輸電線路運行故障無人機定位及準(zhǔn)確性測試
2024-06-04 06:32:02山西昊翔能源集團有限公司鄭建松
電力設(shè)備管理 2024年7期
山西昊翔能源集團有限公司 鄭建松
無人機技術(shù)快速發(fā)展,將其應(yīng)用于輸電線路運行故障定位時,能夠提高故障定位精度,即便遇到惡劣天氣也仍然保持較高的故障識別率,因此該項技術(shù)在輸電線路運行故障定位中具有推廣價值。基于此,本文重點研究無人機應(yīng)用策略并根據(jù)仿真結(jié)果評價技術(shù)應(yīng)用效果,以供參考。
1 無人機故障定位原理
輸電線路故障定位時,在圖像中建立坐標(biāo)軸,尋找一組含有3條及以上的直線,但由于無人機搭載的相機傾斜,以及輸電線路建設(shè)場地存在復(fù)雜地形,多種因素均會干擾等距識別過程,影響檢測結(jié)果的準(zhǔn)確性[1]。因此,本文在采用無人機技術(shù)定位輸電線路運行故障時,輔以圖像正射校正技術(shù),原理如圖1所示。
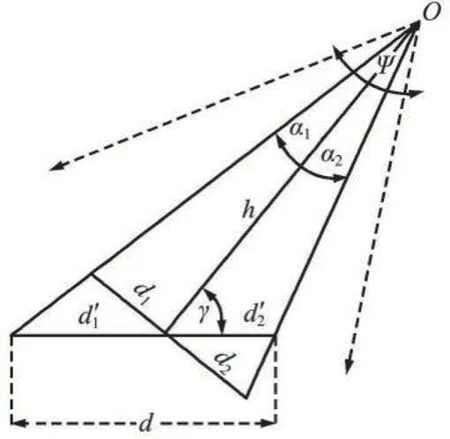
圖1 圖像正射校正原理圖
圖中:d1和d2分別為中心線路與左、右兩側(cè)線路的扭曲距離;d`1和d`2分別為中心線路與左、右兩側(cè)線路的真實距離;Ψ為無人機視野;γ為相機拔模角度。針對現(xiàn)場干擾因素對檢測結(jié)果準(zhǔn)確性產(chǎn)生的不良影響,采用不同角度和已知距離的幾何關(guān)系進(jìn)行消除,從而實現(xiàn)輸電線路圖像正射校正效果,提高故障定位精度。上述幾項參數(shù)的關(guān)系,如公式(1)所示:
式中:a1和a2為輸電線實點與焦點間的角度;h為無人機距輸電線參照高度。
設(shè)定無人機距離輸電線參照高度h,無人機于該處采集多幅圖像后提取特征點并確定彼此間的距離,以便故障定位。將測量參考距離和參考高度與相機高度關(guān)聯(lián)的反向線性函數(shù)來確定真實高度H,如公式(2)計算:
式中:D為輸電線路圖像中的參考距離。若要確定相機相對于中心輸電線的估計x位置 和估計y位置 ,先在離線模式下建立參考坐標(biāo)軸,再按照公式(3)計算確定:
式中:δ為相機圍繞Z軸的旋轉(zhuǎn)角度。基于視覺的定位方式受天氣條件影響,若遇到大霧天氣,由于霧氣遮擋而導(dǎo)致傳輸線路不可見,則無法實現(xiàn)定位[2]。在本次研究中,采用的無人機搭載慣性測量單元附加傳感器,高斯概率密度函數(shù)與傳感器相關(guān)聯(lián),能夠用于估計無人機的空間定位,關(guān)系式為:
公式(4)~公式(6)中:z為傳感器的空間位置測量值,σ2為測量值的方差,以倒數(shù)相加的方式可確定新的測量角度估計值加權(quán)平均值和新的測量度方差σ2θ。
在確定定位參數(shù)后,能夠確保遇到各類特殊天氣時仍正常進(jìn)行無人機故障定位,即根據(jù)定位參數(shù)確定無人機位置與輸電線路位置關(guān)系。
2 無人機故障定位準(zhǔn)確性檢驗
檢驗試驗平臺采用Matlab 軟件搭建,底層數(shù)據(jù)采用線路狀況分析信息、線路綜合監(jiān)測信息等,根據(jù)高效、準(zhǔn)確的數(shù)據(jù)傳輸要求,依靠交換機和數(shù)據(jù)庫實現(xiàn)傳輸。研究對象為郊外多個輸電線塔中間段的輸電線路,試驗數(shù)據(jù)采用的是該部分線路在2023年1月至3月由故障檢測裝置采集到的運行數(shù)據(jù),主要包含輸電線路截面、額定電壓、安全電流、直流電阻幾項基本數(shù)據(jù),統(tǒng)計結(jié)果如圖2所示。
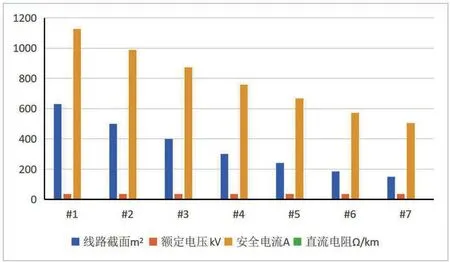
圖2 試驗數(shù)據(jù)統(tǒng)計圖
試驗數(shù)據(jù)庫由圖2中的統(tǒng)計數(shù)據(jù)組成,針對該部分?jǐn)?shù)據(jù)進(jìn)行試驗操作。測試#3段輸電線路在9:00~18:00時間段圖像噪聲過濾處理的有效性,將采集的參數(shù)代入Matlab 仿真軟件已構(gòu)建的數(shù)據(jù)信息模型中,向模型中輸入線路狀況分析信息、線路綜合監(jiān)測數(shù)據(jù)信息,從數(shù)據(jù)庫服務(wù)器提取不同的數(shù)據(jù)信息后進(jìn)行仿真,涉及的流程包含頭像去模糊、Hough 變換、正射影像校正、估計距離等[3-4]。按照本文方法確定圖像信息參數(shù)后,將文獻(xiàn)[1]的輸電線路故障智能定位方法的結(jié)果與之進(jìn)行對比分析,評價本文方法的有效性。輸電線路故障智能定位的原理是將三相電路中互相耦合的向量進(jìn)行相模變化,產(chǎn)生獨立量,再采集電流模,生成故障行波,分析波速,在Matlab 仿真軟件中進(jìn)行仿真,結(jié)果如圖3所示。
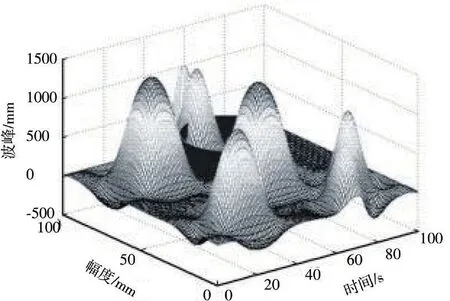
圖3 故障智能定位方法仿真結(jié)果
輸入數(shù)據(jù)信息類型包含線路綜合監(jiān)測、線路狀態(tài)分析以及決策分析相關(guān)的數(shù)據(jù)信息,具體細(xì)分為分析時間、監(jiān)測數(shù)據(jù)信息、波峰、幅度等,匯總數(shù)據(jù)信息后,使用故障智能定位方法仿真,建立相模變換模型,獲取電流模行波速度和電流模(屬于導(dǎo)致線路發(fā)生短路故障的關(guān)鍵因素),生成故障行波并進(jìn)行分析。在構(gòu)建等效電路圖后,基于戴維南定理計算,為實現(xiàn)輸電線路故障智能定位這一最終目標(biāo),采用拉普拉斯對等效電路進(jìn)行電路換算。
從不同函數(shù)曲線呈現(xiàn)的三維圖像來看,具有較大幅度的起伏變化,圖像處理的平滑度較差,噪聲變化表現(xiàn)不夠平坦,導(dǎo)致此現(xiàn)象的主要原因在于無人機空間定位能力差、架空輸電線路故障能力弱、傳輸線檢測水平低以及圖像預(yù)處理效果不良。在輸電線路運行與維護(hù)時,系統(tǒng)的工作狀態(tài)可通過系統(tǒng)工作站和網(wǎng)絡(luò)服務(wù)器的運行狀態(tài)予以反映,檢測輸電線路的過程中,數(shù)據(jù)被各節(jié)點的傳輸模塊壓縮和恢復(fù),此操作方式有助于提高數(shù)據(jù)信息處理能力。
根據(jù)試驗結(jié)果得知,本文提出的無人機故障定位檢測方法除了能夠高效定位輸電線路故障外,還可以根據(jù)檢測信息進(jìn)行圖像處理,處理結(jié)果具有參考意義,綜合應(yīng)用效果良好。本文提出的無人機故障定位檢測方法的仿真結(jié)果如圖4所示。
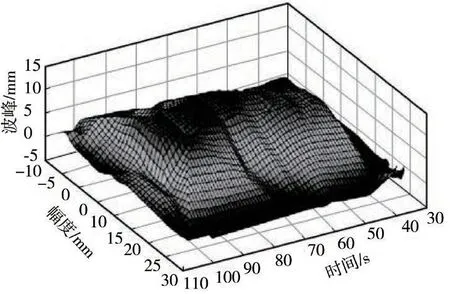
圖4 本文方法的仿真結(jié)果
根據(jù)圖3、圖4對比分析結(jié)果可知,采用本文方法后,圖像處理效果良好,噪聲變化較平坦,處理結(jié)果的平滑性更優(yōu),表明按照圖像預(yù)處理、傳輸線檢測以及無人機空間定位的流程進(jìn)行操作后,能夠改善圖像處理效果。濾波期間輸入原始輸電線路圖,采用Sobel 檢測器執(zhí)行濾波操作,能夠強化邊緣效應(yīng),所得結(jié)果更具參考價值,說明圖像過濾處理性能可靠。
為進(jìn)一步檢驗本文算法對輸電線路運行故障的檢測性能,引入卷積神經(jīng)網(wǎng)絡(luò)優(yōu)化YOLOv3模型和K-Means 聚類算法,根據(jù)平均精度O 判斷各算法的性能。每個訓(xùn)練批次均包含10張圖像,進(jìn)行模型訓(xùn)練,損失函數(shù)在經(jīng)過20h 的訓(xùn)練后不再表現(xiàn)出下降變化趨勢。以2GB 輸電線路圖像為對象,采用本文方法和兩種對比算法進(jìn)行計算故障定位,訓(xùn)練次數(shù)均設(shè)為6次,確定各算法的平均精度O 值,結(jié)果見表1。
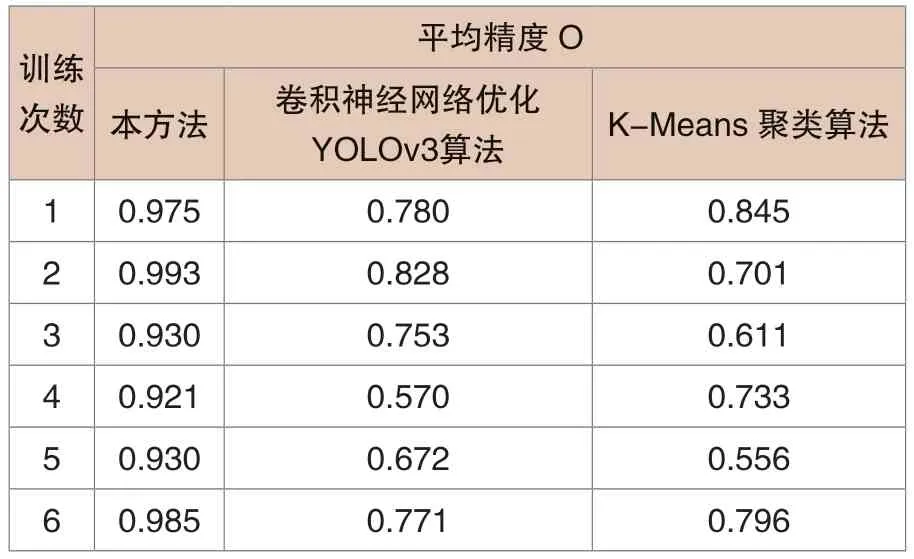
表1 各算法平均精度統(tǒng)計表
根據(jù)表2的對比數(shù)據(jù)可知,相同算法在不同訓(xùn)練次數(shù)時的平均精度O 各不相同,難以準(zhǔn)確判斷三種算法的優(yōu)劣。基于此,向仿真軟件中輸入試驗結(jié)果,根據(jù)各算法的準(zhǔn)確性做進(jìn)一步對比分析,進(jìn)而檢驗各算法的性能,結(jié)果見表2。

表2 試驗結(jié)果對比
根據(jù)表3的準(zhǔn)確性統(tǒng)計結(jié)果可知,在試驗次數(shù)為1次~6次時,本文方法的準(zhǔn)確性均高于其他兩種算法,在試驗全過程中,本文方法的故障定位準(zhǔn)確性最低為92%,最高為99%,均高于90%,且以第2次試驗的準(zhǔn)確性優(yōu)勢更為明顯,遠(yuǎn)超過其他兩種算法。各算法的準(zhǔn)確性對比分析結(jié)果表明,本文算法在輸電線路運行故障定位中具有良好的適用性,滿足高精度、高效率的故障定位要求。
3 結(jié)語
綜上所述,無人機在輸電線路運行故障檢測中的應(yīng)用頻率逐步提高,采用機器視覺立體測量技術(shù),搭載衛(wèi)星雷達(dá),集軟件和硬件的優(yōu)勢于一體,顯著提高輸電線路運行故障定位精度,并兼具安全、高效等特點,在復(fù)雜地形、交叉跨越等特殊情況下均能夠有效定位輸電線路運行故障。經(jīng)過本文試驗和對比分析,驗證了輸電線路運行故障無人機定位技術(shù)的有效性,在未來的技術(shù)發(fā)展中,相關(guān)人員需要進(jìn)一步深化技術(shù)原理,積累經(jīng)驗,持續(xù)提高無人機技術(shù)在輸電線路運行故障定位中的應(yīng)用水平。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50