國外空中加油受油機(jī)操縱品質(zhì)試飛技術(shù)綜述
2024-05-30 10:35:02李雅靜
科技創(chuàng)新與應(yīng)用 2024年15期

作者簡介:李雅靜(1985-),女,碩士,高級工程師。研究方向?yàn)轱w行品質(zhì)試飛。
DOI:10.19981/j.CN23-1581/G3.2024.15.007
摘? 要:針對飛機(jī)執(zhí)行軟式空中加油任務(wù)時飛行品質(zhì)試飛及評價方法缺失的問題,搜集國外文獻(xiàn),結(jié)合實(shí)際空中加油試飛,分解空中加油任務(wù)得到加油不同階段飛行品質(zhì)關(guān)注重點(diǎn)。針對性提出加油任務(wù)相關(guān)的操縱品質(zhì)試飛及評價方法,改進(jìn)加油模態(tài)飛行控制律,改善飛行品質(zhì)、尾流場操縱品質(zhì)檢查、空中加油任務(wù)閉環(huán)操縱品質(zhì)評價等,對我國空中加油飛行品質(zhì)試飛及評價具有較大參考價值。
關(guān)鍵詞:軟式空中加油;操縱品質(zhì);尾流場試驗(yàn);閉環(huán)任務(wù)品質(zhì)評價;受油機(jī)
中圖分類號:V212.1? ? ? 文獻(xiàn)標(biāo)志碼:A? ? ? ? ? 文章編號:2095-2945(2024)15-0029-05
Abstract: In response to the issue of the lack of flight quality test and evaluation methods for aircraft performing soft aerial refueling missions, it is necessary to collect foreign literature and combine it with actual aerial refueling test flights. By breaking down the aerial refueling mission, the focus points for flight quality during different refueling stages can be identified. Specific methods for handling quality test and evaluation related to the refueling mission can be proposed, such as improving the flight control laws for the refueling mode to enhance flight quality, conducting wake field handling quality checks, and developing a closed-loop handling quality evaluation for the aerial refueling mission. These measures are of significant reference value for the test and evaluation of flight quality in aerial refueling in China.
Keywords: soft aerial refueling; handling qualities; wake field experiment; closed-loop mission quality evaluation; receiver aircraft
空中加油受油機(jī)飛行品質(zhì)是決定加油任務(wù)能否順利完成的關(guān)鍵因素。戰(zhàn)斗類飛機(jī)作為受油機(jī),由于飛機(jī)本身機(jī)動特性較強(qiáng),完成受油任務(wù)相對容易。而對于大型受油機(jī),如運(yùn)輸類飛機(jī),機(jī)動能力差是完成空中受油任務(wù)的最大障礙,要設(shè)計出具有怎樣的機(jī)動能力的飛機(jī)才能夠滿足空中受油任務(wù)是大型飛機(jī)設(shè)計試驗(yàn)中面臨的難題[1]。目前中華人民共和國國家軍用標(biāo)準(zhǔn)(簡稱“國軍標(biāo)”)缺乏對空中受油飛行品質(zhì)的分析手段和經(jīng)驗(yàn),美軍標(biāo)的MIL-STD-1797A中只有少量的加油對接任務(wù)[2],我國國軍標(biāo)GJB 185—86《有人駕駛飛機(jī)(固定翼)飛行品質(zhì)》中對于加油任務(wù)只定義了A種飛行階段中部分開環(huán)指標(biāo)[3],難以對現(xiàn)有飛機(jī)受油飛行品質(zhì)進(jìn)行準(zhǔn)確分析,不能很好地指導(dǎo)飛行品質(zhì)設(shè)計及面向加油任務(wù)的飛行試驗(yàn)設(shè)計。
飛機(jī)在加油過程中的操縱性、穩(wěn)定性評價十分重要,是關(guān)乎加油成敗的最關(guān)鍵因素,亟待研究。本文通過研究國外相關(guān)試飛及評價技術(shù),總結(jié)得到能指導(dǎo)后續(xù)空中加油任務(wù)的飛行品質(zhì)試飛方法和評價方法。
空中加油時受油機(jī)需要進(jìn)行的飛行品質(zhì)試飛內(nèi)容主要包括3個方面:一是受油包線確定及操縱特點(diǎn)檢查;二是尾流場影響檢查;三是對接及保持時閉環(huán)飛行品質(zhì)評定。本文將從這3個方面開展受油機(jī)執(zhí)行加油任務(wù)飛行品質(zhì)研究。
1? 大型受油機(jī)加油飛行控制系統(tǒng)改進(jìn)
為了提升飛機(jī)作為受油機(jī)執(zhí)行受油任務(wù)的飛行品質(zhì),多數(shù)帶控制增穩(wěn)系統(tǒng)的飛機(jī)或是電傳飛機(jī)會適應(yīng)性更改控制律。受油機(jī)進(jìn)行受油一般有如下控制要求[4-5]。
一是單獨(dú)的加油狀態(tài)開關(guān);
二是增加穩(wěn)定性,克服加油機(jī)氣流干擾;
三是在一定范圍和時間內(nèi),能夠保持穩(wěn)定的姿態(tài)角;
四是加油過程中,受油機(jī)一旦遭遇敵情或險情,來不及斷開加油狀態(tài)開關(guān)時,可通過增大駕駛桿的操作量恢復(fù)對飛機(jī)的正常操縱。
參考文獻(xiàn)[6]介紹了C-17A運(yùn)輸機(jī)作為受油機(jī)的飛行控制系統(tǒng)的最新更新。飛行控制升級是針對過去飛行員在完成空中加油任務(wù)方面存在一些困難而進(jìn)行的,旨在通過改善飛機(jī)響應(yīng)特性和可預(yù)測性來提高任務(wù)期間的飛機(jī)操縱品質(zhì),同時盡量減少飛行員誘發(fā)振蕩。
1.1? 三軸操縱改進(jìn)
為改善C-17A在空中加油過程中的操縱品質(zhì)和反應(yīng)特性,對空中加油模式的傳統(tǒng)控制律進(jìn)行了修改,以減少俯仰、滾轉(zhuǎn)、推力軸的關(guān)鍵飛行員飛行頻率的動態(tài)時延。3個軸都采用了復(fù)雜、獨(dú)特的非線性控制律。空中加油模式控制律設(shè)計修改的目標(biāo)包括提高操縱品質(zhì)、降低飛行員誘發(fā)振蕩(PIO)敏感性、減少對接斷開次數(shù)、更容易接近與對接、降低受油機(jī)與加油機(jī)機(jī)組人員的工作負(fù)荷水平和降低飛行事故的可能性,并縮短了訓(xùn)練時間和飛行小時,用于精確操縱、空中加油跟蹤任務(wù)。俯仰軸通過升降舵控制執(zhí)行精確的俯仰角跟蹤。橫向利用差動副翼精確跟蹤滾轉(zhuǎn)角和航向變化。這有助于飛行員更容易、更精確地控制方位角的微小變化。對偏航軸空中加油模式控制律進(jìn)行了優(yōu)化,以最小化轉(zhuǎn)彎時的側(cè)滑量。
1.2? 推力軸改進(jìn)
傳統(tǒng)的C-17A空中加油模式?jīng)]有控制律來幫助飛行員控制相對于加油機(jī)的前/后位置。飛行員通過調(diào)節(jié)發(fā)動機(jī)電子計算機(jī)使用的節(jié)流閥改變發(fā)動壓力比(EPR),從而改變推力。發(fā)動機(jī)響應(yīng)中存在大量的時間延遲,這導(dǎo)致飛機(jī)向前向后移動的操縱品質(zhì)差,如飛行員給出 3級品質(zhì)和嚴(yán)重的PIO趨勢評價。飛機(jī)推力響應(yīng)延遲大,需要進(jìn)行更改,使用小幅襟翼、擾流板實(shí)現(xiàn)快速減速,利用小幅度的氣動增阻,實(shí)現(xiàn)對飛機(jī)前后移動的精確跟蹤,新的推力軸(前/后平移運(yùn)動)控制律的主要特點(diǎn)是為了改善傳統(tǒng)飛機(jī)的操縱品質(zhì)。
1.3? 改進(jìn)結(jié)果
飛行試驗(yàn)過程中,飛行品質(zhì)及PIO評價使用的是庫伯哈珀評分和PIOR評分準(zhǔn)則,飛行試驗(yàn)結(jié)果是總體為1級良好的操縱品質(zhì),飛行員沒有進(jìn)一步改進(jìn)的要求。由于對俯仰、滾轉(zhuǎn)、推力軸進(jìn)行了廣泛、復(fù)雜、創(chuàng)新的控制律更改,所有設(shè)計目標(biāo)都得到了滿足。飛行員感覺到幾乎沒有延遲,這使得響應(yīng)特性在所有3個軸上都比傳統(tǒng)的更可預(yù)測和可控,且沒有PIO趨勢。
2? 國外軟式加油操縱品質(zhì)試飛技術(shù)
2.1? 加油包線確定
加油機(jī)的加油包線和受油機(jī)加油包線重疊的部分,即為兩型飛機(jī)加油包線,主要是高度速度包線,一般情況下,速度越大,錐套越穩(wěn)定,需要關(guān)注受油機(jī)在加油機(jī)尾流中的加速能力,即發(fā)動機(jī)推力是否足夠;速度越小,錐套穩(wěn)定性越差,不利于加油對接,具體包括以下2點(diǎn)。
第一,確定完成空中加油的飛行高度和速度范圍,應(yīng)根據(jù)在加油開始和結(jié)束階段加油機(jī)需用和可用推力的曲線與受油機(jī)類似曲線的綜合分析來進(jìn)行。利用剩余推力,2架飛機(jī)以初始的和接近最后的重量完成對接時能進(jìn)行足夠的機(jī)動飛行,并且在加油過程中萬一出現(xiàn)脫開時也能進(jìn)行機(jī)動飛行。
第二,選擇能進(jìn)行空中加油的高度、速度范圍的第2個條件是“加油管-加油錐套”系統(tǒng)在氣流中的穩(wěn)定性。利用伴隨飛機(jī)借助于攝影和觀察加油管在氣流中的動態(tài)的方法,評定出“加油管-加油錐套”系統(tǒng)的穩(wěn)定性。這樣的伴隨飛機(jī)也可以是進(jìn)行試驗(yàn)用的受油機(jī)。同時檢查加油機(jī)自動駕駛儀調(diào)整的正確性。如果自動駕駛儀的縱向通道調(diào)整得不好,則會引起加油錐的上下擺動,因而很難或者甚至不可能在空中與其對接。
2.2? 受油機(jī)受尾流場影響試飛方法
尾流測量飛行試驗(yàn)的目的是確定每個加油位置后面的安全加油區(qū)范圍,評估加油機(jī)的流場及可能對安全或加油能力產(chǎn)生負(fù)面影響的任何相互作用。
尾流場探索順序[7]適用于機(jī)翼吊艙和中心線加油平臺。是在不同的縱向距離探索尾流場影響可接受的方框區(qū)域。其中探索程序確定初始位置,從初始位置向上、向左、向右區(qū)域開展尾流特性探索。如為確定加油機(jī)附近是否存在可接受的尾跡湍流區(qū)域,以便執(zhí)行空中加油任務(wù),評估了加油機(jī)對其后面位置的2架受油機(jī)的影響[7]。試驗(yàn)結(jié)果表明在測試的區(qū)域和條件下,加油機(jī)中心線和翼尖位置的尾流中存在一個受油機(jī)飛行品質(zhì)可接受的區(qū)域,以便受油機(jī)執(zhí)行空中加油任務(wù),同時也給出了加油過程中尾流場檢查飛行的試飛流程。
2.2.1? 評估方法
會合后,受油機(jī)移動到右側(cè)或左側(cè)觀察位置,該位置至少為一個加油機(jī)機(jī)翼長度,略低于加油翼尖。在加油機(jī)中心線的尾部和每個翼尖的加油吊艙位置進(jìn)行試驗(yàn)。評估的位置包括預(yù)對接位置、輸油區(qū)、非輸油區(qū)。受油機(jī)在每個位置進(jìn)行“方框評估”,如圖1所示。飛行員通過操縱品質(zhì)評級(HQR)評估了其在“方框”中的每個點(diǎn)保持±1.5 m(足夠的)或±0.9 m(需要的)穩(wěn)定飛機(jī)位置的能力,方框邊界定義為當(dāng)?shù)竭_(dá)HQR 7或需要過大的橫向或方向控制位移來保持位置或者飛機(jī)配平在任何軸上達(dá)到飽和。記錄如下信息。
1)受油機(jī)和加油機(jī)的指示空速、高度、重量;
2)加油機(jī)機(jī)組人員,評估空氣湍流;
3)受油機(jī)HQR和定性評論;
4)受油機(jī)飛機(jī)副翼、方向舵、俯仰配平(如適用)及控制輸入的數(shù)值/方向和功率要求。
圖1? 機(jī)翼尾流場探索方框1
2.2.2? 具體測試程序
選擇不同高度、不同速度、不同加油機(jī)重量狀態(tài)下,以左翼預(yù)對接位置為例,進(jìn)行如下程序。
左側(cè)機(jī)翼的預(yù)對接位置定義為加油機(jī)機(jī)翼后緣30.5 m后,與左側(cè)吊艙加油管線一致,并有12.2 m的下降距離。一旦建立在預(yù)對接位置,受油機(jī)將按照如下所述執(zhí)行方框評估。
1)爬升9.1 m(低于加油機(jī)機(jī)翼3.0 m),然后返回到預(yù)對接位置。
2)向左移動3.4 m(這使受油機(jī)與左翼尖對齊),然后返回到預(yù)對接位置。
3)向預(yù)對接位置右側(cè)移動3.4 m,并返回到預(yù)對接位置。
4)向預(yù)對接位置左側(cè)移動3.4 m,爬升9.1 m,穩(wěn)定,下降9.1 m,然后返回預(yù)對接位置。
5)向預(yù)對接位置右側(cè)移動3.4 m,爬升9.1 m,穩(wěn)定,下降9.1 m,返回預(yù)對接位置。
6)通過向左移動3.4 m,爬升9.1 m,穩(wěn)定,向右移動3.4 m,穩(wěn)定,向右移動額外3.4 m,穩(wěn)定,下降9.1 m,通過向左移動3.4 m回到預(yù)對接位置,形成一個矩形方框。
2.2.3? 評價方法及試驗(yàn)中止標(biāo)準(zhǔn)
1)操縱品質(zhì)評級(HQR)用于評估與定位和保持受油機(jī)在加油機(jī)后方穩(wěn)定位置相關(guān)的性能和工作量。飛行員HQR與飛行員自身的可接受性評估有關(guān)。如果遇到飛行員誘發(fā)振蕩(PIO),則使用PIO評級量表。飛行員的任務(wù)是在加油機(jī)后面的不同位置保持±1.5 m(期望的)或±0.9 m(足夠的)的穩(wěn)定飛機(jī)位置。
2)在加油機(jī)尾流內(nèi)或附近的所有機(jī)動過程中,受油機(jī)的飛行員注意到是否存在操縱品質(zhì)異常。測試點(diǎn)中止標(biāo)準(zhǔn)為HQR評分7,或者當(dāng)需要過大的橫向或方向控制位移來保持位置,或者當(dāng)飛機(jī)配平在任何軸上飽和。
3)從加油機(jī)對稱面到翼尖的水平截面范圍,檢查受油機(jī)相對于加油機(jī)的允許機(jī)動空域。在確定水平截面空域的過程中,由于加油機(jī)尾流對受油機(jī)機(jī)翼的影響,受油機(jī)會產(chǎn)生滾轉(zhuǎn),所以受油機(jī)的飛行員應(yīng)確定克服此種滾轉(zhuǎn)所需的操縱機(jī)構(gòu)行程。
2.3? 閉環(huán)任務(wù)飛行品質(zhì)試飛及評價
為評估縱向閉環(huán)操縱品質(zhì)、完善MIL-STD-1797A飛行品質(zhì)標(biāo)準(zhǔn),美國航空航天局計劃對3個空中加油任務(wù)關(guān)聯(lián)的動作進(jìn)行分析研究[8],目的是確定評估飛機(jī)閉環(huán)空中加油任務(wù)操縱品質(zhì)的最佳任務(wù)。
測試計劃評估了3項候選任務(wù):對接任務(wù),錐套跟蹤任務(wù),錐套瞄準(zhǔn)指向任務(wù)。測試中,對3項任務(wù)進(jìn)行了評估比較,確定錐套跟蹤任務(wù)被認(rèn)為是評估閉環(huán)操縱品質(zhì)的最佳方法。
具體任務(wù)描述如下。
2.3.1? 對接任務(wù)
1)任務(wù)描述:①從預(yù)對接位置(在錐套后面3.0~4.6 m處,加油探頭垂直和水平對齊)確定3~5節(jié)的接近率,并嘗試對接。如果連接成功,穩(wěn)定約30 s,然后建立3~5節(jié)的分離率,脫離并返回預(yù)對接位置。重復(fù)該任務(wù)至少6次,然后給出Cooper-Harper(CH)評分和飛行員誘發(fā)振蕩(PIO)等級。②從4.6 m處接近,嘗試對接。如果接近率超過5節(jié),則中止嘗試。如果探管尖端通過錐套的外邊緣或出現(xiàn)危險情況,則中止對接嘗試并返回預(yù)對接位置。由于湍流引起的瞬時錐套偏移導(dǎo)致的中止嘗試將不占試驗(yàn)次數(shù)。
2)性能標(biāo)準(zhǔn):①標(biāo)準(zhǔn)1期望的。在至少50%的嘗試中,在不接觸錐套邊緣的情況下進(jìn)行對接。沒有PIO趨勢。②標(biāo)準(zhǔn)2足夠的。在至少50%的嘗試中完成對接。
2.3.2? 錐套跟蹤任務(wù)
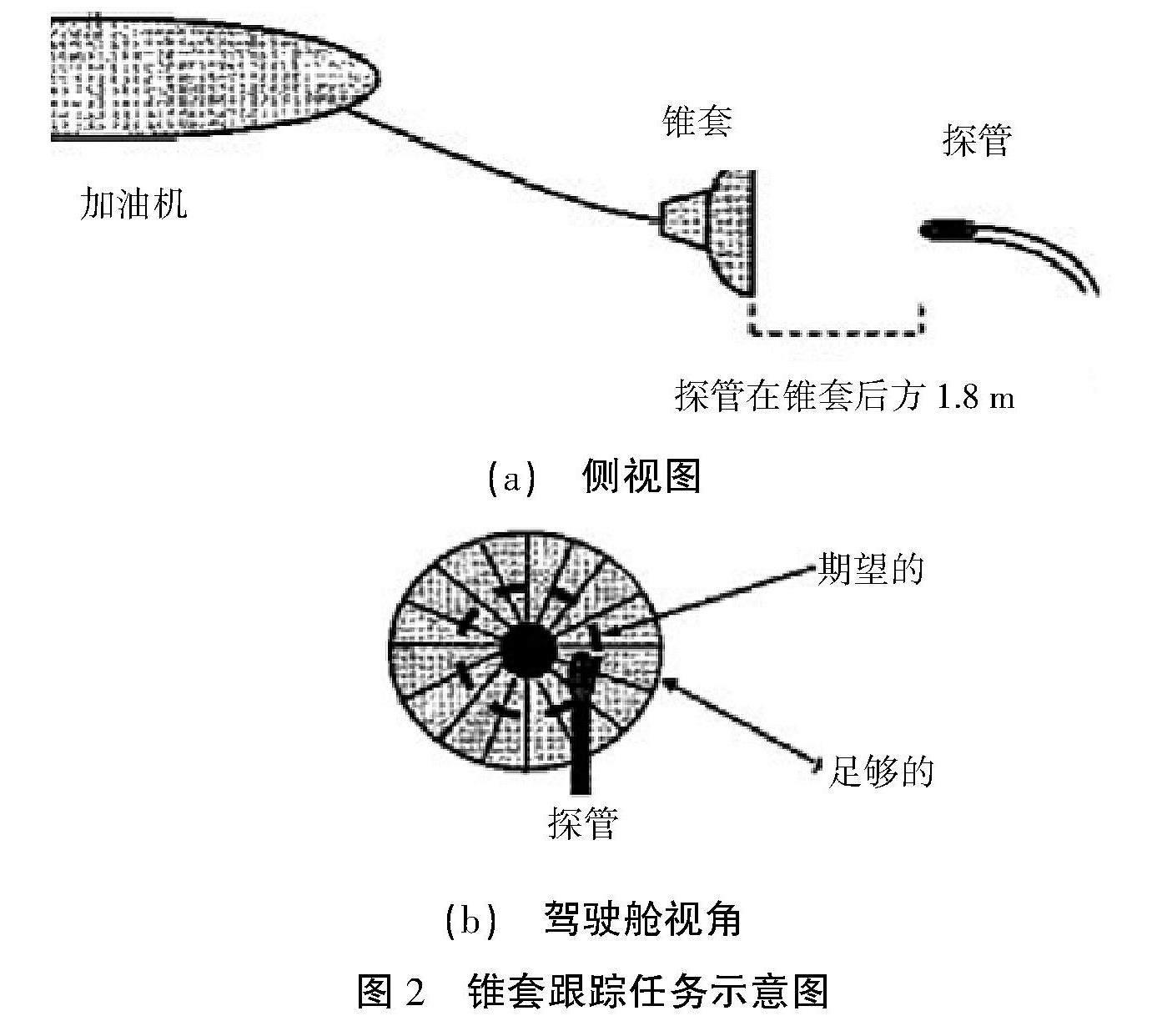
1)任務(wù)描述(圖2):將探頭穩(wěn)定在錐套后1.8~3.0 m處。從這個位置開始,將探頭保持在錐套邊緣內(nèi)至少20 s,使用錐套的中心作為瞄準(zhǔn)點(diǎn)。重復(fù)這項任務(wù)至少3次。給出CH評分和PIO評級。
(b)? 駕駛艙視角
圖2? 錐套跟蹤任務(wù)示意圖
2)性能標(biāo)準(zhǔn):①標(biāo)準(zhǔn)1期望的。將探頭保持在目標(biāo)位置的±1/2個錐套半徑范圍內(nèi),包括垂直和橫側(cè)向。不得與錐套接觸(除非錐套突然移動是由油輪或外部影響引起的),沒有PIO趨勢。②標(biāo)準(zhǔn)2足夠的。將探頭保持在目標(biāo)位置的一個錐套半徑內(nèi),垂直和橫向。不得與錐套接觸(除非錐套突然移動是由加油機(jī)或外部影響引起的)。
2.3.3? 錐套瞄準(zhǔn)任務(wù)
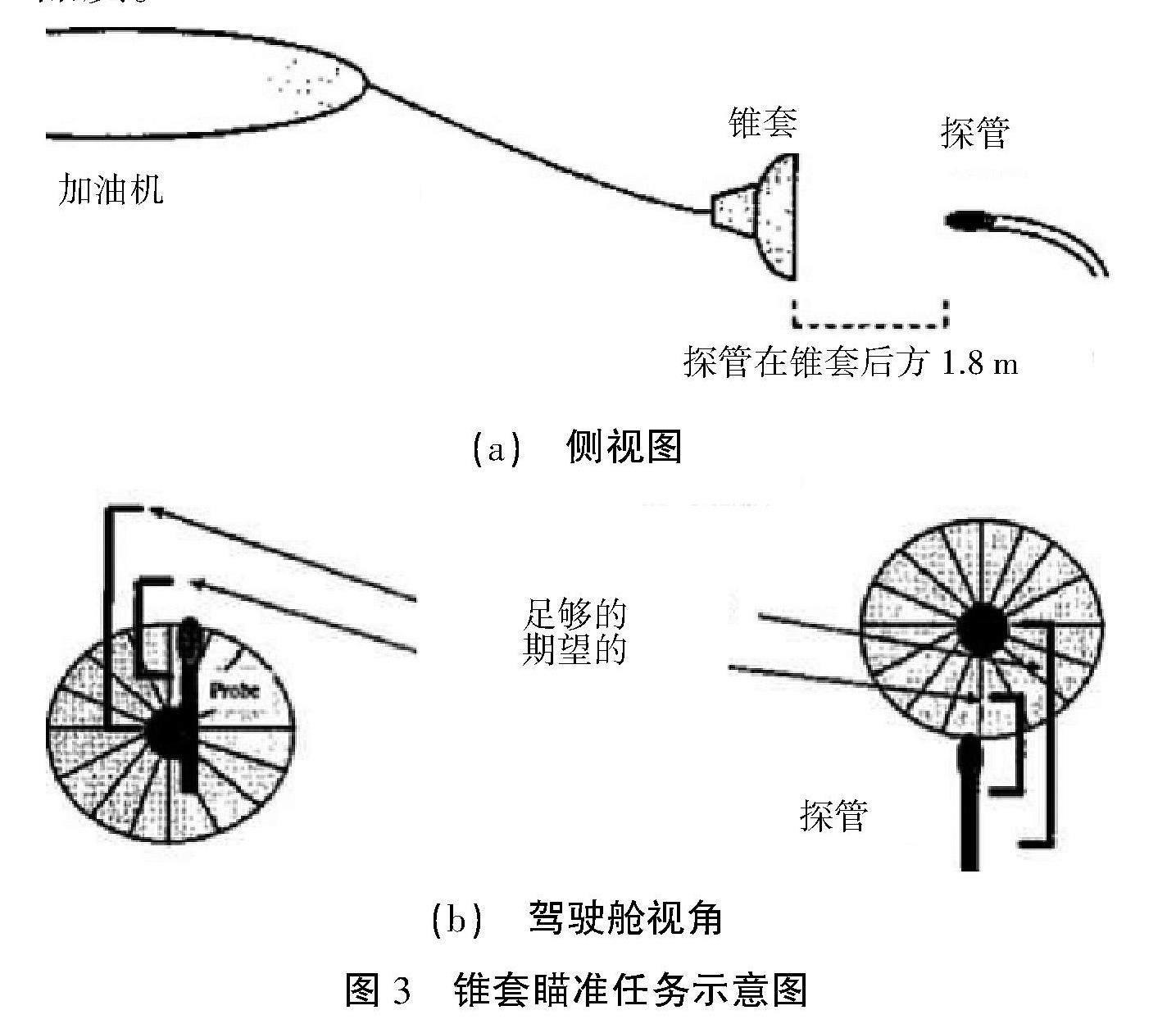
1)任務(wù)描述:在探頭穩(wěn)定在距離錐套1.8~3.0 m的位置后,快速(在1 s內(nèi))將錐套重新定位在錐套的頂部邊緣,并穩(wěn)定5 s。然后,快速(在2 s內(nèi))將探頭重新定位在錐套底部邊緣,并穩(wěn)定5 s。最后,快速將探頭重新定位到錐套中心(1 s內(nèi))。給出CH評分和PIO評級。
2)性能標(biāo)準(zhǔn):①標(biāo)準(zhǔn)1期望的。將探頭保持在所需位置的±1/2個錐套半徑范圍內(nèi),包括垂直和橫側(cè)方向。不得與錐套接觸(除非錐套突然移動是由加油機(jī)或外部影響引起的)。沒有PIO趨勢。②標(biāo)準(zhǔn)2足夠的。將探頭保持在所需位置的±1個錐套半徑范圍內(nèi),包括垂直和橫側(cè)方向。不得與錐套接觸(除非錐套突然移動是由加油機(jī)或外部影響引起的)。
經(jīng)過不同飛行員執(zhí)行動作后進(jìn)行打分和任務(wù)評述,錐套跟蹤任務(wù)被認(rèn)為是評估閉環(huán)操縱品質(zhì)的最佳方法,但由于其無法給出距錐套1.5 m范圍內(nèi)可能遇到的頭波效應(yīng)的情況,因此,應(yīng)結(jié)合錐套跟蹤任務(wù)和加油對接任務(wù),以全面評估空中加油任務(wù)中的閉環(huán)操縱品質(zhì)。
(b)? 駕駛艙視角
圖3? 錐套瞄準(zhǔn)任務(wù)示意圖
3? 空中加油過程中的品質(zhì)評價
空中加油過程飛行品質(zhì)試飛要分階段進(jìn)行,具體包括如下4個過程。
3.1? 遠(yuǎn)距到近距編隊飛行時
飛行員要確定加油對接的機(jī)動過程中動力裝置的工作狀態(tài)和發(fā)動機(jī)所需的轉(zhuǎn)速變化范圍,飛行員從初始狀態(tài)向加油錐套靠近,以便評定出加油錐套對受油機(jī)機(jī)身氣流特性的影響,同時評定受油機(jī)機(jī)身前部對加油錐穩(wěn)定性的影響。
遠(yuǎn)距到近距直到對接過程中檢查受油機(jī)受尾流場影響。
3.2? 在靠近加油錐套的密集編隊過程中
評價操縱特性,例如對于有些大型飛機(jī),利用小的往復(fù)操縱來操縱受油機(jī),尤其是在俯仰系統(tǒng),否則可能會引起受油機(jī)縱向擺。
當(dāng)空中加油系統(tǒng)的飛行試驗(yàn)在雙人駕駛的飛機(jī)上進(jìn)行時,則應(yīng)該明確飛行員之間的責(zé)任分工,并準(zhǔn)備好必要的指令和報告,以便保證機(jī)組人員之間有最大程度上的相互理解和協(xié)同動作。
3.3? 在預(yù)對接到對接過程中
受油機(jī)飛行員要評價對接過程中小幅操縱飛機(jī)時飛機(jī)的PIO特性,可以使用閉環(huán)任務(wù)飛行品質(zhì)及評價方法。
關(guān)注油門操縱對飛機(jī)3軸的影響,因?yàn)椴煌愋偷氖苡蜋C(jī)在靠近加油錐的過程中會改變自身的縱向平衡,尤其是對于螺旋槳發(fā)動機(jī)的飛機(jī)。
3.4? 在編隊飛行進(jìn)行空中加油時
應(yīng)根據(jù)加油機(jī)的位置來保持受油機(jī)的位置。
在加油輸油過程中,允許在一定的距離、高度上有限的機(jī)動。隨著受油機(jī)飛行重量的增加,飛行員應(yīng)增大動力裝置的推力,評定使用油門桿操縱時所必需的工作轉(zhuǎn)速和必需的推力變化。
4? 結(jié)論
本文總結(jié)了國外固定翼飛機(jī)軟式空中加油技術(shù),包括大型受油機(jī)空中加油飛行控制系統(tǒng)改進(jìn)、尾流場檢查試飛方法、空中加油操縱品質(zhì)試飛方法及評價技術(shù),為我國固定翼飛機(jī)空中加油試飛及受油模態(tài)控制律設(shè)計提供了參考。
參考文獻(xiàn):
[1] ILOPUTAIFE O I, SVOBODA G J, BAILEY T M.Handling qualities design of the C-17A for receiverrefueling: AIAA-96-3746[S]. AIAA Guidance, Navigation and Control Conference, San Diego, California, 1996:29-31.
[2] Military Standard.Flying Qualities of Piloted Aircraft:MIL-STD-1797A[S]. 1990.
[3] 有人駕駛飛機(jī)(固定翼)飛行品質(zhì):GJB 185—86[S].國防科學(xué)技術(shù)工業(yè)委員會,1986.
[4] 李寧,李學(xué)仁.加裝空中加油狀態(tài)嚇得受油機(jī)飛行控制律設(shè)計研究[J].電光與控制,2008,15(8):81-83.
[5] 隋成勇,由勇,楊勇田.新型殲擊機(jī)空中加油飛行仿真建模研究[J].系統(tǒng)仿真學(xué)報,2005,17(6):1336-1338.
[6] GARY L W, MARIA G B, KAMAL M S. Improvements in aerial refueling flight control system for a large receiver aircraft[R].The boeing company, long beach, california, 2021: 19-21.
[7] GUIDRY M, WHITLEY S, MARKOWICH B. Boenig 767 proximity? evaluation with? F/A-18C? and? S-3B aircraft[R].美國政府科技報告,2001:1-74.
[8] KLYDE D H, MITCHELL D G.Handling qualities demonstration maneuvers for fixed-wing aircraft, volume ii: maneuver catalog[R].Flight Dynamics Directorate, Wright Lab., WL-TR-97-3100, Wright-Patterson AFB, OH, 1997.