著科技的進步和應用的深化,智能無人船自動監測采樣系統將在水質監測和水環境治理中發揮越來越重要的作用。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
表面工程與再制造(2019年6期)2019-08-24 06:40:04
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
電子制作(2018年14期)2018-08-21 01:38:16