近景攝影測量在協作機械臂末端重復定位精度中的應用
2024-06-04 08:19:48張啟照
四川建筑 2024年2期
摘要:針對協作機械臂末端重復性定位研究,從近景攝影測量的角度出發,使用基于角錐體原理的空間定位算法,完成了數據采集與算法驗證工作。該方法具有設備組成簡單、操作簡單、使用效率高的特點,在具體的機械臂末端重復定位精度測試中具有一定的使用價值。
關鍵詞:近景攝影測量; 角錐體; 重復定位精度
中圖分類號:P204文獻標志碼:A
0引言
協作機械臂作為一種自動化的設備,廣泛應用于機械制造,食品加工,智能制造、柔性裝配等行業[1]。由于加工誤差和金屬熱脹冷縮等原因產生的誤差,會影響其末端重復定位精度,而機械臂末端的重復定位精度對儀器設備的高精度安裝起關鍵性的作用,機械臂出廠之前需要進行嚴格的末端重復定位精度測試。目前最常用的測試方法有千分表法,全站儀法,激光跟蹤儀法[2]。千分表法依賴于人工讀數,通過讀入每次機械臂末端的碰撞數據并做記錄,比較兩次的數據差值進行重復性研究,這種方法嚴重依賴人工作業,同時由于這種方法需要碰撞試驗,不可避免的會存在碰撞間隙,加大測量誤差[3]。全站儀法是使用高精度測量全站
儀獲取機械臂末端的位置坐標信息,通過距離計算公式獲取機械臂的移動距離以及重復定位指標,這種方法對于現場測試人員技術要求較高,場地需要平坦穩定無遮擋。激光跟蹤儀法是將測量靶球固定于機械臂末端,使用激光跟蹤儀獲取機械臂跟蹤靶球獲取機械臂的位置信息,這種方法精度較高,但是儀器價格昂貴,而且對場地要求嚴格[4]。基于以上分析,本文提出了一種新的機械臂末端重復性定位精度研究新方法,該方法采用近景攝影測量技術,依賴數字圖像處理技術自動化完成機械臂末端重復定位精度研究,并通過實驗分析,驗證了該方法可行性,具備一定的應用價值。
1機械臂末端定位介紹
近景攝影測量技術是指采用數碼相機近距離(一般指100 m以內)拍攝布設合作標志的目標圖像,通過圖像處理技術確定待測物的大小、形狀和幾何位置的技術,目前最常用的合作標志是回光反射標志[5]。
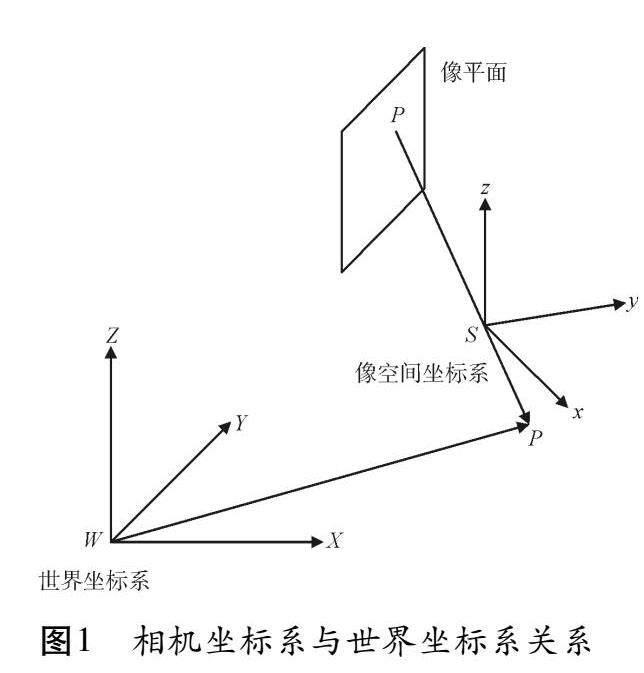
近景攝影測量空間定位是指根據影像計算拍照瞬間相機在世界坐標系的位姿信息(Xs,Ys,Zs,Rx,Ry,Rz)信息,相機坐標系與世界坐標系轉換關系如圖1所示。
目前采用較多的是基于角錐體法的空間后方交會算法,該算法首先使用角錐體原理獲取相機位姿初值,之后將共線條件方程基于歐拉角展開,使用最小二乘迭代計算獲取相機位姿的精確值,完成相機的定位工作。
針對協作機械臂末端重復性定位,本研究將相機固定于機械臂末端,操作機械臂運行至提前設計的空間位置,計算相機在世界坐標系中的位置,使用相機位姿信息表達機械臂末端的重復性。
2空間定位技術
2.1相機檢校
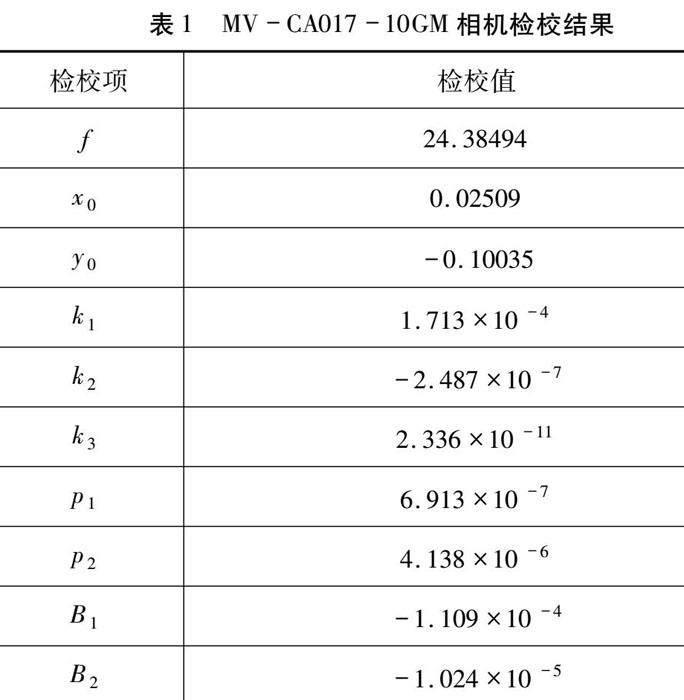
理想的相機成像是物點、攝影中心、像點位于一條直線上。但是由于鏡頭加工工藝、相機內部機械結構不穩定等因素的影響,導致成像的像點總會存在誤差,十參數模型是目前最常采用的削弱誤差的模型,該模型將像主點偏移量(x0,y0)、焦距(f)、鏡像畸變(k1,k2,k3)、切向畸變(P1,P2)、像平面不平行畸變(B1,B2)一共是個參數測量系統的補償參數[6]。相機檢校的目的就是解算出10參數,用于后續的精確測量與計算。針對本實驗使用的海康威視MV-CA017-10GM相機與24 mm鏡頭檢校參數如下:
2.2基于角錐體法計算相機位姿
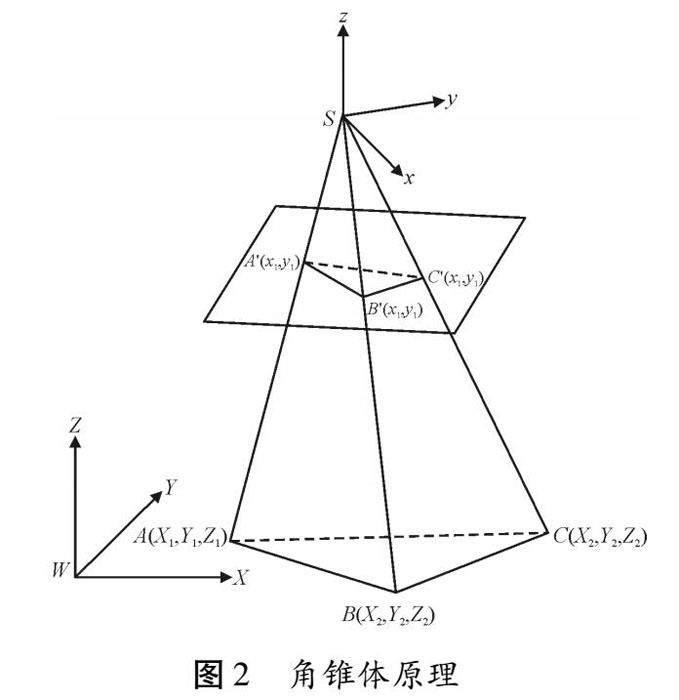
如圖2所示,A(X1,Y1,Z1)、B(X2,Y2,Z2)、C(X3,Y3,Z3)為3個控制點,其相應像點為A′(x1,y1)、B′(x2,y2)、C′(x3,y3),到攝站S的距離分別為dAS、dBS、dCS;ΔABC邊長B2-1.024×10-5分別為dAB、dBC、dAC; ∠ASB、∠BSC、∠ASC分別為α、β、γ。
在ΔASB、ΔBSC、ΔASC中,由余弦定理可得:
d2AB=d2AS+d2BS-2dASdBScosα
d2BC=d2BS+d2CS-2dBSdCScosβ
d2AC=d2AS+d2CS-2dASdCScosγ(1)
式中:α、β、γ可在ΔA′SB′、ΔB′SC′、ΔA′SC′中由余弦定理獲得。
設距離dAS、dBS、dCS比值為1∶n∶m,即式(2)。
dBS=n·dAS
dCS=m·dAS(2)
將式(2)代入式(1),可得式(3)。
d2AB=d2AS+(dAS·n)2-2d2ASncosα
d2BC=(dAS·n)2+(dAS·m)2-2d2ASnmcosβ
d2AC=d2AS+(dAS·m)2-2d2ASmcosγ(3)
消去dAS、m可得式(4)。
w1n4+w2n3+w3n2+w4n+w5=0(4)
答解式(4)可得n值,由于該式為一元四次方程,共有4個根。此時,可再加入一個控制點D,利用A、B、D三點求得另一組n值,選取兩組中相同的一個即為實際距離比值。將其代入式(4)可得距離dAS、dBS、dCS即式(5)。
dAS=dAB21+n2-2ncosα
dBS=dAS·n
dCS=dAS·m=d2BC-d2AC+d2AS-d2BS2(dAScosγ-dBScosβ)(5)
在像空間坐標系S-xyz中,像點A′、B′、C′坐標分別為:A′(x1,y1,-f)、B′(x2,y2,-f)、C′(x3,y3,-f)。由比值dSA′/dSA、dSB′/dSB、dSC′/dSC可得A、B、C在像空間坐標系中坐標(Xis,Yis,Zis)(i=1,2,3)見式(6)。
建筑設備與建筑材料張啟照: 近景攝影測量在協作機械臂末端重復定位精度中的應用
X1s=dAS·x1x21+y21+f2
Y1s=dAS·y1x21+y21+f2
Z1s=-dAS·fx21+y21+f2
X2s=dBS·x2x22+y22+f2
Y2s=dBS·y2x22+y22+f2
Z2s=-dBS·fx22+y22+f2(6)
X3s=dCS·x3x23+y23+f2
Y3s=dCS·y3x23+y23+f2
Z3s=-dCS·fx23+y23+f2
已知3個控制點A、B、C在像空間坐標系和物方空間坐標系中坐標(Xis,Yis,Zis);(i=1,2,3)、(Xi,Yi,Zi),便可通過公共點轉換答解像空間坐標系與物方空間坐標之間的轉換參數,由此,便可求得攝站參數值(Xs,Ys,Zs,Rx,Ry,Rz)[7],將計算的位姿使用最小二乘迭代計算,即可獲取精確解。
3試驗結果及分析
3.1建立世界坐標系
建立世界坐標系的目的是將后期所有的數據準均以此為基準進行對比分析。將回光反射編碼點與單點布設于2 000 mm×2 000 mm區域的墻壁,布設完畢之后在控制網前方采用交向攝影的方式采集50張影像,使用近景攝影測量V-STARS系統進行處理獲取每一個編碼點的物方坐標,如表2所示,布設的控制場點位如圖3所示。
3.2數據獲取及結果分析
調整相機視場,以能滿幅采集到整個控制場為準。使用機械臂的拖動示教功能,拖動機械臂并記錄位置軌跡數據,保存成唯一的控制文件,之后調整機械臂按照規劃好的路徑進行移動,并在指定的停留位置觸發傳感器采集圖像,通過機械臂示教器記錄下每個停留位置的坐標值(X,Y,Z),如表3所示,傳感器采集圖像位置如圖4所示,協作機械臂如圖5所示。
本次實驗設計16個機械臂的移動位置,進行3次重復性實驗,通過示教器獲取機械臂給出的實時位置信息,并采集每個位置的圖像,根據基于角錐體法計算相機位姿算法,解算獲取機械臂每處位置的位姿數據。并通過三維坐標按照機械臂運動順序計算兩個點位之間的距離值,與示教器上距離值進行對比分析,分析數據如表4所示,其中Rms值為:0.289 mm;根據測量數據分析,使用近景攝影測量的方法能夠滿足機械臂末端重復性定位的研究工作。
4結論
論述了使用近景攝影測量方法進行機械臂末端重復性定位研究的工作具體步驟,推導了基于角錐體原理空間定位的算法步驟,最后通過實驗進行數據的采集與分析。驗證了使用該方法進行協作機械臂末端定位的可行性,具備一定的使用價值,該方法具有優點:
(1)設備組成簡單。僅使用一臺普通數碼相機與配合的標志點即可完成數據的采集工作。
(2)運行效率高。機械臂運動過程中即可完成數據的采集,與機械臂其余測試工作可以并行。
(3)算法精度高,使用基于角錐體原理的空間定位算法,經過多次迭代獲取數值的精確解。
實驗中沒有考慮針對不同溫度與濕度影響下的該方法的機械臂重復定位精度,這是下一步需要研究的重點。
參考文獻
[1]董陽. 面向機械臂抓取應用的視覺識別與定位技術研究[D].沈陽:沈陽工業大學,2022.
[2]鮑丹,侯保林. 基于深度學習的單自由度機械臂定位可靠性估計[J]. 振動與沖擊,2021,40(15):246-252+283.
[3]劉繼宗. 基于視覺引導的機械臂定位抓取研究與實現[D].重慶:重慶郵電大學,2021.
[4]韓碩. 基于機器視覺定位的機械臂運動學分析與研究[D].北京:北京交通大學,2021.
[5]李江濤,潘春強,劉偉,等. 關于數字近景工業攝影測量的關鍵技術及其應用[J]. 電子元器件與信息技術,2021,5(9):164-165.
[6]黃桂平. 數字近景工業攝影測量關鍵技術研究與應用[D].天津:天津大學,2005.
[7]官云蘭,周世健,周銘,等. 基于角錐體原理的空間后方交會改進算法[J]. 測繪科學,2006,(2):27-28+3.
[基金項目]鄭州財經學院第二批“提質工程”建設項目(項目編號:TZGC-JGXM-2022-28)
[作者簡介]張啟照 (1981—),女,本科,副教授,主要從事土木工程教學與研究工作。
